Изобретение относится к медицинской технике, а именно к медицинским устройствам для иммобилизации конечностей в случае травм и переломов трубчатых костей, как временного характера, так и для окончательной фиксации.
Под понятием «иммобилизация» мы понимаем создание неподвижности (покоя) поврежденной части тела на определенный промежуток времени. Спектр применения иммобилизации достаточно широк - при переломах костей, повреждениях суставов, нервов, обширных повреждениях мягких тканей, тяжелых воспалительных процессах конечностей, ранении крупных сосудов и обширных ожогах. Иммобилизация бывает двух видов: транспортная и лечебная. Лечебная иммобилизация используется в качестве консервативного лечения переломов костей и повреждений суставов.
Несмотря на то, что создание покоя поврежденной конечности является временной мерой, она имеет большое значение, как для жизни пострадавшего, так и для дальнейшего течения и исхода повреждения в целом. Поэтому так важно доскональное понимание данного аспекта и максимальная социализация процессов иммобилизации в обществе.
Степень изученности проблемы.
Вопрос лечебной иммобилизации на сегодняшний день изучен наиболее полно. Существует большое количество материалов и методов лечения пациентов. К ним относятся:
Гипсовая иммобилизация с применением гипсовых повязок и шин разной конструкции: циркулярная (круговая) гипсовая повязка; окончатая гипсовая повязка с «окном», создающим доступ к ране, свищу и т.д.; мостовидная повязка, части которой выше и ниже места перелома соединяются как бы «перекинутыми мостиками» из дерева или металла, покрываемыми ходами бинтов, что создает более широкий доступ к ране и др. (Рычагов Г.П., Нехаев А.Н. Методы наложения повязок при травмах и некоторых заболеваниях. Учебное пособие, ISBN: 985-06-0210-4).
Иммобилизация при помощи шин - табельные (транспортные) и лечебные шины, которые позволяют более эффективно выполнить и сохранить надежную фиксацию при транспортировке и лечении.
Классическим вариантом табельных шин по-прежнему остаются лестничные шины (Крамера) - они наиболее универсальны и могут быть применены для иммобилизации самых разнообразных повреждений. Однако для некоторых повреждений существуют также более легкие, удобные в применении и портативные их аналоги (например, складные или сетчатые шины) (Каталог МЕДПЛАНТ https://medplant.ru/catalog/32/). Применение лубочных шин ограничено отсутствием возможности моделирования. Сетчатые шины недостаточно прочны и могут быть применены только для иммобилизации небольшого сегмента. Пневматические шины (каталог МЕДПЛАНТ https://medplant.ru/catalog/32/) имеют ограниченное применение и не могут быть рекомендованы к использованию в условиях чрезвычайных ситуаций, так как при открытых переломах могут усиливать кровотечение, работая как венозный жгут, они также подвержены механическим повреждениям.
Вакуумное шинирование - с использованием опорной вакуумно-каркасной шины. Шины легкие, их просто одевать и подгонять по ноге, легко регулировать стопу относительно голени, возможно самостоятельно стоять или передвигаться в течение 30-120 мин, на небольшие расстояния. Шины можно многократно использовать.
Известна шина вакуумная, содержащая герметичную гибкую камеру из полимерного материала, заполненного гранулами из вспененного полистирола, снабженную обратным клапаном, и фиксирующие ленты, закрепленные на чехле, отличающаяся тем, что гранулы из вспененного полистирола размещены в вертикальных секциях вкладыша, находящегося внутри камеры, выполненного из текстильного материала по форме и размеру камеры, камера расположена внутри чехла из текстильного материала с односторонним полимерным покрытием, на чехле закреплен держатель с ремнями и пряжками с подвижным звеном и стремя, соединенное с держателем ремнями и карабинами, при этом шина имеет в верхней части углубление в области паха (патент RU №2216297, 2003). Предлагаемая шина предназначена для использования в неврологических отделениях стационаров и в процессе самостоятельного восстановительного лечения больных с нарушением опорно-двигательной функции нижних конечностей.
Иммобилизация при помощи ортезов используется в основном при переломах без смещения (в виде специальной обуви, бандажей, корсетов). За счет ортеза снижается нагрузка на суставы и доступно уменьшить их объем движений (https://osustavaxt.ru/ustroystva-immobilizatsii-kolennogo-sustava-luchshie-ortezy-bandazhi-tutory/).
Несмотря на всестороннюю изученность проблемы, все вышеперечисленные методы и используемые устройства имеют ряд недостатков, таких как:
• высокий уровень травматизации тканей;
• частое образование мышечных атрофий и контрактур иммобилизированной конечности;
• развитие лимфовенозного стаза, флебитов, высокий риск тромбообразования;
• низкая пропускная способность для рентгеновского излучения;
• недоступность местного воздействия на перелом;
• раздражающее действие иммобилизационного материала на кожный покров (дерматиты, аллергические реакции, пролежни);
• высокая гигроскопичность материалов. Уровень техники.
Известно устройство для комплексной иммобилизации конечностей, разработанное специально для лечения переломов конечностей в области голени, бедра, предплечья и плеча, имеет, по меньшей мере, две взаимно сжимаемые половины окружающие конечность для иммобилизации. Между сжимаемыми половинами находятся деформируемые, герметичные вакуумизируемые подушки, по меньшей мере, с одним клапаном, содержащим множество мелкозернистых частиц наполнителя, подвижных относительно друг друга (WO1992004880Al,1992). Устройство отличается сложностью конструкции, механическим насосом во время работы которого может произойти смещение элементов конструкции относительно конечности, а в ходе эксплуатации возможно появление негерметичности изделия. В конструкции не предусмотрены модули физиотерапевтического воздействия на зону повреждения и возможной гематомы, а так же проведения комплекса реабилитационных методик по сохранению тонуса и массы иммобилизированных мышц поврежденного сегмента.
