Изобретение относится к ракетной технике и может быть применено для разработки программно-аппаратных комплексов управления полетом, обеспечивающих повышение боевой эффективности применения самонаводящихся крылатых ракет (КР) различного назначения.
Особенностью современных ракет является широкое использование цифровой вычислительной техники. Разработаны различные варианты архитектуры цифровой системы управления. Например, обработка сигналов может проводиться в центральной бортовой цифровой вычислительной машине (БЦВМ). При распределенной архитектуре обработка проводится в цифровых вычислителях подсистем ракеты - в головке самонаведения (ГСН), двигательной установке и пр. При смешанной архитектуре совместно функционируют центральная и вычислительные машины подсистем.
Известны запатентованные технические решения по применению системы управления с БЦВМ для повышения эффективности ракетной техники. В патенте №2635757 «Способ управления прямоточным воздушно-реактивным двигателем крылатой ракеты» описаны примеры использования сигналов с датчиков агрегатов силовой (двигательной) установки (в том числе, датчиков температуры и давления топлива в баке) для выработки команд бортовым компьютером КР или электронным блоком управления прямоточным воздушно-реактивным двигателем с целью поддержания заданной высоты полета и скорости полета КР. Недостатком патента является локальное повышение качества управления КР, приводящее к повышению надежности системы управления полетом, но не к повышению эффективности поражения цели при самонаведении.
Ближайшим аналогом является способ управления крылатой ракеты при самонаведении, оснащенной головкой самонаведения (ГСН), системой управления с бортовой цифровой вычислительной машиной, двигательной (далее - силовой) установкой на жидком топливе, аэродинамическими рулями, осуществляющий прием в полете головкой самонаведения сигнала о яркости и дальности до целеподобных объектов, передачу сигнала в БЦВМ, расчет направления полета к цели и выдачу из БЦВМ сигнала управления рулями, реализованный в конструкции крылатой ракеты (см., например, «60 лет самоотверженного труда во имя мира», изд. дом «Оружие и технологии», М.: 2004, с. 77-78; http://militaryarms.ru/boepripasy/rakety/p-700, доступно на 16.07.2019). Внедрение БЦВМ, позволившей обрабатывать больший объем информации, привело к реализации функции обмена между КР в залпе информацией о наблюдаемых целеподобных объектах и, как следствие, к повышению боевой эффективности.
Тем не менее, недостатком системы управления ближайшего аналога является недостаточное использование возможностей цифровой техники для управления ракетой. Формирование залпа не учитывает рациональное управление расходом топлива - для этого ранее стартовавшие ракеты летят по более низкой траектории (с большим скоростным напором и меньшей скоростью) или огибающей траектории, позднее стартовавшие - более высокой или прямой траектории, что в итоге, снижает дальность действия всего залпа ракет; целераспределение на разнесенные по фронту и дальности объекты поражения, выбор направления полета на цель и выдача сигналов управления рулями при самонаведении проводятся без учета остатков топлива в конкретной ракете.
Техническим результатом патента является дальнейшее расширение возможностей цифровой системы управления ракетой, позволяющее, за счет комбинирования ресурсов, установки новых приборов и цифровой обработки их сигналов повысить боевую эффективность ракеты при самонаведении.
Указанный технический результат достигается тем, что в соответствии со способом самонаведения крылатой ракеты, оснащенной головкой самонаведения, системой управления с бортовой цифровой вычислительной машиной, силовой установкой с регулятором подачи жидкого топлива, управляющим положением клапана подачи топлива, аэродинамическими рулями, включающим старт и полет ракеты в область расположения цели, включение ГСН и передачу в БЦВМ сигналов о характеристиках целеподобных объектов и дальности до них, расчет в БЦВМ траектории полета к цели, выдачу из БЦВМ сигнала управления рулями, до старта или при старте крылатой ракеты закладывают в БЦВМ данные о количестве топлива в баке силовой установки, в процессе полета и до включения ГСН не реже 1 раза в секунду регулятором расхода жидкого топлива фиксируют положение клапана подачи топлива и передают данные о нем в БЦВМ для определения расхода жидкого топлива и его текущего количества, а после включения ГСН траекторию полета к цели рассчитывают с учетом текущего количества топлива.
