Изобретение относится к области подводной техники, используемой для обследования, обслуживания и периодического осмотра поверхностей гидротехнических сооружений, а именно к телеуправляемым подводным робототехническим системам, обеспечивающим высокоточное обследование, в том числе с применением методов неразрушающего контроля, профилирование подводных протяженных и размещенных в зоне переменного уровня воды поверхностей объектов.
В результате проведенного патентного поиска были обнаружены устройства, применяемые для решения подобного рода задач, которые можно рассматривать в качестве аналогов предполагаемого устройства.
Известна «Универсальная самоходная спускаемая система обследования и ремонта объектов гидротехнической инфраструктуры» (патент РФ на изобретение RU 2468960 С1) - [1]. Универсальная самоходная спускаемая система обследования и ремонта объектов гидротехнической инфраструктуры представляет собой подводную подсистему в виде телеуправляемого носителя с возможностью размещения на нем манипуляционного или исследовательского модуля, а также модуля выполнения технических работ. Недостатком аналога является сложность обследования гидротехнических сооружений с помощью указанной системы за счет массивности телеуправляемого носителя, что не в полной мере позволяет применить указанную систему между близко размещенных относительно друг друга конструкций гидротехнических сооружений.
Известны «Способ и система контроля состояния конструкций» (патент РФ на изобретение RU 2683369 С2) - [2]. Система контроля состояния конструкций представляет собой измерительный модуль, установленный на контролируемом элементе конструкции, обеспечивающий возможность измерения угловых и линейных смещений контролируемого элемента конструкции. Недостатком известной системы является значительное увеличение продолжительности обследования протяженных объектов, поскольку установка системы осуществляется на контролируемом элементе конструкции, а также невозможность использования устройства для обследования гидротехнических сооружений, в том числе под водой, а также отсутствие возможности измерения теплового потока, проходящего через обследуемый объект, что не позволяет в полной мере проанализировать изменение протекания физико-химических процессов.
Известно «Устройство контроля технического состояния строительных конструкций» (патент РФ на изобретение RU 1940241 U1) - [3], которое представляет собой устройство в защитном корпусе, которое содержит пузырьковый уровень и веб-камеру, размещенные в светонепроницаемом отсеке таким образом, чтобы пузырьковый уровень полностью присутствовал в кадре, а также блок обработки и хранения фотоизображения. Устройство используется для оценки и прогнозирования технического состояния судоходных шлюзов, причальных сооружений, мостовых опор, конструкций зданий и других строительных сооружений по результатам измерения уклона их отдельных частей относительно горизонтальной плоскости. Недостатком известной системы является отсутствие возможности ориентирования в пространстве под водой за счет использования гидролокатора и возможности контроля состояния конструкций иными способами кроме визуального осмотра через технические средства видеонаблюдения (видеокамерой).
Известно «Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений» (патент РФ на изобретение RU 2724156 С1) - [4], которое является наиболее близким к разработанному авторами устройству, поэтому указанное изобретение было принято в качестве прототипа заявленного технического решения.
Недостатком указанного устройства является отсутствие возможности контроля прочности конструкций неразрушающими методами контроля прочности, определения отклонений пространственного положения строительных конструкций, отсутствие возможности видеофиксации дефектов, возникающих в процессе эксплуатации, отсутствие возможности оценки эффективности электрохимической защиты от коррозии металлических элементов конструкций гидротехнических сооружений.
Задача, на решение которой направлено заявленное изобретение, заключается в повышении эффективности эксплуатации гидротехнических сооружений посредством контроля над изменением технического состояния подводных и находящихся в зоне переменного уровня воды строительных конструкций оградительных, причальных, берегоукрепительных и судоподъемных гидротехнических сооружений.
Технический результат, который реализуется при использовании предложенного технического решения, заключается в повышении достоверности определения технического состояния строительных конструкций гидротехнических сооружений различного функционального назначения на основе контроля физических параметров и расширения возможностей применения известного устройства, которое заключается в добавлении новых функциональных опций - ультразвуковой контроль прочности строительных конструкций, определение отклонений между сооружениями и измерение зазоров между конструкциями гидротехнических сооружений, определение толщины металлических конструкций под водой, определение электродных потенциалов коррозии металлических конструкций, обследование дна акваторий.
Сущность заявленного устройства для обследования гидротехнических сооружений состоит в том, что известное устройство содержит гидролокатор, тросовую линию, состоящую в последовательном соединении якоря, подвижного носителя и плавающего буя, а плавающий буй снабжен блоком управления, аккумуляторной батареей, согласованной парой горизонтальных движителей, модулем навигации глобальной спутниковой системы позиционирования и антенной Wi-Fi, предназначенной для передачи гидроакустической информации оператору и приема от него управляющих команд, причем аккумуляторная батарея, модуль навигации глобальной спутниковой системы позиционирования и антенна Wi-Fi соединены с входами блока управления, а пара горизонтальных движителей буя соединена с выходами блока управления, подвижный носитель установлен на тросе с возможностью движения по тросовой линии и снабжен гидролокатором с переключаемой рабочей частотой, центральным управляющим компьютером, инерциальной измерительной системой, вертикальным движителем для вертикального движения подвижного носителя и согласованной парой горизонтальных движителей, предназначенных для углового ориентирования подвижного носителя вокруг вертикальной оси тросовой линии, при этом центральный управляющий компьютер выполнен с возможностью принятия команд от блока управления через многожильный подводный кабель и выработки команд управления через соединенные с ним электрически вертикальный движитель, согласованную пару горизонтальных движителей подвижного носителя, инерционную измерительную систему и гидролокатор с переключаемой рабочей частотой, который также соединен через многожильный подводный кабель с блоком управления и антенной Wi-Fi.
При этом устройство дополнительно снабжено:
блоком ультразвукового контроля прочности конструкций, блоком контроля угловых значений, видеокамерой, ультразвуковым подводным толщиномером, блоком подводного измерения электродных потенциалов, модулем хранения видеоданных, регулируемым электроприводом, навигационным приборным узлом, содержащим блок регистрации показаний, компас, уклономер, секундомер, глубиномер.