Известно вакуумное иммобилизационное устройство, характеризующееся складной системой по типу конверта, включающий одну или несколько полостей, соединенные между собой внутренними полостями, заполненными большим количество маленьких, легких гранул или частиц, изготовленных из вспененного полимера, который может быть микро шаром, содержащие вспененную полимерную оболочку, вспененный полимер такого типа сильно деформируются и сжимается. В подготовленном к работе устройстве гранулы расположены свободно, для свободного формирования корпуса устройства вокруг области повреждения, например рука пациента; При создании сниженного давления внутри устройства давление внешнего воздуха сжимает гибкий внешний корпус и происходит субдеформационное давление на всю массу сжимаемых пенопластовых гранул, уменьшая и деформируя их, чтобы сформировать уплотненную массу и создавая высокий коэффициент трения за счет существенного контакта между соседними гранулами сплющенными участками, значительно уменьшая вращательное движение каждой гранулы. Достижение герметичности устройства достигается механическим или внешним электрическим вакуумным насосом. Устройство может быть применено не только как постоянное иммобилизационное для лечения переломов конечностей, но и как транспортная шина или же, как система временной иммобилизации (US 3745998 A, 1973).
Устройство исходя из своей конструкции обладает типичными недостатками - острой зависимостью от целостности корпуса и сохраняемой иммобилизацией, возрастающей в ходе непрерывной эксплуатации изделия, особенно при применении в лечении переломов, устройство не гигроскопично, и создает зоны раздражения кожи в точках прикосновения с кожными покровами.
У устройства нет системы объективного контроля герметичности вакуумизированных камер, и субъективно заметить разгерметизацию можно только при потере устройством пространственной стабильности. У устройства отсутствуют механизмы перевода его в постоянную иммобилизацию кроме как герметизации впускных клапанов.
Также известны устройства для быстрой временной фиксации с использованием избыточного давления (относительно давления атмосферного воздуха), например, комплект шин иммобилизационных пневматических КШв-2 (http://www.medrk.ru/shop/medicinskoe-oborudovanie/immobilizaciya/id-26258). Преимуществами пневматических шин является то, что они обеспечивают быструю фиксацию поврежденных участков тела в неподвижном положении до поступления в лечебное учреждение, не требуют длительных подготовительных процедур, а также являются рентгенопрозрачными при проведении исследований, что позволяет снизить количество травмирующих действий для пациента.
Однако при использовании пневматических и вакуумных шин необходим визуальный контроль состояния шины во время транспортировки пациента, шины не предназначены для длительного использования пациентом. Для поддержания необходимого давления в шинах необходимо ручное воздействие на соответствующие насосы, а также возможно создание парникового эффекта на коже пациента, что усиливает вероятность развития болезнетворной микрофлоры на коже с дальнейшим заражением имеющихся ран.
Наиболее близким по совокупности существенных признаков является шина иммобилизационная вакуумная серии ВШВ-2 разработки ООО «НПФ «Медтехника» (г. Санкт-Петербург), принятая за прототип. Шина имеет деформируемый вакуумно-плотный корпус с возможностью обхватывания травмированной конечности и элементы фиксации. Внутри корпус, заполнен гранулированным наполнителем. Воздух откачивают через клапан ручным насосом (http://medtechnics.m/mimmobilizatsionnyie-vakuumnyie/).
Преимуществами устройства являются быстрота и легкость использования, четкая фиксация конечностей, минимальные временные затраты на оказание помощи пострадавшему при транспортировке с места получения травмы до лечебного учреждения.
Недостатками известного устройства являются:
- затраты времени на необходимость ручного воздействия на насос для создания вакуума в шине;
- отсутствие контроля величины давления в шине;
- наличие «парникового эффекта» кожи и отсутствие возможности гигиены кожи при длительной иммобилизации;
- шина не предназначена для финальной фиксации с терапевтическим лечением.
Задачей, на решение которой направлено изобретение, является создание простого в исполнении устройства для циркулярной иммобилизации конечностей с расширенными функциональными возможностями: надежная временная и финальная иммобилизация конечности с возможностью автоматического контроля процесса фиксации, наличие доступа к гигиенической очистке кожи иммобилизованного участка конечности, возможность проведения терапевтических воздействий с применением пониженной температуры и электрического тока на иммобилизованные участки конечности.
Техническим результатом заявляемого технического решения является повышение скорости фиксации конечности, как временной, так и финальной, за счет уменьшения количества необходимых операций, своевременного получения информации о состоянии процесса фиксации травмированной конечности; повышение уровня гигиенического состояния кожи поврежденного участка конечности за счет наличия доступа к коже; сокращение времени реабилитации за счет наличия терапевтического воздействия на поврежденный участок конечности за счет гипертермии и электростимуляции.
Технический результат достигается за счет того, что в устройстве для циркулярной иммобилизации конечностей, включающем деформируемый вакуумно-плотный цилиндрический корпус для обхватывания конечности, заполненный гранулированным наполнителем и подключенный к нему вакуумный насос, согласно технического решения, корпус выполнен в виде полых полимерных биосовместимых трубок, имеющих переплетение вакуумных полостей по типу сетки, вакуумный насос выполнен в виде компактного съемного вакуумного модуля, содержащий микроконтроллер соединенный с источником питания, через реле вакуумного насоса с двигателем вакуумного насоса, с датчиком давления, с элементами управления, с дисплеем, с динамиком, при этом вход вакуумного модуля через ловушку в виде лабиринта подключен через быстросъемный вакуумный ниппель к вакуумному разъему корпуса с резиновым уплотнением, при этом вакуумный модуль соединен с дополнительно установленным съемным терапевтическим модулей, посредством шины данных и шины питания, который включает цифро-аналоговый преобразователь, реле элементов Пельтье, и внешние компоненты в виде электродов для электростимуляции, элементов Пельтье и датчиков температуры, а другой вакуумный разъем корпуса с резиновым уплотнением подключен к дополнительно установленному съемному модулю финальной фиксации, содержащий последовательно соединенные быстросъемный вакуумный ниппель и неподвижный шнек, к которому подключены параллельно через разрушаемые диафрагмы не менее двух емкостей с компонентами быстротвердеющих жидкостей, в объеме достаточном для заполнения корпуса устройства, обеспечивающим смешивание жидкостей и их подачу в вакуумную систему корпуса после механического воздействия на модуль финальной фиксации и разрушения диафрагм.
