Область техники, к которой относится настоящее изобретение
[0001] Заявляемое изобретение относится к области стереоскопических дисплеев, а более конкретно - к устройству и способу определения расстояния фокусировки глаза для наголовного устройства отображения, а также к соответствующему наголовному устройству отображения и может быть использовано в системах виртуальной/дополненной реальности (Augmented Reality/Virtual Reality, AR/VR).
Уровень техники
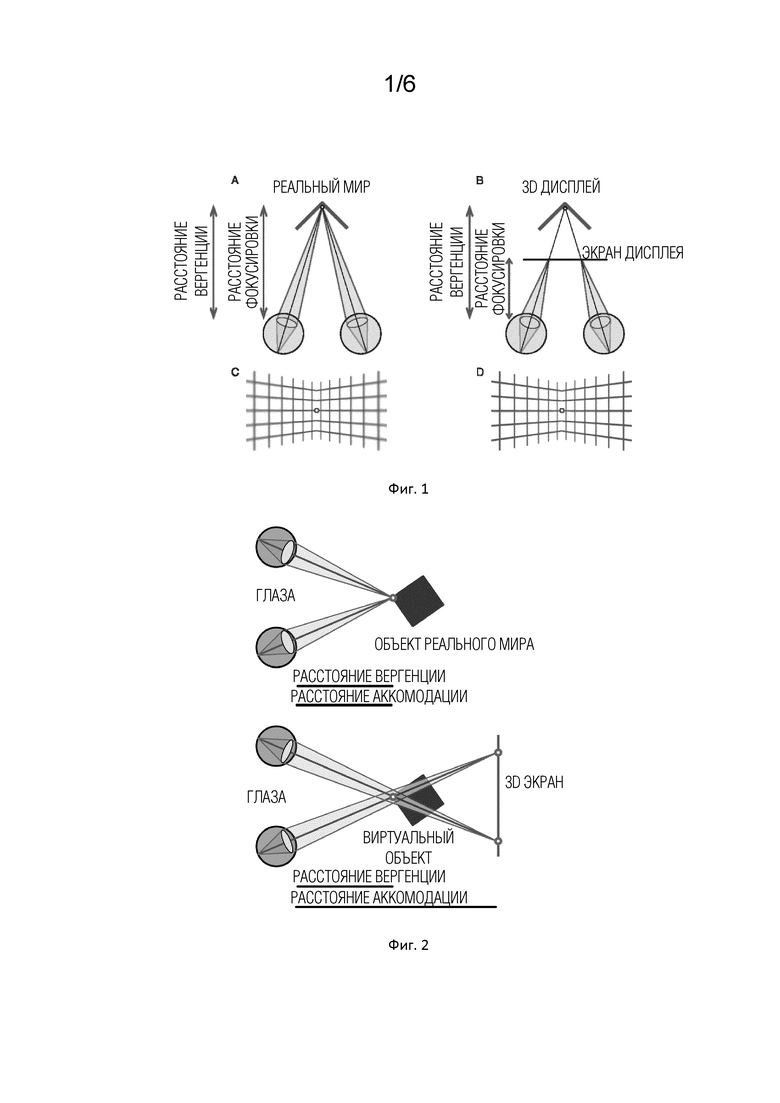
[0002] Физиологические принципы восприятия трехмерных объектов в реальном мире требуют согласования фокусировки глаза (расстояния фокусировки) и точки конвергенции глаза (расстояния вергенции). В современных коммерческих AR/VR-системах, имеющих фиксированное фокусное расстояние, эти величины не могут быть приведены в соответствие, что вызывает так называемый конфликт сигналов вергенции и аккомодации (Vergence-Accommodation Conflict, VAC), и, как следствие, утомление и визуальный дискомфорт для пользователя (см. фиг. 1, 2). В случае использования AR-очков, эффект VAC значительно усложняет процесс совмещения реальных и виртуальных объектов, т.к. при наблюдении реального объекта, виртуальный объект может оказаться расфокусированным. Эти проблемы могут быть устранены с помощью автоматических измерений (отслеживания) фокусировки глаза и обеспечения обратной связи для системы визуализации AR-очков.
[0003] Кроме того, существует проблема нарушения фокусировки в связи с движением глаз. Обычно обзор при использовании устройств виртуальной реальности осуществляется за счет поворота головы, тогда как в реальном мире обзор также может осуществляться за счет движений глаз. В обычных AR/VR системах движение глаза приводит к разрушению сформированного изображения. Для устранения этой проблемы требуется решение, обеспечивающее отслеживание движений глаз.
[0004] Одной из основных проблем AR (систем дополненной реальности) является соответствие фокусировки реальных и виртуальных объектов. Если виртуальные изображения, «расположенные рядом» с объектами реального мира, находятся в разных фокальных плоскостях, несоответствие в степени «размытия» заставляет пользователя менять фокус при взгляде на объекты, которые должны быть полностью резкими.
[0005] Таким образом, существует потребность в дешевом, компактном устройстве отслеживания направления взгляда и фокусировки глаза, которое может быть встроено в AR/VR устройства (например, AR-очки, VR-шлемы). Дополнительными требованиями к такому устройству являются безопасность для глаз пользователя и малая задержка при измерении расстояния фокусировки глаза (высокая скорость измерений).
[0006] Из уровня техники известна система отслеживания движений глаз (eye tracking system), раскрытая в документе US 2014375541 А1. Известная система предусматривает использование камеры времени полета (time of flight camera, TOF-камера) для создания двухмерного (2D) изображения глаза человека, отслеживания направления взгляда и определения расстояния до дисплея. Известная система предназначена только для отслеживания направления взгляда и не обеспечивает получение информации о расстоянии фокусировки глаза. TOF-камеры обладают недостатком наличия мертвых зон на небольшом расстоянии от камеры, что потенциально приводит к усложнению конструкции.
[0007] Из уровня техники известно устройство отслеживания движений глаз, раскрытое в документе US 2017109562 А1. Известное устройство использует датчик глубины пространства (depth sensor) для измерения кривизны передней поверхности глаза для определения направления взгляда. Известное устройство предназначено только для отслеживания направления взгляда и не обеспечивает получение информации о расстоянии фокусировки глаза.
