Изобретение относится к области подводного кораблестроения, в частности к пропульсивным электроэнергетическим установкам с гребными электродвигателями и может быть использовано в судостроении.
Известна судовая система электродвижения с двухвинтовым двигательно-движительным модулем кольцевой конструкции (патент на изобретение №2522733, опубликован 11.12.2012), принятая как аналог. Система состоит из двух движителей кольцевой конструкции на базе синхронных электрических машин с возбуждением от постоянных магнитов, с соосно установленными роторами, в полостях которых установлены гребные винты с противонаправленным разворотом лопастей, а скорости разнонаправленного вращения задаются и контролируются раздельно.
К недостаткам данного аналога относятся:
- конструкция не позволяет размещать в кормовой оконечности оборудование, позволяющее повысить боевую эффективность подводной лодки и ее защиту, а также буксируемые гидроакустические средства наблюдения и контроля за подводной обстановкой;
- рулевые устройства, при подобной конструкции, возможно разместить только перед движителем, что потребует необходимости увеличения площади пера руля для обеспечения требуемой управляемости подводной лодки;
- ограничение по диаметру винта корпусом двигательно-движительной системы кольцевой конструкции, что не позволяет уменьшить частоту оборотов винта за счет увеличения суммарной площади его лопастей для улучшения виброакустических характеристик установки. При подобной конструкции, решить данную проблему можно только увеличением габаритов двигательно-движительной системы, что сделает устройство чрезмерно громоздким, ухудшая гидродинамические характеристики аппарата.
Известна установка в составе кормовой оконечности подводной лодки (патент на изобретение №2166456, опубликован 10.05.2001), принятая за прототип, содержащая прочный и легкий корпус, подвижно установленный гребной винт, для чего в легком корпусе сделан разрыв. Гребной винт установлен подвижно на прочном корпусе, на опорном подшипнике.
Передача крутящего момента от гребного электродвигателя к винту производится через коническую зубчатую передачу (первое коническое колесо неподвижно закреплено на ступице гребного винта, ответная часть закреплена на гребном вале гребного электродвигателя). Гребной вал выходит из прочного корпуса через дейдвуд с уплотнением, препятствующим проникновению воды в прочный корпус, при обеспечении равномерного вращения вала.
К недостаткам данного прототипа, относятся:
- чрезмерная сложность конструкции (наличие зубчатой передачи), что приводит к ухудшению надежности устройства, уменьшению КПД, ухудшению виброакустических характеристик и как следствие, к увеличению уровня подводного шума (первичного акустического поля), усложнению технологию изготовления, монтажа и обслуживания оборудования, делая устройство нетехнологичным;
- необходимость герметизации прочного корпуса при помощи дейдвудного уплотнения, что ухудшает надежность устройства, требует дополнительного обслуживания, при вращении вала возникает дополнительная сила трения, действующая на вал;
- необходимость наличия системы смазки зубчатой передачи и других трущихся поверхностей элементов главного силового контура;
Задача, решаемая изобретением - улучшить виброакустические характеристики двигательно-движительной системы, повысить пропульсивный КПД, обеспечить возможность размещать в кормовой части подводной лодки, подводного технического средства или необитаемого подводного аппарата (далее - аппарат), оборудование, повышающее ее боевую эффективность и защиту со стороны кормы, в том числе буксируемые гидроакустические средства наблюдения и контроля за подводной обстановкой, а также уменьшить стоимость производства и монтажа.
Поставленная задача решается за счет того, что двигательно-движительный модуль обращенной кольцевой конструкции содержит обтекатель являющийся элементом легкого корпуса формирующего кормовую оконечность аппарата, многолопастной гребной винт со ступицей большого диаметра, гребной электродвигатель, опорный и упорный подшипники. Устройство выполнено в виде модуля, размещенного вне прочного корпуса кормовой оконечности подводного аппарата, в конструкцию кормовой оконечности - двигательно-движительного модуля обращенной кольцевой конструкции введен второй гребной электродвигатель и гребной винт, в качестве гребных электродвигателей применены две кольцевые синхронные электрические машины обращенного типа с возбуждением от постоянных магнитов, где ротор каждой из гребных кольцевых синхронных электрических машин конструктивно объединен с многолопастным гребным винтом со ступицей большого диаметра; гребные винты подвижно соединены с опорной конструкцией и статором через опорный и упорный подшипники и вращаются во взаимно противоположных направлениях, лопасти каждого из гребных винтов противоположно направлены.