При этом,
блок ультразвукового контроля прочности конструкций размещен на подвижном носителе, соединен с входом блока управления, входом центрального управляющего компьютера и многожильным подводным кабелем;
блок контроля угловых значений размещен на подвижном носителе, соединен с навигационным приборным узлом через блок регистрации показаний, с входом блока управления и сообщается с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
видеокамера размещена на подвижном носителе, соединена с входом блока управления и сообщается с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
ультразвуковой подводный толщиномер размещен на подвижном носителе, соединен с входом блока управления и сообщается с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
блок подводного измерения электродных потенциалов размещен на подвижном носителе, соединен с входом блока управления и сообщается с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
модуль хранения видеоданных размещен на плавающем буе, соединен с выходом блока управления;
регулируемый электропривод размещен на плавающем буе, соединен с выходом блока управления;
навигационный приборный узел, содержащий блок регистрации показаний, компас, уклономер, секундомер, глубиномер, размещен на подвижном носителе, сообщается с центральным управляющим компьютером и блоком управления через блок регистрации показаний и многожильный подводный кабель.
Отличительными признаками заявленного устройства для обследования гидротехнических сооружений являются: 1. дополнительное снабжение блоком ультразвукового контроля прочности конструкций, блоком контроля угловых значений, видеокамерой, ультразвуковым подводным толщиномером, блоком подводного измерения электродных потенциалов, модулем хранения видеоданных, регулируемым электроприводом, навигационным приборным узлом, содержащим блок регистрации показаний, компас, уклономер, секундомер, глубиномер;
2. размещение блока ультразвукового контроля прочности конструкций на подвижном носителе, соединение с входом блока управления, входом центрального управляющего компьютера и многожильным подводным кабелем;
3. размещение блока контроля угловых значений на подвижном носителе, соединение с навигационным приборным узлом через блок регистрации показаний, с входом блока управления и сообщение с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
4. размещение видеокамеры на подвижном носителе, соединение с входом блока управления и сообщение с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
5. размещение ультразвукового подводного толщиномера на подвижном носителе, соединение с входом блока управления и сообщение с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
6. размещение блока подводного измерения электродных потенциалов на подвижном носителе, соединение с входом блока управления и сообщение с центральным управляющим компьютером через соединение с многожильным подводным кабелем;
7. размещение модуля хранения видеоданных на плавающем буе и соединение с выходом блока управления;
8. размещение регулируемого электропривода на плавающем буе и соединение с выходом блока управления;
9. размещение навигационного приборного узла, содержащего блок регистрации показаний, компас, уклономер, секундомер, глубиномер, на подвижном носителе, сообщение с центральным управляющим компьютером и блоком управления через блок регистрации показаний и многожильный подводный кабель.
По сведениям, имеющимся у авторов, совокупность отличительных признаков не известна в технической литературе, что отвечает условию патентоспособности «новизна».
Совместное применение в заявляемом устройстве указанных отличительных признаков №1…9 позволяет получить положительный эффект, который заключается в том, что расширяется область применения устройства, т.к. оно может быть применено для обследования состояния конструкций гидротехнических сооружений различного функционального назначения (оградительных, причальных, берегоукрепительных и судоподъемных и других) на основе контроля физических параметров конструкций и посредством расширения возможностей предлагаемого технического решения - возможности определения отклонений между сооружениями и измерения зазоров между конструкциями гидротехнических сооружений, возможности определения толщины металлических конструкций под водой, возможности обследования дна акваторий, возможности ультразвуковой контроль прочности строительных конструкций и других.
Заявленное техническое решение представлено в графических материалах.
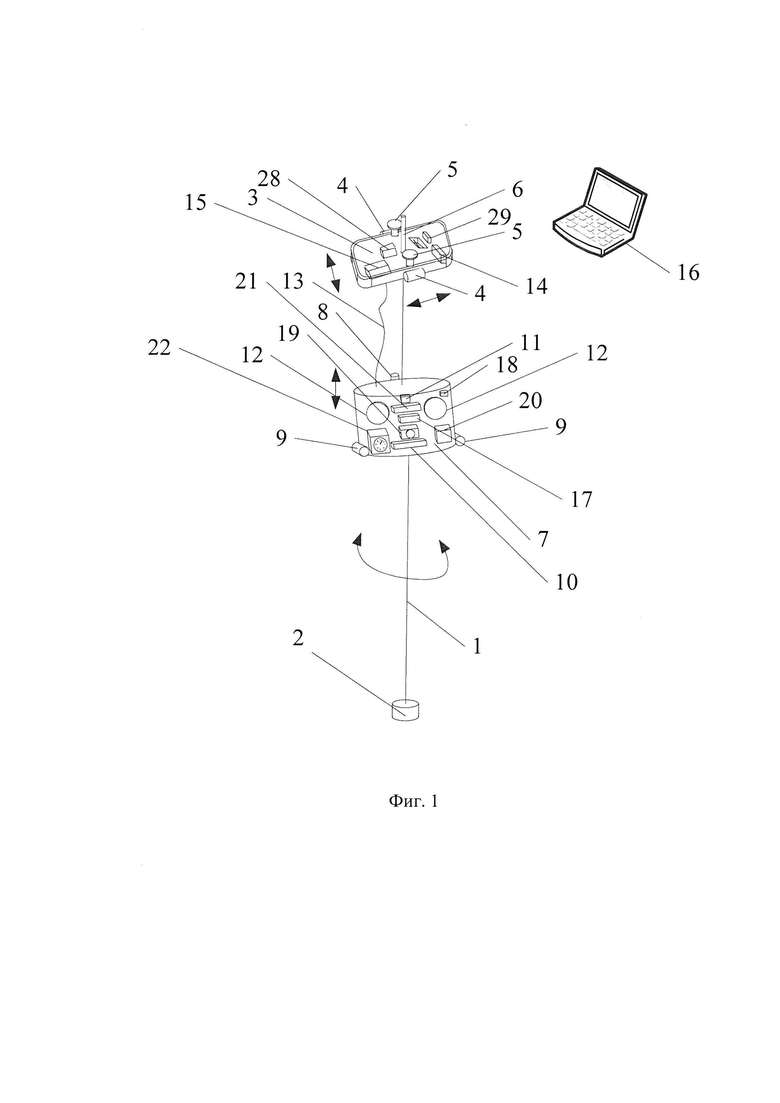
На фигуре 1 представлен общий вид устройства для обследования гидротехнических сооружений.