[0008] Из уровня техники известен датчик для оптической лазерной томографии с обратной связью (laser optical feedback tomography, LOFT), раскрытый в документе US 20080208022 A1. Известный датчик обеспечивает улучшение эффективности лазерной автодинной интерферометрии (self-mixing interferometry, SMI) за счет сдвига частоты оптической обратной связи относительно частоты колебаний лазерной релаксации. Недостатками известного датчика являются использование разделителя пучка (beam splitter), устройства сдвига частоты (frequency shifter) и механическое сканирование. Документ US 20080208022 A1 не раскрывает варианты осуществления датчика, применимые для использования в AR/VR устройствах или предназначенные для отслеживания движений глаз.
[0009] Из уровня техники известно наголовное устройство отображения (head-mounted display, HMD), раскрытое в документе US 10154254 A1 Известное устройство включает в себя систему отслеживания движений глаз, основанную на использовании TOF-камеры. Система отслеживания движений глаз включает в себя источник света, устройство формирования изображения и контроллер. Контроллер определяет информацию глубины, относящуюся к поверхностям глаза, и формирует модель глаза. Известное устройство нацелено, в основном, на отслеживание направления взгляда. Недостатком устройства является сложная обработка сигналов на основе обработки изображений искаженных во времени световых паттернов. TOF-камеры, как было упомянуто выше, обладают недостатком наличия мертвых зон на небольшом расстоянии, что потенциально приводит к усложнению конструкции.
[0010] Из уровня техники известно устройство для коррекции зрения с использованием отслеживания движений глаз и обнаружения глубины пространства, раскрытое в документе US 2016370605 A1. Известное устройство включает в себя носимое вычислительное устройство, имеющее регулируемую линзу, датчик отслеживания движений глаз и датчик глубины пространства. Известное устройство оценивает фокусное расстояние косвенным образом и не обеспечивает желаемую точность.
[0011] Из уровня техники известна система отображения, раскрытая в документе US 2017124928 A1. Известная система может захватывать изображения проецированного светового поля и определять фокусные расстояния (или поперечные фокусные положения) различных областей светового поля с использованием захваченных изображений. Система способна корректировать различные недостатки и аберрации дисплея. Изображение формируется на различных фокусных расстояниях. Система основана на отслеживании движений глаз и не предусматривает отслеживание глубины пространства или фокусировки глаза.
Раскрытие сущности изобретения
[0012] Упомянутые проблемы решаются предложенным устройством определения расстояния фокусировки глаза для наголовного устройства отображения, содержащим интерферометр, блок обработки сигналов, блок определения расстояний, блок определения координат точек, блок реконструкции, блок определения расстояния фокусировки глаза. Интерферометр выполнен с возможностью формирования множества частотно модулированных лазерных лучей в различных направлениях и формирования интерферометрического сигнала для каждого луча упомянутого множества лучей, причем каждому направлению луча соответствует информация направления луча, причем по меньшей мере часть упомянутого множества лучей попадает на отражающие поверхности внутренней структуры глаза. Блок обработки сигналов выполнен с возможностью формирования спектра сигнала для каждого интерферометрического сигнала из множества интерферометрических сигналов. Блок определения расстояний выполнен с возможностью анализа спектра сигнала и определения расстояний до отражающих поверхностей для каждого луча упомянутого множества лучей. Блок определения координат точек выполнен с возможностью определения, в системе координат, связанной с наголовным устройством отображения, координат точек поверхностей глаза для каждого из лучей на основе упомянутых определенных расстояний до отражающих поверхностей и информации о направлении луча. Блок реконструкции выполнен с возможностью формирования модели внутренней структуры глаза на основе определенных координат точек поверхностей глаза. Блок определения расстояния фокусировки глаза выполнен с возможностью определения расстояния фокусировки глаза на основе упомянутой модели внутренней структуры глаза.
[0013] Предложенное устройство обеспечивает определение расстояния фокусировки глаза на основе модели внутренней структуры глаза.
[0014] В одном из вариантов осуществления интерферометр представляет собой автодинный интерферометр, содержащий массив лазеров и драйвер массива лазеров, причем драйвер массива лазеров выполнен с возможностью подачи частотно-модулированного управляющего сигнала на каждый лазер массива лазеров, а интерферометрическим сигналом является автодинный сигнал лазера.
[0015] В одном из вариантов осуществления интерферометр представляет собой автодинный интерферометр, содержащий лазер, драйвер лазера и оптико-механическую систему сканирования, причем драйвер лазера выполнен с возможностью подачи частотно-модулированного управляющего сигнала на лазер, а интерферометрическим сигналом является автодинный сигнал лазера.
[0016] В одном из вариантов осуществления котором массив лазеров представляет собой массив поверхностно излучающих лазеров с вертикальным резонатором (VCSEL).
[0017] В одном из вариантов осуществления интерферометр представляет собой двухлучевой интерферометр, содержащий массив лазеров, драйвер массива лазеров, детектор, светоделитель и эталонное зеркало, причем драйвер массива лазеров выполнен с возможностью подачи частотно-модулированного управляющего сигнала на каждый лазер массива лазеров, а интерферометрическим сигналом является сигнал, формируемый детектором.
[0018] В одном из вариантов осуществления интерферометр представляет собой двухлучевой интерферометр, содержащий лазер, драйвер лазера, детектор, светоделитель, эталонное зеркало и оптико-механическую систему сканирования, причем драйвер лазера выполнен с возможностью подачи частотно-модулированного управляющего сигнала на лазер, а интерферометрическим сигналом является сигнал, формируемый детектором.
[0019] В одном из вариантов осуществления блок реконструкции дополнительно выполнен с возможностью определения направления оптической оси глаза.
