Изобретение относится к области водного транспорта и направлено на усовершенствование подводного аппарата, который обеспечивает передвижение в водной среде автономных средств, и может быть использовано как движитель автономных средств в надводном и подводном положениях.
Известен электропривод подводного аппарата [патент RU 2466057 С1, В63Н 21/17, опубликовано: 10.11.2012], содержащий обтекаемый водой герметичный корпус, в котором размещены источник питания и установленный через вибропоглощающие прокладки электродвигатель с двумя соосными выходными валами, которые за пределами герметичного корпуса аппарата непосредственно приводят во вращение винты встречного вращения, электродвигатель содержит два расположенных в корпусе неподвижных статора с многофазными обмотками и два вращающихся во встречных направлениях ротора.
Недостатками аналога являются невысокая надежность устройства, обусловленная применением выносных винтов, сложная система герметизации, а также значительные массогабаритные показатели электропривода за счет осевого размещения интегрированного блока.
Известно водометное устройство [патент RU 2492104 С2, В63Н 11/10, опубликовано: 10.09.2013], содержащее статор, в котором установлен ротор соосно с зазорной полостью, обеспечивающий вращение ротора водометного движителя. На внутренней поверхности ротора смонтированы гребные лопасти. Контрпропеллеры, патрубок камеры всасывания и сопло камеры нагнетания установлены на центральном валу. В зазорную полость введен пароподводящий патрубок. На наружной поверхности ротора в зазорной полости смонтированы рабочие лопатки паровой турбины. На внутренней поверхности статора в зазорной полости в порядке чередования с рабочими лопатками установлены спрямляющие лопатки паровой турбины. Центральный вал выполнен составным. Центральная часть вала установлена с возможностью вращения на опорах в неподвижных ступицах. Ступицы смонтированы в контрпропеллерах, несущих на себе патрубок камеры всасывания, сопло камеры нагнетания и статор. В начальной части ротора установлены лопасти центробежного насоса. В зазорном пространстве смонтирована оградительная шайба. В статоре выполнены выходные отверстия.
Недостатками аналога являются ограниченные функциональные возможности: отсутствие возможности регулирования параметров питания электродвигателя и, как следствие, отсутствие возможности влиять на шумовые и вибрационные характеристики электродвигателя.
Известна двигательно-движительная установка подводного аппарата [патент RU 2557291 C1, В63Н 21/00, опубликовано: 20.07.2015], содержащая высокоскоростной электродвигатель, редуктор, магнитная муфта установлена между электродвигателем и редуктором, при этом магнитопроницаемая перегородка магнитной муфты является герметизирующим уплотнительным элементом и разделяет внутреннее пространство установки на воздушную полость и полость, заполненную жидкостью, электродвигатель расположен в воздушной среде и соединен с ведущей магнитной полумуфтой, а ведомая магнитная полумуфта соединена с редуктором, который размещен в полости с жидкой средой и соединен с валом движителя.
Недостатком аналога являются его ограниченные функциональные возможности, связанные с отсутствием возможности регулирования числа оборотов гребного винта. Дополнительным недостатком устройства является сложность конструкции и низким КПД, и большим энергопотреблением.
Известен электроводомет [патент RU 2770259 C1, В63Н 11/08, опубликовано: 14.04.2022], содержащий статор, полый ротор, несущий на внутренней поверхности гребные лопасти и спрямляющие лопатки, причем гребные лопасти ротора снабжены на периферии магнитами, а спрямляющие лопатки установлены внутри корпуса и соединяют ось вращения обтекателя с корпусом, а электродвигатель встроен в систему охлаждения
Недостатками аналога являются низкая надежность, невысокие обороты ротора и низкий коэффициент полезного действия (КПД). При этом не предусмотрены конструктивные меры обеспечения глубоководного применения.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является электрический подводный водометный двигатель с несколькими статорами для морских транспортных средств [патент US 10988223B2, В63Н 21/17, В63Н 1/16, опубл. 27.04.2021], содержащий корпус, несколько осевых и радиальных статоров, рабочее колесо, состоящее из полого ротора с внутренними лопастями, расположенное соосно внутри осевых и радиальных статоров и установленное на гидродинамических и магнитных подшипниках, при этом корпус содержит гидравлическую систему рулевого управления, управляющего выходным соплом конической формы, спрямитель потока и множество диффузорных лопаток.
Недостатками ближайшего аналога являются сложность конструкции и трудоемкость технического обслуживания из-за наличия нескольких статоров, нескольких гидродинамических и магнитных подшипников; сниженный коэффициент полезного действия из-за увеличенных зазоров между статорами и полым ротором, что обусловлено применением гидродинамических подшипников; сниженная экологичность из-за наличия гидравлической системы рулевого управления.