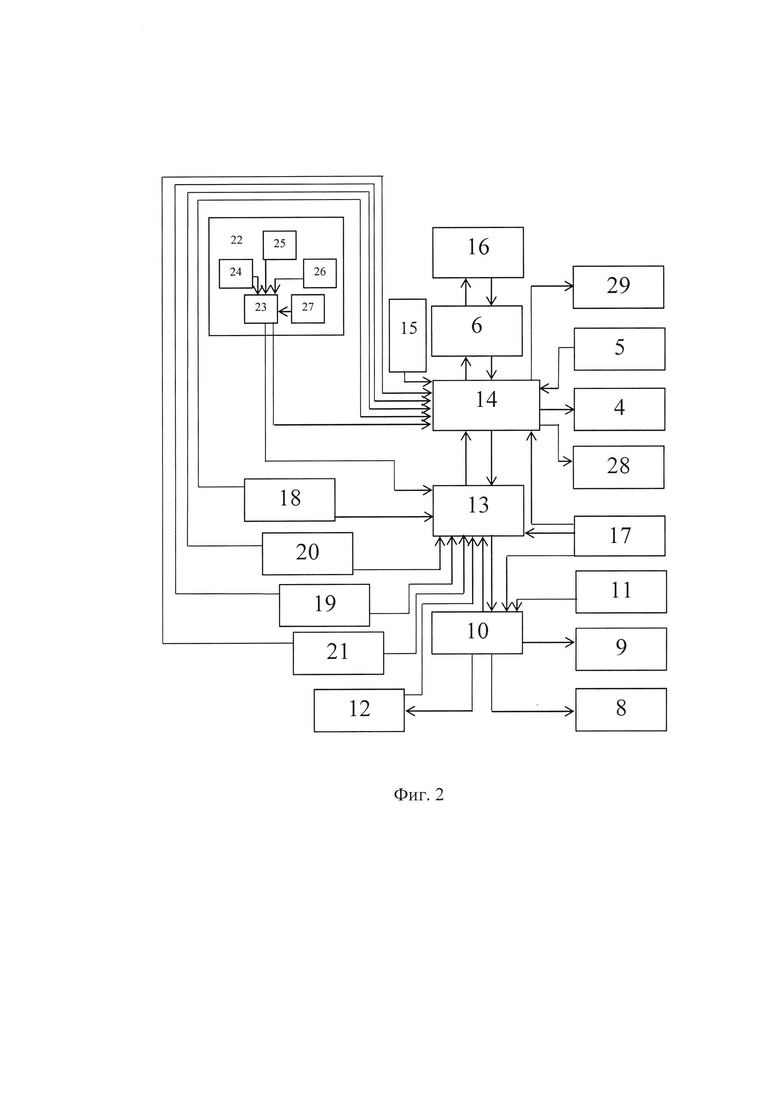
На фигуре 2 представлена общая схема устройства.
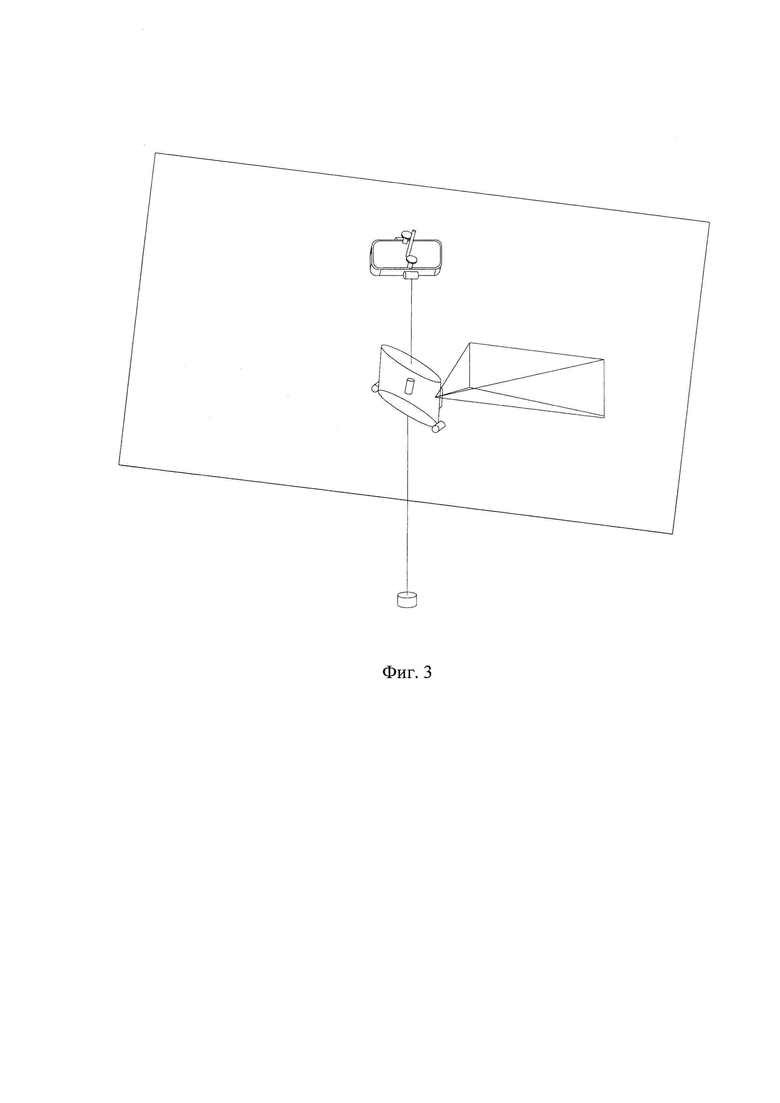
На фиг. 3 представлено переключение гидролокатора устройства в режим повышенной разрешающей способности;
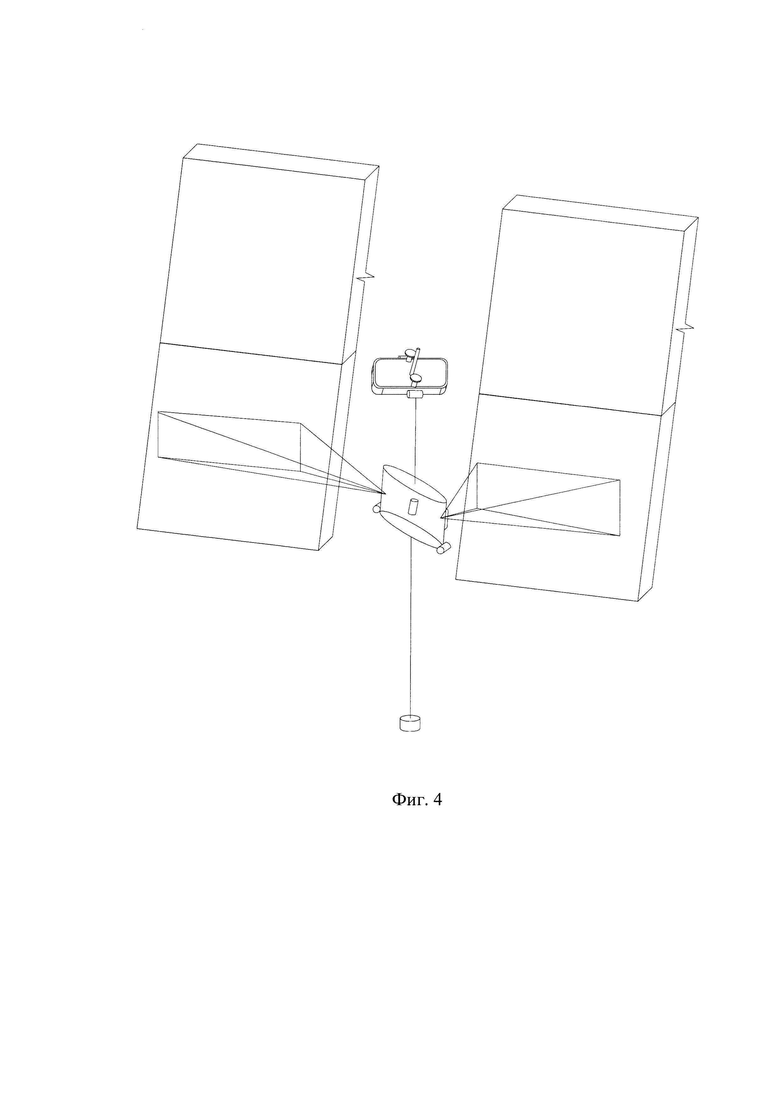
На фиг. 4 представлена работа гидролокатора устройства при обследовании сооружения в режиме повышенной разрешающей способности.
На фигурах 1…2 используются следующие условные обозначения и нумерация, представленная арабскими цифрами:
1 - тросовая линия;
2 - якорь;
3 - плавающий буй;
4 - согласованная пара горизонтальных движителей;
5 - модуль навигации глобальной спутниковой системы позиционирования;
6 - антенну Wi-Fi;
7 - подвижный носитель;
8 - вертикальный движитель;
9 - согласованная пара горизонтальных движителей;
10 - центральный управляющий компьютер;
11 - инерциальная измерительная система;
12 - гидролокатор с переключаемой рабочей частотой;
13 - многожильный подводный кабель;
14 - блок управления;
15 - аккумуляторная батарея;
16 - рабочее место оператора;
17 - блок ультразвукового контроля прочности конструкций;
18 - блок контроля угловых значений;
19 - видеокамера;
20 - ультразвуковой подводный толщиномер;
21 - блок подводного измерения электродных потенциалов;
22 - навигационный приборный узел;
23 - блок регистрации показаний;
24 - компас;
25 - уклономер;
26 - секундомер;
27 - глубиномер;
28 - модуль хранения видеоданных;
29 - регулируемый электропривод.
