Область техники, к которой относится изобретение
Изобретение относится к области подводной техники, используемой для обслуживания и периодического осмотра поверхностей подводной части гидротехнической инфраструктуры, а именно к телеуправляемым подводным робототехническим системам, обеспечивающим высокоточное обследование, в том числе с применением методов неразрушающего контроля, профилирование подводных протяженных, преимущественно вертикально расположенных поверхностей объектов.
Уровень техники
В действующем стандарте СТО РусГидро 02.01.109 3013 подробно изложены требования к выполнению подводно-технического обследования гидротехнических сооружений (ГТС). Стандарт устанавливает высокие требования к проведению подводно-технического обследования состояния поверхностей гидротехнических сооружений гидроэлектрических станций и примыкающих к ним со стороны верхнего и нижнего бьефов участков неукрепленных русел, к объему и качеству информации, получаемой в результате обследования, а также к составу и организации работ по проведению подводно-технического обследования. Главной задачей подводного обследования является своевременное обнаружение дефектов и повреждений элементов конструкции ГТС, а также наличие посторонних предметов, влияющих на снижение эксплуатационной надежности сооружений. Обследование подводных частей гидротехнических сооружений должно производиться с охватом 100% их поверхности.
В существующей практике для обследования ГТС на сегодняшний день используют многолучевые эхолоты (МЛЭ). Наличие опции сверхвысокого разрешения (UHR) и возможности фокусировки лучей позволяют получить детальную информацию о находящихся на дне объектах (Дунчевская С.В., Возможности выполнения подводно-технических обследований ГТС в соответствии со стандартом СТО «РУСГИДРО» с применением современных технических средств. Гидротехника, 2015, 3 (40), с. 37-39).
Многолучевой эхолокатор включает в себя следующие составные части: процессор гидролокатора, приемопередающий блок, антенну гидролокатора. Соединительный кабель от процессора к приемопередатчику передает напряжение питания, обеспечивает сигнальный и управляющий интерфейс между процессором гидролокатора и приемопередающим блоком. Антенна гидролокатора со встроенными сигнальными и управляющими кабелями передает акустические импульсы через передающую решетку (излучатель). Принимает отраженные акустические импульсы через приемную решетку (гидрофон). Усиливает в предусилителе полученный сигнал от гидрофона и посылает его на приемопередающий блок. Усиленный сигнал гидрофона мультиплексируется и подается в процессор гидролокатора для обработки и формирования луча. Процессор гидролокатора генерирует видеосигнал, отображаемый на мониторе и функционирует как управляющий интерфейс между оператором и гидролокатором (Многолучевой эхолот-гидролокатор с функцией гидролокатора бокового обзора. Руководство по эксплуатации. Утверждена ВШАЕ.361192.001 РЭ-ЛУ, 2005). Недостатками данной конструкции является то, что детализация съемки падает с глубиной из-за расходимости акустического луча, а точность привязки к объекту уменьшается с глубиной из-за рефракции акустического луча на температурных градиентах среды. Ярким примером является ситуация с обследованием Саяно-Шушенской ГЭС (глубина >200 м). На глубине верхнего бьефа современные гидролокационные средства с лучом 0.3-0.5° способны обнаружить дефект подводной конструкции, если его линейный размер превосходит 2 метра.
Наиболее близким техническим решением к заявленному изобретению является устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений в виде гидравлического 3D-гидролокатора Blue View BV5000-1350 и BV5000-2250, который создает разрешение изображения подводных областей, сооружений и объектов. Данный 3D механический сканирующий сонар создает трехмерные облака точек в подводной исследуемой области. Компактное, легкое устройство легко устанавливается на штатив или на дистанционно управляемый аппарат (ROV). Сканирующая головка гидролокатора и встроенный механический механизм поворота и наклона Nism генерирует как секторное сканирование, так и данные сферического сканирования (BV5000 3D Mechanical Scanning Sonar, найдено 02.12.2019 в Интернет по адресу: http://www.teledynemarine.com/blog/BV5000-3D-Mechanical-Scanning-Sonar). Недостатками данного устройства является низкая эффективность дефектоскопии подводных вертикальных гидротехнических сооружений в связи с высокой вероятностью зацепов телеуправляемого необитаемого подводного аппарата (ТНПА), невозможностью точной привязки изображения к объекту и в связи с требованием к высокой квалификации телеоператора ROV.