Двигательно-движительный модуль кольцевой конструкции закрепляется на кормовой оконечности аппарата, применяются две гребные кольцевые синхронные электрические машины обращенного типа с возбуждением от постоянных магнитов, размещенных последовательно на одной оси, роторы гребных кольцевых синхронных машин конструктивно совмещаются со своими гребными винтами, вращающимися в противоположных направлениях, при раздельном управлении двух гребных кольцевых синхронных электрических машин обращенного типа с возбуждением от постоянных магнитов (далее - электродвигатель) по критерию наименьшего уровня шума или наибольшего упора.
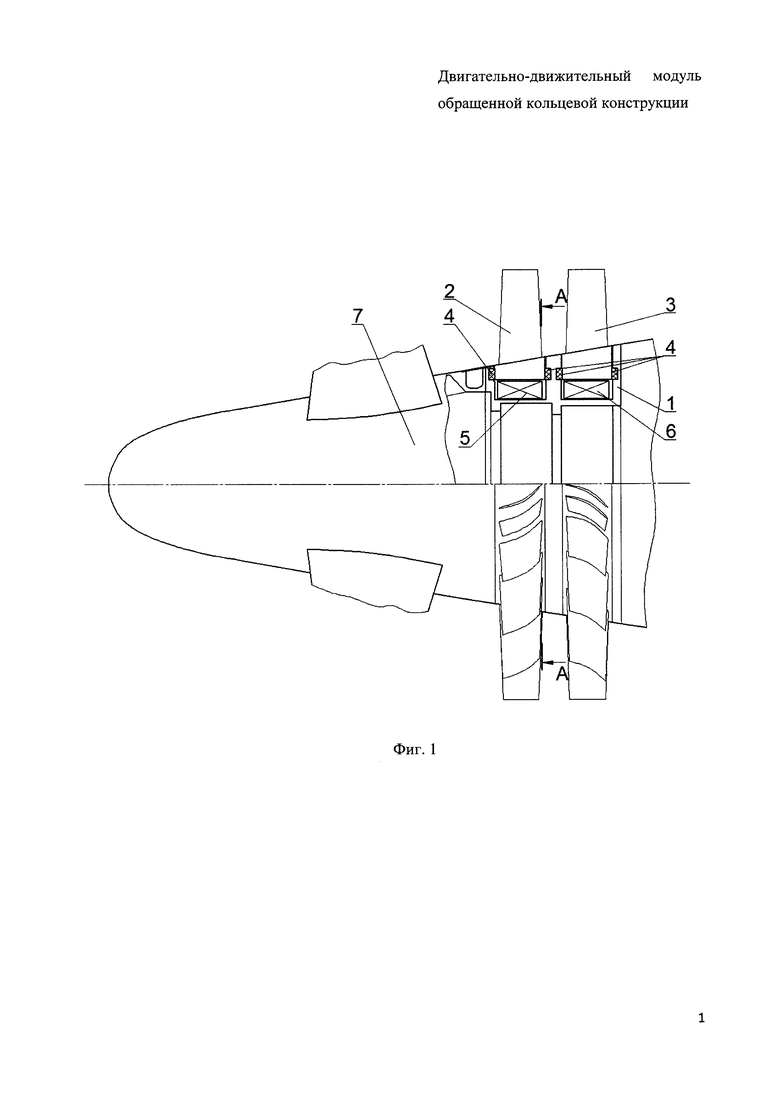
На фиг. 1 представлена схема двигательно-движительного модуля обращенной кольцевой конструкции, содержащего: опорное устройство 1, гребные винты 2 и 3 совмещенные с роторами электродвигателей, упорный подшипник 4 кольцевой формы, статоры 5 и 6, обтекатель 7.
