Изобретение относится к области авиации, а именно к устройствам, полет которых осуществляется с помощью машущих движений крыльев, и может быть использовано в спортивных и развлекательных целях.
Известен летательный аппарат (Патент № RU 2138424 C1, кл. B64C 33/02), содержащий остов с шарнирно установленными крыльями, включающими нежесткую обшивку и латы, консольно закрепленные на лонжероне, соединенном с гибкой тягой, установленной на натяжных роликах с обеспечением возможности поворота лонжерона в вертикальной плоскости. Летательный аппарат снабжен пневмосистемой, состоящей из пневмоцилиндра с поршнем, баллона со сжатым газом, соединенного магистралями с обеими камерами пневмоцилиндра, и закрепленным на гибкой тяге блоком управления давлением в камерах пневмоцилиндра, соединенным с рычагом ручного управления крыльями, шток поршня связан с гибкой тягой, соединенной в кольцо, натяжные ролики установлены на остове по обе стороны от места соединения штока с гибкой тягой, крыло выполнено по форме треугольника, а латы выполнены из гибкого материала, причем жесткость каждой латы, расположенной дальше от остова, меньше жесткости предыдущей.
Недостатком известного устройства является низкая энергоэффективность вследствие применения пневматической силовой установки.
Известен орнитоптер (Патент № RU 2270136 C2, кл. B64C 33/00), содержащий корпус с шарнирно установленными крыльями, силовую установку, состоящую из энергоблока и привода машущих движений крыла, а также блок управления приводом машущих движений крыла, отличающийся тем, что привод машущих движений крыла состоит из жестко прикрепленного к корпусу гидроцилиндра с поршнем и штоком и двух штанг, одни концы которых шарнирно соединены со штоком гидроцилиндра, а другие концы шарнирно соединены каждая с основанием соответствующего крыла, при этом энергоблок силовой установки состоит из гидронасоса и двигателя, подключенного так, чтобы обеспечивать вращательное движение гидронасоса, причем гидронасос соединен подающим и обратным трубопроводами с блоком управления, который реверсивными трубопроводами соединен с двумя полостями гидроцилиндра.
Недостатком данного устройства является то, что конструкция такого орнитоптера довольно громоздка, частота взмахов крыльев невысока, что снижает аэродинамические характеристики данного орнитоптера и существенно снижает функциональные возможности устройства.
Известен махолет (Патент № RU 2412084 C2, кл. B64C 39/02), содержащий корпус и машущие крылья, имеющий два вала, встречно вращающихся в корпусе, с установленными под углом кривошипами, описывающими при вращении коническую траекторию и соединенными с машущими крыльями с возможностью вращения относительно них, при этом выполняющие основной продольный мах во фронтальной плоскости, поперечный поворот относительно передней кромки и сдвиг по горизонтальной окружности, машущие крылья содержат устройство, ограничивающее сдвиг по горизонтальной окружности.
Недостатком указанного устройства является исполнение привода в виде рычажного механизма, который имеет большие габариты.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является орнитоптер (патент на полезную модель № RU 180516 U1, кл. B64C 33/02), содержащий корпус с шарнирно установленными крыльями, привод машущих движений крыла, а также блок управления приводом машущих движений крыла, отличающийся тем, что в привод машущих движений крыла входит кулисный механизм с поступательно движущейся кулисой, причем кулиса шарнирно соединена со штангами, шарнирно соединенными с основанием соответствующего крыла, а кривошип кинематически связан с электродвигателем, установленным неподвижно на корпусе.
Недостатками прототипа являются большие габариты вследствие использования рычажного механизма, а также его неуравновешенность.
Технической задачей заявляемого изобретения является создание орнитоптера, характеризующегося более высокими эксплуатационными характеристиками.
Техническим результатом является высокая уравновешенность исполнительного механизма орнитоптера, а также уменьшение его габаритных размеров.