Сущность изобретения
Технический результат заявленного изобретения заключается в расширении арсенала технических средств, предназначенных для внешней дефектоскопии подводных вертикальных гидротехнических сооружений с высокой детализацией изображения при выполнении съемки на глубине, а также возможности более точной привязки изображения к объекту за счет конструктивных элементов устройства.
Технический результат достигается тем, что создано устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений, содержащее гидролокатор, причем оно содержит последовательное тросовое соединение якоря, подвижного носителя и плавающего буя, создавая тросовую линию, при этом якорь и плавающий буй размещены на концах тросовой линии, а плавающий буй снабжен блоком управления, аккумуляторной батареей, согласованной парой горизонтальных движителей, модулем навигации глобальной спутниковой системы позиционирования и антенной Wi-Fi, предназначенной для передачи гидроакустической информации оператору и приема от него управляющих команд, причем аккумуляторная батарея, модуль навигации глобальной спутниковой системы позиционирования и антенна Wi-Fi соединены с входами блока управления, а пара горизонтальных движителей буя соединена с выходами блока управления, подвижный носитель установлен на тросе с возможностью движения по тросовой линии и снабжен гидролокатором с переключаемой рабочей частотой, центральным управляющим компьютером, инерциальной измерительной системой, вертикальным движителем для вертикального движения подвижного носителя и согласованной парой горизонтальных движителей, предназначенных для углового ориентирования подвижного носителя вокруг вертикальной оси тросовой линии, при этом центральный управляющий компьютер выполнен с возможностью принятия команд от блока управления через многожильный