Область техники, к которой относится изобретение.
Изобретение относится к области подводной техники, используемой для обслуживания и периодического осмотра поверхностей подводной части гидротехнической инфраструктуры, а именно к телеуправляемым подводным робототехническим системам, обеспечивающим высокоточное обследование, в том числе с применением методов неразрушающего контроля, профилирования вертикально расположенных подводных объектов.
Уровень техники.
В действующем стандарте СТО РусГидро 02.01.109 - 2013 Приложение 1 к приказу ОАО «РусГидро» от 31.01.2013 №70 подробно изложены требования к выполнению подводно-технического обследования гидротехнических сооружений (ГТС). При проведении гидрофизических и геофизических работ при обследовании ГТС необходима информация о точном значении курсового угла носителя гидролокационной аппаратуры.
На сегодняшний день известно использование при проведении гидрофизических и геофизических работ при обследовании ГТС с получением информация о точном значении курсового угла носителя гидролокационной аппаратуры, малогабаритных инерциально-навигационных систем, содержащих по три датчика угловых скоростей, три ортогональных акселерометра и три ортогональных магнитометра. Датчиками курса выступают магнитометры, позволяющие измерить текущий курс относительно направления на магнитный полюс Земли. Пример подобной малогабаритной системы приведен в источнике информации [An invaluable heading and motion sensor for ROV and AUV navigation applications найден 22.04.2020 в Интернет по адресу: https://www.tritech.co.uk/media/products/heading-motion-sensor-intelligent-gyro-compass-igc.pdf?id=2e964838]. Характеристики данной системы следующие: диапазон ориентации 360°; диапазон угловой скорости ±300° в секунду; разрешение датчика 16 бит; динамическая компенсация - цифровое управление замкнутого контура (0-50 Гц); разрешение ориентации <0,1°; точность - более чем 1°; температурный дрейф ±0,025% на °С; линейность 0,23% полной шкалы (испытано в статических условиях); стабильность - 0,2 & deg; спектр - гироскопы: ±300° в секунду; акселерометры: ±5 г; магнитометры: ±250μТ.
Недостатком таких датчиков, использующих магнитное поле Земли, является их чувствительность к местным магнитным помехам, создаваемых ферромагнитными телами. По этой причине, например, при применении магнитных компасов на надводных судах приняты специальные ограничения на минимальное расстояние до стальных элементов конструкции судна [П.А. Нечаев, В.В. Григорьев Магнитно-компасное дело: Учебник для мореходных училищ. - 4-е изд., перераб. и доп. - М. Транспорт, 1983. - 239 с.].
Компанией ООО ФОРТ XXI при выполнении работ с помощью гидроакустической аппаратуры и необитаемых подводных телеуправляемых аппаратов было обнаружено сильное влияние собственного магнитного поля ГТС (в основном, создаваемого расположенной внутри тела железобетонной плотины арматуры) на показания систем, основанных на измерениях курса с помощью магнитометров [Дунчевская С.В., Иванов Л.И., Шабалин Ю.В., Шумаев Р.В. Реализация комплексного подхода к подводно-техническому обследованию ГТС с применением современных технических и программных средств / Гидротехника №4 2015 г, С. 38-41]. Ошибка в определении курса может достигать более 10 угловых градусов. Это не позволяет осуществить высокоточное угловое позиционирование оси визирования гидролокационной аппаратуры, установленной на носителе, а значит, не дает возможности точной привязки наблюдаемых гидролокационных изображений к требуемой системе координат, связанной с данным ГТС.
Сущность изобретения.
Технический результат заявленного изобретения заключается в увеличении точности углового позиционирования оси визирования подвижного подводного носителя и более точной привязки наблюдаемых гидролокационных изображений к требуемой системе координат, связанной с данным ГТС.