Технический результат достигается орнитоптером, включающим корпус с шарнирно установленными крыльями и электродвигатель, неподвижно закрепленный на корпусе. При этом в корпусе установлены соосные входной и выходной валы, входной вал жестко соединен с валом электродвигателя. На корпусе соосно входному валу жестко закреплено неподвижное эллиптическое зубчатое колесо, на выходном валу установлено другое эллиптическое зубчатое колесо. На входном валу установлено водило и соединено через вращательную кинематическую пару с валом сателлита, состоящего из эллиптического зубчатого колеса и эллиптической шестерни, повернутых на 180° относительно друг друга и соединенных валом, причем эллиптическое зубчатое колесо сателлита соединено с неподвижным эллиптическим зубчатым колесом одного с ним размера, а эллиптическая шестерня сателлита состоит в зубчатом зацеплении с эллиптическим зубчатым колесом одного с ним размера, при этом малая полуось b1 одной пары эллиптических колес может отличаться от малой полуоси b2 другой пары, а большие полуоси a всех эллиптических колес одинаковы. Все эллиптические колеса установлены на своих валах таким образом, что ось вращения вала проходит через точку, называемую фокусом делительного эллипса, которая расположена на большой полуоси делительного эллипса на расстоянии с1, равном  , от центра делительного эллипса для одной пары колес и расстоянии с2, равном
, от центра делительного эллипса для одной пары колес и расстоянии с2, равном  , для другой пары, и таким образом достигается непрерывность их зацепления. На водиле противоположно валу сателлита на расстоянии H, равном расстоянию между осями вращения входного вала и вала сателлита, установлен противовес, масса которого равна массе сателлита. На выходном валу и на одном из крыльев установлены шкивы, при этом шкив крыла установлен соосно шарниру, через который крыло соединено с корпусом. Ременная передача соединяет шкивы на выходном валу и на крыле, при этом один из концов каждого крыла выполнен в виде зубчатого сектора, передающего движение от ведущего крыла к ведомому.
