Изобретение относится к подводному судостроению, в частности к перемещению подводных объектов, преимущественно к неатомным подводным аппаратам большой автономности, путем образования струи и создания движущей продольной силы.
Известен погружной кольцевой судовой движитель (патент №2526303 RU, приоритет от 05.03.2013), состоящий из кольцевого статора, кольцевого ротора, снабженного лопастной системой.
Известны и другие двигательно-движительные комплексы (патент №2204502 RU, приоритет от 18.07.2001; патент №2585207 RU, приоритет от 22.12.2014).
Известна движительная установка с встроенным двигателем для водных транспортных средств с несколькими электродвигателями, приводящими в действие один гребной винт (патент US 5252875, приоритет от 28.03.1991, этот патент принят за прототип). Погружной движитель представляет собой цилиндрическую насадку, внутри которой установлены две идентичные обмотки статора синхронного привода, гребной винт со ступицей, в которую установлен опорно-упорный подшипник, два идентичных ротора, закрепленных на периферии гребного винта, намагниченность которых обеспечивается постоянными магнитами.
Действие устройства заключается в преобразовании электрической энергии в механическую посредством гидродинамической передачи. Тяга образуется за счет реакции отбрасываемой струи. Изменение тяги достигается за счет изменения мощности (частоты вращения) гребного винта. Гидродинамический упор воспринимается опорно-упорным подшипником, охлаждающимся и смазывающимся забортной водой.
К недостаткам прототипа относятся:
- невозможность достижения заданного высокого КПД (0,95) двигателя на режиме экономического хода при мощности в сотни раз меньшей по отношению к мощности в режиме полного хода при использовании синхронного электродвигателя (СЭД) с постоянными магнитами в роторе, диаметром более одного метра и ограничением двигателя по массе;
- сложность использования низковольтных кольцевых двигателей с большими диаметрами расточки ротора, малой толщины ротора и статора и значительной мощности, требующих разбиения обмотки на параллельные секции, приводящие к появлению уравнительных соединений или большого количества герметичных токовводов;
- необходимость использования системы термостатирования силовых ключей инвертора, установленных в прочном корпусе аппарата.
Задача, решаемая данным изобретением - создание движителя для подводного аппарата (ПА), обладающего большой дальностью, возможностью форсажного хода и тем самым расширяющего функциональные возможности аппарата, а также повышение его надежности. Для этого движитель должен иметь высокий КПД на всех режимах работы, простую конструкцию с минимальным количеством систем.
Поставленная задача достижения высокого КПД в режимах полного хода и экономического хода достигается за счет изменяемой индукции магнитного поля ротора кольцевого электродвигателя с постоянными магнитами.
Решение проблемы использования подводных низковольтных двигателей достигается путем размещения в статоре (насадке) силовых ключей инвертора. Параллельно работающие инверторы соединены с независимыми секциями обмотки, в этом случае нет необходимости в уравнительных соединениях.
Все секции обмотки питаются от своего секционного инверторного моста, который контролирует и выравнивает ток в группе катушек, расположенных в диаметрально противоположных секторах двигателя. Для питания двигателя необходимы всего два провода (шины), рассчитанные на ток постоянного напряжения, благодаря чему уменьшается количество токовводов в прочный корпус ПА и увеличивается коэффициент использования проводников при отсутствии скин-эффектов.
Также установка инвертора за борт ПА решает проблему его охлаждения. Не требуется дополнительная система термостатирования (охлаждения), устанавливаемая в прочный корпус (ПК) ПА, что повышает надежность, улучшает массогабаритные характеристики и упрощает конструкцию аппарата.