Применение данного изобретения реализуется в воде, вблизи подлежащих обследованию гидротехнических сооружений. Устройство, представленное соединением якоря 2, подвижного носителя 8 и плавающего буя 3, помещается в воду таким образом, чтобы плавающий буй 3, обеспечивающий связь устройства с рабочим местом оператора 16, находился выше поверхности воды вблизи гидротехнического сооружения, а подвижный носитель 7 и якорь 2 - ниже поверхности воды под плавающим буем 3 таким образом, чтобы соединение плавающего буя 3, подвижного носителя 7 и якоря 2 через тросовую линию 1 имело строго вертикальное очертание. Натяжение тросовой линии 1 от плавающего буя 3 до дна акватории обеспечивается использованием якоря 2 и регулируемого электропривода 29.
Аккумуляторная батарея 15, блок управления 14, модуль хранения видеоданных 28 функционально размещаются внутри корпуса плавающего буя 3 с коммутацией электронных компонентов, описание которой представлено далее. Антенна Wi-Fi 6, модуль навигации глобальной спутниковой системы позиционирования 5, согласованная пара горизонтальных движителей 4, размещаются в виде специальных блоков, имеющих жесткое соединение с корпусом плавающего буя 3 с коммутацией электронных компонентов указанных специальных блоков, описание которой представлено далее. Регулируемый электропривод 29 представлен непосредственно рабочим механизмом указанного привода и вращающейся бобиной с размещенной на ней многожильным подводным кабелем. Рабочий механизм регулируемого электропривода 29 размещается внутри корпуса плавающего буя 3 таким образом, чтобы его коммутация с вращающейся бобиной обеспечивала основное функциональное назначение - подъем и опускание подвижного носителя 7 и якоря 2 заявленного устройства. Бобина регулируемого электропривода 29 размещается в сквозной нише в середине корпуса плавающего буя 3.