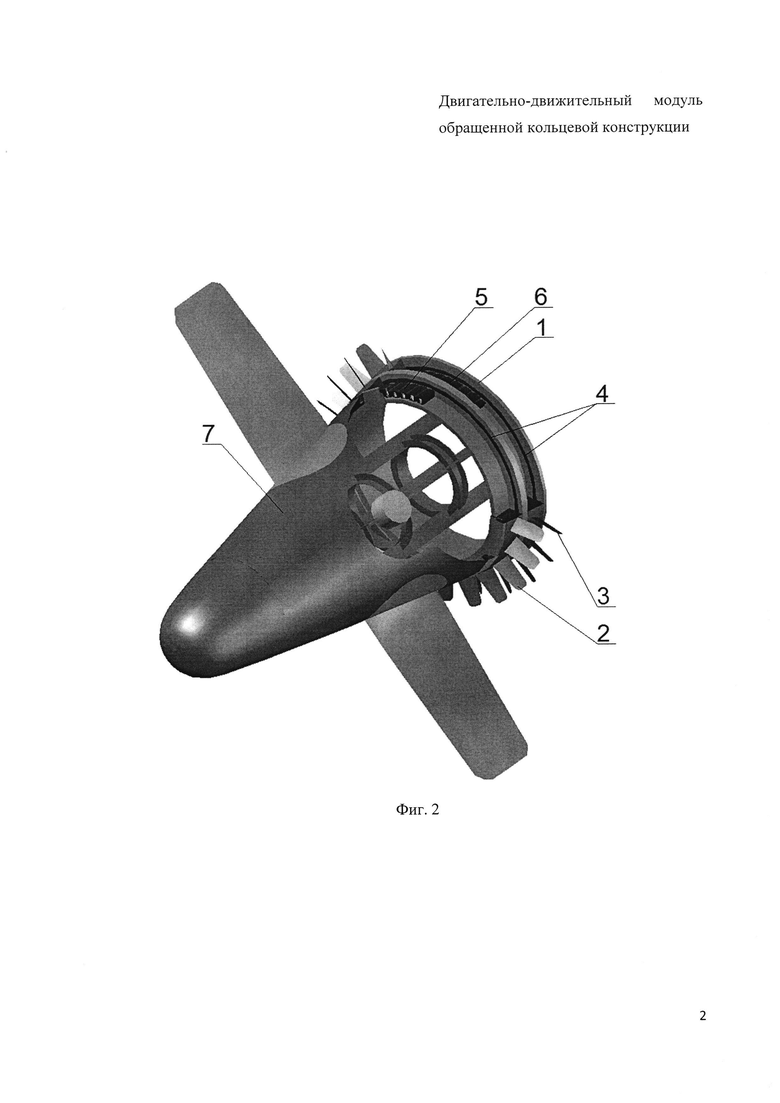
На фиг. 2 представлено трехмерное отображение кормовой оконечности - двигательно-движительного модуля обращенной кольцевой конструкции.
