1
Изобретение относится к промышленному транспорту, а именно к приводам конвейеров.
Цель изобретения - снижение энергоемкости привода при работе в прерьюистом режиме и увеличение срока службы.
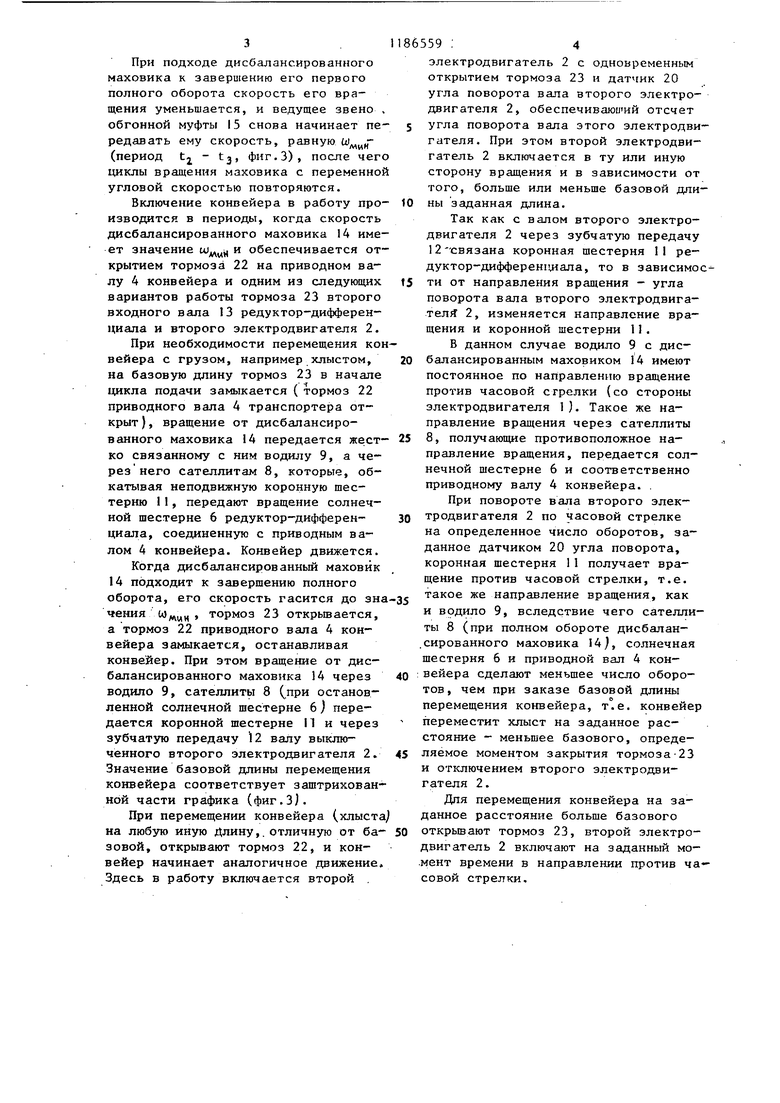
На фиг. схематически изобр)ажен привод конвейера; на фиг. 2 - узел крепления дисбалансированного махов ка к водилу редуктор-дифференциала; на фиг. 3 - график-диаграмма уловой скорости дисбалансированного маховика.
I Привод конвейера содержит первый I и второй 2 электродвигатели, редуктор-дифференциал 3 и приводной вал 4 приводного барабана (звездочки )транспортера 5.
Редуктор- дифференциал содеряа1т солнечную Шестерню 6, установленную на его выходном валу 7 сателлиты 8 с водилом 9, г оризонтальное плечо 10 которого является первым выходным валом редуктор-дифференциала, и коронную шестерню 11, посредством зубчатой передачи 12 связанную с вторым входным валом 13 редуктор-диференциала.
Привод также снабжен дисбалансированным маховиком 14, выполненны например, в виде сектора и устгшов- ленным на первом выходном валу 10 ; редуктор-дифференциала, который через обгонную муфту 15, редуктор 16 соединительную муфту 17 соединен с первым электродвигателем 1. Второй выходной вал I3 редуктор-дифференциала 3 соединительные муфты 18 и 19 соединен с приводным валом второго электродвигателя 2.
На валу второго электродвигателя 2 установлен датчик 20 угла его поворота и жестко связанная с валом коронная шестерня 11 редуктор-дифференциала. Выходной вал 7 редуктордифференциала через соединительную муфту 21 связан с приводным валом 4 конвейера.
Приводной вал 4 конвейера, второй входной вал 13 редуктор-дифференциала и обгонная муфта 15 снабжены тормозами 22-24 соответст--; венно.