Вертикальный движитель 8 и горизонтальные движители 9 размещаются также на корпусе подвижного носителя 7 в виде специальных блоков, имеющих жесткое соединение с корпусом подвижного носителя 7 с коммутацией электронных компонентов указанных специальных блоков, описание которой представлено далее.
Инерциальная измерительная система 11, центральный управляющий компьютер 10, гидролокатор с переключаемой рабочей частотой 12, блок ультразвукового контроля прочности конструкций 17, блок контроля угловых значений 18, ультразвуковой подводный толщиномер 20, блок подводного измерения электродных потенциалов 21 размещаются на корпусе подвижного носителя 7 в виде специальных модулей и блоков с коммутацией электронных компонентов указанных специальных блоков и модулей, описание которой представлено далее.
Навигационный приборный узел 22 также размещается на подводном носителе 7 и представляется в виде специального модуля, содержащего блок регистрации показаний 23, компас 24, уклономер 25, секундомер 26, глубиномер 27, с коммутацией электронных компонентов указанных элементов навигационного приборного узла 22, описание которой представлено далее.
Коммутация элементов устройства для обследования гидротехнических сооружений, а также их функциональное назначение представляется следующим описанием.
Последовательное соединение якоря 2, подвижного носителя 7 и плавающего буя создает тросовую линию 1, при этом якорь 2 и плавающий буй 3 размещены на концах тросовой линии 1. Якорь 2 предназначен для обеспечения устойчивости маршрута движения подвижного носителя 7 по вертикали от плавающего буя 3 до дна акватории.
Плавающий буй 3 предназначен для обеспечения связи с рабочим местом оператора 16 и размещения блока управления 14, аккумуляторной батареи 15, согласованной пары горизонтальных движителей 9, модуля навигации глобальной спутниковой системы позиционирования 5, антенны Wi-Fi 6, модуля хранения видеоданных 28 и регулируемого электропривода 29.
Подвижный носитель 7 предназначен для реализации основной функции заявленного устройства (обследование гидротехнических сооружений), движения по тросовой линии 1 и размещения гидролокатора с переключаемой рабочей частотой 12, центрального управляющего компьютера 10, инерциальной измерительной системой 11, вертикального движителя 8, согласованной пары горизонтальных движителей 4, блока ультразвукового контроля прочности конструкций 17, блока контроля угловых значений 18, видеокамеры 19, ультразвукового подводного толщиномера 20, блока подводного измерения электродных потенциалов 21, навигационного приборного узла 22.
Антенна Wi-Fi 6, блок управления 14, многожильный подводный кабель 13 и центральный управляющий компьютер 10 обеспечивают функционирование единой информационной системы для передачи и получения информации с рабочего места оператора 16, а также согласованной работы всех специализированных элементов заявленного устройства. Вход блока управления 14 соединен с выходом антенны Wi-Fi 6, а выход блока управления 14 соединен с входом антенны Wi-Fi 6. Многожильный подводный кабель 13 разными жилами соединен с входами и выходами блока управления 14 и центрального управляющего компьютера 10.
Гидролокатор с переключаемой рабочей частотой 12 соединен с многожильным подводным кабелем 13, выходом центрального управляющего компьютера 10 и предназначен для передачи гидроакустической информации через многожильный подводный кабель 13, блок управления 14, антенну Wi-Fi 6 на рабочее место оператора 16, а также получения обратной связи от центрального управляющего компьютера 10.
Модуль навигации глобальной спутниковой системы позиционирования 5 соединен с входом блока управления 14 и предназначен для получения текущий навигационной информации с целью горизонтального позиционирования плавающего буя 3 согласованной парой горизонтальных движителей 4.
Антенна Wi-Fi 6 соединена с входом блока управления 14 и предназначена для передачи гидроакустической информации оператору и приема от него управляющих команд.
Аккумуляторная батарея 15 соединена с входом блока управления 14 и предназначена для обеспечения электроэнергией заявленного устройства при обследовании гидротехнических сооружений.
Согласованная пара горизонтальных движителей 4 плавающего буя 3 соединена с выходом блока управления 14 и осуществления движения путем различных комбинаций векторов силы тяги вперед, назад, вправо и влево для управляемого горизонтального позиционирования плавающего буя 3 на поверхности воды.
Выходы центрального управляющего компьютера 10 соединены вертикальным движителем 8, согласованной парой горизонтальным движителем 9, гидролокатором с переключаемой рабочей частотой 12, а входы соединены с инерциальной измерительной системой 11 блоком ультразвукового контроля прочности конструкций 17, при этом центральный управляющий компьютер 10 предназначен для принятия и выработки команд управления.
Инерциальная измерительная система 11 соединена со входом центрального управляющего компьютера 10 и предназначена для формирования текущей информации об угловом положении подвижного носителя 7.
Вертикальный движитель 8 предназначен для вертикального движения подвижного носителя 7 и запасного дублирования функции регулируемого электропривода 29.
Согласованная пара горизонтальных движителей 9 предназначена для углового ориентирования подвижного носителя 7 вокруг вертикальной оси тросовой линии 1.
Блок ультразвукового контроля прочности конструкций 17 соединен с входом блока управления 14, входом центрального управляющего компьютера 10 и многожильным подводным кабелем 13, предназначен для определения прочности конструкций ультразвуковым методом.
Блок контроля угловых значений 18 размещен на подвижном носителе 7, соединен с навигационным приборным узлом 22 через выход блока регистрации показаний 23, с входом блока управления 14 и сообщается с центральным управляющим компьютером 10 через соединение с многожильным подводным кабелем 13, предназначен для измерения отклонений по вертикали и горизонтали, пространственных положений свай, линейных измерений зазоров между массивами-гигантами и их смещений относительно соседних.
Видеокамера 19 соединена с входом блока управления 14 и сообщается с центральным управляющим компьютером 10 через соединение с многожильным подводным кабелем 13, предназначена для видеофиксации установленных дефектов элементов сооружений непосредственно под водой.