подводный кабель и выработки команд управления через соединенные с ним электрически вертикальный движитель, согласованную пару горизонтальных движителей подвижного носителя, инерционную измерительную систему и гидролокатор с переключаемой рабочей частотой, который также соединен через многожильный подводный кабель с блоком управления и антенной Wi-Fi.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
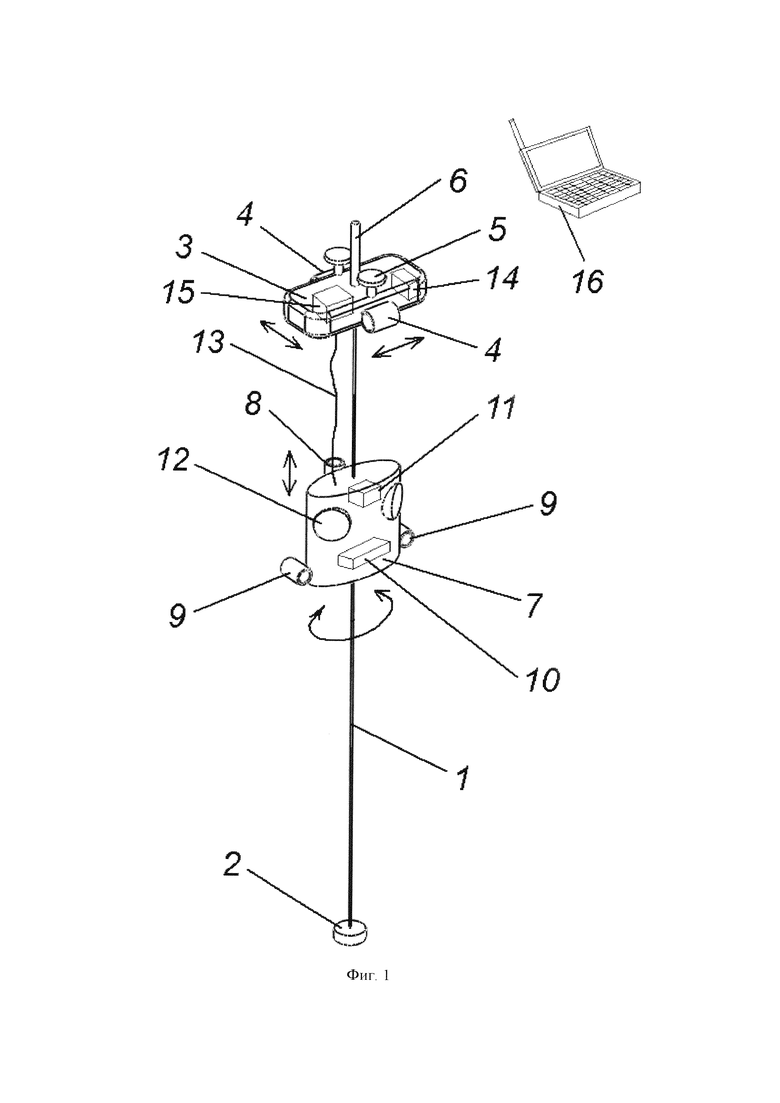
На фиг. 1 представлен общий вид устройства для внешней дефектоскопии подводных вертикальных гидротехнических сооружений;
На фиг. 2 представлена общая схема устройства;
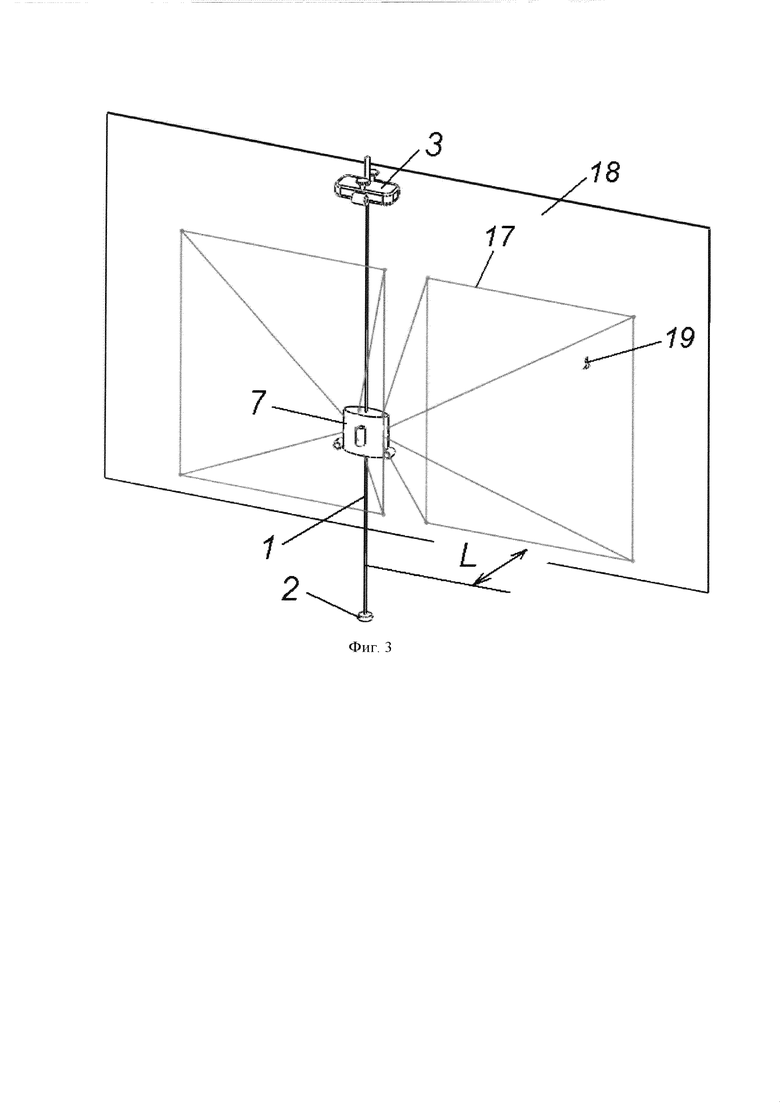
На фиг. 3 представлена установка тросовой линии устройства от стенки гидротехнического сооружения;
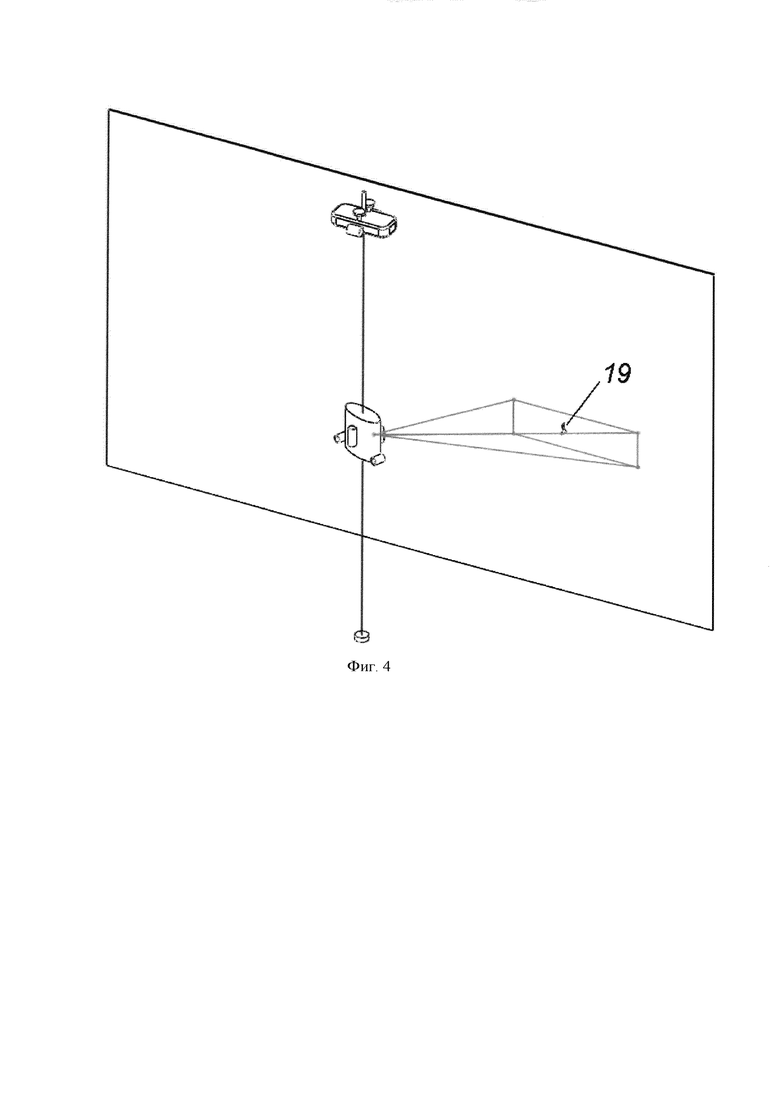
На фиг. 4 представлено переключение гидролокатора устройства в режим повышенной разрешающей способности.
Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений (см. фиг. 1, 2) содержит тросовую линию 1, якорь 2, плавающий буй 3 и подвижный носитель 7. Последовательное тросовое соединение якоря 2, подвижного носителя 7 и плавающего буя 3 создают тросовую линию 1. Причем плавающий буй 3 содержит согласованную пару горизонтальных движителей 4, модуль навигации глобальной спутниковой системы позиционирования 5, антенну Wi-Fi 6, а также он содержит аккумуляторную батарею 15 и блок управления 14. Антенна Wi-Fi 6 предназначена для организации передачи гидроакустической информации оператору через рабочее место оператора 16 и приема от него управляющих команд. Входы блока управления 14 соединены с модулем навигации глобальной спутниковой системы позиционирования 5, антенной Wi-Fi 6, аккумуляторной батареей 15 и многожильным подводным кабелем 13. Выходы блока управления соединены с антенной Wi-Fi 6, согласованной парой горизонтальных движителей 4 и с многожильным подводным кабелем 13.
Подвижный носитель 7 установлен с возможностью движения по тросовой линии 1 и снабжен вертикальным движителем 8 для вертикального движения подвижного носителя 7 и согласованной парой горизонтальных движителей 9, для углового ориентирования вокруг вертикальной оси тросовой линии подвижного носителя 7. Кроме того подвижный носитель 7 снабжен центральным управляющим компьютером 10, инерциальной измерительной системой 11 и гидролокатором с переключаемой рабочей частотой 12. При этом входы центрального управляющего компьютера 10 соединены с многожильным подводным кабелем 13 и инерциальной измерительной системой 11. Выходы управляющего компьютера 10 соединены с вертикальным движителем 8, согласованной парой горизонтальных движителей 9 подвижного носителя 7 и гидролокатором 12. Гидролокатор с переключаемой рабочей частотой 12 также соединен через многожильный подводный кабель с блоком управления 14 и антенной Wi-Fi 6. Передача гидроакустической информации гидролокатора с переключаемой рабочей частотой 12 производится через многожильный подводный кабель 13 и блок управления 14 и далее через антенну Wi-Fi 6 на рабочее место оператора 16.
Подробное описание осуществления изобретения
Устройство функционирует следующим образом (см. фиг. 1, 2, 3,4).
Тросовую линию 1 устройства устанавливают вертикально с помощью якоря 2 и плавающего буя 3 на расстоянии L от стенки гидротехнического сооружения 18 (см. фиг. 3). Включают систему автоматического горизонтального позиционирования подвижного буя 3. Оператор через рабочее место оператора 16 беспроводно и антенну WiFi 6 подает команды на включение гидролокатора с переключаемой рабочей частотой 12 в обычный режим и выполняет вертикальное движение подвижного носителя 7 подачей команд на вертикальный движитель 8 до обнаружения в поле зрения 17 дефекта гидротехнического сооружения 19.
В процессе работы устройства согласованные пары горизонтальных движителей 4 и 9, представляющие собой пары импеллерных водометных движителей с приводом от электродвигателей, создают по соответствующим командам прямой или реверсный вектор силы тяги каждый вдоль своих осей. В частности пара горизонтальных движителей 4 буя 3 путем различных комбинаций векторов силы тяги осуществляет движение плавающего буя 3 вперед, назад, вправо и влево, создавая тем самым его управляемое горизонтальное позиционирование на поверхности воды.
Координаты заданной точки передает оператор в блок управления 14 через рабочее место оператора 16 и антенну WiFi 6. Автоматическое горизонтальное позиционирование буя выполняется согласованной парой горизонтальных движителей 4 по командам, вырабатываемым блоком управления 14 на основе заданных оператором координат точки позиционирования и текущей навигационной информации из модуля навигации глобальной спутниковой системы позиционирования 5.
Вертикальное движение подвижного носителя 7 осуществляют прямым или реверсным включением вертикального движителя 8 по командам, поступающим от оператора через рабочее место оператора 16, антенну WiFi 6, блок управления 14, многожильный подводный кабель 13 и центральный управляющий компьютер 10. При этом повороты подвижного носителя 7 вокруг оси тросовой линии 1 осуществляют согласованной парой горизонтальных движителей 9 также по командам, поступающим от оператора через рабочее место оператора 16, антенну WiFi 6, блок управления 14, многожильный подводный кабель 13 и центральный управляющий компьютер 10.