Технический результат достигается тем, что создан подвижный подводный носитель, оснащенный системой горизонтального углового позиционирования относительно вертикальных плоскостных гидротехнических сооружений, содержащий герметичный корпус, подвижно соединенный с тросом, предназначенным для его перемещения и через герморазъем с кабель-тросом, предназначенным для передачи информации, в полости герметичного корпуса размещены блок управления движителями, аккумуляторная батарея, соединенная с входом блока управления движителями, и блок определения текущей ориентации, причем на внешней оболочке герметичного корпуса установлена согласованная пара горизонтальных движителей, для горизонтального перемещения подвижного подводного носителя и вертикальный движитель, для его вертикального перемещения, в полости герметичного корпуса с выходом на его внешнюю оболочку также установлены два эхолота, размещенные под углом 60-120 градусов относительно друг друга, причем оси характеристики направленности каждого эхолота расположены под углом 30-60 градусов к оси визирования подвижного подводного носителя, при этом кабель-трос электрически соединен с входом и выходом блока управления движителями, который в свою очередь соединен с входом и выходом блока определения текущей ориентации, с входами двух горизонтальных движителей и входом вертикального движителя, а блок определения текущей ориентации соединен с входами и выходами эхолотов.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
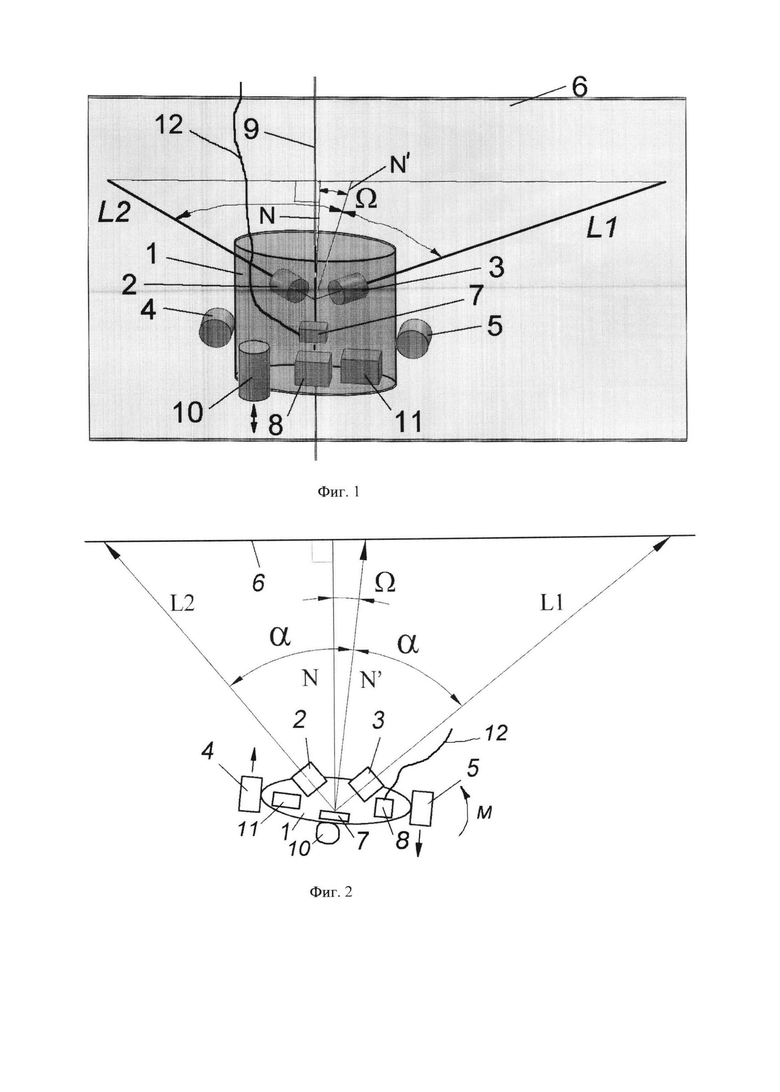
На фиг. 1 представлен общий вид подвижного подводного носителя, оснащенного системой горизонтального углового позиционирования относительно вертикальных плоскостных гидротехнических сооружений.