[0020] Кроме того, предложен соответствующий способ определения расстояния фокусировки глаза для наголовного устройства отображения, содержащий этапы, на которых формируют множество частотно модулированных лазерных лучей в различных направлениях, причем каждому направлению луча соответствует информация направления луча, причем по меньшей мере часть упомянутого множества лучей попадает на отражающие поверхности внутренней структуры глаза, формируют интерферометрический сигнала для каждого луча упомянутого множества лучей, формируют спектр сигнала для каждого интерферометрического сигнала из множества интерферометрических сигналов, анализируют спектр сигнала и определяют расстояния до отражающих поверхностей для каждого луча упомянутого множества лучей, определяют, в системе координат, связанной с наголовным устройством отображения, координаты точек поверхностей глаза для каждого из лучей на основе упомянутых определенных расстояний до отражающих поверхностей и информации о направлении луча, формируют модель внутренней структуры глаза на основе определенных координат точек поверхностей глаза, определяют расстояние фокусировки глаза на основе упомянутой модели внутренней структуры глаза.
[0021] Кроме того, предложено соответствующее наголовное устройство отображения с регулировкой фокусного расстояния, содержащее предложенное устройство определения расстояния фокусировки глаза и систему визуализации с регулируемым фокусным расстоянием, причем система визуализации с регулируемым фокусным расстоянием выполнена с возможностью автоматического регулирования фокусного расстояния на основе расстояния фокусировки глаза, полученного от устройства определения расстояния фокусировки глаза.
Краткое описание чертежей
[0022] На фиг. 1 изображена схема, иллюстрирующая эффект VAC при взгляде на удаленный предмет
[0023] На фиг. 2 изображена схема, иллюстрирующая эффект VAC при взгляде на предмет вблизи.
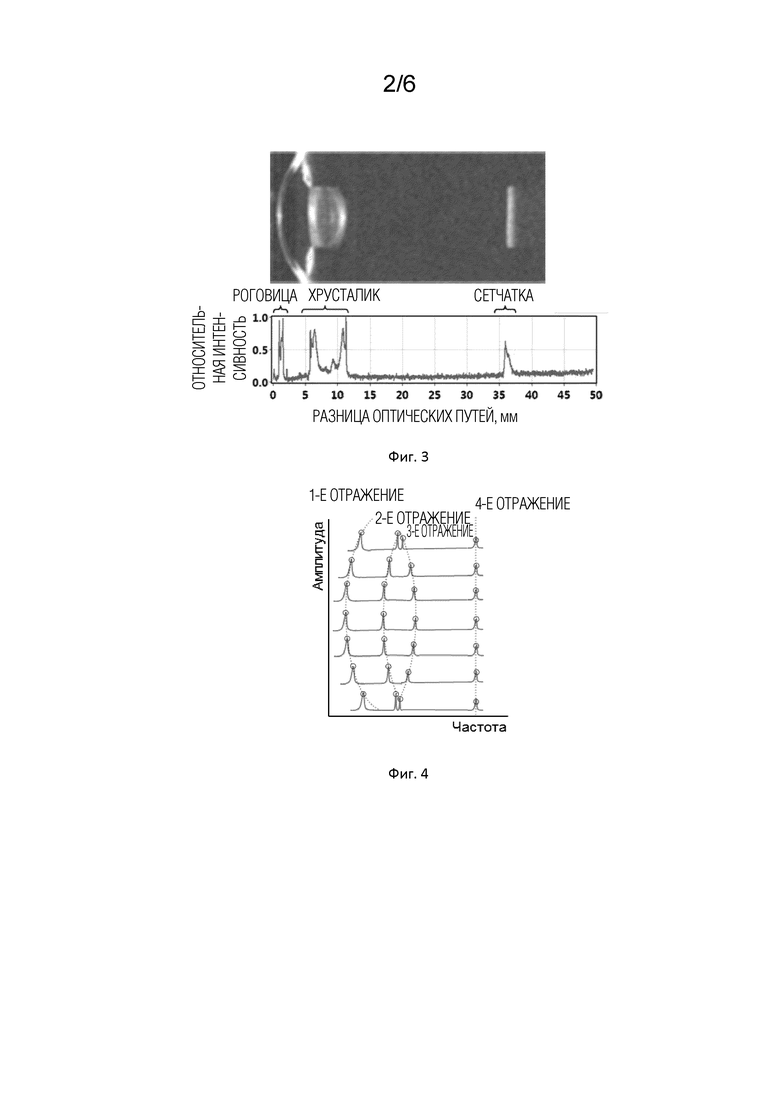
[0024] На фиг. 3 изображена интерпретация спектра интерферометрического сигнала луча, показывающая расстояния до отражающих поверхностей структуры глаза.
[0025] На фиг. 4 схематически изображены спектры интерферометрических сигналов нескольких лучей, отраженных от поверхностей структуры глаза.