Выполнение корпуса в виде полых полимерных биосовместимых трубок, имеющих переплетение вакуумных полостей по типу сетки обеспечивает доступ к коже иммобилизованного участка конечности, что позволяет проводить гигиеническую очистку кожи, при сохранении требуемой жесткости конструкции.
Выполнение вакуумного насоса в виде компактного съемного вакуумного модуля, содержащего микроконтроллер, соединенный с источником питания, через реле вакуумного насоса с двигателем вакуумного насоса, с датчиком давления, с элементами управления, с дисплеем, обеспечивает повышение скорости фиксации поврежденного участка конечности за счет автоматического откачивания воздуха из вакуумной полости корпуса и поддержания заданного давления, а также обеспечивает уменьшение необходимых операций для временной фиксации конечности. Применение в вакуумном модуле микроконтроллера, элементов управления, дисплея, динамика обеспечивает выбор режима работы модуля, индикацию визуальную и звуковую состояния заряда источника питания, текущей величины давления и информации об неисправностях.
Подключение входа вакуумного насоса в вакуумном модуле через ловушку в виде лабиринта через быстросъемный вакуумный ниппель к вакуумному разъему корпуса с резиновым уплотнением обеспечивает защиту вакуумного насоса в вакуумном модуле, обеспечивает возможность снятия вакуумного модуля для проведения гигиены кожи при финальной фиксации конечности.
Применение дополнительно съемного терапевтического модуля, соединенного посредством шины данных и шины питания с вакуумным модулем, и содержащим цифро-аналоговый преобразователь, реле элементов Пельтье, и внешние компоненты в виде электродов для электростимуляции, элементов Пельтье и датчиков температуры, обеспечивает возможность снятия терапевтического модуля для проведения гигиены кожи при финальной фиксации конечности, обеспечивает охлаждение и контроль температуры поврежденной конечности на всех этапах иммобилизации, и обеспечивает повышение мышечной активности и интенсивности кровообращения в поврежденной конечности.
Применение дополнительно съемного модуля финальной фиксации, подключенного к другому вакуумному разъему корпуса с резиновым уплотнением, содержащего последовательно соединенные быстросъемный вакуумный ниппель и неподвижный шнек, к которому подключены параллельно через разрушаемые диафрагмы емкости, не менее двух, с компонентами быстротвердеющих жидкостей, в объеме достаточном для заполнения корпуса устройства, обеспечивает равномерное смешивание жидкостей, затвердевающих при смешивании, и их подачу в вакуумную систему корпуса после механического воздействия на модуль финальной фиксации и разрушения диафрагм, обеспечивает финальную фиксацию конечности, а так же возможность снятия модуля финальной фиксации для проведения гигиены кожи, и обеспечивает уменьшение необходимых операций для финальной фиксации конечности.
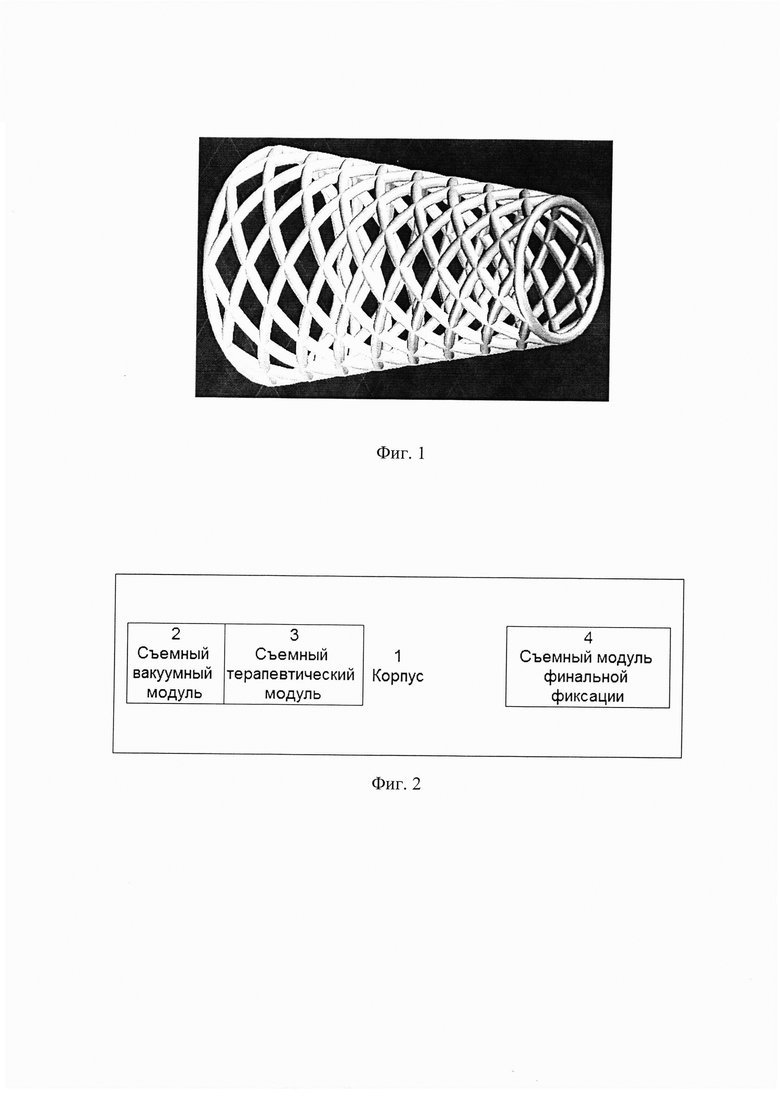
На Фиг. 1 представлен пример выполнения корпуса устройства для циркулярной иммобилизации конечностей.