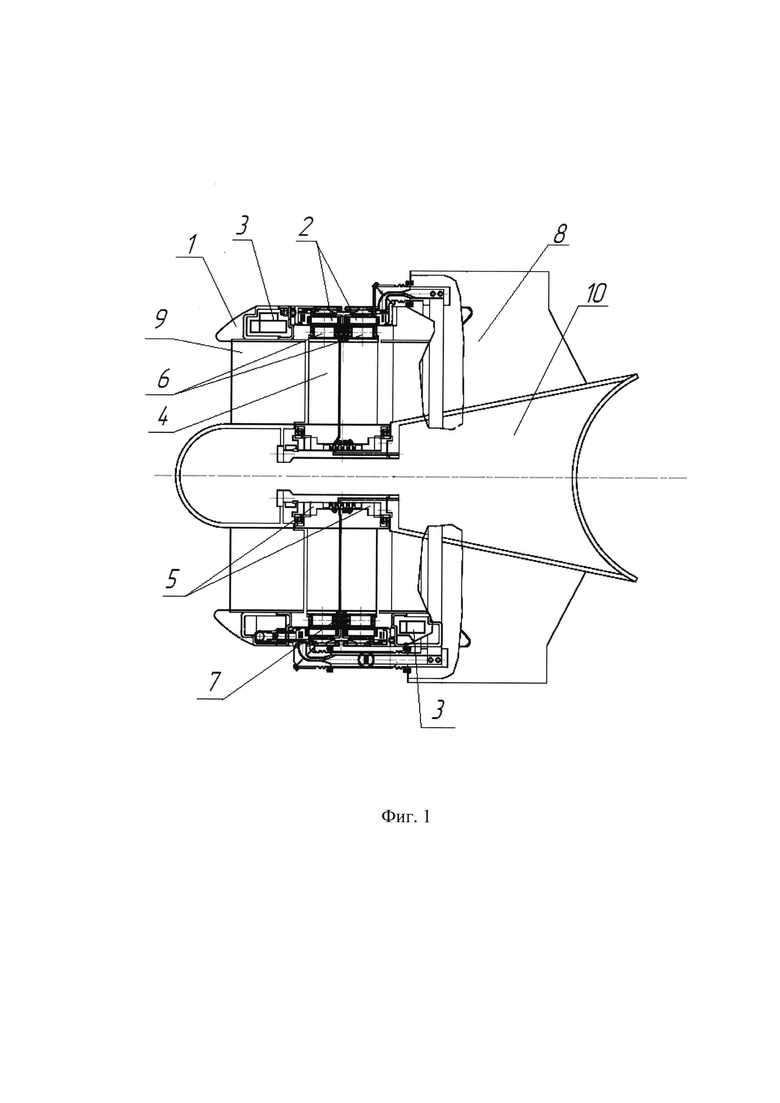
На фиг. 1 представлен общий вид кольцевого движителя, состоящего из:
- насадки 1, в которую интегрирован статор 2 синхронного многополюсного двигателя с продольным и тангенциальным секционированием;
- статора 2 монолитного, залитого жестким компаундом, с интегрированными силовыми ключами 3;
- винта 4 со ступицей, в которой установлен опорно-упорный подшипник 5;
- ротора 6, интегрированного в обечайку винта, с механизмом 7 изменения индукции магнитного поля ротора;
- пилонов 8 и спрямляющего аппарата 9, выполняющих функцию жесткого крепления насадки к кормовому обтекателю 10.