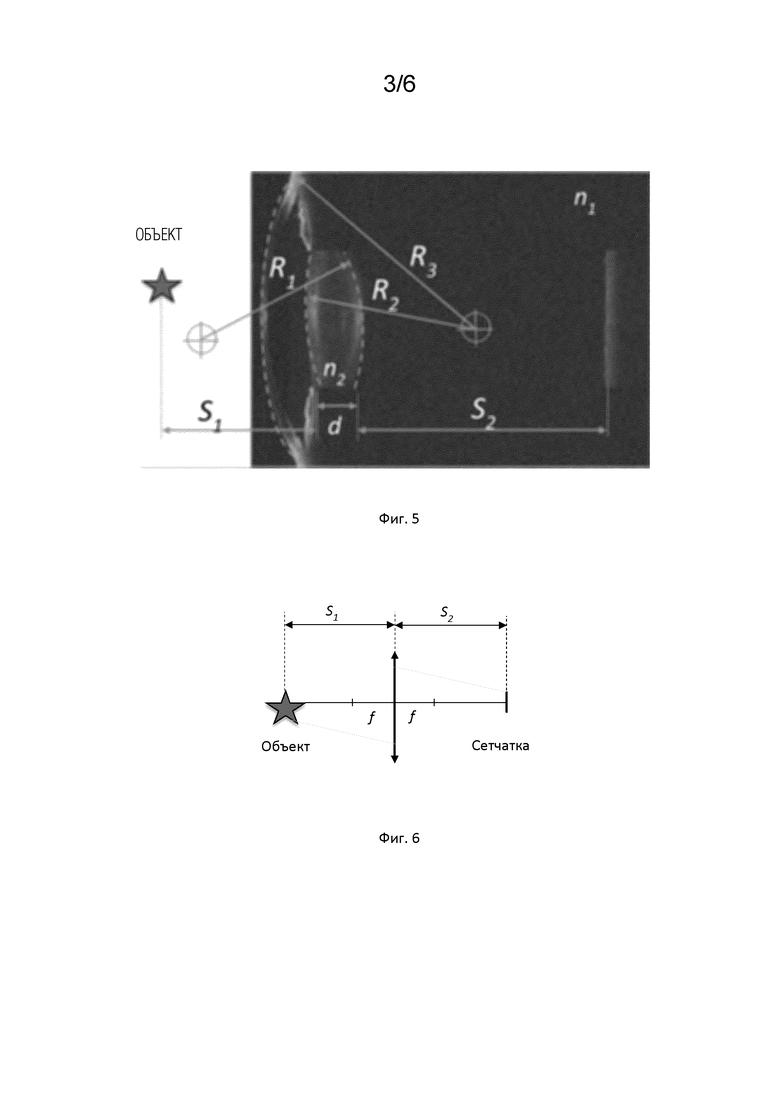
[0026] На фиг. 5 приведено изображение внутренней структуры глаза.
[0027] На фиг. 6 изображена эквивалентная оптическая схема глаза.
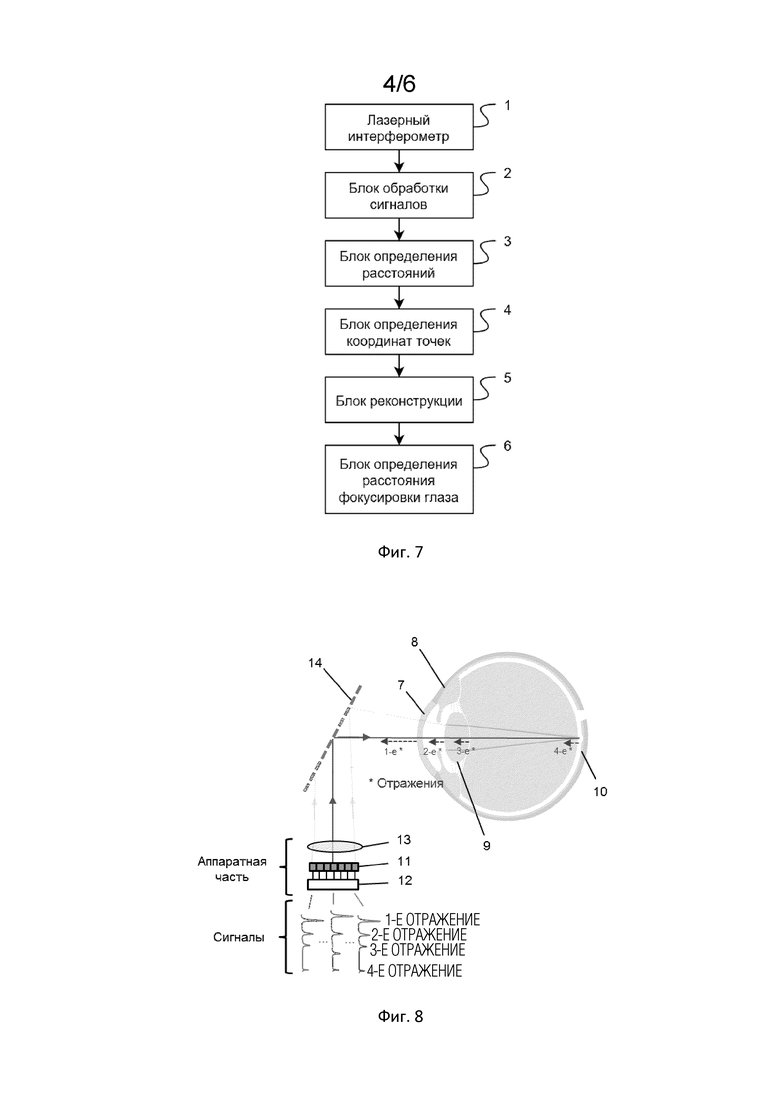
[0028] На фиг. 7 приведена блок-схема предложенного устройства определения расстояния фокусировки глаза.
[0029] На фиг. 8 изображена схема работы устройства определения расстояния фокусировки глаза согласно первому варианту осуществления.