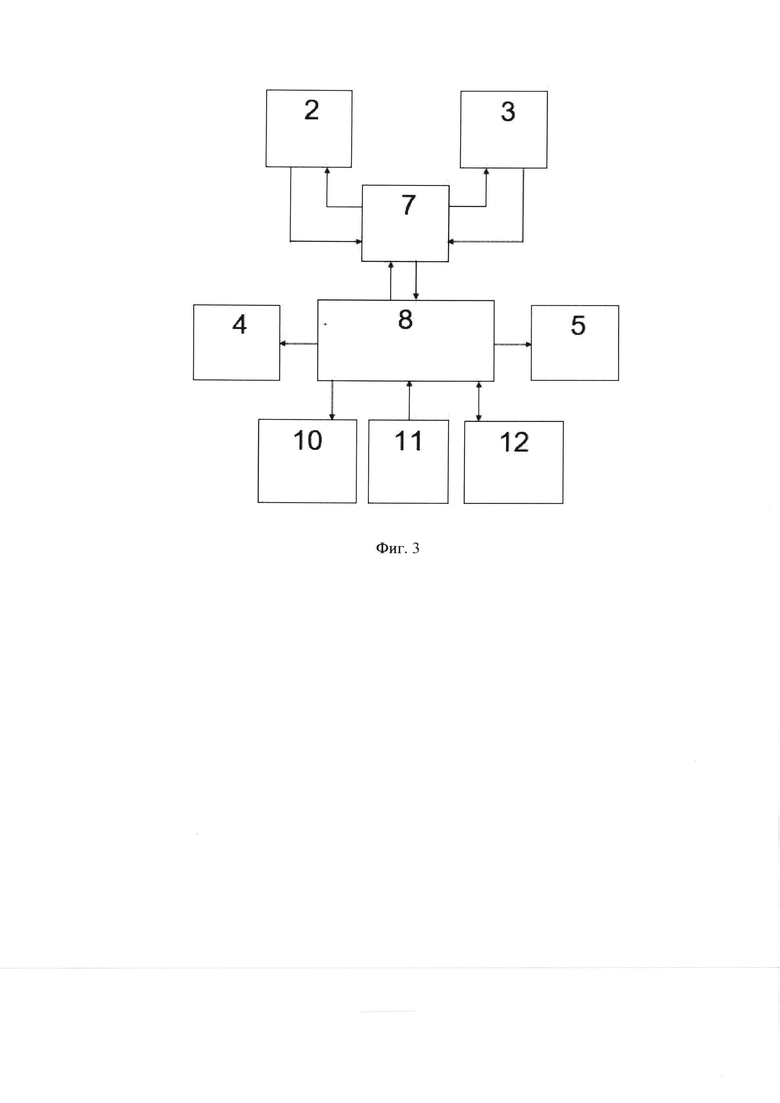
На фиг. 2 представлена схема, поясняющая угловое позиционирование подвижного подводного носителя, оснащенного системой горизонтального углового позиционирования относительно вертикальных плоскостных гидротехнических сооружений.
На фиг. 3 представлена структурная схема подвижного подводного носителя.
Подвижный подводный носитель (1), оснащенный системой горизонтального углового позиционирования относительно вертикальных плоскостных гидротехнических сооружений (6), выполнен в виде герметичного корпуса, (см. фиг. 1 и 2) который, подвижно соединен с тросом (9). В герметичном корпусе подвижного носителя (1) размещены блок управления движителями (8), аккумуляторная батарея (11) и блок определения текущей ориентации (7). Причем, аккумуляторная батарея (11) соединена с входом блока управления движителями (8). Боковые стороны подвижного подводного носителя (1) (внешняя оболочка герметичного корпуса) снабжены согласованной парой горизонтальных движителей (4 и 5), для горизонтального перемещения подвижного подводного носителя (1), а также вертикальным движителем (10), для его вертикального перемещения вдоль тросовой линии, созданной тросом (9). Также в полости герметичного корпуса с выходом на его внешнюю оболочку (переднюю сторону) подвижного подводного носителя (1) размещены два эхолота (2 и 3), установленные под углом 60-120 градусов относительно друг друга. А оси характеристики направленности каждого эхолота установлены под углом 30-60 градусов к оси визирования подвижного подводного носителя (1).
Для передачи с поверхности информации на блок управления движителями (8) и приема информации от него используется кабель-трос (12), соединенный с герметичным корпусом подвижного подводного носителя (1) с использованием герморазъема.
При этом кабель-трос (12) электрически соединен с входом и выходом блока управления движителями (8), который в свою очередь соединен с входом и выходом блока определения текущей ориентации (7). Также выходы блока управления движителями (8) соединены с входами двух горизонтальных движителей (4 и 5) и входом вертикального движителя (10). А блок определения текущей ориентации (7) соединен с входами и выходами эхолотов (2 и 3).
Подробное описание осуществления изобретения.
Подвижный подводный носитель (1) функционирует следующим образом (см. фиг. 1, 2, 3).
Трос (9), вдоль которого осуществляется движение подводного подвижного носителя (1), возможно устанавливать различными способами, в том числе, например, вертикально с помощью якоря и плавающего буя на нужном расстоянии от стенки гидротехнического сооружения (6). Подвижный подводный носитель (1) имеет возможность вертикального перемещения по тросовой линии, создаваемой тросом (9), с помощью вертикального движителя (10).