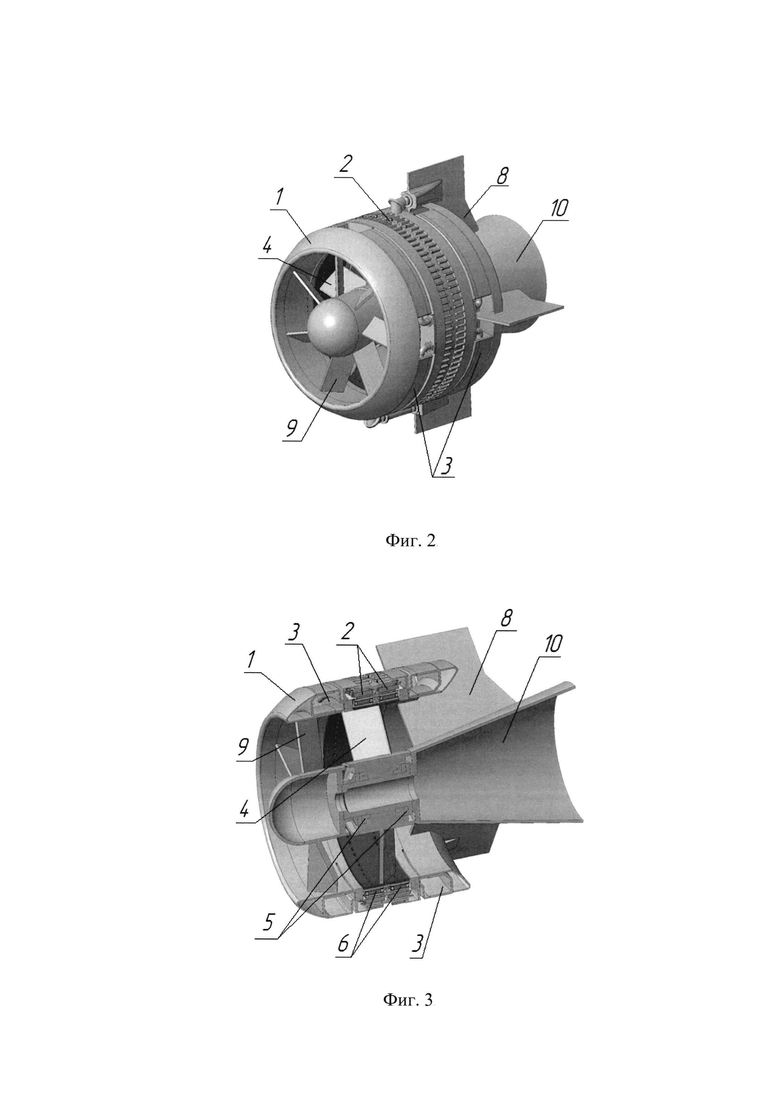
На фиг. 2 представлено трехмерное изображение движительного комплекса с кольцевым электродвигателем.
На фиг. 3 представлено трехмерное изображение движителя в сечении.
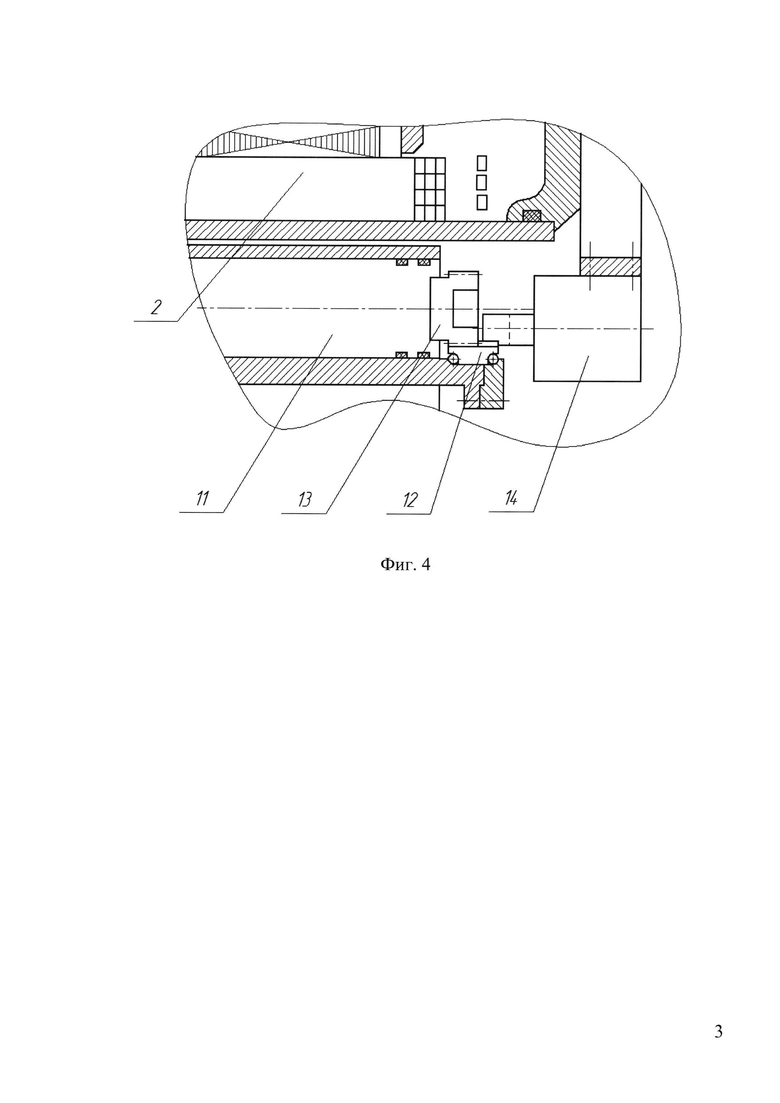
На фиг. 4 представлен механизм 7 изменения индукции магнитного поля ротора.
