Настоящее изобретение относится к устройству обращения с жидкостью, в частности, образцами биологического материала и соответствующими реагентами.
В области лабораторных приложений, связанных с молекулярной биологией, все чаще используют устройства обращения с жидкостью или роботизированные платформы, способные перемещать биологические жидкости в общем случае путем пипетирования жидкости из трубок для биологических образцов, расположенных на автоматической линии, для перемещения в ячейки специальных пластин, размещенных внутри самой платформы.
Биологическая жидкость в ячейках, надлежащим образом обработанная в соответствии с требованиями в пределах платформы, например, смешанная с надлежащими реагентами, может быть затем направлена роботизированными средствами самой платформы на другие станции, расположенные на той же платформе или функционально подсоединенные, с целью анализа самого образца.
Рабочий объем этого типа роботизированной платформы значительно увеличился за последние годы, в частности, с учетом возросшей доли процессов, связанных с молекулярно-биологическим анализом в области лабораторной медицины, в которых биологические образцы собирают на пластинах "в партии".
Поэтому вышеупомянутым платформам требуется постоянное пополнение так называемыми расходуемыми продуктами, понимая под этим термином "одноразовый продукт", предназначенный для исключительно однократного размещения биологического образца или партии биологических образцов перед своей утилизацией.
Таким образом, расходуемыми продуктами могут быть сами пластины, в общем случае стандартной прямоугольной форму, снабженные ячейками, а также наконечники, которые, будучи надлежащим образом прикрепленными к роботизированным пипеточным средствам, выполняют так называемую операцию пипетирования биологической жидкости или точного забора и последующей выдачи калиброванного и обычно небольшого количества биологической жидкости.
Известно много решений для подачи расходуемых материалов к роботизированной платформе. Однако в некоторых из этих решений помещение расходуемых продуктов на платформу выполняет вручную предназначенный для этого оператор, который обязательно должен действовать во время перерыва в работе платформы. Помимо проблем, связанных с возможной человеческой ошибкой, эта операция в любом случае является обременительной, как потому, что через регулярные интервалы надо использовать лабораторный ресурс для выполнения такой функции, так и с точки зрения времени, поскольку пополнение расходуемых материалов должно происходить, как уже указано, пока платформа не работает.