Управление подвижным подводным носителем (1), оснащенным системой горизонтального углового позиционирования производят посредством кабель-троса (12), и автономной программы, заложенной в блок управления движителями (8). После запуска цикла этой программы через кабель-трос (12) блок управления движителями (8) подает команду на блок определения текущей ориентации (7) для измерения угла отклонения Ω, который включает эхолоты (2 и 3) и получает от них соответственно величины расстояний L2 и L1 до гидротехнического сооружения (6), в частности стенки ГТС. Блок определения текущей ориентации (7) на основе величин L2 и L1 по формуле (4) вычисляет текущий угол отклонения Ω линии визирования подвижного носителя (1) от нормали. Величина угла Ω передается в блок управления движителями (8), причем в программе заложен алгоритм, в соответствии с которым при наличии угла отклонения Ω формируются управляющие сигналы для согласованной пары горизонтальных движителей (4 и 5), представляющих собой пары импеллерных водометных движителей с приводом от электродвигателей, создающим по соответствующим командам прямой или реверсный вектор силы тяги каждый вдоль своих осей, так, чтобы они создавали стабилизирующий вращающий момент М, стремящийся уменьшить угол отклонения Ω до нуля. Для увеличения точности угловой стабилизации используется алгоритм ПИД-регулятора.
Рассмотрим принцип работы данной системы.
Подвижный подводный носитель (1) имеет отклонение оси визирования N' от нормали N к стенке ГТС (6) на угол Ω. В этом случае длины, измеряемые эхолотами (2 и 3) составляют соответственно L1 и L2. Принцип работы эхолотов (2 и 3) основан на измерении времени прохождения расстояния L ультразвуковыми импульсами, излучаемыми гидроакустическими излучателями эхолотов (2 и 3), проходящими расстояние L до стенки ГТС (6), отражающимися от нее, проходящими обратное расстояние L до эхолотов (2 и 3) и принимаемыми гидроакустическими приемниками эхолотов (2 и 3). Выведем соотношение, определяющее точность измерения угла Ω от точностей измерения расстояний L1 и L2. Для расстояний L1 и L2 верны следующие соотношения:

Здесь N - расстояние по нормали от подвижного подводного носителя (1) до стенки ГТС (6). С помощью расположенных в горизонтальной плоскости согласованной пары горизонтальных движителей (4 и 5), позволяющих дать необходимый крутящий момент для угловой ориентации подвижного подводного носителя (1) добиваются такого его положения, чтобы величина L1-L2 была близка к 0. Практически это означает, что ось визирования носителя N' совпадет с нормалью N к стенке ГТС. Таким образом, ось визирования носителя N' будет перпендикулярна стенке ГТС без использования магнитометра, что является преимуществом данного метода.
Точность определения расстояний L1 и L2, например, для используемой в заявленном подвижном подводном носителе (1) модели эхолотов СКАТ [https://fort21.ru/oborudovanie/ekholoty-gidrograficheskie] составляет 0.1%. Тогда величина

После преобразований системы уравнения 1 и принимая во внимание, что угол Ω мал, получаем следующее соотношение:

Покажем, что угол α (угол между осью измерения каждого эхолота (2 и 3) и осью визирования подвижного подводного носителя (1)) выбран в пределах от 30 до 60 градусов при сохранении высокой точности метода.
Для угла 30 градусов:
Принимая во внимание, что угол α выбран 30°, соотношение (3) принимает вид

Принимая во внимание (2) и то, что L1/N=1/cos(30°)=1.155
Получаем: Ω≈0.049°
Для угла 60 градусов:
Принимая во внимание, что угол α выбран 60°, соотношение (3) принимает вид

Принимая во внимание (2) и то, что L1/N=1/cos(60°)=2
Получаем: Ω≈0.016°
Для сравнения, точность измерения курсового угла датчиком XSENS MTi-7 [https://ru.mouser.com/datasheet/2/693/mti-1-series-datasheet-rev-e-1358534.pdf] составляет величину 1.5° (1 σ). Очевидно, что в предлагаемом подвижном подводном носителе (1) реализуется значительно лучшая угловая точность.