Задачами настоящего изобретения являются повышение энергоэффективности и расширение функциональных возможностей для высокоскоростного перемещения плавучих объектов в жидкости с низким уровнем шума и вибраций.
Технический результат заключается в повышении надежности конструкции и коэффициента полезного действия, снижении массогабаритных показателей, а также увеличении тяговых характеристик подводного движителя.
Поставленная задача решается и указанный результат достигается тем, что подводный движитель, содержащий герметичный корпус, несколько радиальных статоров, рабочее колесо, состоящее из полого ротора с внутренними лопастями, расположенное соосно внутри радиальных статоров, выходное сопло, согласно изобретению радиальные статоры содержат многофазные зубцовые обмотки, на внешней поверхности полого ротора установлены индукторы с постоянными магнитами и высокооборотные керамические подшипники, а внутренняя поверхность полого ротора выполнена в виде конуса, на котором установлены импеллеры, блок силовой электроники установлен в герметичный корпус движителя, при этом между герметичным корпусом и внешней поверхностью полого ротора расположен герметизирующий узел с ферромагнитным уплотнителем, причем герметичный корпус содержит сферическую заслонку с возможностью управления выходным соплом.
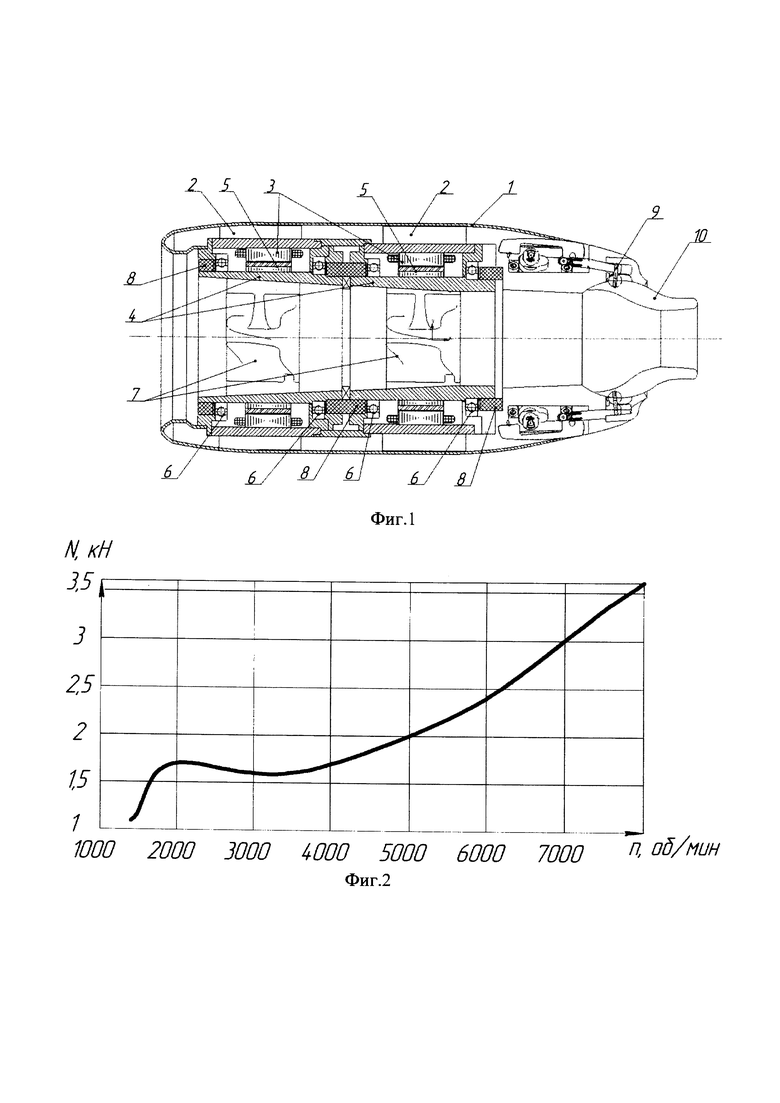
Существо изобретения поясняется чертежом. На фиг.1 изображен высокооборотный подводный движитель. На фиг.2 представлены результаты моделирования высокооборотного подводного движителя.
Высокооборотный подводный движитель (Фиг. 1) включает в себя герметичный корпус 1, в котором в воздушной среде размещены блок силовой электроники 2, два радиальных статора, содержащие многофазные обмотки 3, полый ротор 4 с установленными на его внешней поверхности двумя индукторами с постоянными магнитами 5, керамические подшипники 6, импеллеры 7, установленные на внутренней конической поверхности полого ротора 4, герметизирующий узел с ферромагнитным уплотнителем 8, установленный между герметичным корпусом 1 и внешней поверхностью полого ротора 4, сферическую заслонку 9, связанную с выходным соплом 10, обеспечивающую управление им, и установленную на герметичном корпусе 1.
