Изобретение относится к приводам конвейеров с прерывистым движением тягового органа и может быть использовано для одностороннего перемещения грузов с периодическими остановками.
Известен привод конвейера дискретного действия (Авторское свидетельство СССР №850522, кл. B65G 23/28), который состоит из ведущего вала, кинематически связанного с приводной звездочкой через зубчатые колеса и преобразователь движения с кривошипами и подвижными звеньями, при этом преобразователь движения выполнен в виде двух ведущих и одного ведомого кривошипа с совпадающими осями и трех подвижных звеньев, одно из которых имеет форму треугольника.
Недостатком такой конструкции является ее сложность и большое количество подвижных элементов, что снижает надежность привода, а применение рычажных механизмов приводит к увеличению габаритов корпуса.
Известен конвейер с прерывистым движением тягового органа (Патент РФ на изобретение №2416560), который содержит бесконечную цепь, включающую множество шарнирно связанных друг с другом прямоугольных звеньев с продольными и поперечными элементами, стол, расположенный под верхней ветвью цепи, пневмоцилиндр, расположенный параллельно плоскости стола, и захват, шарнирно установленный на конце штока пневмоцилиндра. Блок управления пневмоцилиндром выполнен с возможностью циклической подачи сжатого воздуха в пневмоцилиндр. Захват выполнен с возможностью возвратно-поступательного движения по поверхности стола и захватывания при этом поперечных элементов цепи только при движении в одном направлении.
Прерывистое движение в рассмотренном механизме обеспечивается за счет разрыва кинематической цепи на время остановки и ее замыкания на время движения, что приводит к соударениям звеньев, повышенному износу и шуму при работе конвейера.
Известен конвейер с прерывистым движением тягового органа (Патент РФ на изобретение №2108278), который включает вал с установленными на нем звездочками, жестко смонтированное на валу червячное колесо, приводной вал с установленным на нем червяком и кинематически связанный с приводным валом червяка механизм изменения скорости движения тягового органа. Червяк установлен на приводном валу с возможностью продольного перемещения вдоль его оси посредством шлицевого соединения. Механизм изменения скорости движения тягового органа выполнен в виде кулачка с замкнутым фигурным пазом и шарнирно смонтированного коромысла с установленным на нем с возможностью размещения в замкнутом пазу кулачка роликом. Коромысло соединено с червяком посредством установленной на последнем с возможностью поворота вокруг его оси и фиксации в продольном направлении втулки и шарнирно связанных с ней и коромыслом шатунов.
Недостатками указанного конвейера являются большие габариты и сложность механизма преобразования вращательного движения в прерывистое, которая приводит к снижению надежности привода конвейера. К тому же, трение в поступательной кинематической паре, выполненной в виде шлицевого соединения, приводит к значительному снижению КПД механизма.
Известен механизм с остановками выходного звена (Prikhodko А.А., Smelyagin A.I., Tsybin A.D. Kinematics of planetary mechanisms with intermittent motion // Procedia Engineering. - 2017. - T. 206. - C. 380-385), который может быть применен в качестве привода конвейера, являющийся прототипом предлагаемого изобретения и содержащий корпус, входной вал, водило, центральное цилиндрическое неподвижное зубчатое колесо, сателлит, состоящий из цилиндрического зубчатого колеса, вала и эллиптического зубчатого колеса, и выходной вал с закрепленным на нем эллиптическим зубчатым колесом. При этом в рассматриваемом механизме оси вращения эллиптических зубчатых колес проходят через фокусы делительного эллипса.
Недостатком такой конструкции является сложность в уравновешивании, так как центры масс эллиптических колес лежат не на осях их вращения. Также, передача эллиптическими зубчатыми колесами с осями вращения в фокусах делительного эллипса обладает следующим недостатком: при увеличении эксцентриситетов эллиптических зубчатых колес увеличиваются габариты передачи и одновременно снижается их нагрузочная способность.
Таким образом, задачей изобретения является создание привода конвейера дискретного действия, более простого в уравновешивании и имеющего малые габариты.
Техническим результатом является компактность устройства при сохранении возможности передачи больших усилий, значительный ожидаемый ресурс работы, упрощение динамической балансировки.