Таким образом, используемый заявленный подвижный подводный носитель, оснащенный системой горизонтального углового позиционирования относительно вертикальных плоскостных гидротехнических сооружений, существенно увеличивает точность углового позиционирования оси визирования подвижного носителя в отличие от используемых магнитометров, так как не зависит от помех магнитного поля, создаваемого арматурой в стенке ГТС. А угол α (угол между осью характеристики направленности каждого эхолота и осью визирования подвижного подводного носителя) в пределах от 30 до 60 градусов (соответственно, угол между осями измерения эхолотов будет от 60 до 120 градусов) обеспечивает сохранение высокой точности углового позиционирования оси визирования подвижного подводного носителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений | 2019 |
|
RU2724156C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| Устройство для обследования гидротехнических сооружений | 2021 |
|
RU2769439C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
Изобретение относится к области подводной техники, используемой для обслуживания и периодического осмотра поверхностей подводной части гидротехнической инфраструктуры. Создан подвижный подводный носитель, оснащенный системой горизонтального углового позиционирования относительно вертикальных плоскостных гидротехнических сооружений, содержащий герметичный корпус, подвижно соединенный с тросом, предназначенным для его перемещения и через герморазъем с кабель-тросом, предназначенным для передачи информации. В полости герметичного корпуса размещены блок управления движителями, аккумуляторная батарея, соединенная с входом блока управления движителями, и блок определения текущей ориентации. Причем на внешней оболочке герметичного корпуса установлена согласованная пара горизонтальных движителей, для горизонтального перемещения подвижного подводного носителя и вертикальный движитель, для его вертикального перемещения. В полости герметичного корпуса с выходом на его внешнюю оболочку также установлены два эхолота, размещенные под углом 60-120 градусов относительно друг друга, причем оси характеристики направленности каждого эхолота расположены под углом 30-60 градусов к оси визирования подвижного подводного носителя. При этом кабель-трос электрически соединен с входом и выходом блока управления движителями, который в свою очередь соединен с входом и выходом блока определения текущей ориентации, с входами двух горизонтальных движителей и входом вертикального движителя, а блок определения текущей ориентации соединен с входами и выходами эхолотов. Технический результат заявленного изобретения заключается в увеличении точности углового позиционирования оси визирования подвижного подводного носителя и более точной привязки наблюдаемых гидролокационных изображений к требуемой системе координат, связанной с данным ГТС. 3 ил.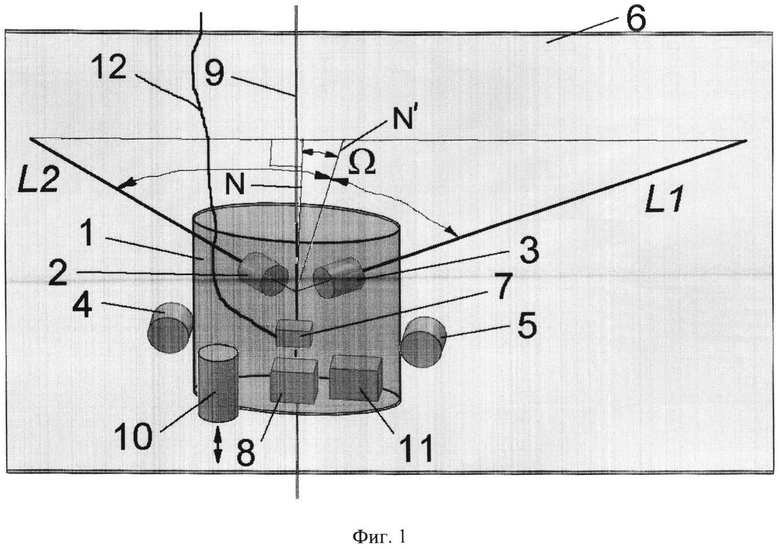
Подвижный подводный носитель, оснащенный системой горизонтального углового позиционирования относительно вертикальных плоскостных гидротехнических сооружений, содержащий герметичный корпус, подвижно соединенный с тросом, предназначенным для его перемещения и через герморазъем с кабель-тросом, предназначенным для передачи информации, в полости герметичного корпуса размещены блок управления движителями, аккумуляторная батарея, соединенная с входом блока управления движителями, и блок определения текущей ориентации, причем на внешней оболочке герметичного корпуса установлена согласованная пара горизонтальных движителей, для горизонтального перемещения подвижного подводного носителя и вертикальный движитель, для его вертикального перемещения, в полости герметичного корпуса с выходом на его внешнюю оболочку также установлены два эхолота, размещенные под углом 60-120 градусов относительно друг друга, причем оси характеристики направленности каждого эхолота расположены под углом 30-60 градусов к оси визирования подвижного подводного носителя, при этом кабель-трос электрически соединен с входом и выходом блока управления движителями, который в свою очередь соединен с входом и выходом блока определения текущей ориентации, с входами двух горизонтальных движителей и входом вертикального движителя, а блок определения текущей ориентации соединен с входами и выходами эхолотов.
| СПОСОБ ЗАЩИТЫ КАРЬЕРОВ ЛЕГКОРАСТВОРИМЫХ СОЛЕЙ ОТ ПОДЗЕМНЫХ МИНЕРАЛИЗОВАННЫХ ВОД | 1955 |
|
SU110065A1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| Микроскоп для наблюдения малоконтрастных объектов | 1952 |
|
SU102350A1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| Устройство для внешней дефектоскопии подводных вертикальных гидротехнических сооружений | 2019 |
|
RU2724156C1 |