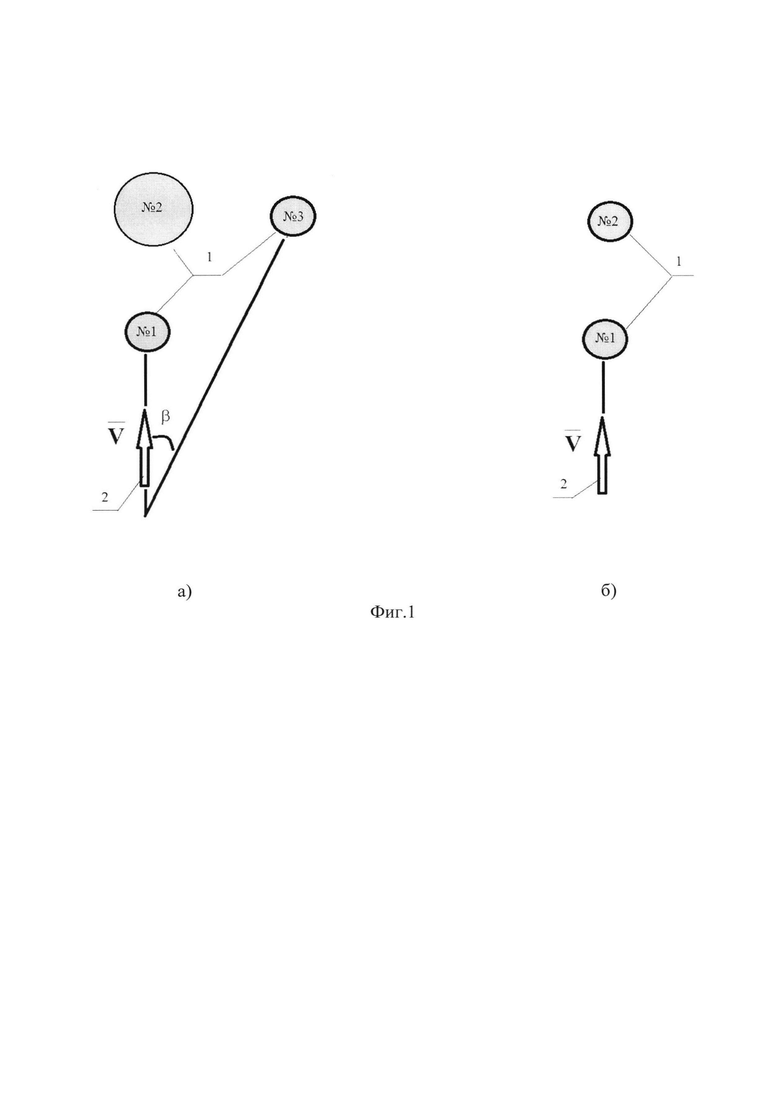
Варианты схемы реализации способа самонаведения крылатой ракеты приведены на фиг. 1.
Приняты обозначения:
1 - метки характеристик целей, например яркости, пропорциональные эффективной поверхности рассеяния (ЭПР) цели в диапазоне спектра работы ГСН, габаритам и пр., получаемые ГСН и передаваемые в БЦВМ для дальнейшей обработки и выбора направления полета на цель;
2 - крылатая ракета (направление вектора скорости);
β - направление (курс) полета на цель.
Реализация технического решения осуществляется следующим образом.
При одиночном пуске ракеты, до старта или при старте в БЦВМ закладывают данные о количестве жидкого топлива в баке силовой установки ракеты. После старта, в процессе полета до начала работы ГСН в режиме самонаведения передают в БЦВМ сигнал от регулятора подачи жидкого топлива (например, с частотой не ниже 1 раз в секунду, доступной при современном уровне развития техники). Регистрация положения клапана подачи топлива во времени позволяет постоянно оценивать расход топлива - при максимально открытом клапане расход максимальный, при частично открытом, промежуточный расчетный - и остаток топлива к заданному моменту времени.
При достижении участка обнаружения целей включают ГСН, передают в БЦВМ сигнал о характеристиках и дальности до целеподобных объектов. Наличие сигналов о характеристиках целеподобных объектов, дальности до них и данных о количестве топлива, оставшегося к моменту самонаведения, позволяют реализовать целый набор вариантов выбора направления полета к цели (траектории), например:
- при достаточном количестве топлива и одинаковых уровнях сигналов от целеподобных объектов (одинаковых ЭПР) наводить КР, поз. 2, фиг. 1а. на одну из дальних целей, например, между целями №1 и №3 выбрать цель №3, поз. 1, фиг. 1а;
- при достаточном количестве топлива наводить КР на самую крупную цель (с максимальной ЭПР) независимо от дальности до нее, повысив мощность боевой части за счет энергии топлива, например, цель №2, поз. 1, фиг. 1а;
- при недостаточном количестве топлива наводить на ближайшую цель, вне зависимости от ее характеристик, например, цель №1, фиг. 16;
- при достаточном количестве топлива - сформировать противозенитный маневр или изменить направление подлета к выбранной цели.
После выбора направления на цель (например, курса, угол β фиг. 1а), самонаведение осуществляется одним из известных методов, например, пропорционального наведения.