Технический результат достигается тем, что привод конвейера дискретного действия содержит двигатель, преобразователь непрерывного вращательного движения в дискретное, ведущий и ведомый шкивы, конвейерную ленту, при этом преобразователь движения включает в себя корпус, в котором соосно установлены входной и выходной валы, центральное неподвижное зубчатое колесо, жестко закрепленное на корпусе соосно входному валу, сателлит, состоящий из цилиндрического зубчатого колеса и эллиптического зубчатого колеса сателлита, расположенных на валу сателлита, водило, установленное на входном валу и соединенное через вращательную кинематическую пару с валом сателлита, эллиптическое зубчатое колесо, закрепленное на выходном валу, при этом эллиптические зубчатые колеса имеют одинаковые размеры и установлены на валах таким образом, что ось вращения каждого вала проходит через центр делительного эллипса эллиптического зубчатого колеса, кроме того, центральное неподвижное зубчатое колесо радиусом r1=а состоит в зацеплении с цилиндрическим зубчатым колесом сателлита радиусом r2=b, где а и b - большая и малая полуоси эллиптических колес.
Технический результат достигается за счет использования передачи эллиптическими зубчатыми колесами с осями вращения в центре делительного эллипса. Данный вид передачи является более компактным при сохранении возможности передачи больших усилий, имеет значительный ожидаемый ресурс работы, более прост в уравновешивании по сравнению с передачей эллиптическими колесами с осями вращения в фокусе делительного эллипса.
На фиг. 1 показана схема привода конвейера дискретного действия, на фиг. 2 показана структурная схема преобразователя непрерывного вращательного движения в дискретное, на фиг. 3 показан вид А без корпуса, на фиг. 4 показан вид Б без корпуса.
Привод конвейера дискретного действия состоит из двигателя 1, ведущего шкива 2 и ведомого шкива 3, конвейерной ленты 4, преобразователя непрерывного вращательного движения в дискретное, находящегося в отдельном корпусе 5, в котором соосно установлены входной 6 и выходной 7 валы, центрального неподвижного зубчатого колеса 8, жестко закрепленного на корпусе соосно входному валу 6, сателлита, состоящего из цилиндрического зубчатого колеса 10 и эллиптического зубчатого колеса 11, расположенных на валу сателлита 12, водила 13, установленного на входном валу 6 и соединенного через вращательную кинематическую пару с валом сателлита 12, эллиптического зубчатого колеса 9, закрепленного на выходном валу 7. Эллиптические зубчатые колеса 9 и 11 имеют одинаковые размеры и установлены на валах таким образом, что ось вращения каждого вала проходит через центр делительного эллипса эллиптического зубчатого колеса. Центральное неподвижное зубчатое колесо 8 имеет радиус r1=а и состоит в зацеплении с цилиндрическим зубчатым колесом сателлита 10, которое имеет радиус r2=b.
Конвейер работает следующим образом.