, для другой пары, и таким образом достигается непрерывность их зацепления. На водиле противоположно валу сателлита на расстоянии H, равном расстоянию между осями вращения входного вала и вала сателлита, установлен противовес, масса которого равна массе сателлита. На выходном валу и на одном из крыльев установлены шкивы, при этом шкив крыла установлен соосно шарниру, через который крыло соединено с корпусом. Ременная передача соединяет шкивы на выходном валу и на крыле, при этом один из концов каждого крыла выполнен в виде зубчатого сектора, передающего движение от ведущего крыла к ведомому.
Изобретение поясняется следующими чертежами.
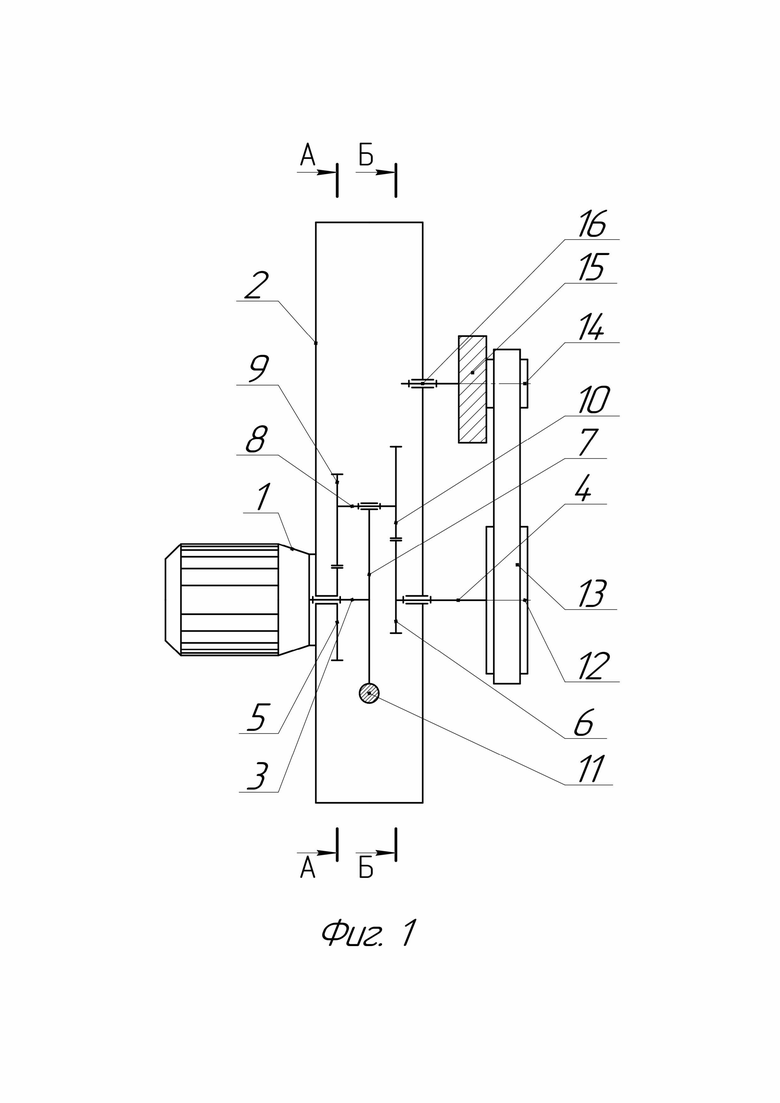
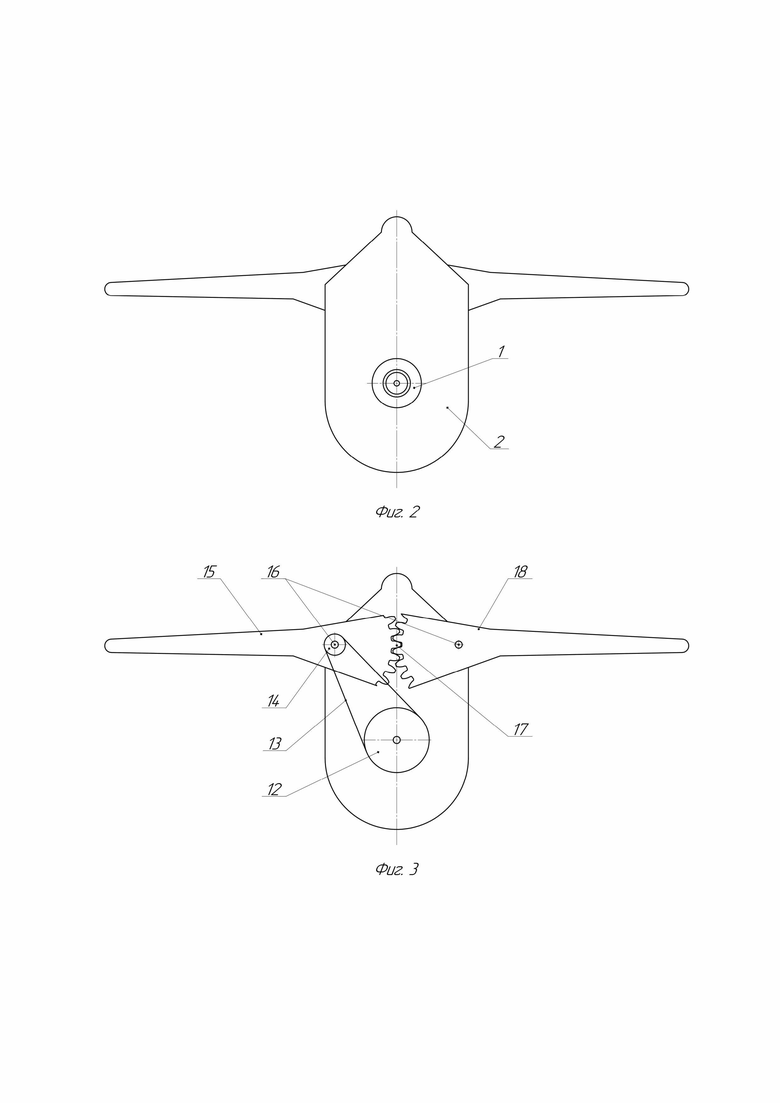
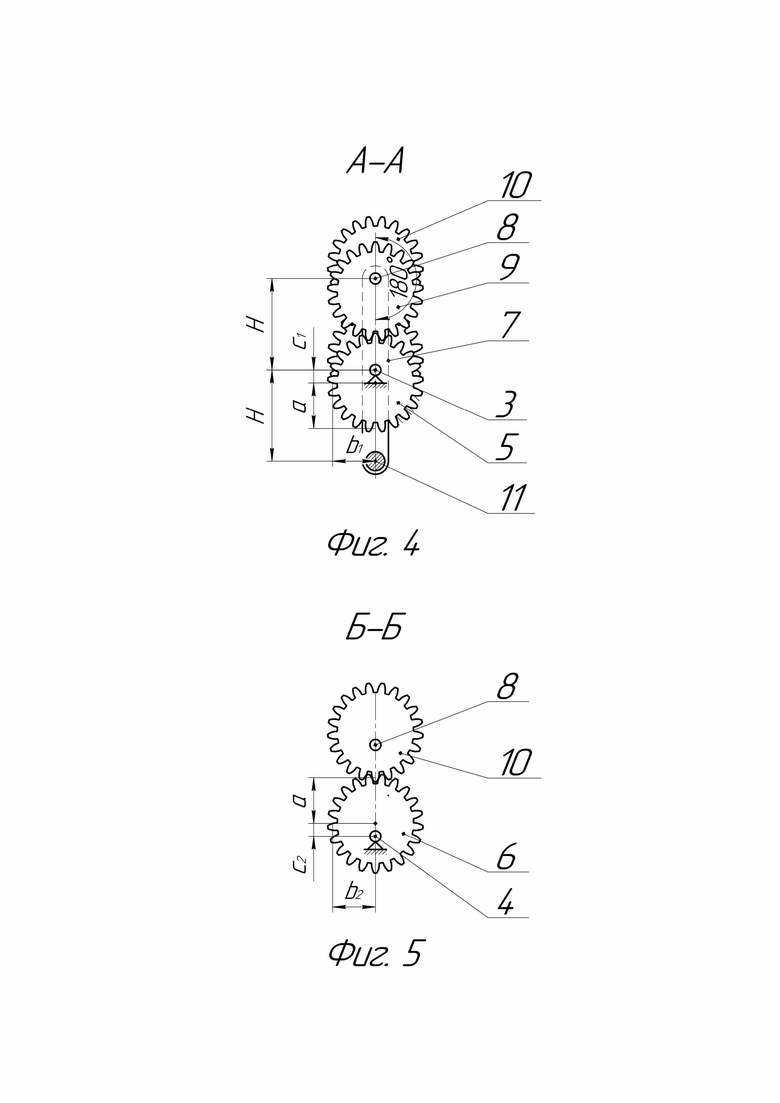
На фиг. 1 приведена схема орнитоптера, на фиг. 2, 3 изображены виды слева и справа, на фиг. 4 представлен разрез А-А (корпус не показан), на фиг. 5 представлен разрез Б-Б (корпус не показан).