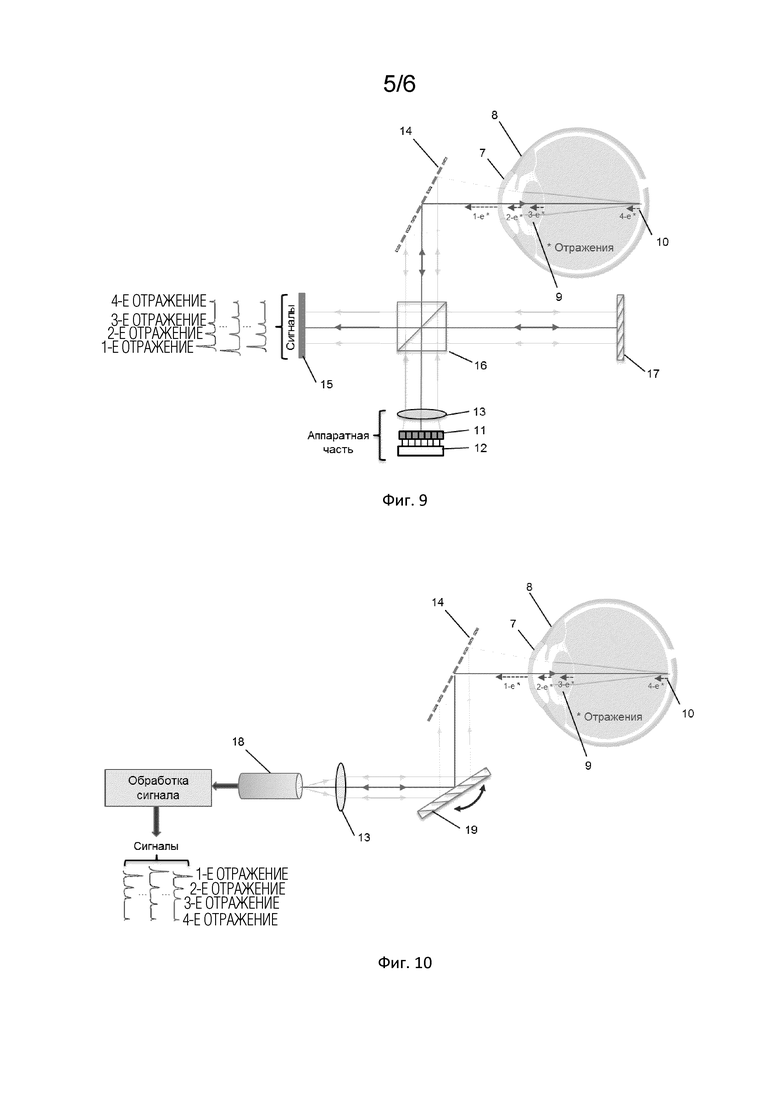
[0030] На фиг. 9 изображена схема работы устройства определения расстояния фокусировки глаза согласно второму варианту осуществления.
[0031] На фиг. 10 изображена схема работы устройства определения расстояния фокусировки глаза согласно третьему варианту осуществления.
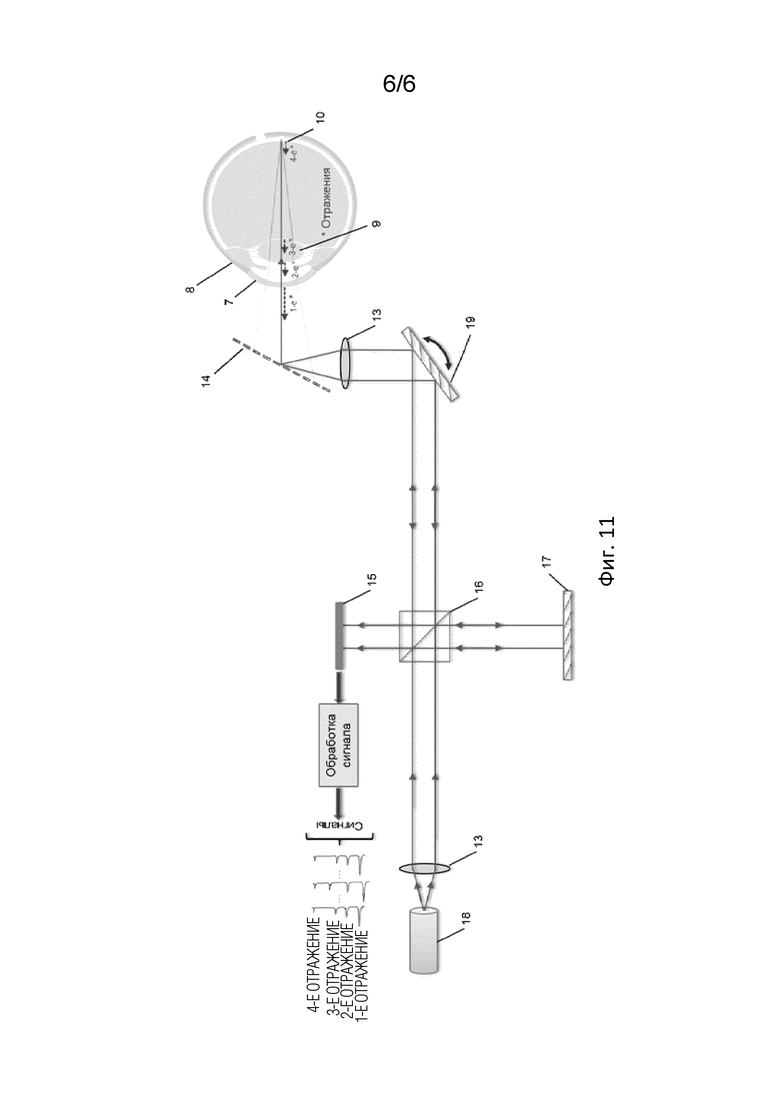
[0032] На фиг. 11 изображена схема работы устройства определения расстояния фокусировки глаза согласно четвертому варианту осуществления.
Подробное описание изобретения
[0033] Сущность настоящего изобретения будет более понятна из приведенного ниже подробного описания конкретных вариантов его осуществления.
[0034] Предложенное устройство определения расстояния фокусировки глаза для наголовного устройства отображения содержит лазерный интерферометр 1, блок 2 обработки сигналов, блок 3 определения расстояний, блок 4 определения координат точек, блок 5 реконструкции, блок 6 определения расстояния фокусировки глаза (см. фиг. 7).
[0035] Лазерный интерферометр 1 формирует множество частотно-модулированных лазерных лучей в различных направлениях, образующих пучок лучей, и регистрирует излучение, отраженное от одной или нескольких поверхностей глаза, в том числе от поверхностей внешней (поверхности роговицы 7, склеры 8) и внутренней (поверхности хрусталика 9, сетчатки 10) структур глаза, формируя интерферометрический сигнал для каждого луча.
[0036] Блок 2 обработки сигналов осуществляет обработку интерферометрических сигналов и формирует спектр сигнала для каждого сигнала из упомянутого множества интерферометрических сигналов, формируемых лазерным интерферометром.