Статор 2 состоит из сердечника, обмотки, нажимных колец. Бандажных колец двигатель не имеет. Статор 2 двигателя имеет секционирование, в продольном направлении разделен на две идентичные не связанные общим магнитным потоком части, что повышает надежность СЭД и позволяет гибко организовывать режимы частичных нагрузок.
Сердечник статора 2 собирается из штампованных сегментов анизотропной электротехнической стали, запрессовывается между нажимными кольцами и фиксируется от перемещения с помощью шпонок. Сборка сердечника производится непосредственно в корпусе статора.
Корпус статора 2 представляет собой стальную обечайку с аксиальными разъемами, позволяющими собрать обмотку в ограниченном пространстве. В листах сердечника статора выполнены прямоугольные пазы, в которые уложена обмотка. Обмотка статора состоит из трехфазной «звезды» с укорочением шага. Схема обмотки содержит один виток и выполнена из литцендрированного прямоугольного проводника. Все фазные катушки включены последовательно.
В каждом сечении двигателя проходит не более трех соединений, рассчитанных на полный фазный ток. В корпус статора 2 встроены силовые ключи 3 инвертора. В этом случае нет необходимости в уравнительных соединениях. Все секции обмотки питаются от своего секционного инверторного моста.
Инверторный мост контролирует и выравнивает ток в группе катушек, расположенных диаметрально противоположно. Для питания двигателя необходимы всего два провода (шины), рассчитанных на ток постоянного напряжения. Для максимального увеличения коэффициента заполнения паза (с целью увеличения КПД и снижение потерь в двигателе) катушки наматываются непосредственно на полюсе статора.
Полюсы устанавливаются в корпус статора 2, фиксируются винтами к шпонкам и расклиниваются изоляционными немагнитными клиньями в межполюсном зазоре. Между магнитопроводами полюсов сохраняется гарантированный минимальный паразитный зазор. Для контроля температуры в обмотке предусмотрена установка термопреобразователей сопротивления, которые укладываются в лобовых зонах с равномерным распределением по окружности.
Ротор 6, как и статор 2 секционирован в осевом направлении, концентрично располагается во внутренней расточке статора 2. Он снабжен механизмом 7 изменения индукции магнитного поля ротора и представляет собой сборную конструкцию, состоящую из винта 4, выполненного как единое целое с обечайкой и ступицей, магнитопровода, собранного на обечайке винта, постоянных магнитов в виде магнитных блоков 11, которые установлены в магнитопровод и могут быть выполнены цилиндрическими. Крепление магнитопровода к обечайке винта 4 ротора осуществляется крепежными винтами через стержни, запрессованные в магнитопровод, являющиеся одновременно штифтами, обеспечивающими прочность магнитопровода. В магнитопроводе выполнены отверстия, в которых установлены съемные намагниченные магнитные блоки 11 с постоянными магнитами марки не ниже N45SH. Магнитопровод ротора герметичен, по внешней поверхности магнитопровод защищен обечайкой из стали 12Х18Н10Т сваренной со щеками магнитопровода ротора усиковым швом. Цилиндрические обечайки в туннелях под магнитные блоки 11 развальцованы с уплотнением резиновым кольцом.