Ультразвуковой подводный толщиномер 20 соединен с входом блока управления 14 и сообщается с центральным управляющим компьютером 10 через соединение с многожильным подводным кабелем 13, предназначен для автономного подводного измерения толщины стальных деталей.
Блок подводного измерения электродных потенциалов 21 соединен с входом блока управления 14 и сообщается с центральным управляющим компьютером 10 через соединение с многожильным подводным кабелем 13, предназначен для измерения электродного потенциала коррозии при оценке эффективности работы системы электрохимической защиты.
Навигационный приборный узел 22, содержащий блок регистрации показаний 23, соединенный с блоком контроля угловых значений 18, компас 24, соединенный с блоком регистрации показаний 23, уклономер 25, соединенный с блоком регистрации показаний 23, секундомер 26, соединенный с блоком регистрации показаний 23, глубиномер 27, соединенный с блоком регистрации показаний 23, сообщается с центральным управляющим компьютером 10 и блоком управления 14 через блок регистрации показаний 23 и многожильный подводный кабель 13, предназначен для измерений расстояний, глубины, углов наклона и определения направлений при обследовании дна акваторий.
Модуль хранения видеоданных 28 соединен с выходом блока управления 14 и предназначен для хранения видеофайлов видеокамеры 19.
Регулируемый электропривод 29 соединен с выходом блоком управления 14 и предназначен для подъема и опускания подвижного носителя 7 и якоря 2 заявленного устройства.
Устройство работает следующим образом.
Тросовую линию 1 устройства для обследования гидротехнических сооружений устанавливают вертикально с помощью якоря 2 и плавающего буя 3 на необходимом расстоянии от обследуемых конструкций посредством использования регулируемого электропривода 29, осуществляющего подъем и опускание подвижного носителя 7 и якоря 2. После включения системы автоматического горизонтального позиционирования подвижного буя 3 оператор через рабочее место оператора 16 и антенну Wi-Fi 6 беспроводным образом осуществляет включение гидролокатора с переключаемой рабочей частотой 12 в обычный режим и выполняет вертикальное движение подвижного носителя 7 подачей команд на вертикальный движитель 8 до обнаружения в поле зрения дефекта гидротехнического сооружения, дополнительно используя видеокамеру 19, находящуюся на подвижном носителе 7.
Оператором через рабочее место оператора 16 и антенну Wi-Fi 6 передаются координаты заданной точки для перемещения устройства в блок управления 14. Согласованные пары горизонтальных движителей 4 и 9, являющиеся парами импеллерных водометных движителей с приводом от электродвигателей, создают по соответствующим командам прямой или реверсный вектор силы тяги каждый вдоль своих осей, что позволяет выполнять горизонтальное позиционирование плавающего буя 3 и подвижного носителя 7 на основе заданных оператором координат и навигационной информации, поступающей из модуля навигации глобальной спутниковой системы позиционирования 5.
Вертикальное движение подвижного носителя 7 осуществляется с помощью регулируемого электропривода 29, функции которого могут дополнительно дублироваться (для обеспечения надежности работы) вертикальным движителем 8 по командам, поступающим от оператора через рабочее место оператора 16, антенну Wi-Fi 6, блок управления 14, многожильный подводный кабель 13 и центральный управляющий компьютер 10. Стабилизация вокруг тросовой линии 1 подвижного носителя 7 осуществляется за счет функционирования инерциальной измерительной системы 11, центрального управляющего компьютера 10 и согласованной пары горизонтальных движителей 9. Поворот подвижного носителя 7 вокруг тросовой линии 1 выполняется парой горизонтальных движителей 9 по командам, поступающим от оператора через рабочее место оператора 16 в центральный управляющий компьютер 10, антенну Wi-Fi 6, блок управления 14 и многожильный подводный кабель 13, а стабилизация положения реализуется за счет заданной информации о необходимом положении подвижного носителя 7 и информации о текущем положении от инерциальной измерительной системы 11 с помощью пары горизонтальных движителей 9.
С помощью гидролокатора с переключаемой рабочей частотой 12 получают гидроакустическое изображение через многожильный кабель 13, блок управления 14, антенну Wi-Fi 6 на рабочее место оператора 16. Включение и выключение гидролокатора с переключаемой рабочей частотой 12, выбор режима его работы реализуется командами, которые поступают от оператора через рабочее место оператора 16, антенну Wi-Fi 6, блок управления 14 и многожильный подводный кабель 13.
Информация, поступающая от гидролокатора с переключаемой рабочей частотой 12, синхронизируется с информацией, поступающей от видеокамеры 19 к центральному управляющему компьютеру 10 через многожильный подводный кабель 13 и блоку управления 14, для представления на рабочее место оператора 16 через антенну Wi-Fi 6. Поступающая от видеокамеры 19 информация к блоку управления 14 направляется для хранения в модуль хранения видеоданных 28.
Для определения прочности конструкций гидротехнических сооружений из бетона и железобетона используется блок ультразвукового контроля прочности конструкций 17, реализующий функцию регистрации скорости прохождения ультразвуковых волн через конструкцию сооружения. По результатам контроля прочности посредством использования ультразвуковых волн информация от блока ультразвукового контроля прочности конструкций 17 поступает к центральному управляющему компьютеру 10 и блоку управления 14 напрямую, а также для обеспечения надежности дублируется через многожильный подводный кабель 13, и направляется на рабочее место оператора 16 через антенну Wi-Fi 6 для принятия решений оператором.
Для измерения отклонений по вертикали и горизонтали, пространственных положений свай, линейных измерений зазоров между гидротехнических сооружений, являющимися массивами-гигантами, и их смещений относительно соседних под водой используется блок контроля угловых значений 18 по принципу работы гидролокатора с дополнительной аппаратно-программной частью обеспечения расчетных операций по измерению отклонений, информация от которого поступает через многожильный подводный кабель 13 к центральному управляющему компьютеру 10 и напрямую к блоку управления 14 для последующей передачи на рабочее место оператора 16 через антенну Wi-Fi 6.