Другие известные решения предусматривают автоматизацию работы пополняющих средств для расходуемых продуктов на платформе. Эти решения предполагают создание вертикальной зоны хранения самих расходуемых продуктов в непосредственной близости от платформы или, как правило, сбоку от нее и за рабочей поверхностью самой платформы, рядом с рабочей зоной, в которую расходуемые продукты должны быть направлены. Разумеется, что зона хранения, представляющая собой штабель расходуемых продуктов, поднимающийся над рабочей поверхностью платформы, занимает часто значительное пространство и представляет собой физическую границу для движения вдоль этого направления роботизированной руки, предназначенной для захвата и перемещения расходуемых продуктов в направлении вышеупомянутой следующей рабочей зоны.
Другие известные решения решают эту проблему путем размещения вертикальной зоны хранения расходуемых продуктов в прилегающей к платформе области, которая не нарушает нормальный поток расходуемых продуктов из рабочей зоны в другую, поэтому не представляет какого-либо физического препятствия для перемещения самих расходуемых продуктов. В этом случае, как раскрыто самим заявителем, например, в итальянском патенте №1411854, могут быть созданы хранилища расходуемых продуктов, способные периодически и/или при необходимости пополнять роботизированную платформу новыми расходуемыми продуктами. Эти хранилища (называемые также как "отелями расходуемых продуктов"), однако, не интегрированы в платформу. Как следствие, требуется некоторое время, в течение которого расходуемые продукты, начав изнутри хранилищ, дойдут, наконец, до платформы; кроме того, наличие системы транспортировки и загрузки расходуемых продуктов увеличивает затраты на проектирование изготовление оборудования в целом.
Кроме того, все системы хранения расходуемых продуктов, описанные выше, имеют фиксированный размер, т.е. не являются модульными и, следовательно, адаптируемыми к увеличению или уменьшению количества расходуемых продуктов, необходимого для пополнения платформы.
ЕР-1275966 описывает анализатор со средствами подачи расходуемых продуктов, скользящим образом связанными с анализатором.
US-6299840 описывает устройство обращения с жидкостью, содержащее рабочую платформу и средства подачи расходуемых продуктов, скользящим образом связанные с указанной рабочей платформой.
Задачей настоящего изобретения является создание устройства для применений в области молекулярной биологии, предназначенных для переноса биологических жидкостей с использованием расходуемых продуктов, перемещаемых автоматическим образом.
Другая задача устройства состоит в получении зоны хранения вышеупомянутых расходуемых продуктов, интегрированной в устройство и не препятствующей физически действию роботизированных средства, которые возможно могут присутствовать в устройстве. Расходуемые продукты должны быстро передаваться, когда это необходимо, к той зоне устройства, где в них есть необходимость.