Орнитоптер содержит электродвигатель 1, корпус исполнительного механизма 2, соосные входной вал 3 и выходной вал 4, при этом входной вал 3 жестко соединен с валом электродвигателя 1. Неподвижное эллиптическое зубчатое колесо 5 жестко закреплено на корпусе соосно входному валу 3. Эллиптическое зубчатое колесо 6 установлено на выходном валу 4. Водило 7 установлено на входном валу 3 и соединено через вращательную кинематическую пару с валом сателлита 8. Сателлит состоит из эллиптического зубчатого колеса 9 и эллиптической шестерни 10, повернутых на 180° относительно друг друга и соединенных валом 8 (фиг. 4, 5). Неподвижное эллиптическое зубчатое колесо 5 и эллиптическое зубчатое колесо 9 состоят в зацеплении и имеют одинаковые размеры, эллиптическая шестерня 10 и эллиптическое зубчатое колесо 6 также состоят в зацеплении и имеют одинаковые размеры, при этом малая полуось b1 пары колес 5 и 9 может отличаться от малой полуоси b2 пары колес 6 и 10, а большие полуоси a всех эллиптических колес одинаковы. Все эллиптические колеса установлены на своих валах таким образом, что ось вращения вала проходит через точку, называемую фокусом делительного эллипса, которая расположена на большой полуоси делительного эллипса на расстоянии с1, равном  , от центра делительного эллипса для пары колес 5 и 9, и расстоянии с2, равном
, от центра делительного эллипса для пары колес 5 и 9, и расстоянии с2, равном  , для пары 6 и 10, и таким образом достигается непрерывность их зацепления. На водиле 7 противоположно валу сателлита 8 на расстоянии H, равном расстоянию между осями вращения входного вала 3 и вала сателлита 8, установлен противовес 11, масса которого равна массе сателлита. На выходном валу закреплен шкив 12, который соединен ременной передачей 13 со шкивом 14, установленным на крыле 15 соосно шарнирному креплению 16 крыла с корпусом. Один из концов каждого крыла выполнен в виде зубчатого сектора 17 (фиг. 3), передающего движение от ведущего крыла 15 к ведомому крылу 18.
, для пары 6 и 10, и таким образом достигается непрерывность их зацепления. На водиле 7 противоположно валу сателлита 8 на расстоянии H, равном расстоянию между осями вращения входного вала 3 и вала сателлита 8, установлен противовес 11, масса которого равна массе сателлита. На выходном валу закреплен шкив 12, который соединен ременной передачей 13 со шкивом 14, установленным на крыле 15 соосно шарнирному креплению 16 крыла с корпусом. Один из концов каждого крыла выполнен в виде зубчатого сектора 17 (фиг. 3), передающего движение от ведущего крыла 15 к ведомому крылу 18.
Орнитоптер работает следующим образом.
Электродвигатель 1 сообщает входному валу 3 и соответственно закрепленному на нем водилу 7 вращательное движение, благодаря чему эллиптическое зубчатое колесо 9 обкатывается по неподвижному эллиптическому зубчатому колесу 5, вращательное движение колеса 9 через вал 8 и эллиптическую шестерню 10 передается эллиптическому зубчатому колесу 6 и выходному валу 4, при указанном соотношении размеров эллиптических колес выходной вал 4 через полный оборот входного вала 3 и водила 7 оказывается в том же положении, однако благодаря переменным передаточным отношениям пар эллиптических колес 9 и 5, 10 и 6 совершает возвратно-вращательное движение. Данное движение передается с помощью закрепленного на выходном валу 4 шкива 12 через ременную передачу 13 на шкив 14, что приводит к возвратно-вращательному (качательному) движению ведущего крыла 15. Далее это движение с помощью зубчатой передачи 17 передается ведомому крылу 18. Таким образом, маховые движения крыльев 15, 18 приводят к полету орнитоптера. Частота махов регулируется угловой скоростью вала электродвигателя, а угол качания крыльев определяется размером малых полуосей b1 и b2 эллиптических зубчатых колес, а также соотношением радиусов шкивов 12 и 14. Во время работы орнитоптера центр масс системы звеньев, включающей водило 7, вал сателлита 8, эллиптическое зубчатое колесо 9, эллиптическую шестерню 10, а также противовес 11, находится на оси вращения входного вала, что обеспечивает высокую уравновешенность орнитоптера.