Привод конвейера работает следующим образом.
Перед началом работы дисбалансированный маховик 14 находится в со865592
стоянии неустойчивого равновесия (верхнее положение), и тормоз 24 обгонной муфты 5 закрыт.
Подготовка транспортера к работе 5 состоит во включении первого электродвигателя 1, открытии тормозов 23 и 24 и закрытии тормоза 22,второй электродвигатель 2 выключен, но его вал может свободно вращаться.
О При вращении первого электродвигателя 1 в период, когда центр тяжести дисбалансированного маховика 14 находится в верхнем положении, угловая скорость ведущего звена об-
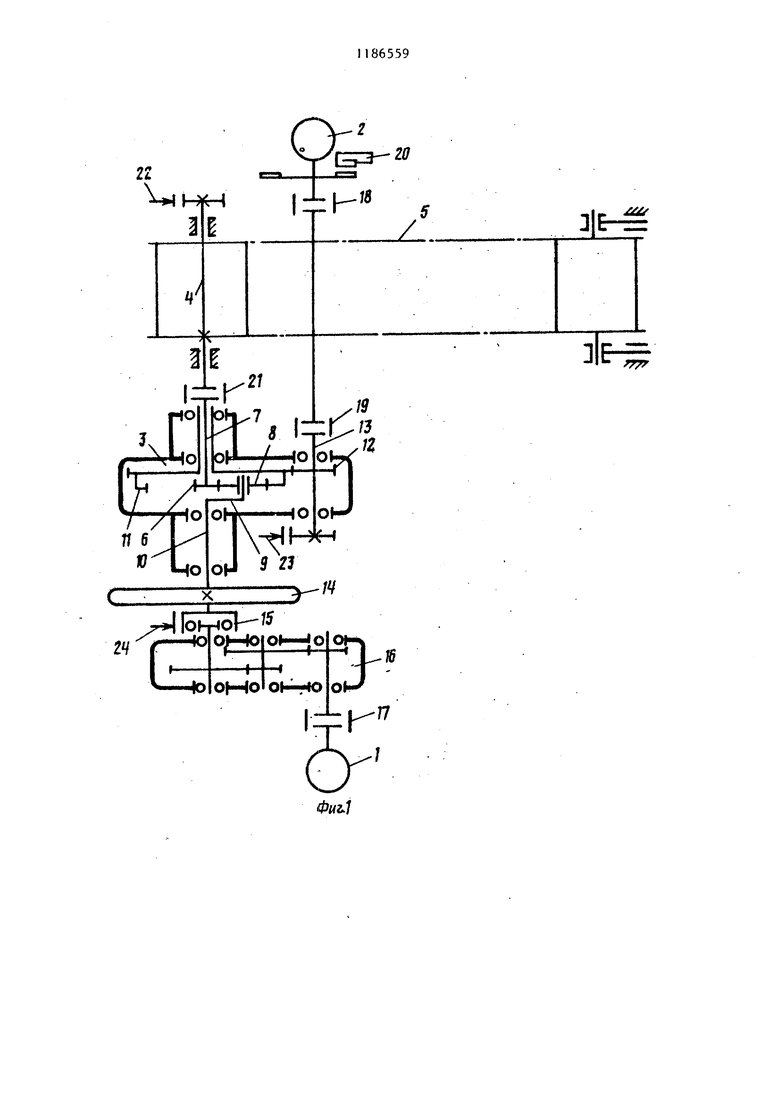
5 гонной муфты 15 больше угловой скорости дисбалансированного маховика 14 при его начальном свободном вращении и, таким образом, фактическая скорость вращения дисбалансйрован0 ного маховика 14 в этот период определяется первым электродвигателем 1. График угловой скорости дисбалансированного маховика 14 в этот момент соответствует значению (фиг. 3) в интервале t - t (от момента включения электродвигателя 1 и открытия тормоза 14 до момента, когда угловая скорость вращения дисбалансированного маховика при свободном0 движении достигает значения, определяемого электродвигателем l).
При дальнейшем движении угловая скорость дисбалансированного маховика при его свободном движении под
5 действием .несбалансированных масс
становится больше, чем скорость вращения ведущего звена обгонной муфты 15, и дисбалансированный маховик поворачивается по закону движения, оп-
0 ределяемому его собственными характеристиками:
Мс, sin Ч Мет
dt I
где 1л) - угловая скорость дисбалан- сированного Маховика;
MO - максимальный момент силы тя жести дисбалансированного маховика;
М(-у- момент сопротивления движению дисбалансированного маховика;
Ч - угол поворота дисбалансиророванного маховика от состояния неустойчивого рав- новесия;
I - момент инерции масс, приведенных к вany дисбапансированного маховика.