Наконец, важно отметить задачу создания зоны хранения расходуемых продуктов, которая является модульной или масштабируемой в соответствии с изменяющимися потребностями и рабочим объемом устройства, передавая таким образом ту часть зоны хранения, которая уже не нужна для хранения расходуемых продуктов, для других целей.
Эту и другие задачи решаются устройством, охарактеризованным в пункте 1 формулы изобретения.
Предпочтительно имеется возможность перемещать подающую платформу независимо от рабочей платформы, без физической связи между указанными платформами, несмотря на то, что те образуют единую рабочую поверхность, когда находятся бок о бок.
Эти и другие признаки настоящего изобретения станут более понятны из приведенного ниже подробного описания варианта его осуществления, на примере неограничивающего примера, раскрытого со ссылкой на прилагаемые рисунки, где:
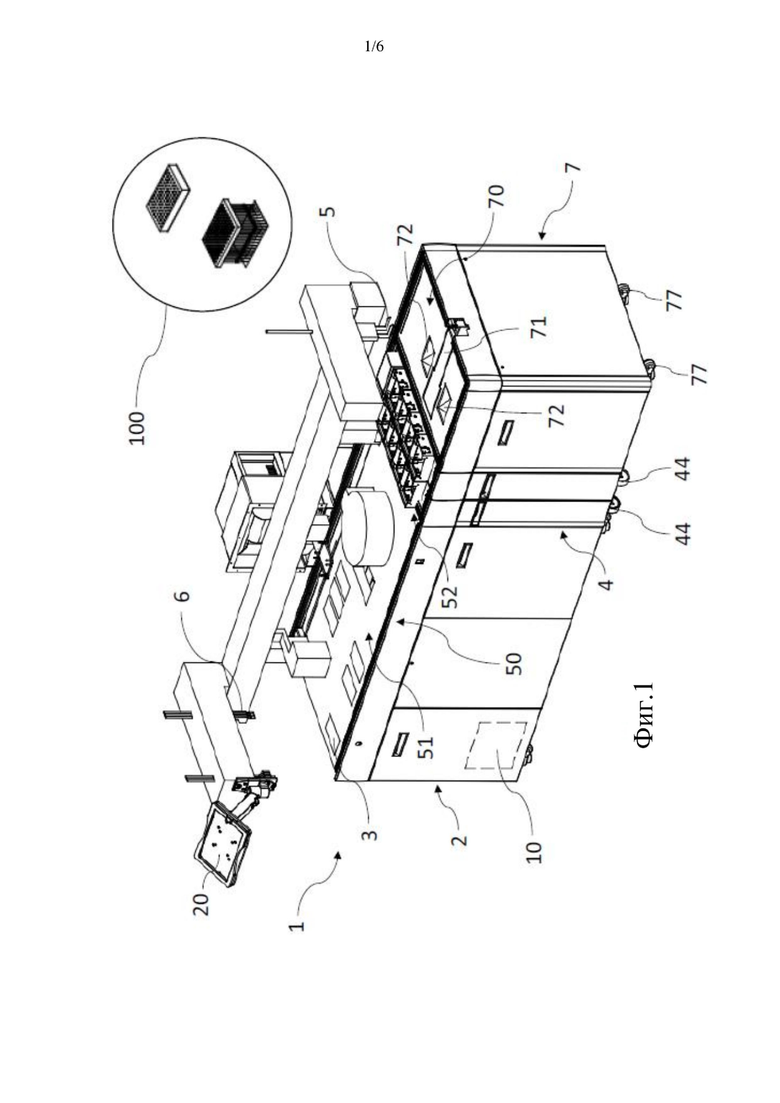
фиг. 1 показывает вид в перспективе устройства обращения с жидкостью в соответствии с настоящим изобретением;
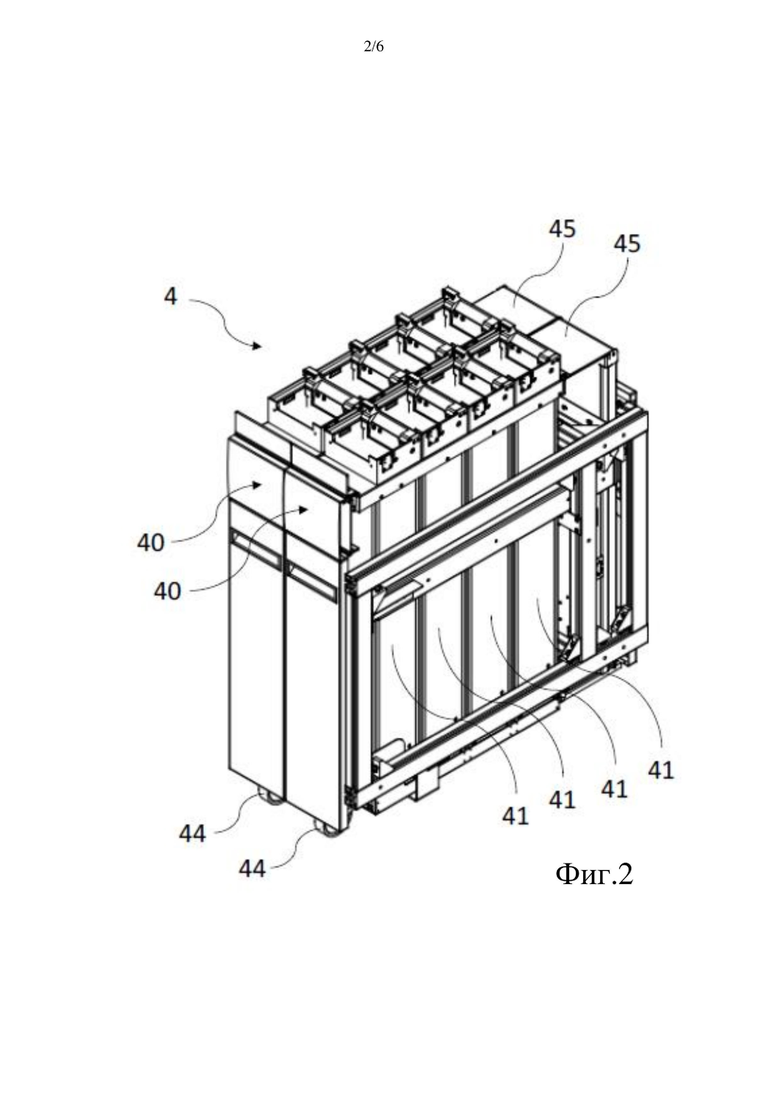
фиг. 2 показывает вид в перспективе подающей платформы для расходуемых продуктов устройства с фиг. 1, содержащего два модульных каркаса, снабженных удерживающими рамами;
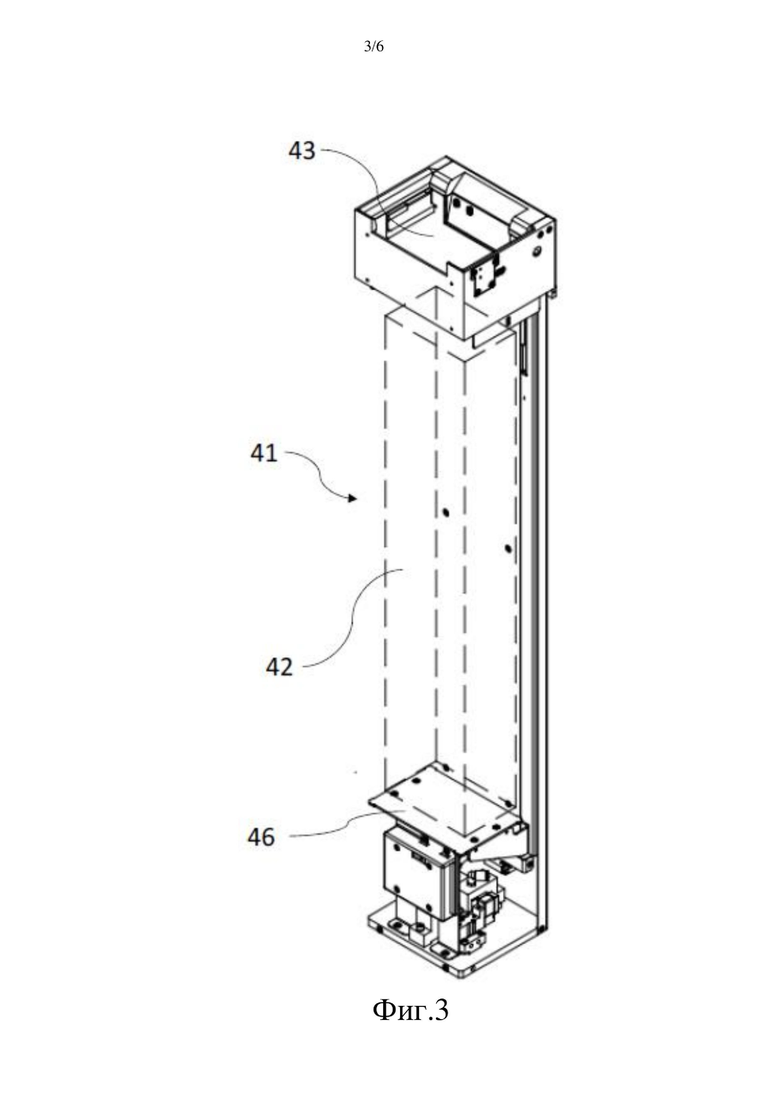
фиг. 3 показывает вид в перспективе удерживающей рамы, изображенной на фиг. 2;
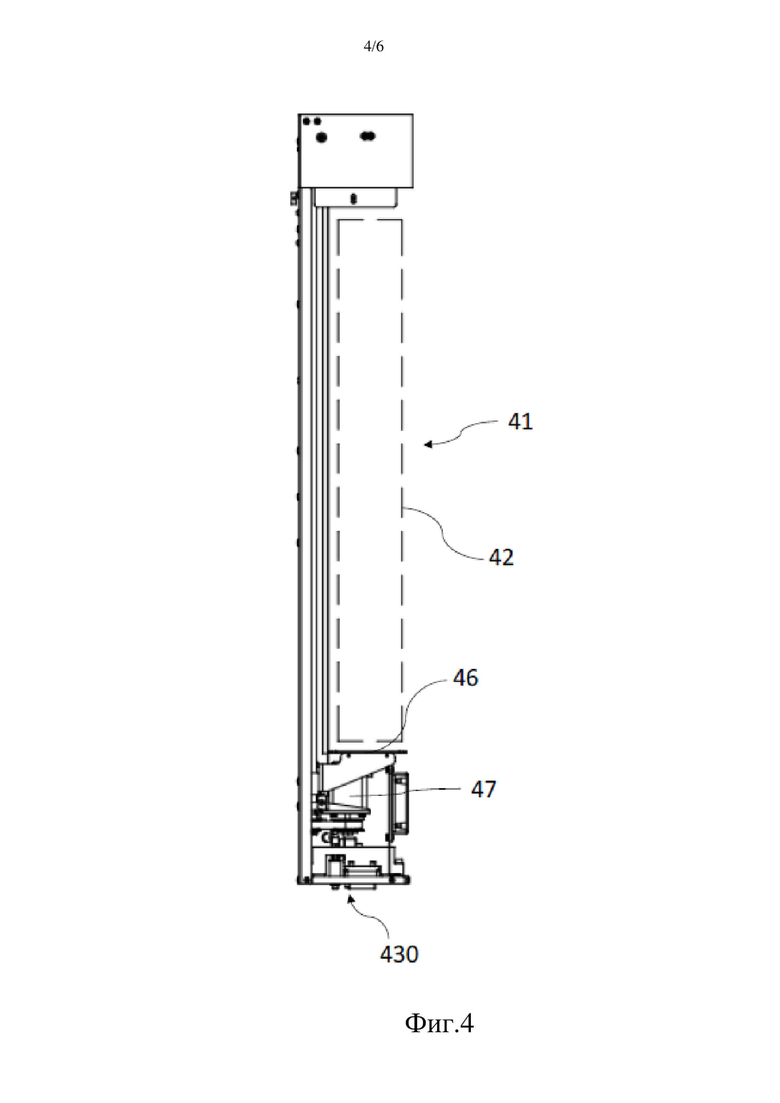
фиг. 4 показывает вид сбоку удерживающей рамы, изображенной на фиг. 3;
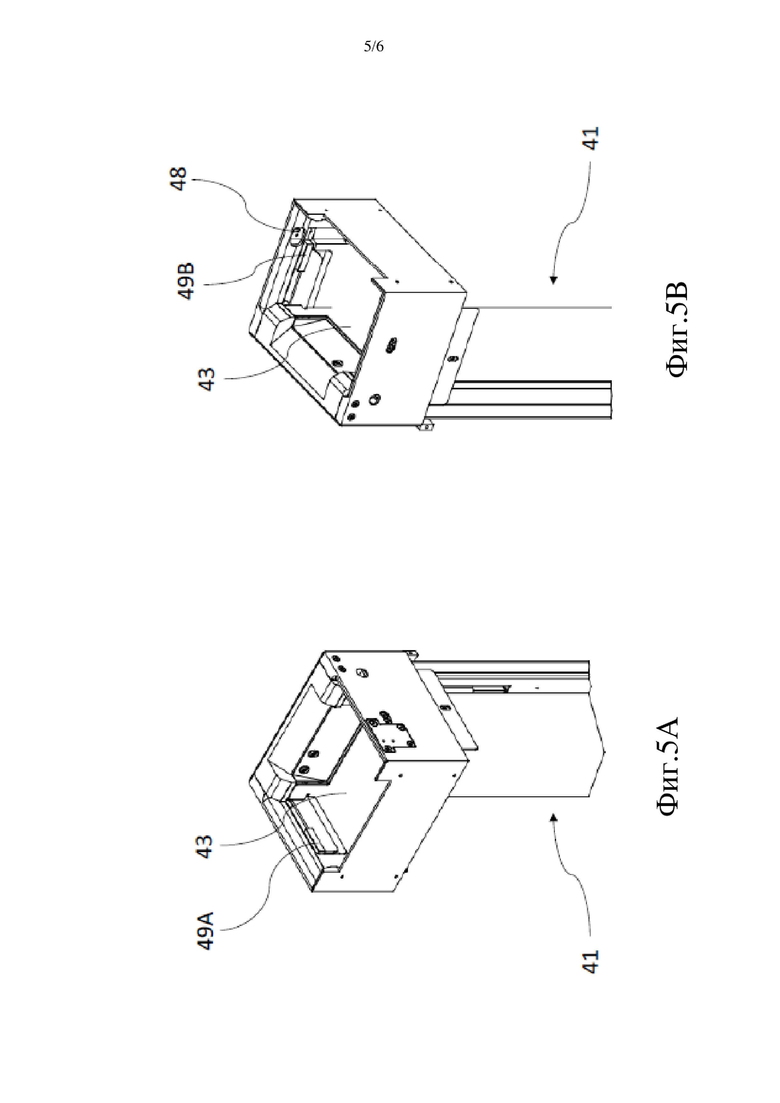
фиг. 5А, 5В показывают два вида в перспективе детали верхней части удерживающей рамы, изображенной на фиг. 3, взаимно повернутые на 180° относительно вертикальной оси;
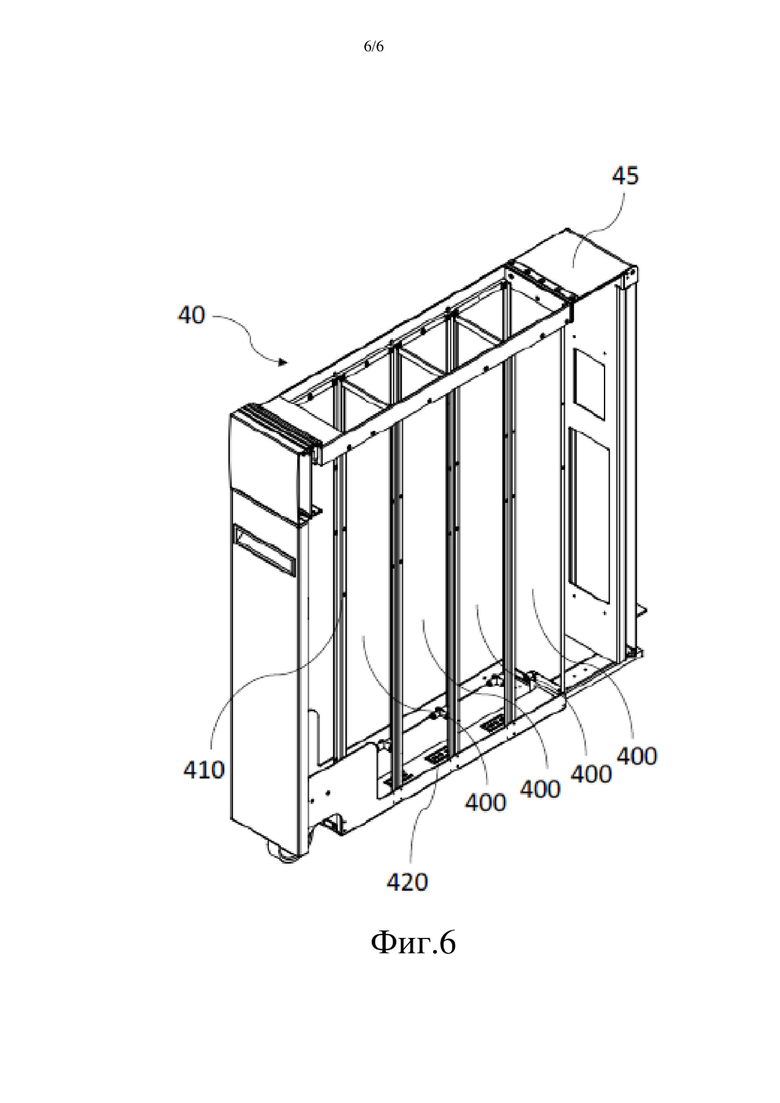
фиг. 6 показывает вид в перспективе модульного каркаса, изображенного на фиг. 2, без удерживающих рам.
Устройство 1 обращения с жидкостью в соответствии с настоящим изобретением, в частности, применимое в области молекулярной биологии, показано на фиг. 1 в соответствии с предпочтительным вариантом осуществления. Такое устройство 1 обращения с жидкостью содержит рабочую платформу 2, имеющую множество гнезд 3 для размещения расходуемых продуктов 100, предназначенных для вмещения биологических жидкостей, которые необходимо переносить и/или анализировать на том же устройстве 1 и/или на одном или нескольких лабораторных анализаторах. В частности, категория "расходуемые продукты" 100 может включать в себя пластины с ячейками (стандартное количество обычно 96), наконечники и опционально другие типы расходуемых продуктов, не включенные варианты осуществления, которые подробно приведены ниже.
Рабочая платформа 2 определяет, в частности, по отношению к своей горизонтальной поверхности, имеющей гнезда 3 для вмещения расходуемых продуктов 100, первую часть 51 рабочей поверхности 50 того же устройства 1, предназначенную быть поверхностью, на которой размещаются расходуемые продукты 100 на различных этапах работы средств, составляющих устройство 1.