Таким образом, использование преимущественно зубчатых передач в заявляемом изобретении по сравнению с рычажными механизмами определяет его компактность и уравновешенность, что обеспечивает достижение технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| Планетарный зубчатый привод стеклоочистителя | 2023 |
|
RU2815138C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Зубчатый механизм пресса | 2023 |
|
RU2817027C1 |
| Планетарный механизм преобразования вращательного движения в возвратно-вращательное | 2016 |
|
RU2616457C1 |
| Измельчитель плодоовощной продукции | 2023 |
|
RU2815851C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Лабораторный встряхиватель | 2023 |
|
RU2819973C1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
| Встряхиватель для пробирок | 2023 |
|
RU2821211C1 |
Изобретение относится к области авиации, а именно к устройствам, полет которых осуществляется с помощью машущих движений крыльев. Орнитоптер включает корпус с шарнирно установленными крыльями и электродвигатель, неподвижно закрепленный на корпусе. В корпусе установлены соосные входной и выходной валы. Входной вал жестко соединен с валом электродвигателя. На корпусе соосно входному валу жестко закреплено неподвижное эллиптическое зубчатое колесо, на выходном валу установлено другое эллиптическое зубчатое колесо. На входном валу установлено водило и соединено через вращательную кинематическую пару с валом сателлита, состоящего из эллиптического зубчатого колеса и эллиптической шестерни. На выходном валу и на одном из крыльев установлены шкивы. Ременная передача соединяет шкивы на выходном валу и на крыле, при этом один из концов каждого крыла выполнен в виде зубчатого сектора, передающего движение от ведущего крыла к ведомому. Обеспечивается высокая уравновешенность исполнительного механизма орнитоптера и уменьшение его габаритных размеров. 5 ил.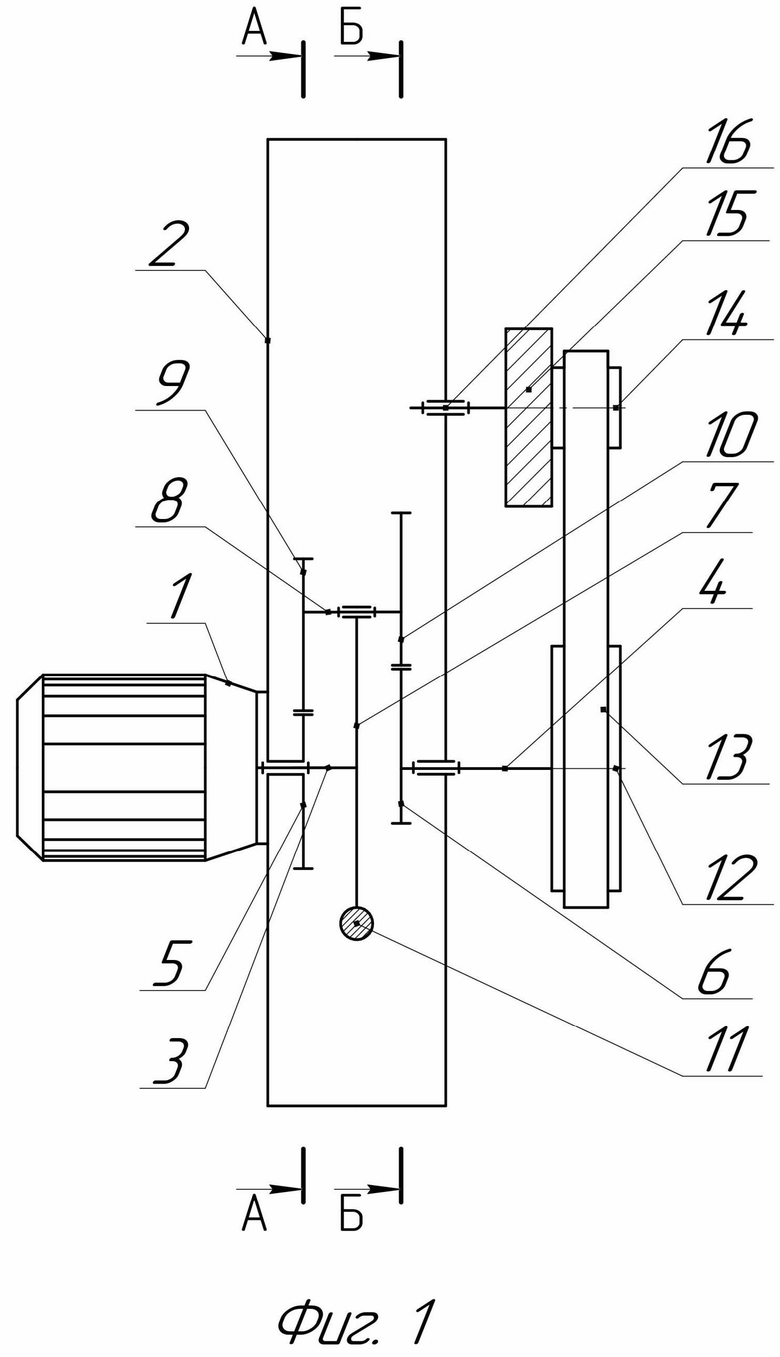
Орнитоптер, включающий корпус с шарнирно установленными крыльями, электродвигатель, неподвижно закрепленный на корпусе, отличающийся тем, что содержит установленные в корпусе соосные входной и выходной валы, при этом входной вал жестко соединен с валом электродвигателя, неподвижное эллиптическое зубчатое колесо, жестко закрепленное на корпусе соосно входному валу, эллиптическое зубчатое колесо, установленное на выходном валу, водило, установленное на входном валу и соединенное через вращательную кинематическую пару с валом