Кроме того подвижный носитель 7 имеет систему автоматической угловой стабилизации вокруг оси тросовой линии, состоящую из инерциальной измерительной системы 11, центрального управляющего компьютера 10, согласованной пары горизонтальных движителей 9. Различными комбинациями векторов силы тяги, создаваемых в паре горизонтальных движителей 9, осуществляют необходимый управляемый поворот подвижного носителя 7 вокруг оси тросовой линии 1 вправо и влево. Заданное угловое положение подвижного носителя 7 вокруг оси тросовой линии передает оператор через рабочее место оператора 16 в центральный управляющий компьютер 10, антенну WiFi 6, блок управления 14 и многожильный подводный кабель 13. Автоматическую угловую стабилизацию подвижного носителя 7 вокруг оси тросовой линии 1 выполняют согласованной парой горизонтальных движителей 9 по командам, вырабатываемым центральным управляющим компьютером 10 на основе заданного оператором углового положения подвижного носителя 7 и текущей информации об угловом положении от инерциальной измерительной системы 11.
Гидролокатор с переключаемой рабочей частотой 12 установлен на подвижном носителе 7, причем он выполнен с возможностью работы в двух режимах: обычный с рабочей частотой 200-350 кГц (с угловым полем зрения 60 градусов) и повышенной разрешающей способности с рабочей частотой 500-800 кГц (с угловым полем зрения 30 градусов). Гидроакустическое изображение от гидролокатора с переключаемой рабочей частотой 12 поступает через многожильный кабель 13, блок управления 14, антенну WiFi 6 на рабочее место оператора 16. Команды на включение или выключение гидролокатора с переключаемой рабочей частотой 12 и на выбор режима его работы поступают от оператора через рабочее место оператора 16, антенну WiFi 6, блок управления 14 и многожильный подводный кабель 13.
Пример использования.
Тросовую линию 1 устройства устанавливают вертикально с помощью якоря 2 и плавающего буя 3 на расстоянии L от стенки гидротехнического сооружения 18 (см. фиг. 3). Включают систему автоматического горизонтального позиционирования подвижного буя 3 в точку, находящуюся точно над якорем 2. Оператор подает команды на включение гидролокатора с переключаемой рабочей частотой 12 в обычный режим и выполняет вертикальное движение подвижного носителя 7 подачей команд на вертикальный движитель 8 до обнаружения в поле зрения 17 дефекта гидротехнического сооружения 19.
Далее оператор, подавая команды на поворот подвижного носителя 7 согласованной парой горизонтальных движителей 9 подвижного носителя 7 и на вертикальный движитель 8, наводит центр поля зрения гидролокатора с переключаемой рабочей частотой 12 на дефект гидротехнического сооружения 19.
Затем оператор переключает гидролокатор с переключаемой рабочей частотой 12 в режим повышенной разрешающей способности (при этом угловое поле гидролокатора уменьшается, но разрешающая способность на исследуемой поверхности увеличивается) для детального изучения и регистрации дефекта гидротехнического сооружения 19 (см. фиг. 4). Все время исследования дефекта гидротехнического сооружения 19, системы автоматического горизонтального позиционирования плавающего буя 3 в заданной точке и автоматической угловой стабилизации подвижного носителя 7 вокруг оси тросовой линии, совместно обеспечивают заданное оператором пространственное угловое положение поля зрения гидролокатора с переключаемой рабочей частотой 12, противодействуя течениям и иным гидродинамическим помехам, что позволяет иметь высокую детализацию изображения и более точную привязку изображения к объекту при выполнении съемки на глубине.