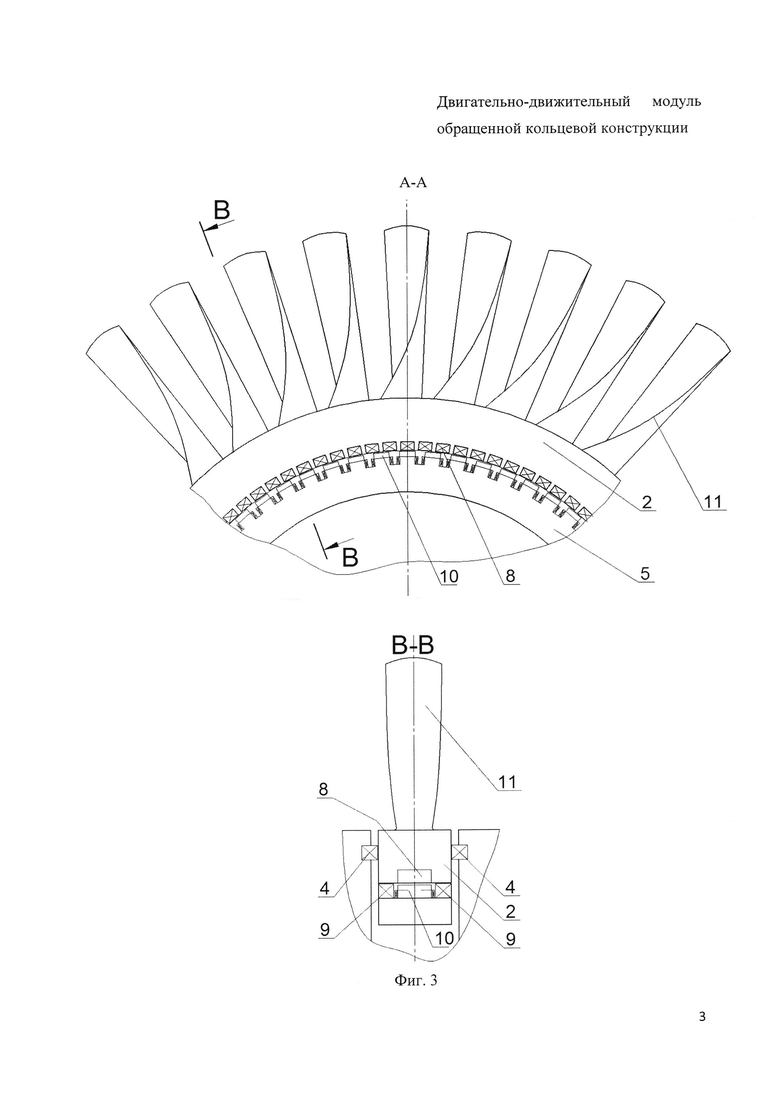
На фиг. 3 представлено сечение А-А Фиг. 1 электродвигателя, содержащем: гребной винт 2 конструктивно совмещенный с ротором электродвигателя, статор 5, постоянные магниты 8, опорный подшипник 9, полюсы с фазными обмотками 10, лопасти гребного винта 11. Конструкция второго электродвигателя аналогична конструкции вышеуказанного (фиг. 3).
Электродвигатели выполнены в виде двух кольцевых синхронных электрических машин обращенного типа с возбуждением от постоянных магнитов (фиг. 1) расположенных на одной оси, состоящих из статоров 5 и 6 с фазными обмотками 10, гребные винты 2 и 3 выполнены единой сборочной единицей с роторами электродвигателей; модуль содержит два гребных винта 2 и 3 вращающихся в противоположных направлениях. Гребной винт 2 и 3 выполнен со ступицей большого диаметра, совпадающего с диаметром и контуром образующей линии корпуса аппарата, лопасти 11 гребных винтов 2 и 3 противоположно направлены, гребные винты 2 и 3 соединены с роторами своих электродвигателей, причем каждый ротор объединен со ступицей гребного винта 2 или 3. Каждый гребной винт 2 и 3, установлен подвижно, опираясь на опорные подшипники 10 (фиг. 3), расположенные на внешней поверхности статоров 5 и 6 электродвигателей.
Описание двигательно-движительного модуля обращенной кольцевой конструкции в динамическом состоянии: при вращении гребных винтов 2 и 3, вращающихся в противоположных направлениях, создаваемый гребными винтами 2 и 3 упор, передается на упорный подшипник 4 кольцевой формы, расположенный симметрично относительно винта, на кормовой и носовой части опорной конструкции 1 (фиг. 1). Взаимное расположение гребных винтов 2 и 3 на одной оси - параллельное, при вращении во взаимно противоположных направлениях, развороте лопастей 11 каждого гребного винта 2 и 3 в противоположных направлениях относительно лопастей соседнего винта, позволяет спрямлять поток жидкости, проходящий через проточную часть винта. Количество лопастей 11 на каждом гребном винте 2 и 3 значительно превышает количество лопастей классического гребного винта, что дает возможность сократить высоту лопастей 11, уменьшить кавитацию, значительно понизив частоту вращения гребных винтов 2 и 3, при сохранении требуемого упора. Форма лопастей должна обеспечить упор в горизонтальном направлении и равномерное, безотрывное обтекание жидкостью обтекателя 7, минимизируя влияние явления подсоса кормовой оконечностью аппарата.