Устройство 1 содержит, предпочтительно в положении рядом с рабочей платформой 2, подающую платформу 4 для расходуемых продуктов 100. Такая подающая платформа 4 определяет, в частности, по отношению к ее горизонтальной поверхности, расположенной на той же горизонтальной поверхности рабочей платформы 2, вторую часть 52 рабочей поверхности 50 устройства 1. Функция вышеупомянутой подающей платформы 4 состоит в непрерывной подаче расходуемых продуктов 100 к устройству 1, в частности, к рабочей платформе 2 в соответствии с изменяющимися потребностями и ситуациями, которые могут возникнуть в лаборатории.
Обращение с расходуемыми продуктами 100 внутри устройства 1 выполняется подходящими захватными средствами 5, являющихся частью того же устройства 1. В описанном здесь варианте осуществления это реализовано с помощью подходящего приспособления, имеющего на своих концах пару подвижных стенок или подвижных захватных элементов, предпочтительно способных захватывать одиночный расходуемый продукт 100 с двух противоположных сторон для перемещения его, по меньшей мере, к рабочей поверхности 50 устройства 1 и опционально также вдоль направлений перпендикулярно вышеупомянутой рабочей поверхности 50, позволяя тем самым размещать расходуемые продукты 100 практически в любом месте рабочего пространства устройства 1.
Кроме того, устройство 1 дополнительно снабжено подходящими пипеточными средствами, способными перемещать вышеупомянутые жидкости по меньшей мере на первой части 51 рабочей поверхности 50 или также за ее пределами на других частях. Как показано на фиг. 1, пипеточные средства 6 содержат множество пипеточных элементов, расположенных по существу бок о бок и способных к независимому распределению вдоль одной и той же горизонтальной оси. В общем случае пипеточные элементы работают параллельно, отбирая определенное количество жидкости из соответствующего количества контейнеров, уже находящихся на рабочей платформе 2 или вдоль лабораторной автоматизированной установки (не показано).
Как захватные средства 5, так и пипеточные средства 6 смонтированы с возможностью скольжения, по меньшей мере, над рабочей платформой 2, так чтобы иметь возможность перемещать расходуемые продукты 100 в пределах самой рабочей платформы 2. В частности, как захватные средства 5, так и пипеточные средства 6 соответствующим образом подвижно соединены с соответствующей опорной конструкцией, которые, в свою очередь, подвижно соединены с фиксированной балкой. Для каждой опорной конструкции, таким образом, обеспечена свобода скольжения относительно упомянутой выше фиксированной балки. В варианте осуществления, показанном на фиг. 1, опорные конструкции позволяют реализовать скользящее перемещение соответствующих захватных средств 5 и пипеточных средств 6 вдоль направления, соответствующего наибольшей длине устройства 1 и, как следствие, рабочей платформы 2. В свою очередь, захватные средства 5 и пипеточные средства 6 имеют возможность перемещения относительно соответствующей опорной конструкции по остальным осям декартовой системы координат.
Управление операциями, выполняемыми устройством 1, в частности, упомянутыми выше захватными средствами 5 и пипеточными средствами 6, осуществляет центральный управляющий блок 10 (пример показан пунктирной линией на фиг. 1). Это предусмотрено для управления обращением с жидкостями и с расходуемыми продуктами 100 в течение всего рабочего цикла и по всей протяженности устройства 1, как на рабочей платформе 2, так и на подающей платформе 4. Центральный управляющий блок 10 может, например, быть реализован компьютером с установленным на нем программном обеспечением, конфигурированным для управления вышеупомянутыми компонентами.
Что касается подающей платформы 4 для расходуемых продуктов 100, она, следовательно, расположена под вышеупомянутой фиксированной балкой, что позволяет, по меньшей мере, захватным средствам 5 перемещаться над самой подающей платформой 4, а также за ее пределами, как подробно описано далее. Такая подающая платформа 4 содержит, по меньшей мере, один модульный каркас 40, который в предпочтительном варианте осуществления, показанном на фиг. 2, сконфигурирован как линия подачи расходуемых продуктов 100, по необходимости присоединяемая к устройству 1 или отсоединяемая от него для увеличения или уменьшения количества расходуемых продуктов 100, потребных самого устройства 1.
Таким образом, в частности, больше модульных каркасов 40 может быть расположено рядом друг с другом, так что совместно они образуют подающую платформу 4. Как показано на фиг. 1, в настоящем варианте осуществления подающая платформа 4 имеет два модульных каркаса 40, расположенные рядом друг с другом.
Каждый модульный каркас 40 оснащен по меньшей мере одной удерживающей рамой 41 для расходуемых продуктов 100, в которой расходуемые продукты 100 расположены внутри физически, вертикальным штабелем. Для этой цели модульный каркас 40 имеет множество независимых гнезд 400 (фиг. 6), каждое из которых предназначено для вмещения удерживающей рамы 41.
Каждое независимое гнездо 400 содержит вертикальные направляющие 410, облегчающие вставку удерживающей рамы 41 в само гнездо 400, и, предпочтительно, фиксирующие средства (не показаны), размещенные в основании каждого независимого гнезда 400 и обеспечивающие соединение удерживающей рамы 41 с модульным каркасом 40.
Каждая удерживающая рама 41 должна быть надлежащим образом оснащена для обеспечения функционирования и обмена информацией с остальной частью устройства 1. С этой целью каждое независимое гнездо 400 содержит, по меньшей мере, средства 420 подачи энергии и подачи данных, которые предпочтительно связаны с по меньшей мере одним соединительным гнездом 430 (фиг. 4) вышеупомянутых средств 420 подачи энергии и подачи данных, которые предусмотрены на каждой удерживающей раме 41.
Предпочтительно каждый модульный каркас 40 содержит множество удерживающих рам 41, расположенных бок о бок вдоль по меньшей мере одного из двух направлений рабочей поверхности 50 устройства 1. В частности, в описанном здесь варианте осуществления удерживающие рамы 41 каждого модульного каркаса 40 расположены бок о бок вдоль меньшего размера рабочей поверхности 50, т.е. вдоль меньшего размера устройства 1.
Протяженность модульного каркаса 40 в направлении, заданном удерживающими рамами 41, расположенными рядом друг с другом, может быть такой же как у рабочей платформы 2 или меньше. В частности, если протяженность модульного каркаса 40 меньше протяженности рабочей платформы 2, часть площади рабочей поверхности 50, не занятая модульным каркасом 40 вдоль упомянутого выше бокового направления удерживающих рам 41, может быть использована для размещения других элементов и опционально других гнезд 3 для вмещения расходуемых продуктов 100, образуя тем самым дополнительную площадь или участок рабочей платформы 2. Даже если в модульном каркасе 40 временно или постоянно отсутствует одна или более удерживающих рам 41, относительно свободная зона рабочей поверхности 50 может быть временно закрыта вспомогательной пластиной и, следовательно, вносить вклад как часть рабочей платформы 2 и опциональных гнезд 3 для вмещения расходуемых продуктов 100.
Таким образом, каждый модульный каркас 40 является подвижным относительно рабочей платформы 2, что позволяет, помимо полного добавления самого модульного каркаса 40 к устройству 1 или снятия его с устройства 1, также присоединять конкретную удерживающую раму 41 к модульному каркасу 40 или отсоединять ее отдельно от подающей платформы 4 и, следовательно, от устройства 1. Для этого модульный каркас 40 имеет средства обращения 44, более подробно показанные на фиг. 2, для перемещения модульного каркаса 40 вдоль одного из двух направлений рабочей поверхности 50, тем самым отделяя его от рабочей платформы 2. В предпочтительном варианте такие средства обращения 44 позволяют выполнить отделение модульного каркаса 40 от рабочей платформы 2 вдоль меньшего размера рабочей поверхности 50 или устройства 1.
Таким образом, платформа 4 снабжена указанными средствами обращения 44, которые независимы от указанной рабочей платформы 2 и отсоединены от нее, так что платформа 4 может быть отдельной от указанной рабочей платформы 2.
Такие средства обращения 44 предпочтительно содержат направляющую систему скольжения, например, выполненную с помощью подходящих роликов, установленных у основания модульного каркаса 40, облегчающих подсоединение и отсоединение путем скольжения, например, по полу аналитической лаборатории, а также содержат горизонтальные направляющие (не показаны на фигурах), способные соответствующим образом направлять смещение модульного каркаса 40 как на этапе установки, так и на этапе удаления.