Механизм 7 изменения индукции магнитного поля (см. фиг. 1 и, более детально, фиг. 4) ротора выполнен с возможностью поворота магнитных блоков 11. Поворот магнитных блоков 11 может быть реализован при использовании привода 14, соединенного с магнитными блоками посредством зубчатого колеса 13, шестерни 12 или шарнирно соединенных тяг. В качестве привода 14 может использоваться:
- собственный момент электродвигателя;
- электросервопривод, установленный на роторе;
- гидравлический сервопривод, вмонтированный в конструкцию ротора.
Инверторный блок представляет собой размещенные в герметичных корпусах инверторы на базе IGBT транзисторов и драйверов системы управления.
Датчик положения ротора (ДПР) расположен в ступице винта 4 и представляет собой резольвер с синусно-косинусными обмотками на статоре и магнитопровод специального профиля, обеспечивающего минимальное количество гармоник в сигнале, установленный на роторе (в ступице винта). ДПР не имеет специально выделенной обмотки возбуждения, обмотки датчика соединены по мостовой схеме, с подачей возбуждения на одну из диагоналей моста и съемом полезного сигнала с другой диагонали.
Опорно-упорный подшипник 5 - подшипниковая опора скольжения, смазываемая морской водой. Эта опора находится в ступице винта 4 и представляет собой стальные втулки, запрессованные в ступицу винта. Ось опорно-упорного подшипника 5 закреплена на кормовой оконечности ПА. На оси установлены керамические или полимерные вкладыши опорно-упорного подшипника, обеспечивающие восприятие радиальной и осевой нагрузок с минимальным коэффициентом трения. Подача смазывающей воды происходит через отверстия в оси опорно-упорного подшипника 5 и через смазывающие канавки во вкладыше опорно-упорного подшипника.
Охлаждение двигателя производится с внешней поверхности статора 2 (и через рабочий зазор - ротора) набегающим потоком воды.
Движительный комплекс с кольцевым электродвигателем для подводных аппаратов большой автономности работает следующим образом.
Во время движения ПА в зависимости от обстановки требуется изменение режимов полного или экономического хода изменением тяги. Изменение тяги достигается за счет изменения мощности (частоты вращения) гребного винта. Гидродинамический упор воспринимается опорно-упорным подшипником, охлаждающимся и смазывающимся забортной водой.
При этом от источника постоянного тока, установленного в прочном корпусе ПА через два гермоввода по двум кабелям, подается питание на секции инверторного моста, которые питают секции обмоток статора, контролируя и выравнивая ток в группе катушек, расположенных в диаметрально противоположных секторах двигателя.
При уменьшении скорости хода ПА и потребляемой мощности более чем в сто раз от номинальной, для увеличения КПД двигателя включается в работу механизм изменения индукции магнитного поля ротора.
При этом подается питание на электродвигатель, ротор вращается, включается привод механизма изменения индукции магнитного поля ротора.
Привод механизма изменения индукции магнитного поля ротора воздействует на соединенные с ним магнитные блоки путем их поворота. Магнитные блоки под воздействием привода поворачиваются до заданного положения, которое определяет датчик положения ротора, настраивая оптимальное магнитное поле для увеличения КПД двигателя.