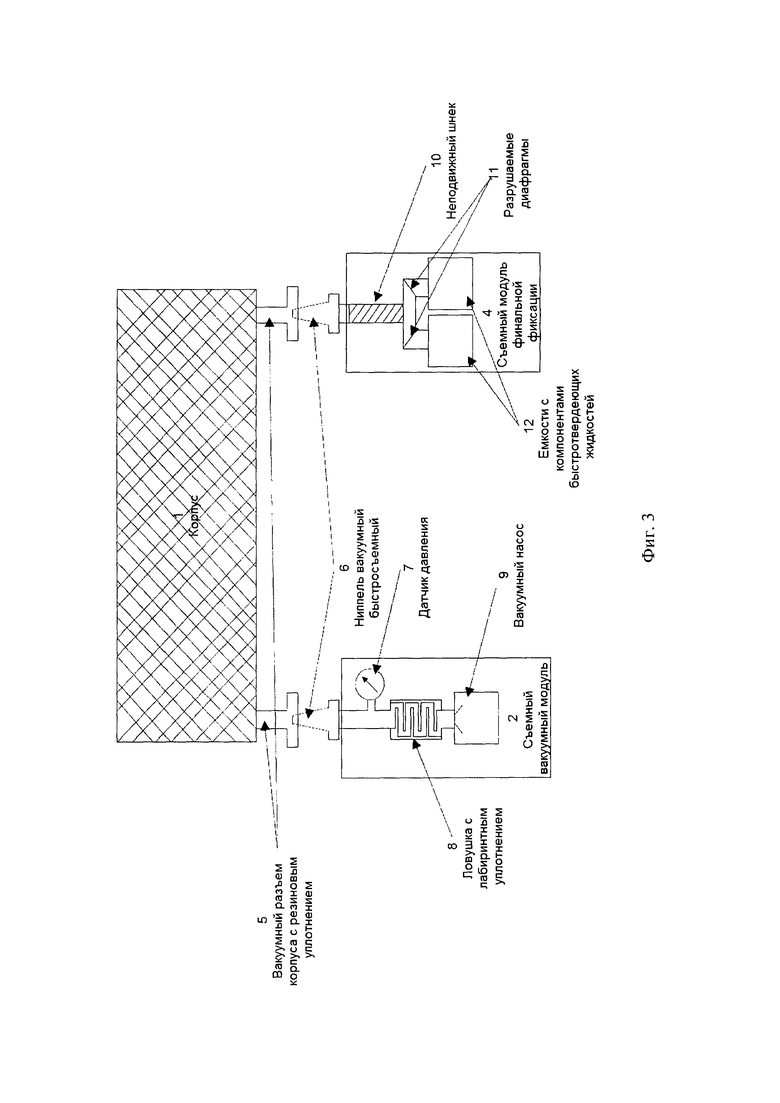
На Фиг. 2 представлена блок-схема размещения основных элементов устройства для циркулярной иммобилизации конечностей.
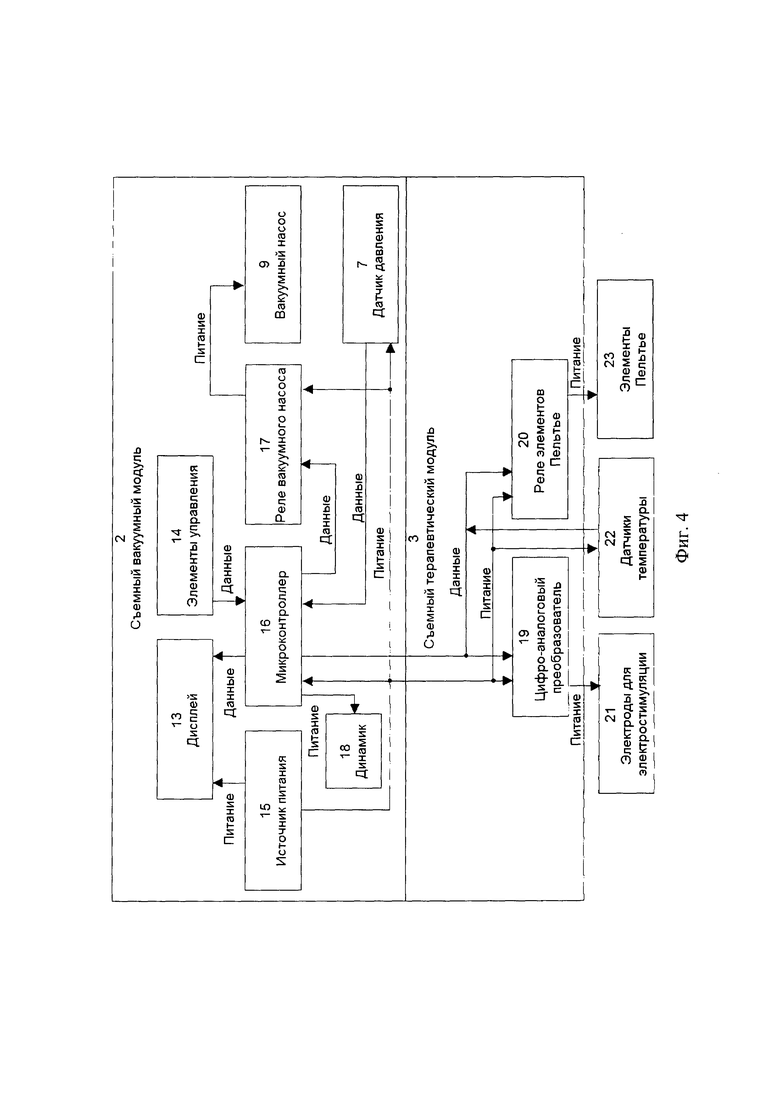
На Фиг. 3 представлена блок-схема соединений вакуумных линий устройства для циркулярной иммобилизации конечностей.