сателлита, состоящего из эллиптического зубчатого колеса и эллиптической шестерни, повернутых на 180° относительно друг друга и соединенных валом, причем эллиптическое зубчатое колесо сателлита соединено с неподвижным эллиптическим зубчатым колесом одного с ним размера, а эллиптическая шестерня сателлита состоит в зубчатом зацеплении с эллиптическим зубчатым колесом одного с ним размера, при этом малая полуось b1 одной пары эллиптических колес может отличаться от малой полуоси b2 другой пары, а большие полуоси a всех эллиптических колес одинаковы, кроме того, все эллиптические колеса установлены на своих валах таким образом, что ось вращения вала проходит через точку, называемую фокусом делительного эллипса, которая расположена на большой полуоси делительного эллипса на расстоянии с1, равном  , от центра делительного эллипса для одной пары колес и расстоянии с2, равном
, от центра делительного эллипса для одной пары колес и расстоянии с2, равном  , для другой пары, и таким образом достигается непрерывность их зацепления, противовес, установленный на водиле противоположно валу сателлита на расстоянии H, равном расстоянию между осями вращения входного вала и вала сателлита, масса которого равна массе сателлита, шкив на выходном валу и шкив на одном из крыльев, установленный соосно шарниру, через который крыло соединено с корпусом, ременную передачу, соединяющую шкивы на выходном валу и на крыле, при этом один из концов каждого крыла выполнен в виде зубчатого сектора, передающего движение от ведущего крыла к ведомому.
, для другой пары, и таким образом достигается непрерывность их зацепления, противовес, установленный на водиле противоположно валу сателлита на расстоянии H, равном расстоянию между осями вращения входного вала и вала сателлита, масса которого равна массе сателлита, шкив на выходном валу и шкив на одном из крыльев, установленный соосно шарниру, через который крыло соединено с корпусом, ременную передачу, соединяющую шкивы на выходном валу и на крыле, при этом один из концов каждого крыла выполнен в виде зубчатого сектора, передающего движение от ведущего крыла к ведомому.
| ОКСИГЕНАТОР КРОВИ ПЕННО-ПЛЕНОЧНОГО ТИПА | 0 |
|
SU187245A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ АЛМАЗНОГО ИНСТРУМЕНТА ИЗ СИНТЕТИЧЕСКИХ АЛМАЗНЫХ ПОРОШКОВ | 0 |
|
SU180516A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2008 |
|
RU2438929C2 |
| 0 |
|
SU157031A1 | |
| CN 103492264 A, 01.01.2014. | |||