Для автономного подводного измерения толщины стальных деталей в диапазоне 3-100 мм с точностью 0,2 мм с регистрацией показаний на дисплее на устройстве используется ультразвуковой подводный толщиномер 20, информация от которого, кроме регистрации показаний на дисплее, также поступает через многожильный подводный кабель 13 к центральному управляющему компьютеру 10 и напрямую к блоку управления 14 для последующей передачи на рабочее место оператора 16 через антенну Wi-Fi 6. Указанный ультразвуковой подводный толщиномер 20 используется оператором для определения эксплуатационных дефектов металлических элементов гидротехнических сооружений, подлежащих обследованию с целью определения технического состояния.
Для измерения электродного потенциала коррозии при оценке эффективности работы системы электрохимической защиты с регистрацией показаний на дисплее в устройстве используется блок подводного измерения электродных потенциалов 21 в соответствии с требованиями по объему мероприятий при техническом контроле гидротехнических сооружений. Блок подводного измерения электродных потенциалов 21 работает посредством применения измерительных электродов в передней части указанного блока, принцип работы которого основан на измерении потенциала различных точек подводной металлической конструкции относительно условно нулевого потенциала. Для измерения электродного потенциала оператору необходимо обеспечить позиционирование устройства для обследования гидротехнических сооружений таким образом, чтобы измерительные электроды блока подводного измерения электродных потенциалов 21 имели возможность соприкосновения с металлическим элементом гидротехнического сооружения. Информация о результатах измерения от блока подводного измерения электродных потенциалов 21 поступает через многожильный подводный кабель 13 к центральному управляющему компьютеру 10 и напрямую к блоку управления 14 для последующей передачи на рабочее место оператора 16 через антенну Wi-Fi 6.
Навигационный приборный узел 22 применяется оператором заявленного устройства для измерений расстояний, глубины, углов наклона и определения направлений при обследовании дна акваторий, в которых размещаются гидротехнические сооружения. Навигационный приборный узел 22 представлен герметичным модулем, в котором информация от компаса 24, уклономера 25, секундомера 26 и глубиномера 27, поступает в блок регистрации показаний 23 навигационного приборного узла 22 для формирования комплексной оценочной характеристики состояния дна акватории места размещения гидротехнического сооружения. Информация, аккумулируемая в блоке регистрации показаний 23, направляется через многожильный подводный кабель 13 к центральному управляющему компьютеру 10 и напрямую к блоку управления 14 для последующей передачи на рабочее место оператора 16 через антенну Wi-Fi 6.
Таким образом, благодаря усовершенствованию известного устройства достигается требуемый технический результат, заключающийся в повышении достоверности определения состояния строительных конструкций гидротехнических сооружений различного функционального назначения на основе контроля физических параметров и расширения возможностей применения известного устройства посредством добавления новых функций с целью обоснованного подхода к проверке эксплуатационных характеристик используемого гидротехнического объекта.
Использованные источники
1. Патент на изобретение РФ: RU 2468960 С1 от 10.12.20112, МПК В63С 11/48, «Универсальная самоходная спускаемая система обследования и ремонта объектов гидротехнической инфраструктуры».
2. Патент на изобретение РФ: RU 2683369 С2 от от 20.12.2018, МПК G01M 7/00, «Способ и система контроля состояния конструкций».
3. Патент на изобретение РФ: RU 1940241 U1 от 25.11.2019, МПК G01B 21/00, «Устройство контроля технического состояния строительных конструкций».
4. Патент на изобретение РФ: RU 2724156 С1 от 22.06.2020, МПК G01S 15/88, «Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений» - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений | 2019 |
|
RU2724156C1 |
| Многофункциональное устройство для осуществления глубоководного контроля за подводной средой и подводно-техническими работами | 2021 |
|
RU2760985C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Подвижный подводный носитель, оснащенный системой горизонтальной угловой стабилизации относительно вертикальных плоскостных гидротехнических сооружений | 2020 |
|
RU2739871C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| ПРИТАПЛИВАЕМЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ИЗМЕРИТЕЛЬНЫХ И ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2011 |
|
RU2468959C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
Использование: изобретение относится к области подводной техники, используемой для обследования, обслуживания и периодического осмотра поверхностей гидротехнических сооружений, а именно к телеуправляемым подводным робототехническим системам, обеспечивающим высокоточное обследование, в том числе с применением методов неразрушающего контроля, профилирование подводных протяженных и размещенных в зоне переменного уровня воды поверхностей объектов. Сущность: устройство для обследования гидротехнических сооружений дополнительно содержит блок ультразвукового контроля прочности конструкций, блок контроля угловых значений, видеокамеру, ультразвуковой подводный толщиномер, блок подводного измерения электродных потенциалов, навигационный приборный узел, размещенные на подвижном носителе, а также компас, соединенный с блоком регистрации показаний, уклономер, соединенный с блоком регистрации показаний, секундомер, соединенный с блоком регистрации показаний, глубиномер, соединенный с блоком регистрации показаний; модуль хранения видеоданных, размещенный на плавающем буе, соединенный с выходом блока управления, предназначенный для хранения видеофайлов видеокамеры; при этом тросовая линия дополнительно снабжена регулируемым электроприводом, размещенным на плавающем буе и соединенным с выходом блоком управления. Технический результат: повышение достоверности определения технического состояния строительных конструкций гидротехнических сооружений различного функционального назначения на основе контроля физических параметров и добавления новых функциональных опций - ультразвуковой контроль прочности строительных конструкций, определение отклонений между сооружениями и измерение зазоров между конструкциями гидротехнических сооружений, определение толщины металлических конструкций под водой, определение электродных потенциалов коррозии металлических конструкций, обследование дна акваторий. 