Удерживающая рама 41 имеет удерживающий контейнер 42, пример которого показан на фиг. 3, 4. Такой несущий контейнер 42 позволяет штабелировать расходуемые продукты 100 под рабочей поверхностью 50 устройства 1, в частности, под второй его частью 52, определяемой подающей платформой 4 для расходуемых продуктов 100. Кроме того, удерживающая рама 41 дополнительно содержит отверстие 43, расположенное на рабочей поверхности 50 (фиг. 3, 5А, 5В), позволяющее размещать расходуемые продукты 100 на той же рабочей поверхности 50. Как следствие, в каждой удерживающей раме 41 самый верхний расходуемый продукт 100 в каждой стопке продуктов расположен у отверстия 43: таким образом, его можно захватить захватными средствами 5 и переместить в другую точку устройства 1. Удерживающий контейнер 42 предпочтительно образован соответствующими стенками удерживающей рамы 41, пример чего не показан на вышеупомянутых фиг. 3, 4. Такие стенки позволяют задать удерживающую конструкцию для расходуемых продуктов 100, ввод или извлечение которых можно осуществлять через отверстие 43.
Перемещение расходуемых продуктов 100 к рабочей поверхности 50 осуществляется подходящими средствами, предусмотренные внутри самих удерживающих рам 41. В предпочтительном варианте такие средства взаимно независимы в случае каждой удерживающей рамы и содержат компоненты, более подробно описанные ниже. Каждая удерживающая рама 41 имеет опорную пластину 46, расположенную внутри удерживающего контейнера 42 параллельно рабочей поверхности 50 устройства 1. Опорная пластина 46 поддерживает расходуемые продукты 100, штабелированные внутри удерживающей рамы 41; в частности, расходуемый продукт 100 в самой нижней позиции из всех, помещенных на одной удерживающей раме 41, расположен непосредственно на опорной пластине 46. При этом опорная пластина 46 является подвижной в вышеупомянутом несущем контейнере 42, что позволяет обращаться с расходуемыми продуктами 100 как описано ниже.
Внутри удерживающей рамы 41 имеется, действительно, устройство обращения 47 опорной пластины 46, способное перемещать и располагать расходуемые продукты 100, штабелированные на опорной пластине 46, у отверстия 43 самой удерживающей рамы 41, т.е. на рабочей поверхности 50. Такое устройство обращения 47 содержит в предпочтительном варианте, описанном здесь, электродвигатель, функционально соединенный с опорной пластиной 46 и способный осуществлять вертикальное перемещение этой опорной пластины 46 в двух противоположных направлениях, т.е. перемещение вверх, чтобы расположить расходуемые продукты 100 на отверстии 43 в позиции, позволяющей захватным средствам 5 взять их, или перемещение вниз, чтобы расположить расходуемые продукты 100 у основания удерживающего контейнера 42.
Перемещение опорной пластины 46 обеспечивает, таким образом, переменный объем удерживающего контейнера 42, в котором сама опорная пластина 46 образует подвижное основание. Как показано на фиг. 3 и 4, удерживающая рама 41, таким образом, разделена вышеупомянутой опорной пластиной 46 на две части, что позволяет отделить компоненты, предназначенные обращения опорной пластиной 46, от удерживающего контейнера 42, предназначенного для удержания расходуемых продуктов 100.
Удерживающая рама 41 дополнительно содержит датчик 48 присутствия расположенный на отверстии 43 и решающий задачу детектирования присутствия расходуемого продукта 100 на отверстии 43, на уровне отверстия рабочей поверхности 50.
Кроме того, на отверстии 43 удерживающая рама 41 дополнительно содержит фиксирующее устройство расходуемого продукта 100, облегчающее захват расходуемого продукта 100 захватными средствами 5. В настоящем варианте осуществления фиксирующее устройство содержит пару фиксирующих элементов 49А, 49В, расположенных на противоположных сторонах отверстия 43 (фиг. 5А, 5В). Они подвижны между исходной позицией, в которой расходуемый продукт 100 свободен от фиксирующего устройства и потому может быть захвачен захватными средствами 5, и рабочей позицией, в которой расходуемый продукт 100 зафиксирован фиксирующим устройством и потому не может покинуть удерживающую раму 41. Управление фиксирующим устройством предпочтительно реализовано пневматическими средствами, которые в предпочтительном варианте расположены в той части удерживающей рамы 41, которая содержит вышеупомянутое устройство обращения 47.
Подающая платформа 4 дополнительно содержит закрывающие средства 45, показанные на фиг. 2 и 6, функционально соединенные с модульным каркасом 40 и устройством 1 и образующие закрывающую поверхность во время обращения с самим модульным каркасом 40. В частности, такие закрывающие средства 45 содержат в описанном здесь варианте осуществления множество защитных лент, каждая из которых соответственно присоединена к каждой модульному каркасу 40 с противоположной стороны по отношению к стороне подсоединения к устройству 1 или отсоединения от него. Таким образом, когда оператор приступает к обращению с модульным каркасом 40, отодвигая его от устройства 1, область второй части 52 рабочей поверхности 50 покрыта лентой, соответствующим образом развернутой с фиксированной стороны устройства 1. Такой технический признак позволяет обеспечить возможность защиты вышеупомянутой области в ходе обращения с модульным каркасом 40, предотвращая случайное попадание объектов и/или загрязнений любого типа.
Как описано выше, устройство 1 содержит центральный управляющий блок 10, предназначенный для управления обращением с жидкостями и с расходуемыми продуктами 100. Кроме того, подающая платформа 4 содержит периферийный управляющий блок (не показан), способный хранить в памяти тип расходуемого продукта 100 и количество расходуемого продукта 100, содержащегося в каждой удерживающей раме 41. Упомянутый периферийный управляющий блок может, например, быть реализован как электронная плата управления с установленным программным обеспечением, предназначенным для управления удерживающими рамами 41.
Периферийный управляющий блок функционально подсоединен, например, с помощью соединения CANBUS или вышеупомянутых средств 420 подачи энергии и подачи данных, к каждой удерживающей раме 41, чтобы иметь возможность управлять вышеупомянутыми удерживающими рамами 41 или просто использовать информацию, полученную ими, для реализации дальнейших функций.
Вышеупомянутый периферийный управляющий блок фактически подсоединен к центральному управляющему блоку 10, с которым он может обмениваться информацией, относящейся к каждой из удерживающих рам 41 и/или модульных каркасов 40. Для этого на устройстве 1 предусмотрен дисплейный блок 20, показанный на фиг. 1 и функционально подсоединенный к центральному управляющему блоку 10. Таким образом, вышеупомянутая информация относительно типа и/или количества расходуемого продукта 100 для каждой удерживающей рамы 41 может быть использована для создания виртуального представления на упомянутом дисплейном блоке 20, предназначенного для оператора устройства 1.
Дисплейный блок 20 предпочтительно представляет собой планшет, который посредством практического графического пользовательского интерфейса (GUI) позволяет оператору всегда иметь возможность контролировать, какой расходуемый продукт 100 и в каком количестве присутствует в каждой из удерживающих рам 41, установленных в модульных каркасах 40 подающей платформы 4. Кроме того, посредством такого дисплейного блок 20, функционально подключенного, например, непосредственно к упомянутому периферийному управляющему блоку или через центральный управляющий блок 10, оператор может первоначально задать тип и количество расходуемых продуктов 100, размещенных в конкретной удерживающей раме 41. Таким образом, благодаря связи между периферийным управляющим блоком и дисплейным блоком 20 постоянно и в реальном времени обновляется информация о заполнении каждой удерживающей рамы 41.
В альтернативном варианте осуществления дисплейный блок 20 отображает не только состояние подающей платформы 4, но также способен в реальном времени отображать расположение расходуемых продуктов 100 даже в первой части 51 рабочей поверхности 50 на рабочей платформе 2. Такая дополнительная виртуализация предпочтительно управляется центральным управляющим блоком 10, который способен сохранять в памяти тип расходуемого продукта 100, перемещаемого захватными средствами 5, а также координаты, относящиеся к его расположению на рабочей поверхности 50.