3
При подходе дисбалансированного маховика к завершению его первого полного оборота скорость его вращения уменьшается, и ведущее звено . обгонной муфты 15 снова начинает передавать ему скорость, равную Шд,„„ (период tj - tj, фиг.З), после чего циклы вращения маховика с переменной угловой скоростью повторяются.
Включение конвейера в работу производится в периоды, когда скорость дисбалансированного маховика 14 имеет значение ш, и обеспечивается открытием тормоза 22 на приводном валу 4 конвейера и одним из следующих вариантов работы тормоза 23 второго входного вала 13 редуктор-дифференциала и второго электродвигателя 2.
При необходимости перемещения конвейера с грузом, например хлыстом, на базовую длину тормоз 23 в начале цикла подачи замыкается ( тормоз 22 приводного вала 4 транспортера открыт ), вращение от дисбалансированного маховика 14 передается жестко связанному с ним водилу 9, а через него сателлитам 8, которые, обкатывая неподвижную коронную щестерню 11, передают вращение солнечной шестерне 6 редуктор-дифференциала, соединенную с приводным валом 4 конвейера. Конвейер движется.
Когда дисбалансированный маховик 14 подходит к завершению полного оборота, его скорость гасится до значения w,, , тормоз 23 открьтается, а тормоз 22 приводного вала 4 конвейера замыкается, останавливая конвейер. При этом вращение от дисбалансированного маховика 14 через водило 9, сателлиты 8 (при остановленной солнечной шестерне 6) передается коронной шестерне I1 и через зубчатую передачу 2 валу выключенного второго электродвигателя 2.. Значение базовой длины перемещения конвейера соответствует заштрихованной части графика (фиг.З).
При перемещении конвейера (хлыста на любую иную Длину,, отличную от базовой, открывают тормоз 22, и конвейер начинает аналогичное движение. Здесь в работу включается второй ,
86559 :4
электродвигатель 2 с одновременным открытием тормоза 23 и датчик 20 угла поворота вала второго электродвигателя 2, обеспечиваюший отсчет 5 угла поворота вала этого электродвигателя. При этом второй электродвигатель 2 включается в ту или иную сторону вращения и в зависимости от того, больше или меньше базовой дли- 10 ны заданная длина.
Так как с валом второго электродвигателя 2 через зубчатую передачу 12 связана коронная шестерня 11 ре- дуктор-дифферен 1лала, то в зависимое
15 ти от направления вращения - угла поворота вала второго электродвигатели 2, изменяется направление вращения и коронной шестерни 11.
В данном случае водило 9 с дисбалансированным маховиком 14 имеют постоянное по направлению вращение против часовой стрелки (со стороны электродвигателя 1). Такое же направление вращения через сателлиты
5 8, получающие противоположное направление вращения, передается солнечной шестерне 6 и соответственно приводному валу 4 конвейера. .
При повороте вала второго элек-
0 тродвигателя 2 по часовой стрелке на определенное число оборотов, заданное датчиком 20 угла поворота, коронная щестерня 11 получает вращение против часовой стрелки, т.е.
- такое же направление вращения, как и водило 9, вследствие чего сателлиты 8 (при полном обороте дисбалан- .сированного маховика 14, солнечная шестерня 6 и приводной вал 4 коно :вейера сделают меньшее число оборотов, чем при заказе базовой длины перемещения конвейера, т°. е. конвейер переместит хлыст на заданное расстояние - меньшее базового, определяемое моментом закрытия тормоза-23 и отключением второго электродвигателя 2.
Для перемещения конвейера на заданное расстояние больше базового
0 открьюают тормоз 23, второй электродвигатель 2 включают на заданный мо- .мент времени в направлении против часовой стрелки.