4 ил.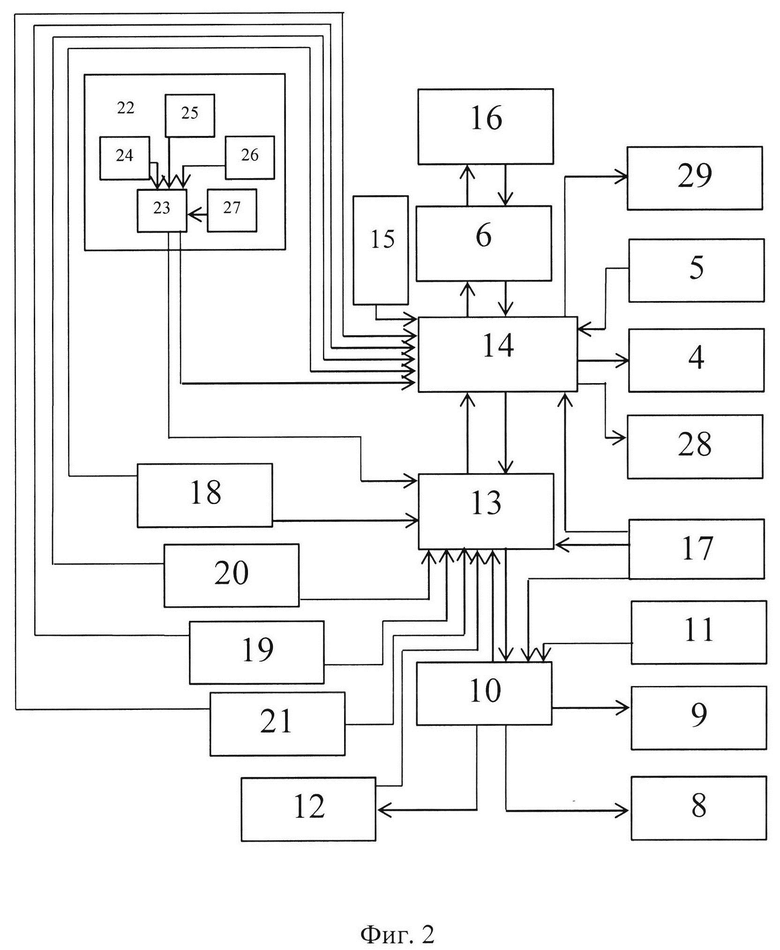
Устройство для обследования гидротехнических сооружений, содержащее гидролокатор, последовательное тросовое соединение якоря, подвижного носителя и плавающего буя, создавая тросовую линию, при этом якорь и плавающий буй размещены на концах тросовой линии, а плавающий буй снабжен блоком управления, аккумуляторной батареей, согласованной парой горизонтальных движителей, модулем навигации глобальной спутниковой системы позиционирования и антенной Wi-Fi, предназначенной для передачи гидроакустической информации оператору и приема от него управляющих команд, причем аккумуляторная батарея, модуль навигации глобальной спутниковой системы позиционирования и антенна Wi-Fi соединены с входами блока управления, а пара горизонтальных движителей буя соединена с выходами блока управления, подвижный носитель установлен на тросе с возможностью движения по тросовой линии и снабжен гидролокатором с переключаемой рабочей частотой, центральным управляющим компьютером, инерциальной измерительной системой, вертикальным движителем для вертикального движения подвижного носителя и согласованной парой горизонтальных движителей, предназначенных для углового ориентирования подвижного носителя вокруг вертикальной оси тросовой линии, при этом центральный управляющий компьютер выполнен с возможностью принятия команд от блока управления через многожильный подводный кабель и выработки команд управления через соединенные с ним электрически вертикальный движитель, согласованную пару горизонтальных движителей подвижного носителя, инерционную измерительную систему и гидролокатор с переключаемой рабочей частотой, который также соединен через многожильный подводный кабель с блоком управления и антенной Wi-Fi, отличающееся тем, что устройство для обследования подводных гидротехнических сооружений дополнительно содержит блок ультразвукового контроля прочности конструкций, размещенный на подвижном носителе, соединенный с входом блока управления, входом центрального управляющего компьютера и многожильным подводным кабелем, предназначенный для определения прочности конструкций ультразвуковым методом; блок контроля угловых значений, размещенный на подвижном носителе, соединенный с навигационным приборным узлом через блок регистрации показаний, с входом блока управления и сообщающийся с центральным управляющим компьютером через соединение с многожильным подводным кабелем, предназначенный для измерения отклонений по вертикали и горизонтали, пространственных положений свай, линейных измерений зазоров между массивами-гигантами и их смещений относительно соседних; видеокамеру, размещенную на подвижном носителе, соединенную с входом блока управления и сообщающуюся с центральным управляющим компьютером через соединение с многожильным подводным кабелем, предназначенную для видеофиксации установленных дефектов элементов сооружений непосредственно под водой; ультразвуковой подводный толщиномер, размещенный на подвижном носителе, соединенный с входом блока управления и сообщающийся с центральным управляющим компьютером через соединение с многожильным подводным кабелем, предназначенный для автономного подводного измерения толщины стальных деталей; блок подводного измерения электродных потенциалов, размещенный на подвижном носителе, соединенный с входом блока управления и сообщающийся с центральным управляющим компьютером через соединение с многожильным подводным кабелем, предназначенный для измерения электродного потенциала коррозии при оценке эффективности работы системы электрохимической защиты; навигационный приборный узел, размещенный на подвижном носителе, содержащий блок регистрации показаний, соединенный с блоком контроля угловых значений, компас, соединенный с блоком регистрации показаний, уклономер, соединенный с блоком регистрации показаний, секундомер, соединенный с блоком регистрации показаний, глубиномер, соединенный с блоком регистрации показаний и сообщающийся с центральным управляющим компьютером и блоком управления через блок регистрации показаний и многожильный подводный кабель, предназначенный для измерений расстояний, глубины, углов наклона и определения направлений при обследовании дна акваторий; модуль хранения видеоданных, размещенный на плавающем буе, соединенный с выходом блока управления, предназначенный для хранения видеофайлов видеокамеры; при этом тросовая линия дополнительно снабжена регулируемым электроприводом, размещенным на плавающем буе и соединенным с выходом блоком управления.
| Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений | 2019 |
|
RU2724156C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| Подвижный подводный носитель, оснащенный системой горизонтальной угловой стабилизации относительно вертикальных плоскостных гидротехнических сооружений | 2020 |
|
RU2739871C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| CN 207717803 U, 10.08.2018. | |||