Предложенное устройство работает следующим образом. Постоянное напряжение, подаваемое на вход блока силовой электроники 2 преобразуется в переменное напряжение на выходе из блока силовой электроники 2 и подается на радиальные статоры, содержащие многофазные обмотки 3, в которых за счет закона электромагнитной индукции создается вращающееся магнитное поле. Взаимодействие вращающегося магнитного поля радиальных статоров, содержащих многофазные обмотки 3 с индукторами с постоянными магнитами 5, обеспечивает создание вращающего момента, передаваемого на полый ротор 4 при помощи керамических подшипников 6, которые загерметизированны герметизирующим узлом с ферромагнитным уплотнителем 8.
Блок силовой электроники 2 коммутирует радиальные статоры, содержащие многофазные обмотки 3, в такой последовательности, при которой создаются встречно направленные вращающиеся магнитные поля, что обеспечивает встречное вращение индукторов с постоянными магнитами 5 полого ротора 4 и, соответственно, импеллеров 7, установленных на внутренней конической поверхности полого ротора 4. Это обеспечивает ускорение потока воды, проходящей через выходное сопло 10, управляемое сферической заслонкой 9.
Таким образом, требуемое движение обеспечивается наиболее эффективным способом для широкого диапазона скоростей посредством регулировки выходного сопла 10. Управление выходным соплом 10 обеспечивается сервоприводами (на фиг.1 не показаны) на подвижной опоре.
Таблица сопоставительного анализа заявленного изобретения с ближайшим аналогом (импортозамещаемая техника).
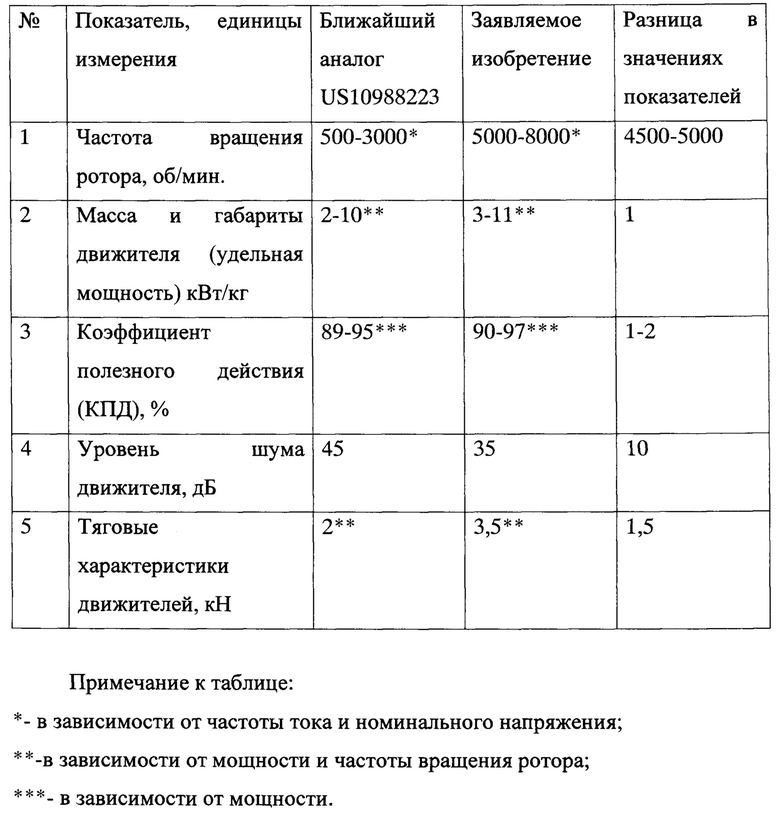
Выполненные расчеты и проведенные лабораторные испытания показали, что предложенный движитель обладает низким уровнем шума (до 35 дБ), позволяет увеличить коэффициент полезного действия на 1-2% (90-97% против 89-95%), массу и габариты электрической машины на 1 кВт/кг (3-11 против 2-10) и тяговые характеристик на 1,5 кН (3,5 против 2).
Помимо этого, при анализе полученных результатов моделирования (Фиг. 2), можно сделать вывод, что наиболее оптимальным режимом работы, заявляемого движителя с точки зрения его эффективности, является режим при скорости вращения ротора порядка 5000-8000 об/мин. В этом диапазоне зависимость показывает устойчивый рост.