Таким образом, заявленное устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений обеспечивает за счет своих конструктивных элементов высокую детализацию изображения при выполнении съемки на глубине и более точную привязку изображения к объекту.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обследования гидротехнических сооружений | 2021 |
|
RU2769439C1 |
| Многофункциональное устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2021 |
|
RU2760985C1 |
| Подвижный подводный носитель, оснащенный системой горизонтальной угловой стабилизации относительно вертикальных плоскостных гидротехнических сооружений | 2020 |
|
RU2739871C1 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |

Изобретение относится к области подводной техники, используемой для обслуживания и периодического осмотра поверхностей подводной части гидротехнической инфраструктуры, а именно к телеуправляемым подводным робототехническим системам, обеспечивающим высокоточное обследование, в том числе с применением методов неразрушающего контроля, профилирование подводных протяженных, преимущественно вертикально расположенных поверхностей объектов. Создано устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений, содержащее последовательное тросовое соединение якоря, подвижного носителя и плавающего буя, создавая тросовую линию. При этом якорь и плавающий буй размещены на концах тросовой линии, а плавающий буй снабжен блоком управления, аккумуляторной батареей, согласованной парой горизонтальных движителей, модулем навигации глобальной спутниковой системы позиционирования и антенной Wi-Fi, предназначенной для передачи гидроакустической информации оператору и приема от него управляющих команд. Причем аккумуляторная батарея, модуль навигации глобальной спутниковой системы позиционирования и антенна Wi-Fi соединены с входами блока управления, а пара горизонтальных движителей буя соединена с выходами блока управления. Подвижный носитель установлен на тросе с возможностью движения по тросовой линии и снабжен гидролокатором с переключаемой рабочей частотой, центральным управляющим компьютером, инерциальной измерительной системой, вертикальным движителем для вертикального движения подвижного носителя и согласованной парой горизонтальных движителей, предназначенных для углового ориентирования подвижного носителя вокруг вертикальной оси тросовой линии. При этом центральный управляющий компьютер выполнен с возможностью принятия команд от блока управления через многожильный подводный кабель и выработки команд управления через соединенные с ним электрически вертикальный движитель, согласованную пару движителей