Движительный комплекс с кольцевым электродвигателем для подводных аппаратов большой автономности расширяет функциональные возможности ПА, обеспечивает большую дальность подводного хода за счет различных режимов его работы с высоким КПД. Исключает большое количество токовводов в прочный корпус подводного аппарата, тем самым упрощает конструкцию и увеличивает надежность аппарата. Так же решает проблему охлаждения инвертора и исключает установку дополнительных систем термостатирования в прочном корпусе аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫЙ МОДУЛЬ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2017 |
|
RU2670341C1 |
| ДВИЖИТЕЛЬНО-РУЛЕВАЯ КОЛОНКА | 2017 |
|
RU2670364C1 |
| Двигательная установка подводного аппарата | 2017 |
|
RU2699178C2 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА С ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2320516C1 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА СОЛОВЬЕВА | 2006 |
|
RU2326021C2 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА С ЭЛЕКТРОДВИГАТЕЛЯМИ | 2006 |
|
RU2327596C2 |
| ПРОПУЛЬСИВНАЯ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2673207C1 |
| ВЫСОКООБОРОТНЫЙ ПОДВОДНЫЙ ДВИЖИТЕЛЬ | 2024 |
|
RU2840470C1 |
| Комбинированный двигательно-движительный комплекс судна | 2015 |
|
RU2617310C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИЖИТЕЛЬ В ЖИДКИХ СРЕДАХ С ЭЛЕКТРИЧЕСКОЙ РЕДУКЦИЕЙ | 2009 |
|
RU2421373C2 |
Изобретение относится к судостроению, а именно к движительным устройствам. Движительный комплекс с кольцевым электродвигателем для подводных аппаратов большой автономности содержит насадку, которая крепится к кормовому обтекателю при помощи пилонов и спрямляющего аппарата. В насадке размещен статор синхронного многополюсного двигателя. Статор монолитный, залитый жестким компаундом с интегрированными в нем силовыми ключами инвертора. Статор имеет секционирование в продольном направлении на две идентичные не связанные общим магнитным потоком части. В движительном комплексе используется винт со ступицей, в которой установлен опорно-упорный подшипник. На наружной кольцевой части винта размещен ротор, собранный из съемных магнитных блоков. Достигается повышение КПД в режимах полного хода подводного аппарата. 4 ил.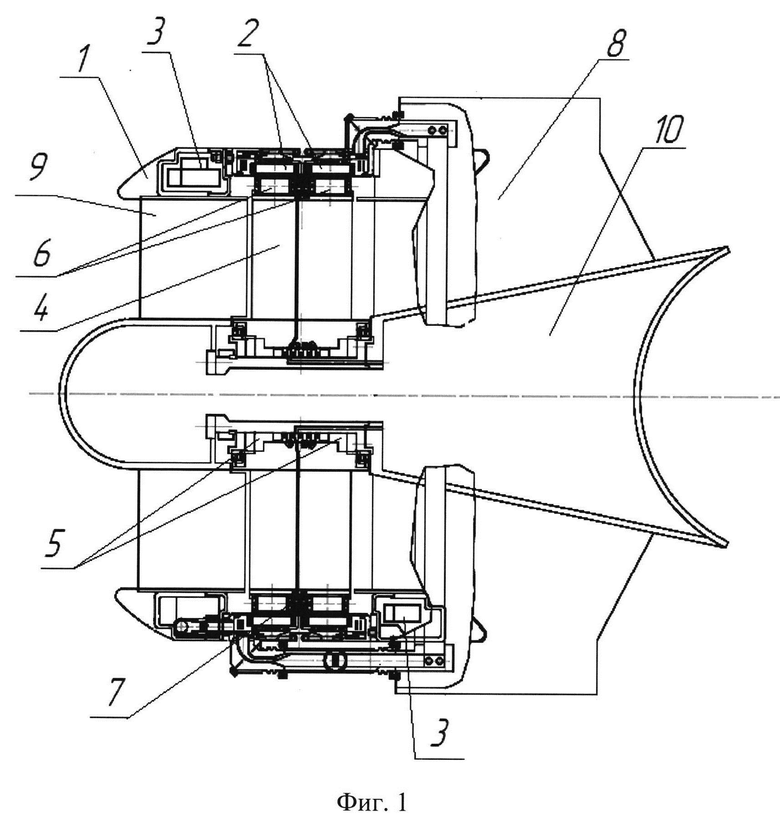
Движительный комплекс с кольцевым электродвигателем для подводных аппаратов большой автономности, содержащий насадку, которая крепится к кормовому обтекателю при помощи пилонов и спрямляющего аппарата, двухсекционный статор, винт со ступицей, в которой установлен опорно-упорный подшипник, двухсекционный ротор на постоянных магнитах, установленный на наружной кольцевой части винта, отличающийся тем, что в статор, залитый жестким компаундом, интегрированы силовые ключи инвертора; ротор снабжен механизмом изменения индукции магнитного поля ротора путем поворота магнитных блоков ротора.
| US 5252875 A1, 12.10.1993 | |||
| US 3708251 A1, 02.01.1973 | |||
| Комбинированный двигательно-движительный комплекс судна | 2015 |
|
RU2617310C2 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС СУДНА | 2013 |
|
RU2614745C2 |