Таким образом, предлагаемое конструктивное решение позволяет повысить надежность конструкции и коэффициент полезного действия, снизить массогабаритные показатели, а также увеличить тяговые характеристик подводного движителя, за счет упрощения конструкции подводного движителя, использования радиальных статоров, содержащих многофазные зубцовые обмотки и индукторов с постоянными магнитами в качестве привода.
Заявляемое изобретение также обеспечивает расширение функциональных возможностей подводного движителя, связанных с увеличением скорости потока воды и применения герметизирующих узлов с ферромагнитным уплотнителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический подводный движитель | 2017 |
|
RU2687397C2 |
| ВИНТОРУЛЕВАЯ КОЛОНКА С ЭЛЕКТРОДВИЖИТЕЛЕМ | 2024 |
|
RU2834489C1 |
| ЭЛЕКТРОВОДОМЕТ | 2021 |
|
RU2770259C1 |
| КОЛЬЦЕВОЙ СУДОВОЙ ДВИЖИТЕЛЬ | 2020 |
|
RU2741676C1 |
| ЭЛЕКТРОПРИВОД ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2466057C1 |
| Двигательная установка подводного аппарата | 2017 |
|
RU2699178C2 |
| Многофазный лопастной насос | 2021 |
|
RU2773263C1 |
| ВОДОМЕТНОЕ УСТРОЙСТВО | 2011 |
|
RU2492104C2 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |
| Синхронный электродвигатель для винта вертолета | 2019 |
|
RU2708382C1 |
Изобретение относится к области водного транспорта и направлено на усовершенствование подводного аппарата, который обеспечивает передвижение в водной среде автономных средств. Подводный движитель содержит герметичный корпус, несколько радиальных статоров, рабочее колесо, состоящее из полого ротора с внутренними лопастями, расположенное соосно внутри радиальных статоров, и выходное сопло. Радиальные статоры содержат многофазные зубцовые обмотки. На внешней поверхности полого ротора установлены индукторы с постоянными магнитами и высокооборотные керамические подшипники, а внутренняя поверхность полого ротора выполнена в виде конуса, на которой установлены импеллеры. Блок силовой электроники установлен в герметичный корпус движителя, при этом между герметичным корпусом и внешней поверхностью полого ротора расположен герметизирующий узел с ферромагнитным уплотнителем. Герметичный корпус содержит сферическую заслонку с возможностью управления выходным соплом. Достигается повышение надежности конструкции и коэффициента полезного действия, снижение массогабаритных показателей, а также увеличение тяговых характеристик подводного движителя. 2 ил., 1 табл.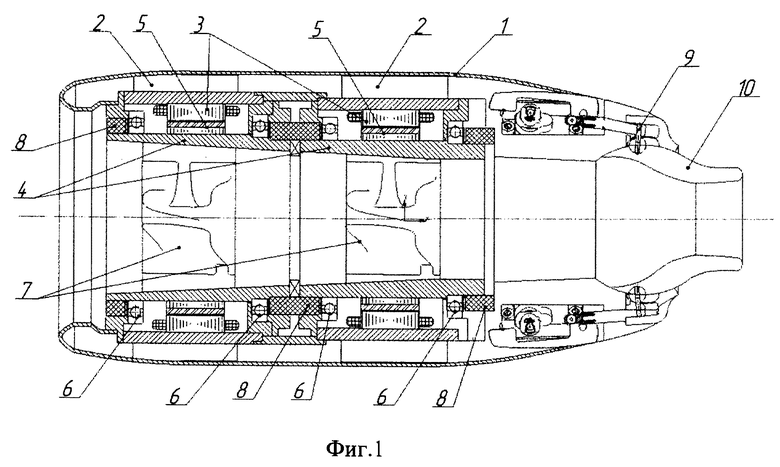
Подводный движитель, содержащий герметичный корпус, несколько радиальных статоров, рабочее колесо, состоящее из полого ротора с внутренними лопастями, расположенное соосно внутри радиальных статоров, и выходное сопло, отличающийся тем, что радиальные статоры содержат многофазные зубцовые обмотки, на внешней поверхности полого ротора установлены индукторы с постоянными магнитами и высокооборотные керамические подшипники, а внутренняя поверхность полого ротора выполнена в виде конуса, на которой установлены импеллеры, блок силовой электроники установлен в герметичный корпус движителя, при этом между герметичным корпусом и внешней поверхностью полого ротора расположен герметизирующий узел с ферромагнитным уплотнителем, причем герметичный корпус содержит сферическую заслонку с возможностью управления выходным соплом.
| RU 179428 U1, 15.05.2018 | |||
| US 10988223 B2, 27.04.2021 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИНТОВЫХ МИКРОПРУЖИН | 0 |
|
SU222322A1 |
| US 6692319 B2, 17.02.2004. | |||