22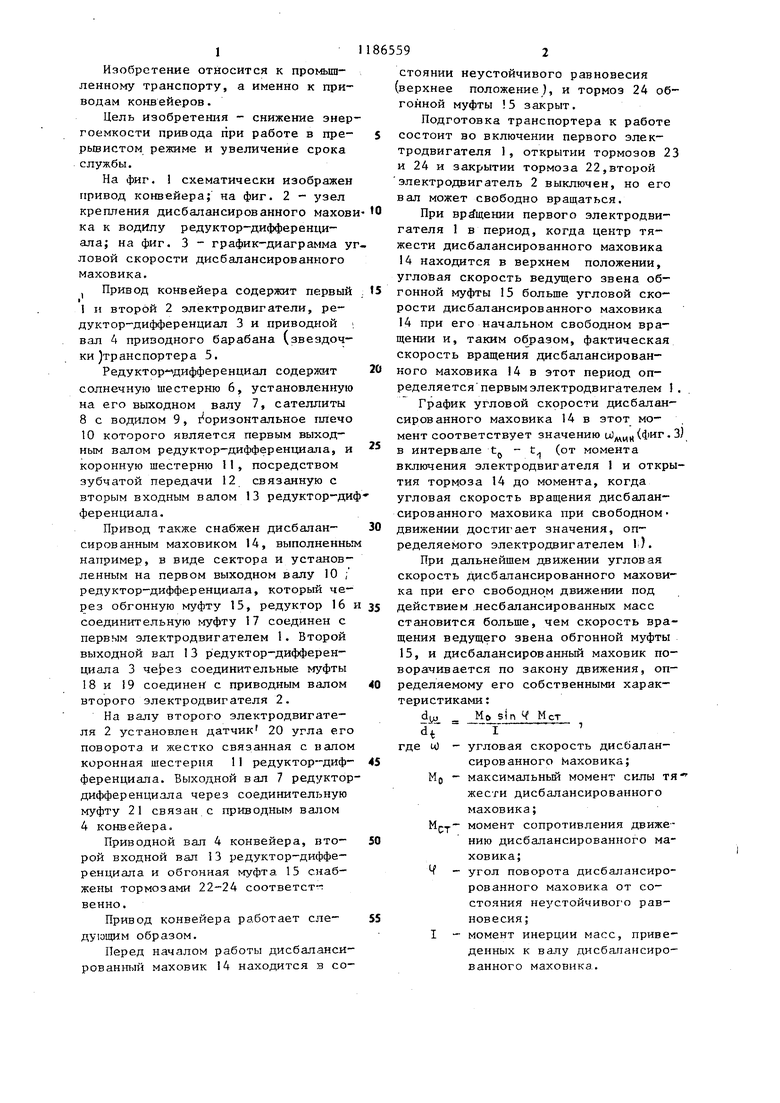
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХБАРАБАННЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 1971 |
|
SU297543A1 |
| СТАРТЕР С ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2013 |
|
RU2560932C2 |
| РЕКУПЕРАТИВНАЯ РЕВЕРСИВНАЯ БЕССТУПЕНЧАТАЯ ГИДРОТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2003 |
|
RU2259928C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРАI Ц^УйД 4ju^«;;-»' 1^^ I I.—._™.=»^- --'.ilii ^ <V '•''^' '• '*''• ''^ I | 1973 |
|
SU407802A1 |
| СПОСОБ ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2013 |
|
RU2529750C1 |
| ГИДРОМЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 1999 |
|
RU2162553C1 |
| Стартер для двигателя внутреннего сгорания | 1989 |
|
SU1701969A1 |
| КОРОБКА ПЕРЕДАЧ | 1992 |
|
RU2068516C1 |
| Транспортное средство с гибридной силовой установкой | 2016 |
|
RU2629648C1 |
| Приводное устройство эскалатора | 1982 |
|
SU1089029A1 |
ПРИВОД КОНВЕЙЕРА, содержащий первый и второй электродвигатели, соединенные соответственно с первым и вторым входными валами редуктордифференцийла, выходной вал которого связан с приводным валом конвейера, и тормоза, отлич ающийс я тем, что, с целью снижения энергоемкости привода при работе в прерывистом режиме и увеличения срока службы, он снабжен дисбалансированным маховиком, установленным на первом входном валу редуктор-дифференциала, обгоняй муфтой и редуктором, последовательно встроенными между дисбалансированным маховиком и первым электродвигателем, причем тормоза смонтированы на втором валу редуктор-дифференциала, обгонной, муфте и приводном валу кoнвeйepai а второй электродвигатель снабжен датчиком угла поворота его вала, при этом редуктор-дифференциал выполнен из солнечной шестерни, установленной на сл выходном валу редуктор-дифференциала, коронной шестерни, связанной при помощи .зубчатой передачи с вторым входным валом редуктор-дифференциала, и водила с сателлитами, жестко связанного с дисбалансированным маховиком. 00 О) СП СП о
loNHof n
C3
OjhHO
Of-I о
Э4
j
oMo
.2
| Привод скребкового конвейера | 1975 |
|
SU572022A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шахмейстер Л.Г | |||
| и др | |||
| Ленточноцепные конвейеры | |||
| -М.: ЦНИИТЭИуголь, 1963, с.60-61, рис.61. | |||