В дополнительном, не показанном, варианте периферийный управляющий блок, предусмотренный для подающей платформы, может быть заменен множеством периферийных управляющих блоков - по одному для каждой удерживающей рамы.
Согласно еще одному непоказанному варианту осуществления, один управляющий блок полностью управляет устройством, т.е. как функциями, относящимися к рабочей платформе, так и функциями, относящимися к захватным средствами и пипеточным средствам, а также функциями, относящимися к подающей платформе для расходуемых продуктов.
Наконец, в предпочтительном варианте осуществления устройство 1 может иметь дополнительную рабочую платформу 7 (показана на фиг. 1) рядом с подающей платформой 4 на стороне, противоположной рабочей платформе 2. Вышеупомянутая дополнительная рабочая платформа 7 определяет дополнительную рабочую поверхность 70, предпочтительно лежащую на уровне рабочей поверхности 50, описанной ранее. В показанном варианте такая дополнительная рабочая платформа 7 содержит транспортерную ленту 71 для расходуемых продуктов 100, например, для подачи вышеупомянутых расходуемых продуктов 100, предварительно обработанных на рабочей платформе 2, к одному или более анализаторов или вспомогательных инструментов, и один или более разгрузочных отсеков 72 для расходуемых продуктов 100, которые использованы и потому подлежат утилизации. Учитывая функции, выполняемые на дополнительной рабочей платформе 7, к дополнительной рабочей поверхности 70 должен быть обеспечен легкий доступ захватных средств 5 для расходуемых продуктов 100 и, следовательно, скользящей балки, на которой закреплены сами захватные средства 5. Подающая платформа 4 согласно настоящему изобретению позволяет получить такой упрощенный доступ также к дополнительной рабочей платформе 7, обеспечивая оптимальное управление расходуемыми продуктами 100 и высокую модульность.
Упомянутая дополнительная рабочая платформа 7 содержит средства обращения 77, независимые и отсоединенные от средств обращения 44 подающей платформы 4, а также независимые и отсоединенные от рабочей платформы 2.
Далее описана работа устройства 1 в соответствии с предпочтительным вариантом осуществления, показанным на прилагаемых фигурах.
Устройство 1 обращения с жидкостью предназначено для размещения, по его рабочей поверхности 50, образцов биологической жидкости, опционально со смешиванием их с подходящими реагентами и затем направления их к дополнительным автоматизированным инструментам, функционально подсоединенным к устройству 1 (не показаны на прилагаемых фигурах), например, на вышеупомянутую дополнительную рабочую платформу 7.
Биологический материал, опционально подаваемый из контейнеров биологических продуктов, стоящих вдоль лабораторной автоматизированной установки, функционально соединенной с устройством 1, забирается пипеточными средствами 6 для жидкости и направляется к одному из гнезд 3 для размещения расходуемых продуктов 100, которыми снабжена рабочая платформа 2 устройства 1, причем забор и перемещение биологического материала управляются центральным управляющим блоком 10, например, согласно подходящим предварительно заданным рабочим протоколам.
Для этого необходимо, чтобы расходуемый продукт 100 уже заранее находился в вышеуказанном гнезде 3, например, пластине с ячейками, готовой для размещения биологического материала, забираемого пипеточными средствами 6. В других же гнездах 3 могут быть размещены расходуемые продукты 100 другого типа, например, сменные наконечники для пипеточных средств 6, для использования в случае следующего забора биологической жидкости.
Независимо от типа расходуемого продукта 100, подлежащего перемещению в одно из гнезд 3 рабочей платформы 2, его надо забирать с подающей платформы 4, которая действует фактически в качестве склада хранения расходуемых продуктов 100 любого типа.
Исходя из того, что подающая платформа 4 и, следовательно, все модульные каркасы 40 изначально пусты, т.е. свободны от расходуемых продуктов 100, определенно необходимо вставлять одну или более удерживающих рам 41 для расходуемых продуктов 100, независимо от того, заполняется ли одна или все модульные каркасы 40, имеющиеся в устройстве 1. С этой целью оператор отсоединяет модульный каркас 40 от рабочей поверхности 50, заставляя модульный каркас 40 скользить с помощью имеющихся средств обращения 44. После того, как отсоединение произошло, оператор может вставить удерживающие рамы 41, уже с расходуемыми продуктами 100, штабелированными внутри свободной независимой секции 400, и затем вернуть заполненный модульный каркас 40 на место. Такие операции могут быть, соответственно, опционально повторены для следующего модульного каркаса 40, требующего пополнения.
Что касается операции помещения расходуемых продуктов 100 внутрь одиночной удерживающей рамы 41, оператор в общем случае сначала решает, сколько и каких расходуемых продуктов 100 требуется и, следовательно, сколько и какие из них должны помещены в каждую удерживающую раму 41. Когда удерживающая рама 41 размещена в независимой секции 400 модульного каркаса 40, оператор может задать количество расходуемого продукта 100 посредством дисплейного блока 20 устройства 1 так, чтобы подать такие данные на периферийный управляющий блок и/или центральный управляющий блок 10. Эта информация может относиться также к типу помещенного расходуемого продукта 100, поскольку разные типы расходуемых продуктов 100 (например, скорее пластины, чем контейнеры с наконечниками) имеют разную высоту и, следовательно, требуют разных настроек и перемещений при последующем обращении с помощью захватных средств 5. Разумеется, весьма важно, чтобы расходуемые продукты 100 внутри одной удерживающей рамы 41 были однородными по типу.
Предшествующее описание, касающееся загрузки и последующих действий, относится к одиночной удерживающей раме 41: следует понимать, это в равном мере применимо ко всем удерживающим рамам 41 устройства 1, участвующим в сходной операции загрузки расходуемых продуктов 100 и/или обращения с ними.
После завершения операций загрузки опорная пластина 46 удерживающей рамы 41 сначала находится в позиции "нижний конец", т.е. на нижнем конце удерживающей рамы 41, основанием которой она является. После того, как загрузка проведена и модульный каркас 40 возвращен в рабочую поверхность 50, периферийный управляющий блок запускает подъем опорной пластины 46, посредством электродвигателя 47.
Связь между периферийным управляющим блоком и каждой удерживающей рамой 41 реализована средствами 420 подачи энергии и подачи данных, предусмотренными для каждой независимой секции 400 модульного каркаса 40, в частности, за счет соединительного гнезда 430 (фиг. 4) таких средств 420 подачи энергии и подачи данных, предусмотренных для каждой удерживающей раме 41.
Опорная пластина 46 поднимается, позволяя датчику 48 присутствия детектировать присутствие первого штабелируемого расходуемого продукта 100, когда тот достигает отверстия 43 на рабочей поверхности 50.
В этот момент фиксирующие элементы 49А, 49В могут быть использованы для фиксации расходуемого продукта 100, расположенного непосредственно под первым штабелированным продуктом. Затем захватные средства 5 могут свободно взять первый штабелированный расходуемый продукт 100, свободный от фиксации, для перемещения его в нужное место, в соответствии с предоставленным протоколом, содержащимся в центральном управляющем блоке 10 устройства 1.
Информация, ранее полученная периферийным управляющим блоком, о типе расходуемого продукта 100, находящегося в удерживающей раме 41, гарантирует, что после удаления расходуемого продукта 100, расположенного в верхней части штабеля, электродвигатель 47 уже "знает" насколько надо поднять опорную пластину 46, чтобы поднести следующий расходуемый продукт 100, находящий непосредственно под только что удаленным продуктом, к отверстию 43, так чтобы его снова обнаружил датчик 48 присутствия. Такое действие может быть выполнено, например, с помощью кодера электродвигателя, обеспечивающего точное перемещение опорной пластины 46.
Для некоторых типов расходуемых продуктов 100, в частности, контейнеров с наконечниками, которые должны взаимодействовать с пипеточными средствами 6 для жидкости, предусмотрена крышка, которую необходимо снять перед выполнением захвата актуального расходуемого продукта 100. В этом случае для каждого расходуемого продукта 100, расположенного на отверстии 43, перемещение фиксирующих элементов 49А, 49В, а также захватных средств 5 происходит дважды, сначала для снятия крышки, а затем для захвата актуального расходуемого продукта 100. Все надлежащим образом управляется центральным управляющим блоком 10, которому помогает периферийный управляющий блок для управления вышеупомянутыми фиксирующими элементами 49А, 49В в соответствии с типом расходуемого продукта 100, находящегося внутри соответствующей удерживающей рамы 41.