На Фиг. 4 представлена блок-схема электрических соединений устройства для циркулярной иммобилизации конечностей.
Устройство для циркулярной иммобилизации конечностей содержит корпус 1 из полых полимерных биосовместимых трубок, в виде переплетенных вакуумных полостей по типу сетки (Фиг. 1) в форме усеченного конуса, съемный вакуумный модуль 2, съемный терапевтический модуль 3, съемный модуль финальной фиксации 4 (Фиг. 2). Так же в соответствии с блок-схемой соединений вакуумных линий устройства (Фиг. 3) устройство имеет два вакуумных разъема корпуса с резиновым уплотнением 5, два ниппеля вакуумных быстросъемных 6, датчик давления 7, ловушку с лабиринтным уплотнением 8, вакуумный насос 9, неподвижный шнек 10, разрушаемые диафрагмы 11, две емкости 12 с компонентами быстротвердеющих жидкостей, которые смешиваются и подаются в вакуумную систему корпуса после механического воздействия на модуль и разрушения диафрагм.
В соответствии с блок-схемой электрических соединений (Фиг. 4) устройство содержит дисплей 13, элементы управления 14, источник питания 15, микроконтроллер 16, реле вакуумного насоса 17, динамик 18, цифро-аналоговый преобразователь 19, реле элементов Пельтье 20, электроды для электростимуляции 21, датчики температуры 22, элементы Пельтье 23.
Вакуумная схема устройства для циркулярной иммобилизации конечностей выполнена следующим образом:
- вход съемного вакуумного модуля 2 через ниппель вакуумный быстросъемный 6 подключен к одному вакуумному разъему корпуса с резиновым уплотнением 5 корпуса 1;
- вход съемного вакуумного модуля 2 подключен через ловушку с лабиринтным уплотнением 8 к вакуумному насосу 9, при этом вход съемного вакуумного модуля 2 соединен с датчиком давления 7;
- выход съемного модуля финальной фиксации 4 через ниппель вакуумный быстросъемный 6 подключен к другому вакуумному разъему корпуса с резиновым уплотнением 5 корпуса 1;
- выход съемного модуля финальной фиксации 4 через неподвижный шнек 10 соединен параллельно с емкостями 12, заполненными компонентами быстротвердеющих жидкостей, через разрушаемые диафрагмы 11.
Электрическая схема устройства для циркулярной иммобилизации конечностей выполнена следующим образом:
- источник питания 15 соединен с датчиком давления 7, с дисплеем 13, с микроконтроллером 16, с входом питания реле вакуумного насоса 17;
- выходы данных микроконтроллера 16 соединен с дисплеем 13 и с входом управления реле вакуумного насоса 17, вход данных микроконтроллера 16 соединен с датчиком давления 7 и элементами управления 14;
- выход питания (аналоговый выход) микроконтроллера 16 соединен с входом динамика 18, при этом выход питания реле вакуумного насоса 17 соединен с входом питания вакуумного насоса 9;
- съемный вакуумный модуль 2 соединен через шину данных и шину питания со съемным терапевтическим модулем 3, так что выход источника питания 15 соединен со входом питания цифро-аналогового преобразователя 19 и с входом питания реле элементов Пельтье 20, и с датчиками температуры 22, а вход/выход данных микроконтроллера 16 соединен с входом данных цифро-аналогового преобразователя 19, с входом управления реле элементов Пельтье 20 и с выходом данных датчиков температуры 22;
- выход питания (аналоговый выход) цифро-аналогового преобразователя 19 соединен с входами электродов для электростимуляции 21, выход питания реле элементов Пельтье 20 соединен с входами питания элементов Пельтье 23.
Техническая реализация заявленного решения осуществляется с использованием готовых устройств, (например):
1) корпус 1 из полых полимерных биосовместимых трубок, имеющих переплетение вакуумных полостей по типу сетки, изготовлен литьем биосовместимого полимера (например, силикона) в форму;
2) съемный вакуумный модуль 2 - составные части 6-9, 13-18;
3) съемный терапевтический модуль 3 - составные части 19-23;
4) съемный модуль финальной фиксации 4 - составные части 6, 10-12;
5) вакуумный разъем корпуса с резиновым уплотнением 5 - шланг ПВХ диаметр 6 мм и резиновая прокладка диаметром 6 мм (внутренний диаметр 4 мм).
6) ниппель вакуумный быстросъемный 6 - ниппель быстросъемный Stels диаметр 4 мм;
7) датчик давления 7 - датчик давления XGZP6847;
8) ловушка с лабиринтным уплотнением 8 - корпус с каналом в виде лабиринта, изготовленный на 3d-принтере;
9) вакуумный насос 9 - микро вакуумный насос SC3101PM;
10) неподвижный шнек 10 - насадка-миксер из состава «Супер-Эпокси Момент»;
11) разрушаемые диафрагмы 11 - диафрагмы из алюминиевой фольги толщиной 1 мм;
12) емкости с компонентами быстротвердеющих жидкостей 12 -мягкие пластиковые емкости объемом 100 мл с быстрозатвердевающим полиуретаном Smooth-On Task 8;
13) дисплей 13 - дисплей WH1604 В-YYH-CT;
14) элементы управления 14 - переключатели кнопочные PSW-4016B БФЧБ;
15) источник питания 15 - аккумулятор типоразмера 18650;
16) микроконтроллер 16 - микроконтроллер ESP8266;
17) реле вакуумного насоса 17 - реле JQC3F-05VDC-C;
18) динамик 18 - пьезокерамический излучатель SMA-13-P10;
19) цифро-аналоговый преобразователь 19 - цифро-аналоговый преобразователь AD5322BRMZ;
20) реле элементов Пельтье 20 - реле JQC3F-05VDC-C;
21) электроды для электростимуляции 21 - клейкие электроды VUPIESSE диаметр 25 мм;
22) датчики температуры 22 - датчик температуры DS18 В20;
23) элементы Пельтье 23 - модуль Пельтье термоэлектрический ТВ-127-1,4-2,5, фирмы Криотерм.