[0037] Спектры сигналов лучей, отраженных от поверхностей структуры глаза, имеют характерные пики, соответствующие отражениям от разных поверхностей. Например, спектры сигналов лучей, попавших в зрачок глаза, будут иметь четыре пика, соответствующих отражениям от отражающих поверхностей внутренней и внешней структур глаза - поверхности роговицы 7, передней поверхности хрусталика 9 глаза, задней поверхности хрусталика 9 глаза и поверхности сетчатки 10. Таким образом, пики спектра могут быть интерпретированы как разные отражающие поверхности. Например, первый пик соответствует поверхностям склеры и роговицы глаза, второй пик соответствует радужной оболочке и передней поверхности хрусталика глаза, третий пик соответствует задней поверхности хрусталика глаза, четвертый пик соответствует поверхности роговицы глаза.
[0038] Блок 3 определения расстояний осуществляет, для каждого луча, анализ спектра сигнала с использованием методов интерферометрии и определяет одно или несколько расстояний до одной или нескольких поверхностей, отразивших лазерный луч (см. фиг. 3).
[0039] Блок 4 определения координат точек определяет, на основе информации о расстояниях до отражающих поверхностей для каждого луча и информации о направлении луча (расположении луча в пространстве), в системе координат, связанной с наголовным устройством отображения, координаты точек поверхностей структуры глаза. При этом, каждая точка может быть отнесена к конкретной поверхности структуры глаза. Например: для луча с четырьмя отражениями первая точка (соответствующая первому пику на спектре сигнала) соответствует поверхности роговицы, вторая точка соответствует передней поверхности хрусталика, третья точка соответствует задней поверхности хрусталика, четвертая точка соответствует поверхности сетчатки; для луча с двумя отражениями первая точка соответствует поверхности роговицы, вторая точка соответствует поверхности радужной оболочки; для луча с одним отражением единственная точка соответствует поверхности склеры глаза или иной поверхности (если луч не попадает на глаз пользователя).
[0040] Блок 5 реконструкции формирует, на основе информации о точках поверхностей структуры глаза, модель структуры глаза. Модель структуры глаза может быть сформирована, например, путем аппроксимации точек геометрическими поверхностями. Например, группы точек, соответствующие поверхности роговицы, передней поверхности хрусталика и задней поверхности хрусталика, могут быть аппроксимированы сферическими поверхностями, а группа точек, относящихся к сетчатке может быть аппроксимирована плоскостью. Таким образом, модель структуры глаза может представлять собой совокупность аппроксимирующих поверхностей, соответствующих поверхностям элементов структуры глаза.
[0041] Блок реконструкции может быть выполнен с возможностью определения направления оптической оси глаза как направления линии, на которой расположены центры аппроксимирующих сферических поверхностей, соответствующих поверхностям структуры глаза.
[0042] Блок 6 определения расстояния фокусировки глаза определяет, на основе модели внутренней структуры глаза, расстояние фокусировки глаза. Более конкретно, расстояние фокусировки глаза может быть получено на основе расстояний между поверхностями структуры глаза (см. фиг 5, S2, d) и кривизны этих поверхностей (см. фиг 5, R1-1, R2-1, R3-1), которые могут быть определены на основе модели структуры глаза, полученной блоком реконструкции. Расстояние фокусировки может быть получено из совокупности следующих уравнений:

Где:
(1) - уравнение тонкой линзы (уравнение эквивалентной оптической схемы),
(2) - уравнение оптической системы глаза,
f - фокусное расстояние эквивалентной оптической схемы
R1 - радиус кривизны роговицы;
R2 - радиус кривизны передней поверхности хрусталика;
R3 - радиус кривизны задней поверхности хрусталика;
d - толщина хрусталика;
S1 - расстояние фокусировки (величина, подлежащая вычислению);
S2 - расстояние между хрусталиком и сетчаткой;
n1 - показатель преломления среды глаза (стекловидного тела);
n2 - показатель преломления среды хрусталика.
Из упомянутых выше величин, величины R1, R2, R3, d, S2 определяются на основании модели внутренней структуры глаза (см. фиг. 5), величины n1, n2 являются заранее известными, величина S1 является искомой.
[0043] Таким образом, предложенное устройство обеспечивает точное измерение расстояния фокусировки глаза на основе модели внутренней структуры глаза.
[0044] Далее описываются конкретные варианты осуществления, отличающиеся способами формирования интерферометрических сигналов и способами формирования множества частотно модулированных лазерных лучей в различных направлениях.
Первый вариант осуществления
[0045] Согласно первому, предпочтительному варианту осуществления настоящего изобретения, проиллюстрированному на фиг. 8, интерферометр устройства определения расстояния фокусировки глаза представляет собой автодинный интерферометр (англ. self-mixing interferometer, SMI) и содержит массив 11 лазеров, например, массив поверхностно-излучающих лазеров с вертикальным резонатором (англ. vertical-cavity surface-emitting laser, VCSEL), драйвер 12 массива лазеров и оптическую систему.
[0046] Драйвер 12 массива лазеров обеспечивает выборочную подачу частотно-модулированного управляющего сигнала, обеспечивающего модуляцию тока накачки лазера, на лазеры в массиве, одновременно на один лазер, группу лазеров или все лазеры массива. Количество одновременно работающих лазеров ограниченно максимально допустимой безопасной для глаза мощность лазерного излучения. При этом каждому лазеру массиве соответствует конкретное и отличное от других заранее известное направление луча, зависящее от положения лазера массива относительно других элементов устройства определения расстояния фокусировки глаза, участвующих в формировании направления луча.
[0047] Оптическая система участвует в формировании направлений лучей и обеспечивает доставку излучения до глаза пользователя и может содержать, например, одну или несколько линз 13 и дихроичное зеркало 14. Дихроичное зеркало является лишь одним примером решения, обеспечивающего доставку излучения до глаза пользователя. Альтернативно могут использоваться, например, световоды.
[0048] Под направлением луча в рамках данного описания следует понимать расположение в пространстве относительно системы координат, связанной с наголовным устройством отображения, оси луча лазера на последнем участке его пути распространения до попадания на отражающие поверхности глаза, то есть на участке пути распространения луча после его выхода из оптической системы интерферометра.