Устройство 1 способно управляться с ситуацией, когда ошибочно оператор вручную удаляет расходуемый продукт 100, находящийся на отверстии 43 удерживающей рамы 41, например, когда устройство 1 не работает. В этом случае удаление расходуемого продукта 100, не выполненное захватными средствами 5, не будет надлежащим образом зарегистрировано периферийным управляющим блоком. Однако, когда работа устройства 1 восстановлена, опорная плита 46 каждой удерживающей рамы 41 поднимается, так что следующий расходуемый продукт 100 становится доступным на отверстии 43 и затем должным образом детектируется датчиком 48 присутствия. Информация, относящаяся к высоте опорной пластины 46 по вертикали вдоль удерживающего контейнера 42 вместе с информацией о высоте каждого отдельного расходуемого продукта 100, содержащегося в нем, позволяет периферическому управляющему блоку сделать вывод о количестве оставшихся расходуемых продуктов 100, а именно, что предыдущий расходуемый продукт 100 был удален.
Как альтернатива ручному вводу информации, относящейся к высоте расходуемого продукта 100, если таковая не может быть косвенно получена из информации, относящейся к его типу, устройство 1, в частности, подающая платформа 4 способны автоматически определять вышеупомянутую высоту. В этом случае датчики 48 присутствия, предусмотренные для каждой удерживающей раме 41, позволяют вместе с приводным механизмом электродвигателя 47, подсоединенным к опорной пластине 46, (или опционального кодера) определять расстояние между двумя расходуемыми продуктами 100, расположенными последовательно в штабеле, что позволяет определить высоту одного расходуемого продукта 100.
Расходуемые продукты 100, после захвата захватными средствами 5, направляются в одно из гнезд 3 для размещения расходуемых продуктов 100 первой части 51 рабочей поверхности 50 в соответствии с тем, что было задано центральным управляющим блоком 10. Следует отметить, что датчики 48 присутствия, предусмотренные для каждой удерживающей рамы 41, позволяют осуществлять управление с непрямой обратной связью по фактическому взятию расходуемого продукта 100 вышеупомянутыми захватными средствами 5. Если фактически захват не выполнен, датчики 48 выдают сигнал о присутствии расходуемого продукта 100 даже без обращения опорной пластины 46, позволяя передать сигнал тревоги на центральный управляющий блок 10, управляющий вышеупомянутыми захватными средствами 5.
Каждое расходуемый продукт 100, по завершении на нем операций вдоль рабочей платформы 2, предпочтительно снова может быть взят захватными средствами 5 и направлен к дополнительной рабочей поверхности 70 для размещения на транспортерной ленте 71, чтобы направляться оттуда, например, на последующее автоматическое аналитическое оборудование (не показано). Альтернативно расходуемый продукт 100 может быть убран через один из разгрузочных отсеков 72 (фиг. 1), предусмотренных в дополнительной рабочей платформе 7.
Следует отметить, что на этапе загрузки удерживающих рам 41 и, следовательно, извлечения одного или более модульных каркасов 40 с рабочей поверхности рабочая платформа 2 может продолжать работать, т.е. без необходимости в полном прерывании рабочего цикла устройства 1. Это особенно полезно, если случается внезапный запрос на дополнительные расходуемые продукты 100 относительно того, что было определено оператором во время предыдущего этапа его загрузки и, следовательно, перед запуском устройства 1.
Разумеется, аналогично тому, что уже было описано, необходимо, чтобы в этом случае оператор также обязательно выполнил соответствующие настройки периферийного управляющего блока посредством дисплейного блока 20, куда он вводит информацию, относящуюся к введенным дополнительным расходным материалам 100 и, опционально, к их типу.
В целом предусмотрено, что дисплейный блок 20 может действовать для оператора как устройство для управления, в реальном времени, рабочим потоком всего устройства 1, а также для точного распознавания ситуаций, требующих активного вмешательства путем добавления новых расходуемых продуктов 100 к уже имеющимся в устройстве 1.
Инновационным аспектом изобретения является, таким образом, создание устройства обращения с жидкостью, которое особенно полезно в области молекулярной биологии, в котором обращение с самими жидкостями (биологический материал и опционально реагенты) реализовано в полностью автоматическом режиме, путем обращения с расходуемыми продуктами, предназначенными для временного размещения жидкостей.
Другой инновационный аспект заключается в том, что подающая платформа для расходуемых продуктов конфигурирован как область, в которой расходуемые продукты штабелированы, но расположены ниже по отношению к рабочей поверхности устройства. Таким образом, расходуемые продукты одной удерживающей рамы появляются друг за другом на поверхности, где их забирают захватные средства, и поэтому не занимают объем рабочей поверхности и не создают препятствия в любом направлении для движения роботизированных средств устройства. В то же время, присутствие подающей платформы в положении, уже интегрированном в устройство, позволяет быстрее направлять расходуемые продукты к рабочей платформе по сравнению с известными решениями, в которых области хранения расходуемых продуктов расположены рядом с устройством.
Как можно видеть, подающая платформа состоит из одного или более соседних модульных каркасов каждый из которых, в свою очередь, может иметь одну или более удерживающих рам для расходуемых продуктов. Это означает, что подающая платформа для расходуемых продуктов является модульной, масштабируемой по необходимости (т.е. с учетом количества расходуемых продуктов, которое, как предполагается, необходимо для устройства) и пространства, доступного в лаборатории.
В этой связи, еще один инновационный аспект определяется возможностью для оператора выполнять загрузку расходуемых продуктов путем простой замены пустой удерживающей рамы на заполненную или путем заполнения удерживающей рамы, с временным извлечением соответствующего гнездового модульного каркаса из устройства.
При этом вышеупомянутая загрузка может быть выполнена и позже, после внезапного изменения запроса расходуемых продуктов для устройства. В этом случае временно блокируется только подающая платформа, пока оператор обеспечивает ее загрузку, в то время как рабочая платформа может продолжать работать.
Кроме того, часть подающей платформы, которую на время решили больше не использовать для подачи расходуемых продуктов, может быть легко адаптирована для других целей, например, стать частью рабочей платформы или дополнительной рабочей платформы, используемой для разгрузки расходных продуктов или направления их к анализирующим модулям, расположенным ниже по потоку от устройства.
Наконец, особенно инновационным является оборудование устройства дисплейным блоком, посредством которого оператор может в любой момент контролировать количество и/или тип расходуемых продуктов, присутствующих в каждой удерживающей раме. Очевидно, что связь между дисплейным блоком и центральным или периферийным управляющим блоком устройства позволяет в режиме реального времени обновлять представление на дисплейном блоке, причем с учетом любых добавлений расходуемых продуктов, выполняемых оператором в момент времени после первой загрузки. Кроме того, такое представление, обеспечиваемое дисплейным блоком, может не ограничиваться подающей платформой, но давать больше информации, связанной также с расположением и состоянием заполнения расходуемых продуктов, размещенных по рабочей платформе устройства.
