Изобретение относится к подъемно-транспортным машинам, в частности к робототехнике, для проведения погрузочно-разгрузочных и прочих работ, выполняемых мобильными подъемно-транспортными агрегатами с ограниченной грузоподъемностью.
Известен кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех гидроцилиндров соединены между собой и с грузозахватным органом, при этом для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания (патент РФ №205319), опубл. 1996).
Известен манипулятор-трипод промышленного назначения, содержащий основание, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира и с грузозахватным органом, согласно изобретению исполнительные звенья выполнены в виде линейных приводов, каждый из которых соединяется между собой и с двухстепенным управляемым захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев в виде полусфер и грузозахватным органом, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, оси симметрии звеньев двухстепенного управляемого захвата перпендикулярны друг другу, а ось симметрии пятиподвижного сферического шарнира совпадает с одной из осей двухстепенного управляемого захвата, каждое звено имеет жесткое крепление с шаговым двигателем, основание выполнено в виде равностороннего треугольника, на котором установлены датчики технического зрения (RU Патент РФ №2651781, опубл. 2018).
Известен робот-манипулятор, содержащий основание, на котором установлен датчик технического зрения, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира, выполненные в виде линейных приводов, грузозахватный орган, отличающиеся тем, что дополнительно содержит четыре стойки, два линейных привода и платформу самоходного шасси при этом, каждая стойка имеет крепление с основанием и с платформой самоходного шасси посредством сферических шарниров с кинематической парой третьего класса, которые образуют пространственно-параллелограммный механизм, один из линейных приводов одним концом крепится к стойке на высоту 1/3 от общей высоты стойки посредством цилиндрических шарниров с кинематической парой пятого класса, а другим концом крепится к платформе самоходного шасси посредством сферических шарниров с кинематической парой третьего класса, на одной линии креплений стоек, второй линейный привод одним концом крепится к другой стойке на высоту 1/3 от общей высоты стойки посредством цилиндрических шарниров с кинематической парой пятого класса, а другим концом крепится к платформе самоходного шасси посредством сферических шарниров с кинематической парой третьего класса, шарнир которого находится на одной линии с шарнирами крайних стоек имеет, дополнительные датчики технического зрения, которые установлены в передней части самоходного шасси, что захват выполнен самоустанавливающимся, основание выполнено в виде прямоугольной фермы, с тремя выступами для крепления линейных приводов (RU Патент №2725367, опубл. 2019).
Недостатками известных технических решений является недостаточные функциональные возможности и громоздкость конструкции.
Техническая проблема - не обеспечиваются достаточные функциональные возможности из-за громоздкости конструкции.
Технический результат - обеспечение достаточных функциональных возможностей за счет упрощения конструкции.
Технический результат достигается роботом-манипулятором, содержащий самоходное шасси с размещенным на нем основанием, на котором расположены исполнительные звенья, выполненные в виде силовых линейных приводов, и управляемый грузозахватный орган, при этом два силовых линейных привода своими основаниями крепятся к основанию самоходного шасси посредством поворотных опор, а штоками сходятся в общем пространственном шарнире, который посредством цапф крепится на балке, при этом для жесткости конструкции, балка опирается посредством подвижного шарнира на упоры, соединенные между собой жесткой соединительной планкой, при этом упоры имеют жесткое крепление с поверхностью основания, при этом на поверхности балки шарнирно закреплено основание исполнительного звена выполненного в виде силового линейного привода, при этом шток упомянутого силового линейного привода соединен с управляемым грузозахватным органом, при этом на поверхности жесткой соединительной планки установлен оптический датчик, который передает сигнал на блок управления, при этом блок управления задает величину перемещения силовым линейным приводам и контролирует слаженность их работы, при этом на поверхности основания в передней части самоходного шасси установлен датчик угла наклона, который фиксирует угол наклона самоходного шасси к поверхности земли, по которой перемещается, при этом в случае превышения заданного значения угла наклона самоходного шасси к поверхности земли по которой идет перемещение, от датчика угла наклона передается сигнал на блок управления и движение самоходного шасси останавливается, отдается команда на изменение траектории движения самоходного шасси, при этом обеспечение достаточных функциональных возможностей достигается совместной работой силовых линейных приводов и упрощенной конструкции робота-манипулятора.