Устройство для циркулярной иммобилизации конечностей работает в нескольких режимах: временная иммобилизация конечности пациента; финальная иммобилизация конечности пациента; временная иммобилизация конечности пациента с проведением терапевтических воздействий; финальная иммобилизация конечности пациента с проведением терапевтических воздействий. Необходимый режим работы выбирают в зависимости от требуемого результата.
1. Временная иммобилизация конечности пациента.
Осуществляется при следующих показаниях: ушибы, растяжения, переломы. Происходит на доврачебном этапе, без контроля врача, без контроля рентгена, при неуверенности правильности репозиции, при возможном ущемлении структур сосудистых или невральных.
Применяется как мера экстренной помощи, когда стабилизация принесет пользы больше, чем ее отсутствие.
В подготовленном к работе устройстве для циркулярной иммобилизации конечностей полимерные трубки с гранулами корпуса 1 и со свободным воздухом подвижны относительно друг друга и легко перемещаются, изгибаются, и моделируются под индивидуальные особенности конечности пострадавшего, что позволяет установить устройство в рабочее положение на пострадавшей конечности («одеть»).
После приведения устройства для циркулярной иммобилизации конечностей в рабочее положение включают съемный вакуумный модуль 2, с помощью элементов управления 14 и дисплея 13 выбирают длительность времени иммобилизации, после выбирают выполнение иммобилизации на заданное время или до принудительного отключения. При выполнении временной иммобилизации питание съемного вакуумного модуля 2 осуществляется с помощью встроенного источника питания 15, при этом микроконтроллер 16 включает вакуумный насос 9 через реле вакуумного насоса 17 и осуществляется откачка воздуха в корпусе 1, при этом откачка воздуха осуществляется до уровня заданной установки, измерение давления осуществляется микроконтроллером 16 с помощью датчика давления 7. При достижении заданного давления вакуумный насос 9 отключается, включается вновь при повышении давления за счет естественных незначительных «натечек» воздуха в корпус 1.
Откачка воздуха съемным вакуумным модулем 2 осуществляется через вакуумный разъем корпуса с резиновым уплотнением 5, через ниппель вакуумный быстросъемный 6, через ловушку с лабиринтным уплотнением 8 (для защиты вакуумного насоса 9 от попадания гранул из корпуса 9) и вакуумный насос 9.
За счет создания отрицательного давления в системе полимерных трубок корпуса 1 и давления на стенки устройства атмосферного воздуха создается прижимная сила между внутренними стенками трубок и гранулами, а так же уменьшение физических размеров трубок и их частичного дозированного сокращения, что приводит к охвату всех изгибов пораженной конечности и обеспечивает жесткую временную иммобилизацию.
По истечении заданного времени временной иммобилизации микроконтроллер 16 индицирует на дисплее 13 о завершении работы, сигнализирует с помощью звукового сигнала посредством динамика 18.
Временная иммобилизация без указания конкретного времени осуществляется до отмены режима с использованием элементов управления 14. В случае наличия неисправности датчика давления 7, или невозможности достижения заданной величины давления (за счет не герметичности корпуса 1) или скорой разрядки источника питания 15 микроконтроллер 16 сигнализирует предупреждающую информацию о неисправности на дисплее 13 и с помощью динамика 18.
2. Временная иммобилизация конечности пациента с проведением терапевтических воздействий.
Осуществляется аналогичным образом, в соответствии с пунктом 1. При этом во время проведения процедуры временной иммобилизации с использованием элементов управления 14 и дисплея 13 можно выбрать и включить на съемном терапевтическом модуле 3 следующие команды:
- охлаждение поверхности кожных покровов (обычно для снятия отеков в месте ушиба) установленной длительности или до ввода отмены с использованием элементов управления 14;
- электростимуляцию мышц конечности (обычно для дополнительной активизации циркуляции крови в долго иммобилизированных конечностях) установленной длительности или до ввода отмены с использованием элементов управления 14.
При охлаждении поддерживается температура пораженного участка в пределах 15-20 градусов по следующей методике - 2 часа охлаждение с перерывом в 10 часов, для предотвращения отека мягких тканей области перелома и формирования ущемления мягких тканей в области контакта фиксирующего устройства и кожных покровов (Травматология и ортопедия. Г.С. Юмашев, ISBN-10: 5458390741). При электромиостимуляции с целью предотвращения атрофии мышц поврежденной конечности и воздействия на пораженную конечность используются низкочастотные импульсные токи заданной формы и частоты в течение заданного времени (Пономаренко, Г.Н. Медицинская реабилитация: Учебник / Г.Н. Пономаренко - М.: ГЭОТАР-Медиа, 2014.-360 с).
Охлаждение осуществляется за счет включения элементов Пельтье 23 через реле элементов Пельтье 20 посредством микроконтроллера 16 с постоянным контролем места соприкосновения элементов Пельтье 23 с кожей пациента посредством датчиков температуры 22, для предотвращения чрезмерного охлаждения кожи пациента.
Электростимуляция осуществляется за счет подачи аналоговых сигналов с цифро-аналогового преобразователя 19 на электроды для электростимуляции 21 посредством микроконтроллера 16.