В случае группового старта нескольких ракет, при достижении участка обнаружения целей у каждой КР включают ГСН, передают в БЦВМ сигналы о яркости найденных целеподобных объектов и дальности до них. Наличие данных об остатке топлива, с учетом обмена информацией в группе, также позволяет реализовать набор стратегий применения группы, например:
- ракеты с минимальным запасом топлива наводят на ближайшие цели, с наибольшим запасом - на отдаленные;
- ракеты с наибольшим запасом топлива наводят на самую крупную цель (с максимальной ЭПР), повысив мощность взрыва за счет энергии топлива.
Применение технического результата позволяет повысить степень учета текущих бортовых ресурсов в полете за счет использования цифровой вычислительной техники, и, как результат, повысить эффективность боевого применения крылатой ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ | 2017 |
|
RU2713546C2 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| УНИВЕРСАЛЬНАЯ ПО ЦЕЛЯМ КРЫЛАТАЯ РАКЕТА И СПОСОБЫ ПОРАЖЕНИЯ ЦЕЛЕЙ | 2015 |
|
RU2622051C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2225975C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ СВЕРХЗВУКОВОЙ КРЫЛАТОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569971C1 |
| Способ поражения цели сверхзвуковой крылатой ракетой и сверхзвуковая крылатая ракета для его осуществления | 2016 |
|
RU2644962C2 |
| СПОСОБ ПОЛЕТА ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2014 |
|
RU2544447C1 |
Изобретение относится к ракетной технике и может быть применено для разработки программно-аппаратных комплексов управления полетом, обеспечивающих повышение боевой эффективности применения самонаводящихся крылатых ракет различного назначения. Технический результат – повышение боевой эффективности ракеты при самонаведении. По способу применяют крылатую ракету. Ее оснащают головкой самонаведения - ГСН, системой управления с бортовой цифровой вычислительной машиной - БЦВМ, силовой установкой с регулятором подачи жидкого топлива, управляющим положением клапана подачи топлива, аэродинамическими рулями. Включают старт ракеты и обеспечивают ее полет в область расположения цели. Включают ГСН и передают в БЦВМ сигналы о характеристиках целеподобных объектов и дальности до них. Осуществляют расчет с помощью БЦВМ траектории полета к цели и получают от БЦВМ сигналы управления рулями. При этом до старта или при старте крылатой ракеты закладывают в БЦВМ данные о количестве топлива в баке силовой установки. В процессе полета и до включения ГСН не реже 1 раза в секунду регулятором расхода жидкого топлива фиксируют положение клапана подачи топлива и передают данные о нем в БЦВМ для определения расхода жидкого топлива и его текущего количества. После включения ГСН траекторию полета к цели рассчитывают с учетом текущего количества топлива. При достаточном количестве топлива и при одинаковых уровнях сигналов от целеподобных объектов крылатую ракету наводят на одну из дальних целей или на самую крупную цель с максимальной эффективной поверхностью рассеяния независимо от дальности, или формируют противозенитный маневр, или изменяют направление подлета к ближайшей цели. При недостаточном количестве топлива крылатую ракету наводят на ближайшую цель. 1 ил.
Способ самонаведения крылатой ракеты, оснащенной головкой самонаведения - ГСН, системой управления с бортовой цифровой вычислительной машиной - БЦВМ, силовой установкой с регулятором подачи жидкого топлива, управляющим положением клапана подачи топлива, аэродинамическими рулями, включающий старт и полет ракеты в область расположения цели, включение ГСН и передачу в БЦВМ сигналов о характеристиках целеподобных объектов и дальности до них, расчет с помощью БЦВМ траектории полета к цели и выдачу из БЦВМ сигнала управления рулями, отличающийся тем, что до старта или при старте крылатой ракеты закладывают в БЦВМ данные о количестве топлива в баке силовой установки, в процессе полета и до включения ГСН не реже 1 раза в секунду регулятором расхода жидкого топлива фиксируют положение клапана подачи топлива и передают данные о нем в БЦВМ для определения расхода жидкого топлива и его текущего количества, а после включения ГСН траекторию полета к цели рассчитывают с учетом текущего количества топлива, при этом при достаточном количестве топлива и при одинаковых уровнях сигналов от целеподобных объектов крылатую ракету наводят на одну из дальних целей или на самую крупную цель с максимальной эффективной поверхностью рассеяния независимо от дальности, или формируют противозенитный маневр, или изменяют направление подлета к ближайшей цели, а при недостаточном количестве топлива крылатую ракету наводят на ближайшую цель.
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
| КРЫЛАТАЯ РАКЕТА | 2007 |
|
RU2352892C2 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ РАКЕТ С ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 1997 |
|
RU2113679C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННЫМ ВОЗДУШНО-РЕАКТИВНЫМ ДВИГАТЕЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646020C1 |
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2225975C1 |
| US 5096139 A1, 17.03.1992. | |||