Опорные подшипники 9 и упорные подшипники 4 выполнены из антифрикционного материала, смазка и охлаждение которых обеспечивается при вращении винтов 2 и 3 самопротоком через них окружающей воды. На кормовой, торцевой части устройства закрепляется обтекатель 7, формирующий кормовую оконечность аппарата и обеспечивающий, во время работы устройства, равномерное обтекание жидкостью корпуса аппарата, уменьшая естественный подсос жидкости корпусом аппарата.
Технический результат реализации изобретения заключается в уменьшении уровня подводного шума аппарата, от работы движителя и механизмов СЭУ, уменьшении стоимости СЭУ и возможности размещения в кормовой части аппарата, оборудования, позволяющего повысить боевую эффективность и защиту аппарата, а так же возможности размещения буксируемых гидроакустических средств наблюдения и контроля за подводной обстановкой.
В данном техническом решении, за счет исключения из конструкции устройства зубчатой передачи, гребного вала и дейдвудного устройства, достигается повышение структурной надежности, а вынос модуля из прочного корпуса обеспечивает возможность размещения дополнительного оборудования, вооружения и улучшает условия обитаемости корабля. Многолопастная конструкция винта с увеличенным, по сравнению с гребным винтом традиционной конструкции, диаметром ступицы и уменьшенной высотой лопастей, исходя из расчета требуемого упора, позволяет значительно уменьшить частоту вращения гребных винтов и кавитацию лопастей.
Наличие двух, расположенных на одной оси - параллельно, гребных винтов с противонаправленным разворотом лопастей, вращающихся в противоположных направлениях, позволит повысить пропульсивный КПД, надежность пропульсивной системы, получать максимальную мощность за счет суммирования мощностей двух отдельных электроприводов, а так же взаимно компенсировать собственные виброакустические составляющие при определенных соотношениях в диапазоне частот вращения, при раздельном управлении двумя электродвигателями обращенного типа с возбуждением от постоянных магнитов по критерию наименьшего уровня шума или наибольшего упора. Так же отсутствие гребного вала, зубчатой передачи, дейдвудного уплотнения, отсутствие создаваемых этими механизмами шумов и снижение частот вращения винтов позволит существенно улучшить виброакустические характеристики двигательно-движительной системы, и пропульсивного комплекса в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПУЛЬСИВНАЯ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2673207C1 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА СОЛОВЬЕВА | 2006 |
|
RU2326021C2 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА С ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2320516C1 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА С ЭЛЕКТРОДВИГАТЕЛЯМИ | 2006 |
|
RU2327596C2 |
| Движительный комплекс с кольцевым электродвигателем для подводных аппаратов большой автономности | 2019 |
|
RU2722873C1 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА С ПОГРУЖНЫМ ЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2006 |
|
RU2323123C1 |
| КОРМОВАЯ ОКОНЕЧНОСТЬ ПОДВОДНОЙ ЛОДКИ | 2000 |