Изобретение поясняется чертежами.
На фигуре 1 представлен робот-манипулятор с возможностью установки его на самоходном шасси, общий вид.
На фигуре 2 представлен робот-манипулятор в работе.
Сведения, подтверждающие возможность реализации заявленного изобретения заключаются в следующем.
Робот-манипулятор (Фиг. 1), содержит самоходное шасси 1 с размещенным на нем основанием 2, на котором расположены исполнительные звенья, выполненные в виде силовых линейных приводов 3, 4, 5, и управляемый грузозахватный орган 6. Два силовых линейных привода 3, 4 своими основаниями крепятся к основанию 2 самоходного шасси 1 посредством поворотных опор 7, а штоками 8 сходятся в общем пространственном шарнире 9, который посредством цапф крепится на балке 10. Для жесткости конструкции, балка 10 опирается посредством подвижного шарнира 11 на упоры 12, соединенные между собой жесткой соединительной планкой 13. Упоры 12 имеют жесткое крепление 14 с поверхностью основания 2. На поверхности балки 10 шарнирно 15 закреплено основание исполнительного звена выполненного в виде силового линейного привода 5. Шток 16 упомянутого силового линейного привода 5 соединен с управляемым грузозахватным органом в.. На поверхности жесткой соединительной планки 12 установлен оптический датчик 17, который передает сигнал на блок управления 18. Блок управления 18 задает величину перемещения силовым линейным приводам 3, 4, 5 и контролирует слаженность их работы. На поверхности основания 2 в передней части самоходного шасси 1 установлен датчик угла наклона 19, который фиксирует угол наклона самоходного шасси 1 к поверхности земли, по которой перемещается. В случае превышения заданного значения угла наклона самоходного шасси 1 к поверхности земли по которой идет перемещение, от датчика угла наклона передается сигнал на блок управления 18 и движение самоходного шасси 1 останавливается, отдается команда на изменение траектории движения самоходного шасси I. Обеспечение достаточных функциональных возможностей достигается совместной работой силовых линейных приводов 3, 4, 5 и упрощенной конструкции робота-манипулятора. Робот-манипулятор работает следующим образом.
Самоходное шасси 1 перемещающееся по поверхности земли, распознает необходимый объект для выполнения операции его перемещения благодаря оптическому датчику 17, который передает сигнал на блок управления 18, а тот задает необходимую величину перемещения штокам 8, 16 силовых линейных приводов 3, 4, 5 и контролирует слаженность их работы совместно с управляемым грузозахватным органом 6, который захватывает и перемещает объект в указанное место. Поочередной работой силовых линейных приводов 3, 4, штоки 8 которых сходятся в общем пространственном шарнире 9, достигается расширенная зона обслуживания управляемого грузозахватного органа 6 (Фиг. 2). Работой силового линейного привода 5 соединенного с управляемым захватом 6 достигается регулирование длины выноса управляемого грузозахватного органа 6. На поверхности основания 2 в передней части самоходного шасси 1 установлен датчик угла наклона 19, который фиксирует угол наклона самоходного шасси 1 к поверхности земли, по которой перемещается. В случае превышения заданного значения угла наклона самоходного шасси 1 к поверхности земли, по которой идет перемещение, от датчика угла наклона передается сигнал на блок управления 18 и движение самоходного шасси 1 останавливается и отдается команда на изменение траектории движения самоходного шасси 1 в сторону от возвышенности, угол подъема которой превышает заданное значение, чтобы предотвратить опрокидывание робота-манипулятора.