[0049] Согласно данному варианту осуществления, интерферометр формирует автодинный интерферометрический сигнал. Луч, испущенный конкретным лазером, доставляется до глаза при помощи элементов оптической системы, отражается поверхностями структуры глаза, поступает обратно в резонатор соответствующего лазера и оказывает влияние на его режим работы (возникает автодиный эффект). Это влияние обнаруживается путем измерения колебаний напряжения смещения лазера на стороне драйвера, либо путем измерения колебаний мощности лазера с помощью фотодиода (на схемах не отображен), встроенного в корпус лазера. Соответствующий сигнал, полученный от драйвера или фотодиода, является автодинным интерферометрическим сигналом.
[0050] Таким образом, для формирования множества лучей используется массив лазеров, а для формирования интерферометрического сигнала используется автодинный эффект. Рассматриваемый вариант осуществления отличается минимальным количеством элементов, простой конструкцией и малой стоимостью.
[0051] Здесь и в других вариантах осуществления функции формирования множества лучей, доставки до глаза пользователя и соответствующие элементы (например, оптическая система, оптико-механическая система сканирования) условно отнесены к интерферометру, хотя, при необходимости, могу рассматриваться отдельно.
Второй вариант осуществления
[0052] Согласно второму варианту осуществления настоящего изобретения, проиллюстрированному на фиг. 9, интерферометр устройства определения расстояния фокусировки глаза представляет собой двухлучевой интерферометр, содержащий массив 11 лазеров, драйвер 12 массива лазеров, детектор 15, светоделитель 16, эталонное зеркало 17, и оптическую систему.
[0053] Массив лазеров, драйвер массива лазеров и оптическая система соответствуют таковым для первого варианта осуществления и повторно не описываются.
[0054] Второй вариант осуществления отличается от первого способом формирования интерферометрического сигнала. Луч, испускаемый конкретным лазером массива, разделяется светоделителем 16 (полупрозрачным зеркалом) на два луча, один из которых отражается от эталонного зеркала 17, а другой - доставляется до глаза пользователя и отражается от его поверхностей. Оба луча возвращаются в светоделитель 16 и направляются на детектор 15 (см. фиг. 9), на котором они интерферируют и формируют интерферометрический сигнал.
[0055] Рассматриваемый вариант осуществления имеет больше составных частей, является менее компактным и более дорогим, но обеспечивает более высокое соотношение сигнал/шум при той же мощности лазерного излучения.
Третий вариант осуществления
[0056] Согласно третьему варианту осуществления настоящего изобретения, проиллюстрированному на фиг. 10, интерферометр устройства определения расстояния фокусировки глаза представляет собой автодинный интерферометр и содержит одиночный лазер 18, драйвер лазера, оптико-механическую систему сканирования и оптическую систему.
[0057] Оптическая система в настоящем варианте осуществления соответствуют таковой для предыдущих вариантов осуществления и повторно не описывается.
[0058] Формирование интерферометрического сигнала осуществляется с использованием автодинного эффекта тем же образом, что и в первом варианте осуществления, а именно путем измерения колебаний напряжения смещения лазера на стороне драйвера, либо путем измерения колебаний мощности лазера с помощью фотодиода, встроенного в корпус лазера.
[0059] Оптико-механическая система сканирования обеспечивает изменение направления луча лазера и может быть выполнена с использованием любого известного способа отклонения света, например, с использованием поворотных зеркал, микроэлектромеханических (МЭМС) зеркал, подвижных линз, акустооптических отражателей, и т.п. В примере рассматриваемого варианта осуществления, схематически проиллюстрированном на фиг. 10, элементом оптико-механической системы сканирования является подвижное зеркало 19.
[0060] Оптико-механическая система сканирования может содержать, например, систему подвижных зеркал, приводимых в движение электромоторами и обеспечивающих сканирование лазерным лучом, датчики положения зеркал и контроллер, управляющий работой электромоторов, считывающий показания датчиков и обеспечивающий формирования сигнала, характеризующего состояние системы сканирования в каждый момент времени, позволяющего определить положение луча лазера в каждый момент времени (информацию направлении луча).
[0061] Применительно к этому варианту осуществления, в котором используется оптико-механическая система сканирования, так как используется одиночный лазер, луч которого может непрерывно перемещаться в пространстве, под конкретным лучом лазера следует понимать луч лазера, рассматриваемый в пределах малого интервала времени (например в пределах периода модуляции лазера), в котором положение луча в пространстве изменяется пренебрежимо малым образом, а под множеством лучей следует понимать множество конкретных лучей, рассматриваемых в пределах множества малых интервалов времени. Рассматриваемый вариант осуществления является менее надежным и более громоздким.
Четвертый вариант осуществления
[0062] Согласно четвертому варианту осуществления настоящего изобретения, проиллюстрированному на фиг. 11, интерферометр устройства определения расстояния фокусировки глаза представляет собой двухлучевой интерферометр, содержащий одиночный лазер 18, драйвер лазера, оптико-механическую систему сканирования, детектор 15, светоделитель 16, эталонное зеркало 17 и оптическую систему.
[0063] Четвертый вариант осуществления отличается от третьего способом формирования интерферометрического сигнала, который является аналогичным таковому во втором варианте осуществления и повторно подробно не описывается.
[0064] Рассматриваемый вариант осуществления имеет больше составных частей, является менее компактным и более дорогим, но обеспечивает более высокое соотношение сигнал/шум при той же мощности лазерного излучения.
[0065] Предложенное устройство определения расстояния фокусировки глаза может быть использовано в составе наголовного устройства отображения с регулировкой фокусного расстояния, содержащего, соответственно, устройство определения расстояния фокусировки глаза и систему визуализации с регулируемым фокусным расстоянием. Система визуализации с регулируемым фокусным расстоянием связана с устройством определения расстояния фокусировки глаза и получает от него сигнал об определенном расстоянии фокусировки глаза. При этом, система визуализации выполнена с возможностью регулировки фокусного расстояния на основе определенного расстояния фокусировки. Алгоритм определения фокусного расстояния системы визуализации на основе определенного расстояния фокусировки зависит от конкретного сценария применения. Например, система визуализации может настраивать фокусное расстояние так, чтобы отображаемые виртуальные объекты были всегда в фокусе глаза пользователя. Таким образом, обеспечивается более точная регулировка фокусного расстояния наголовного устройства отображения в соответствии с расстоянием фокусировки глаза пользователя.