Настоящее изобретение относится к устройству (1) обращения с жидкостью, содержащему рабочую платформу (2), имеющую множество гнезд (3) для размещения расходуемых продуктов (100) и определяющую первую часть (51) рабочей поверхности (50) устройства (1), и подающую платформу (4) для расходуемых продуктов (100), определяющую вторую часть (52) рабочей поверхности (50) и содержащую по меньшей мере одну модульный каркас (40), снабженный по меньшей мере одной удерживающей рамой (41) для расходуемых продуктов (100), причем модульный каркас (40) выполнен подвижным относительно рабочей платформы (2) для обеспечения возможности присоединения удерживающей рамы (41) к модульному каркасу (40) и отсоединения от него; удерживающая рама (41) имеет несущий контейнер (42), позволяющий штабелировать расходуемые продукты (100) под рабочей поверхностью (50), и отверстие (43) на рабочей поверхности (50), позволяющее располагать расходуемые продукты (100) на рабочей поверхности (50). Техническим результатом является создание устройства для применений в области молекулярной биологии, предназначенных для переноса биологических жидкостей с использованием расходуемых продуктов, перемещаемых автоматическим образом. 12 з.п. ф-лы, 6 ил.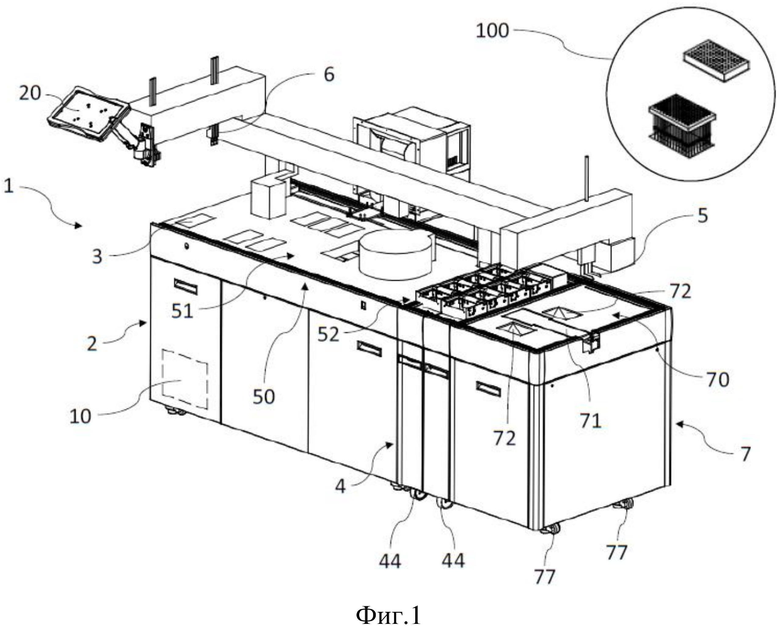
1. Устройство (1) обращения с жидкостью, содержащее:
- рабочую платформу (2), имеющую множество гнезд (3) для размещения расходуемых продуктов (100) и определяющую первую часть (51) рабочей поверхности (50) указанного устройства (1);
- подающую платформу (4) для расходуемых продуктов (100);
- захватные средства (5) для указанных расходуемых продуктов (100), смонтированные с возможностью скольжения, по меньшей мере, над указанной рабочей платформой (2) и способные перемещать указанные расходуемые продукты (100), по меньшей мере, на указанной рабочей поверхности (50);
- пипеточные средства (6) для жидкостей, смонтированные с возможностью скольжения, по меньшей мере, над указанной рабочей платформой (2) и способные перемещать указанные жидкости, по меньшей мере, в указанной первой части (51) указанной рабочей поверхности (50);
при этом указанная подающая платформа (4) определяет вторую часть (52) указанной рабочей поверхности (50) и содержит, по меньшей мере, модульный каркас (40), снабженный, по меньшей мере, удерживающей рамой (41) для указанных расходуемых продуктов (100),
указанная удерживающая рама (41) снабжена удерживающим контейнером (42), обеспечивающим возможность штабелировать указанные расходуемые продукты (100) под указанной рабочей поверхностью (50), и отверстием (43) на указанной рабочей поверхности (50), обеспечивающим возможность расположить указанные расходуемые продукты (100) на указанной рабочей поверхности (50),
отличающееся тем, что
указанная подающая платформа (4) содержит средства обращения (44), независимые и отсоединенные от указанной рабочей платформы (2) так, чтобы располагаться с возможностью отделения рядом с указанной рабочей платформой (2).
2. Устройство (1) обращения с жидкостью по п. 1, отличающееся тем, что содержит дополнительную рабочую платформу (7), расположенную с возможностью отделения рядом с подающей платформой (4) так, чтобы находиться напротив рабочей платформы (2), причем указанная дополнительная рабочая платформа (7) определяет дополнительную рабочую поверхность (70), содержащую транспортерную ленту (71) для расходуемых продуктов (100), при этом указанная дополнительная рабочая платформа (7) содержит средства обращения (77), независимые и отсоединенные от средств обращения (44) подающей платформы 4, и независимые и отсоединенные от рабочей платформы (2).
3. Устройство (1) обращения с жидкостью по п. 1 или 2, причем указанный модульный каркас (40) содержит множество указанных удерживающих рам (41), расположенных бок о бок вдоль по меньшей мере одного из двух направлений указанной рабочей поверхности (50).
4. Устройство (1) обращения с жидкостью по любому из пп. 1-3, причем указанный модульный каркас (40) имеет средства обращения (44), способные перемещать указанный модульный каркас (40) вдоль одного из двух указанных направлений указанной рабочей поверхности (50) для отделения указанного модульного каркаса (40) от указанной рабочей платформы (2).
5. Устройство (1) обращения с жидкостью по любому из пп. 1-4, причем указанная подающая платформа (4) содержит закрывающие средства (45), функционально подсоединенные к указанному модульному каркасу (40) и способные определять закрывающую поверхность в ходе обращения с указанным модульным каркасом (40).
6. Устройство (1) обращения с жидкостью по любому из пп. 1-5, причем указанная удерживающая рама (41) содержит опорную пластину (46), расположенную внутри указанного удерживающего контейнера (42) параллельно указанной рабочей поверхности (50) и способную поддерживать указанные штабелированные расходуемые продукты (100), и устройство обращения (47) указанной опорной пластины (46) по направлению к указанному отверстию (43) для расположения указанных расходуемых продуктов (100) в указанном отверстии (43).
7. Устройство (1) обращения с жидкостью по любому из пп. 1-6, причем указанная удерживающая рама (41) содержит на указанном отверстии (43) датчик (48) присутствия, способный детектировать присутствие указанного расходуемого продукта (100).
8. Устройство (1) обращения с жидкостью по любому из пп. 1-7, причем указанная удерживающая рама (41) содержит фиксирующее устройство для указанного расходуемого продукта (100), расположенного на указанном отверстии (43), причем указанное фиксирующее устройство выполнено подвижным между исходной позицией, в которой расходуемый продукт (100) свободен от указанного фиксирующего устройства, и рабочей позицией, в которой указанный расходуемый продукт (100) зафиксирован указанным фиксирующим устройством.
9. Устройство (1) обращения с жидкостью по п. 8, причем указанное фиксирующее устройство содержит пару фиксирующих элементов (49A, 49B), расположенных на противоположных сторонах указанного отверстия (43).
10. Устройство (1) обращения с жидкостью по любому из пп. 1-9, причем указанный модульный каркас (40) снабжен множеством независимых гнезд (400) для каждой из указанных удерживающих рам (41).
11. Устройство (1) обращения с жидкостью по п. 10, причем каждое из указанных независимых гнезд (400) содержит, по меньшей мере, средства (420) подачи энергии и подачи данных, при этом каждая из указанных удерживающих рам (41) содержит, по меньшей мере, одно соединительное гнездо (430) указанных средств (420) подачи энергии и подачи данных.
12. Устройство (1) обращения с жидкостью по любому из пп. 1-11, причем указанная подающая платформа (4) содержит периферийный управляющий блок, способный хранить в памяти тип расходуемого продукта (100) и количество расходуемого продукта (100), удерживаемого в каждой удерживающей раме (41).
13. Устройство (1) обращения с жидкостью по п. 11, содержащее дисплейный блок (20), функционально подсоединенный к центральному управляющему блоку (10), причем указанный центральный управляющий блок (10) функционально подсоединен к указанному периферийному управляющему блоку и способен виртуально представлять на указанном дисплейном блоке (20) тип расходуемого продукта (100) и/или количество расходуемого продукта (100) для каждой из указанных удерживающих рам (41).
| АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ПЦР В РЕАЛЬНОМ ВРЕМЕНИ ДЛЯ РАЗЛИЧНЫХ АНАЛИЗОВ БИОЛОГИЧЕСКОГО ОБРАЗЦА | 2011 |
|
RU2562572C2 |
| US 7560071 B2, 14.07.2009 | |||
| EP 1275966 B1, 12.07.2006 | |||
| US 6299840 B1, 09.10.2001 | |||
| US 20160238627 A1, 18.08.2016. | |||