Таким образом, обеспечивается расширение функциональных возможностей за счет упрощенной конструкции робота-манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-погрузчик сеток с овощами | 2019 |
|
RU2722747C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2763624C1 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2764855C1 |
| Погрузочно-транспортный агрегат | 2022 |
|
RU2776189C1 |
| Кран-манипулятор с расширенной зоной действия | 2021 |
|
RU2768059C1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Автоматизированный сортировщик-подборщик манипулятора-трипода | 2019 |
|
RU2722960C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |


Изобретение относится к подъемно-транспортным машинам, в частности к робототехнике, для проведения погрузочно-разгрузочных и прочих работ, выполняемых мобильными подъемно-транспортными агрегатами с ограниченной грузоподъемностью. Робот-манипулятор содержит самоходное шасси с размещенным на нем основанием, на котором расположены исполнительные звенья, выполненные в виде силовых линейных приводов, и управляемый грузозахватный орган. Два силовых линейных привода своими основаниями крепятся к основанию самоходного шасси посредством поворотных опор, а штоками сходятся в общем пространственном шарнире, который посредством цапф крепится на балке. Балка опирается посредством подвижного шарнира на упоры, соединенные между собой жесткой соединительной планкой для жесткости конструкции. Упоры имеют жесткое крепление с поверхностью основания. На поверхности балки шарнирно закреплено основание исполнительного звена выполненного в виде силового линейного привода. Шток упомянутого силового линейного привода соединен с управляемым грузозахватным органом. На поверхности жесткой соединительной планки, для передачи сигнала на блок управления, установлен оптический датчик. На поверхности основания в передней части самоходного шасси, для фиксации угла наклона самоходного шасси к поверхности земли, установлен датчик угла наклона. Достигается обеспечение функциональных возможностей за счет упрощенной конструкции робота-манипулятора. 2 ил.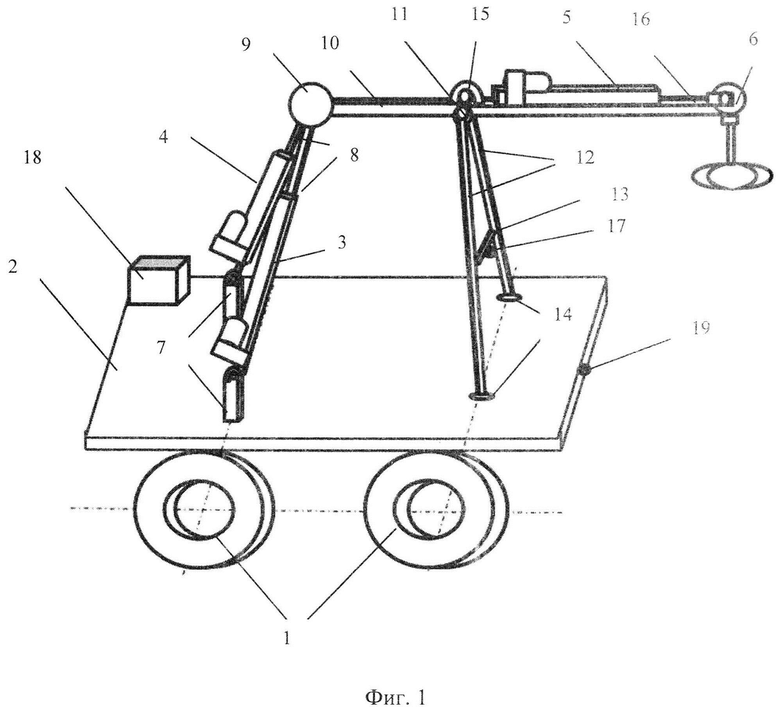
Робот-манипулятор, содержащий самоходное шасси с размещенным на нем основанием, на котором расположены исполнительные звенья, выполненные в виде силовых линейных приводов, и управляемый грузозахватный орган, при этом два силовых линейных привода своими основаниями крепятся к основанию самоходного шасси посредством поворотных опор, а штоками сходятся в общем пространственном шарнире, который посредством цапф крепится на балке, при этом для жесткости конструкции балка опирается посредством подвижного шарнира на упоры, соединенные между собой жесткой соединительной планкой, при этом упоры имеют жесткое крепление с поверхностью основания, при этом на поверхности балки шарнирно закреплено основание исполнительного звена, выполненного в виде силового линейного привода, при этом шток упомянутого силового линейного привода соединен с управляемым грузозахватным органом, при этом на поверхности жесткой соединительной планки, для передачи сигнала на блок управления, установлен оптический датчик, при этом на поверхности основания в передней части самоходного шасси, для фиксации угла наклона самоходного шасси к поверхности земли, установлен датчик угла наклона.
| ДВОЙНОЙ ВОЛНОВОДНЫЙ ПЕРЕКЛЮЧАТЕЛЬ НА КРУГЛОМ ВОЛНОВОДЕ | 0 |
|
SU204398A1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| EP 2987761 A1, 24.02.2016. | |||