|
RU2166456C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2222469C1 |
| Движительный комплекс подводного объекта | 2023 |
|
RU2827383C1 |
| Движительный комплекс объекта в водной среде | 2024 |
|
RU2840558C1 |
Изобретение относится к области подводного кораблестроения, в частности к пропульсивным электроэнергетическим установкам с гребными электродвигателями, и может быть использовано в судостроении. Двигательно-движительный модуль кольцевой конструкции содержит обтекатель, являющийся элементом легкого корпуса формирующего кормовую оконечность аппарата, многолопастной гребной винт со ступицей большого диаметра, гребной электродвигатель, опорный и упорный подшипники. Устройство выполнено в виде модуля, размещенного вне прочного корпуса кормовой оконечности подводного аппарата, в конструкцию кормовой оконечности - двигательно-движительного модуля обращенной кольцевой конструкции введен второй гребной электродвигатель и гребной винт. В качестве гребных электродвигателей применены две кольцевые синхронные электрические машины обращенного типа с возбуждением от постоянных магнитов, где ротор каждой из гребных кольцевых синхронных электрических машин конструктивно объединен с многолопастным гребным винтом со ступицей большого диаметра. Гребные винты подвижно соединены с опорной конструкцией и статором через опорный и упорный подшипники и вращаются во взаимно противоположных направлениях, лопасти каждого из гребных винтов противоположно направлены. Достигается уменьшение уровня подводного шума аппарата, повышение пропульсивного КПД и возможность размещения буксируемых гидроакустических средств наблюдения и контроля за подводной обстановкой. 3 ил.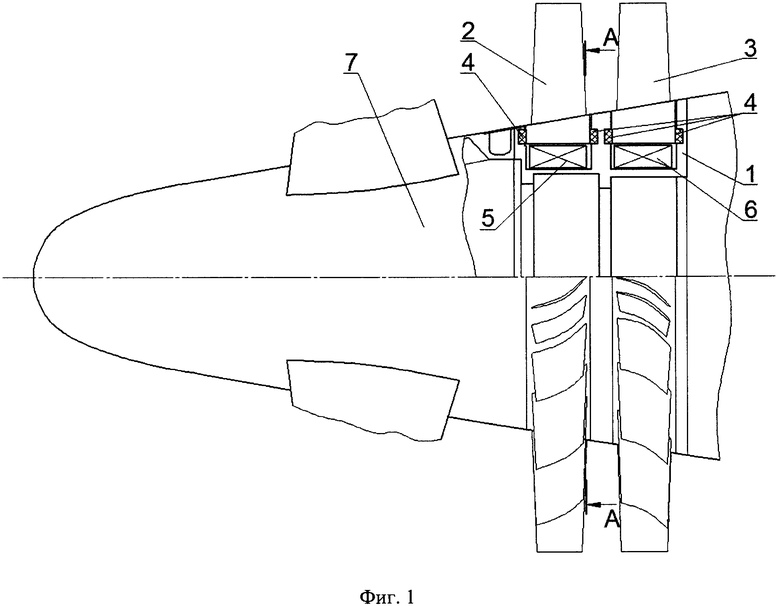
Двигательно-движительный модуль кольцевой конструкции содержит обтекатель, являющийся элементом легкого корпуса формирующего кормовую оконечность аппарата, многолопастной гребной винт со ступицей большого диаметра, гребной электродвигатель, опорный и упорный подшипники, отличающийся тем, что устройство выполнено в виде модуля, размещенного вне прочного корпуса кормовой оконечности подводного аппарата, в конструкцию кормовой оконечности - двигательно-движительного модуля обращенной кольцевой конструкции введен второй гребной электродвигатель и гребной винт, в качестве гребных электродвигателей применены две кольцевые синхронные электрические машины обращенного типа с возбуждением от постоянных магнитов, где ротор каждой из гребных кольцевых синхронных электрических машин конструктивно объединен с многолопастным гребным винтом со ступицей большого диаметра, гребные винты подвижно соединены с опорной конструкцией и статором через опорный и упорный подшипники и вращаются во взаимно противоположных направлениях, лопасти каждого из гребных винтов противоположно направлены.
| КОРМОВАЯ ОКОНЕЧНОСТЬ ПОДВОДНОЙ ЛОДКИ | 2000 |
|
RU2166456C1 |
| US 4648345 A, 10.03.1987 | |||
| СУДОВАЯ СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ С ДВУХВИНТОВЫМ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫМ МОДУЛЕМ С ДВИГАТЕЛЯМИ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2012 |
|
RU2522733C1 |