По истечении заданного времени проведения терапии микроконтроллер 16 индицирует на дисплее 13 о завершении работы, сигнализирует с помощью звукового сигнала посредством динамика 18.
3. Финальная иммобилизация конечности пациента.
Осуществляется при следующих показаниях:
- нет угрозы нарастания отека;
- нет угрозы дислокации фрагментов трубчатой кости;
- подтвержденная репозиция костной ткани;
- правильность наложения системы иммобилизации - контроль врача;
- выбранное положение гарантирует достаточную надежность соединения фрагментов костной ткани;
- нет явного сдавления нервных и сосудистых структур;
- нет признаков повреждения сосудов или нервных структур, в том числе их полного перерыва.
Финальная иммобилизация осуществляется через прохождение этапа временной иммобилизации.
В подготовленном к работе устройстве для циркулярной иммобилизации конечностей полимерные трубки с гранулами корпуса 1 и со свободным воздухом подвижны относительно друг друга и легко перемещаются, изгибаются, и моделируются под индивидуальные особенности конечности пострадавшего, что позволяет установить устройство в рабочее положение на пострадавшей конечности («одеть») и выполнить любые манипуляции с конечностью и фрагментами костной ткани в этапах репозиции отломков.
После приведения устройства для циркулярной иммобилизации конечностей в рабочее положение включают съемный вакуумный модуль 2, с помощью элементов управления 14 и дисплея 13 выбирают длительность времени иммобилизации, после выбирают выполнение иммобилизации на заданное время или до принудительного отключения. При выполнении временной иммобилизации питание съемного вакуумного модуля 2 осуществляется с помощью встроенного источника питания 15, при этом микроконтроллер 16 включает вакуумный насос 9 через реле вакуумного насоса 17 и осуществляется откачка воздуха в корпусе 1, при этом откачка воздуха осуществляется до уровня заданной установки, измерение давления осуществляется микроконтроллером 16 с помощью датчика давления 7. При достижении заданного давления вакуумный насос 9 отключается, включается вновь при повышении давления за счет естественных незначительных «натечек» воздуха в корпус 1.
Откачка воздуха съемным вакуумным модулем 2 осуществляется через вакуумный разъем корпуса с резиновым уплотнением 5, через ниппель вакуумный быстросъемный 6, через ловушку с лабиринтным уплотнением 8 (для защиты вакуумного насоса 9 от попадания гранул из корпуса 9) и вакуумный насос 9.
За счет создания отрицательного давления в системе полимерных трубок корпуса 1 и давления на стенки устройства атмосферного воздуха создается прижимная сила между внутренними стенками трубок и гранулами, а так же уменьшение физических размеров трубок и их частичного дозированного сокращения, что исключает малейшее смещение фрагментов костей и приводит к охвату всех изгибов пораженной конечности и обеспечивает жесткую временную иммобилизацию.
По истечении заданного времени временной иммобилизации микроконтроллер 16 индицирует на дисплее 13 о завершении работы, сигнализирует с помощью звукового сигнала посредством динамика 18.
Временная иммобилизация без указания конкретного времени осуществляется до отмены режима с использованием элементов управления 14. В случае наличия неисправности датчика давления 7, или невозможности достижения заданной величины давления (за счет не герметичности корпуса 1) или скорой разрядки источника питания 15 микроконтроллер 16 сигнализирует предупреждающую информацию и информацию о неисправности на дисплее 13 и с помощью динамика 18.
Для осуществления финальной иммобилизации используется съемный модуль финальной фиксации 4. После проведения временной иммобилизации и постоянной откачки воздуха осуществляют механическое воздействие (нажатие) на съемный модуль финальной фиксации 4. Механическое воздействие разрушает диафрагмы 11 через которые из емкостей с компонентами быстроотвердевающих жидкостей 12 поступают компоненты под действием низкого давления в корпус 1, смешиваясь через неподвижный шнек 10, через ниппель вакуумный быстросъемный 6 и вакуумный разъем корпуса с резиновым уплотнением 5 смешанные жидкости поступают в корпус 1 и заполняют весь имеющийся объем. После отвердевания съемный модуль финальной фиксации 4 может быть удален, а съемный вакуумный модуль 2 и съемный терапевтический модуль 3 могут быть удалены навсегда или при необходимости после проведения терапии. Отсутствие съемных модулей 2-4 обеспечивает возможность проведения гигиены кожных покровов.
После выздоровления пациента корпус 1 удаляется механическим способом - перекусыванием участков фиксирующих трубок кусачками для снятия гипса, что позволит удалить устройство в любом травматологическом пункте.
4. Финальная иммобилизация конечности пациента с проведением терапевтических воздействий.
Осуществляется аналогично пунктам 1-3.
Вся работа осуществляется в соответствии с выбранными режимами работы и не требует ручного труда и обеспечивается простотой манипуляцией.
Устройство может быть использовано для иммобилизации конечностей в случае травм и переломов костей голени, бедра, стопы, кисти, предплечья, плеча, как временного характера, так и окончательной фиксации, в стандартные сроки достаточные для сращения неосложненного диафизарного перелома крупной трубчатой кости любой локализации.