Двигатель 1 сообщает входному валу 6 вращательное движение, которое передается водилу 13, благодаря чему цилиндрическое зубчатое колесо 10 обкатывается вокруг неподвижного зубчатого колеса 8. Вращательное движение цилиндрического колеса 10 передается валу сателлита 12 и эллиптическому зубчатому колесу 11, которое приводит в движение эллиптическое зубчатое колесо 9 и соответственно выходной вал 7. В момент времени, когда передаточное отношение пары эллиптических колес равно передаточному отношению пары цилиндрических колес, выходной вал 7 останавливается. Далее, скорость выходного вала увеличивается до максимального значения, затем опять уменьшается до нуля, что приводит к прерывистому движению выходного вала. Данное движение передается на ведущий шкив 2, который приводит в движение конвейерную ленту 4 и ведомый шкив 3. Так как выходной вал преобразователя движения совершает вращение с остановками, то груз на конвейерной ленте будет двигаться поступательно с остановками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатый механизм с прерывистым движением выходного звена | 2019 |
|
RU2724005C1 |
| Зубчатый механизм преобразования вращательного движения в неравномерное | 2020 |
|
RU2755829C1 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2500938C1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
| Перемешивающее устройство с прерывистым движением рабочего органа | 2019 |
|
RU2727955C1 |
| Перемешивающее устройство с неравномерным движением рабочего органа | 2020 |
|
RU2779980C2 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616656C1 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616655C1 |

Изобретение относится к приводам конвейеров. Привод конвейера дискретного действия содержит двигатель, преобразователь непрерывного вращательного движения в дискретное, ведущий и ведомый шкивы, конвейерную ленту, при этом преобразователь движения включает в себя корпус, в котором соосно установлены входной и выходной валы, центральное неподвижное зубчатое колесо, жестко закрепленное на корпусе соосно входному валу, сателлит, состоящий из цилиндрического зубчатого колеса и эллиптического зубчатого колеса сателлита, расположенных на валу сателлита, водило, установленное на входном валу и соединенное через вращательную кинематическую пару с валом сателлита, эллиптическое зубчатое колесо, закрепленное на выходном валу. Эллиптические зубчатые колеса имеют одинаковые размеры и установлены на валах таким образом, что ось вращения каждого вала проходит через центр делительного эллипса эллиптического зубчатого колеса, кроме того, центральное неподвижное зубчатое колесо радиусом r1=а состоит в зацеплении с цилиндрическим зубчатым колесом сателлита радиусом r2=b, где а и b - большая и малая полуоси эллиптических колес. Обеспечивается более компактная конструкция при сохранении возможности передачи больших усилий. 4 ил.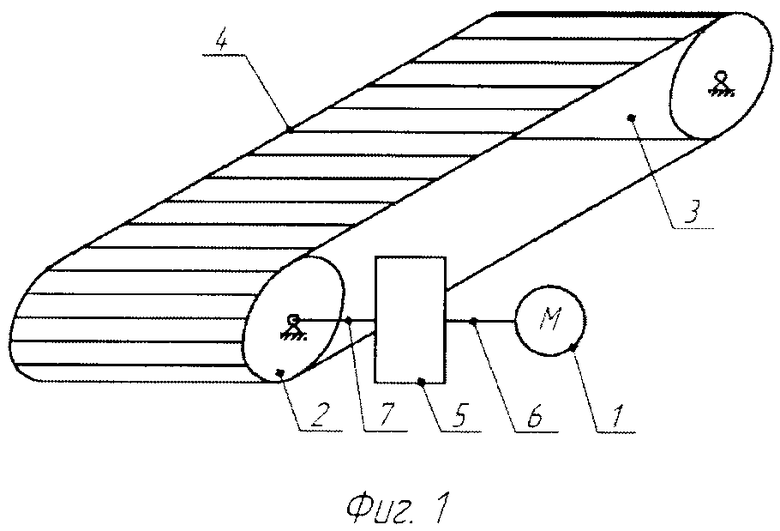
Привод конвейера дискретного действия, включающий преобразователь непрерывного вращательного движения в дискретное, содержащий корпус, входной и выходной валы, центральное неподвижное зубчатое колесо, жестко закрепленное на корпусе соосно входному валу, сателлит, состоящий из цилиндрического зубчатого колеса и эллиптического зубчатого колеса, расположенных на валу сателлита, водило, установленное на входном валу и соединенное через вращательную кинематическую пару с валом сателлита, эллиптическое зубчатое колесо, закрепленное на выходном валу, отличающийся тем, что эллиптические зубчатые колеса имеют одинаковые размеры и установлены на валах таким образом, что ось вращения каждого вала проходит через центр делительного эллипса эллиптического зубчатого колеса, кроме того, центральное неподвижное зубчатое колесо имеет радиус r1=а и состоит в зацеплении с цилиндрическим зубчатым колесом сателлита радиуса r2=b, при этом входной вал преобразователя движения соединен с двигателем, а на выходном валу расположен ведущий шкив, движение которого передается на ленту и ведомый шкив.
| Привод конвейера | 1984 |
|
SU1186559A1 |
| КОНВЕЙЕР С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ТЯГОВОГО ОРГАНА | 2009 |
|
RU2416560C1 |
| JP 2015101455 A, 04.06.2015 | |||
| JP 58082804 A, 18.05.1983. | |||