подвижного носителя, инерционную измерительную систему и гидролокатор с переключаемой рабочей частотой, который также соединен через многожильный подводный кабель с блоком управления и антенной Wi-Fi. Технический результат заявленного изобретения заключается в расширении арсенала технических средств, предназначенных для внешней дефектоскопии подводных вертикальных гидротехнических сооружений с высокой детализацией изображения при выполнении съемки на глубине, а также возможности более точной привязки изображения к объекту. 4 ил.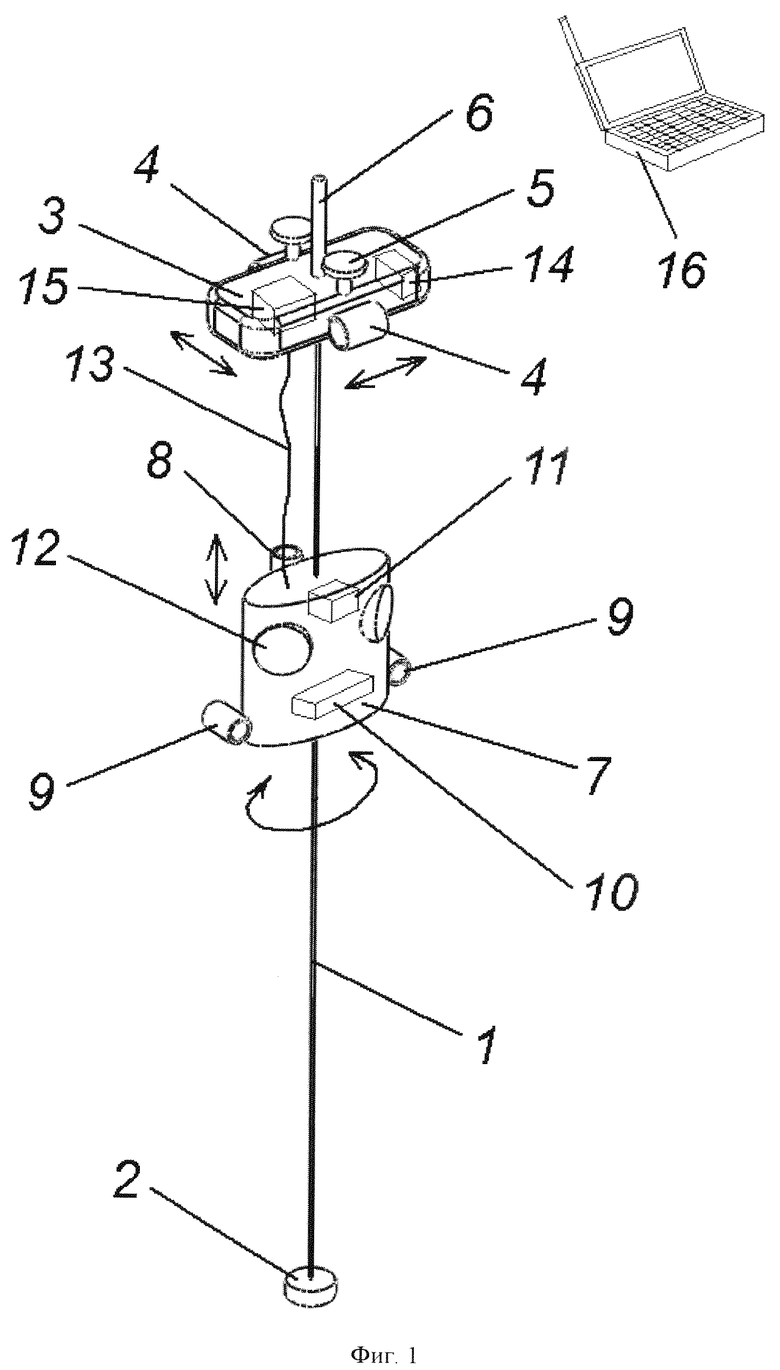
Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений, содержащее гидролокатор, отличающееся тем, что оно содержит последовательное тросовое соединение якоря, подвижного носителя и плавающего буя, создавая тросовую линию, при этом якорь и плавающий буй размещены на концах тросовой линии, а плавающий буй снабжен блоком управления, аккумуляторной батареей, согласованной парой горизонтальных движителей, модулем навигации глобальной спутниковой системы позиционирования и антенной Wi-Fi, предназначенной для передачи гидроакустической информации оператору и приема от него управляющих команд, причем аккумуляторная батарея, модуль навигации глобальной спутниковой системы позиционирования и антенна Wi-Fi соединены с входами блока управления, а пара горизонтальных движителей буя соединена с выходами блока управления, подвижный носитель установлен на тросе с возможностью движения по тросовой линии и снабжен гидролокатором с переключаемой рабочей частотой, центральным управляющим компьютером, инерциальной измерительной системой, вертикальным движителем для вертикального движения подвижного носителя и согласованной парой горизонтальных движителей, предназначенных для углового ориентирования подвижного носителя вокруг вертикальной оси тросовой линии, при этом центральный управляющий компьютер выполнен с возможностью принятия команд от блока управления через многожильный подводный кабель и выработки команд управления через соединенные с ним электрически вертикальный движитель, согласованную пару горизонтальных движителей подвижного носителя, инерционную измерительную систему и гидролокатор с переключаемой рабочей частотой, который также соединен через многожильный подводный кабель с блоком управления и антенной Wi-Fi.
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| СПОСОБ ЗАЩИТЫ КАРЬЕРОВ ЛЕГКОРАСТВОРИМЫХ СОЛЕЙ ОТ ПОДЗЕМНЫХ МИНЕРАЛИЗОВАННЫХ ВОД | 1955 |
|
SU110065A1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| CN 104090579 B, 15.08.2017 | |||
| CN 105223577 B, 28.07.2017 | |||
| CN 204374415 U, 03.06.2015. | |||