Таким образом, устройство для циркулярной иммобилизации конечностей по заявленному техническому решению повышает скорость фиксации конечности, как временной, так и финальной, за счет сокращения необходимых операций («одел» и включил автоматическую откачку воздуха), получения актуальной информации о состоянии процесса фиксации конечности, повышение уровня гигиенического состояния кожи поврежденного участка конечности за счет наличия доступа к коже, снижение времени реабилитации за счет наличия терапевтического воздействия на поврежденный участок конечности за счет гипертермии и электростимуляции
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ лечения переломов | 1980 |
|
SU976999A1 |
| ЭЛЕКТРОНЕЙРОАДАПТИВНЫЙ СТИМУЛЯТОР (ВАРИАНТЫ), ЭЛЕКТРОДНОЕ УСТРОЙСТВО И ЭЛЕКТРОДНЫЙ МОДУЛЬ | 2007 |
|
RU2336104C1 |
| ЭЛЕКТРОНЕЙРОАДАПТИВНЫЙ СТИМУЛЯТОР (ВАРИАНТЫ), ЭЛЕКТРОДНОЕ УСТРОЙСТВО И ЭЛЕКТРОДНЫЙ МОДУЛЬ | 2007 |
|
RU2336103C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ РАЗЛИЧНЫХ СРЕД | 2023 |
|
RU2807370C1 |
| Устройство для лечения переломов лодыжек | 1988 |
|
SU1532029A1 |
| СПОСОБ ЛЕЧЕНИЯ ТРАВМ, ИХ ПОСЛЕДСТВИЙ, ОРТОПЕДИЧЕСКИХ И ДРУГИХ ПАТОЛОГИЙ И УСТРОЙСТВО ДЛЯ ЛАЗЕРОТЕРАПИИ | 2001 |
|
RU2196624C1 |
| СПОСОБ ПРОФИЛАКТИКИ РОТАЦИОННЫХ КОНТРАКТУР ПРЕДПЛЕЧЬЯ ПРИ ПЕРЕЛОМАХ ЛУЧЕВОЙ КОСТИ В ТИПИЧНОМ МЕСТЕ | 2009 |
|
RU2496531C2 |
| УСТРОЙСТВО ЗАЩИТЫ ЛИЦА ОТ ОПАСНОЙ ГАЗООБРАЗНОЙ СРЕДЫ | 2022 |
|
RU2801062C1 |
| Устройство для лечения повреждений позвоночника и отека спинного мозга | 2017 |
|
RU2681261C1 |
| ВАКУУМНЫЙ АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ВРЕМЕННОЙ ИММОБИЛИЗАЦИИ ЛОКАЛЬНЫХ УЧАСТКОВ МИОКАРДА ПРИ ОПЕРАЦИЯХ БЕЗ ОСТАНОВКИ СЕРДЦА И УСТРОЙСТВО ДЛЯ ИММОБИЛИЗАЦИИ ЛОКАЛЬНОГО УЧАСТКА МИОКАРДА | 2002 |
|
RU2216284C1 |
Изобретение относится к медицине, а именно к устройствам для циркулярной иммобилизации конечностей. Устройство включает деформируемый вакуумно-плотный корпус для обхватывания конечности с заключенным в нем гранулированным наполнителем и вакуумный насос. Корпус выполнен из полых полимерных биосовместимых трубок в виде переплетенных вакуумных полостей по типу сетки с двумя вакуумными разъемами. К одному вакуумному разъему подключен съемный вакуумный модуль, а к другому - съемный модуль финальной фиксации. Вакуумный модуль включает микроконтроллер, который соединен с источником питания, через реле вакуумного насоса соединен с двигателем вакуумного насоса, а также соединен с датчиком давления, с элементами управления, с дисплеем и с динамиком. Вакуумный модуль подключен к корпусу через последовательно соединенные быстросъемный вакуумный ниппель и ловушку в виде лабиринта и соединен посредством шины данных и шины питания с дополнительно установленным съемным терапевтическим модулем. Терапевтический модуль включает цифроаналоговый преобразователь, реле элементов Пельтье и внешние компоненты: электроды для электростимуляции, датчики температуры и элементы Пельтье. Съемный модуль финальной фиксации подключен к корпусу через последовательно соединенные быстросъемный вакуумный ниппель и неподвижный шнек. К шнеку подключены параллельно через разрушаемые диафрагмы емкости с компонентами быстротвердеющих жидкостей в объеме, достаточном для заполнения корпуса устройства. Жидкости смешиваются и подаются в вакуумную систему корпуса после механического воздействия на модуль и разрушения диафрагм. Достигается расширение функциональных возможностей при простоте исполнения устройства. 4 ил.
Устройство для циркулярной иммобилизации конечностей, включающее деформируемый вакуумно-плотный корпус для обхватывания конечности с заключенным в нем гранулированным наполнителем и вакуумный насос, отличающееся тем, что корпус выполнен из полых полимерных биосовместимых трубок, в виде переплетенных вакуумных полостей по типу сетки, с двумя вакуумными разъемами, при этом к одному вакуумному разъему подключен съемный вакуумный модуль, а к другому - съемный модуль финальной фиксации, вакуумный модуль включает микроконтроллер, который соединен с источником питания, через реле вакуумного насоса с двигателем вакуумного насоса, а также соединен с датчиком давления, с элементами управления, с дисплеем и с динамиком, при этом вакуумный модуль подключен к корпусу через последовательно соединенные быстросъемный вакуумный ниппель и ловушку в виде лабиринта и соединен посредством шины данных и шины питания с дополнительно установленным съемным терапевтическим модулем, который включает цифроаналоговый преобразователь, реле элементов Пельтье и внешние компоненты: электроды для электростимуляции, датчики температуры и элементы Пельтье; съемный модуль финальной фиксации подключен к корпусу через последовательно соединенные быстросъемный вакуумный ниппель и неподвижный шнек, к которому подключены параллельно через разрушаемые диафрагмы емкости, не менее двух, с компонентами быстротвердеющих жидкостей, в объеме, достаточном для заполнения корпуса устройства, которые смешиваются и подаются в вакуумную систему корпуса после механического воздействия на модуль и разрушения диафрагм.
| Устройство для иммобилизации | 1987 |
|
SU1507374A1 |
| ШИНА ВАКУУМНАЯ | 2001 |
|
RU2216297C2 |
| FR 2959411 B1, 20.04.2012 | |||
| US 4657003 A1, 14.04.1987 | |||
| US 6530941 B1, 11.03.2003 | |||
| US 20170095365 A1, 06.04.2017. | |||