[0066] Рассмотренные в настоящем описании конкретные варианты осуществления заявляемого изобретения не являются ограничивающими и приведены только для примера.
Группа изобретений относится к медицинской технике, более конкретно к устройству и способу определения расстояния фокусировки глаза для наголовного устройства отображения. Заявлено формирование множества частотно модулированных лазерных лучей в различных направлениях, формирование интерферометрического сигнала для каждого луча, формирование спектра сигнала для каждого интерферометрического сигнала, анализ спектра сигнала и определение расстояний до отражающих поверхностей для каждого луча упомянутого множества лучей, определение координат точек поверхностей глаза для каждого из лучей на основе упомянутых определенных расстояний и информации о направлении луча, формирование модели внутренней структуры глаза на основе определенных координат точек поверхностей глаза, определение расстояния фокусировки глаза на основе модели внутренней структуры глаза. Достигаемый технический результат заключается в определении расстояния фокусировки глаза на основе модели внутренней структуры глаза. 3 н. и 6 з.п. ф-лы, 11 ил.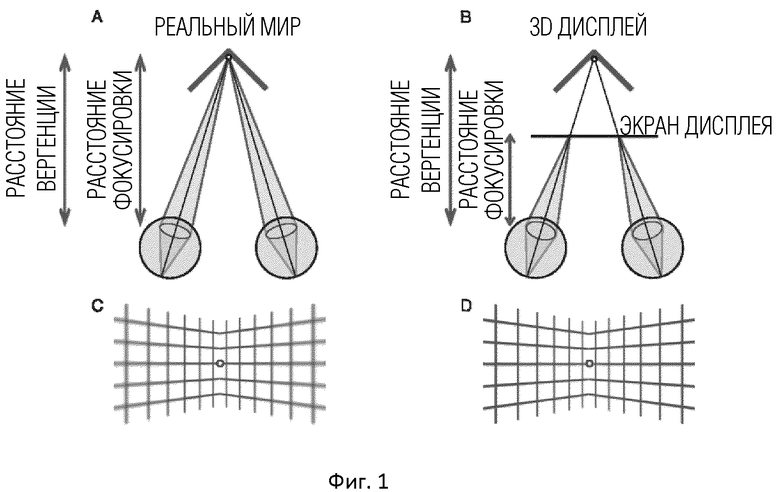
1. Устройство определения расстояния фокусировки глаза для наголовного устройства отображения, содержащее:
интерферометр, выполненный с возможностью формирования частотно-модулированных лазерных лучей в различных направлениях и формирования интерферометрического сигнала для каждого из упомянутых лучей,
причем каждому направлению луча соответствует информация направления луча,
причем по меньшей мере часть упомянутых лучей попадает на отражающие поверхности внутренней структуры глаза,
блок обработки сигналов, выполненный с возможностью формирования спектра сигнала для каждого интерферометрического сигнала из интерферометрических сигналов,
блок определения расстояний, выполненный с возможностью анализа спектра сигнала и определения расстояний до отражающих поверхностей для каждого из упомянутых лучей,
блок определения координат точек, выполненный с возможностью определения в системе координат, связанной с наголовным устройством отображения, координат точек поверхностей глаза для каждого из лучей на основе упомянутых определенных расстояний до отражающих поверхностей и информации о направлении луча,
блок реконструкции, выполненный с возможностью формирования модели внутренней структуры глаза на основе определенных координат точек поверхностей глаза,
блок определения расстояния фокусировки глаза, выполненный с возможностью определения расстояния фокусировки глаза на основе упомянутой модели внутренней структуры глаза.
2. Устройство по п. 1, в котором интерферометр представляет собой автодинный интерферометр, содержащий массив лазеров и драйвер массива лазеров, причем
драйвер массива лазеров выполнен с возможностью подачи частотно-модулированного управляющего сигнала на каждый лазер массива лазеров,
интерферометрическим сигналом является автодинный сигнал лазера.
3. Устройство по п. 1, в котором интерферометр представляет собой автодинный интерферометр, содержащий лазер, драйвер лазера и оптико-механическую систему сканирования, причем
драйвер лазера выполнен с возможностью подачи частотно-модулированного управляющего сигнала на лазер,
интерферометрическим сигналом является автодинный сигнал лазера.
4. Устройство по п. 2, в котором массив лазеров представляет собой массив поверхностно излучающих лазеров с вертикальным резонатором (VCSEL).
5. Устройство по п. 1, в котором интерферометр представляет собой двухлучевой интерферометр, содержащий массив лазеров, драйвер массива лазеров, детектор, светоделитель и эталонное зеркало, причем
драйвер массива лазеров выполнен с возможностью подачи частотно-модулированного управляющего сигнала на каждый лазер массива лазеров,
интерферометрическим сигналом является сигнал, формируемый детектором.
6. Устройство по п. 1, в котором интерферометр представляет собой двухлучевой интерферометр, содержащий лазер, драйвер лазера, детектор, светоделитель, эталонное зеркало и оптико-механическую систему сканирования, причем
драйвер лазера выполнен с возможностью подачи частотно-модулированного управляющего сигнала на лазер,
интерферометрическим сигналом является сигнал, формируемый детектором.
7. Устройство по любому из пп. 1-3, 5-6, в котором блок реконструкции дополнительно выполнен с возможностью определения направления оптической оси глаза.
8. Способ определения расстояния фокусировки глаза для наголовного устройства отображения, содержащий этапы, на которых
формируют частотно-модулированные лазерные лучи в различных направлениях, причем каждому направлению луча соответствует информация направления луча, причем по меньшей мере часть упомянутых лучей попадает на отражающие поверхности внутренней структуры глаза,
формируют интерферометрический сигнал для каждого из упомянутых лучей,
формируют спектр сигнала для каждого интерферометрического сигнала из интерферометрических сигналов,
анализируют спектр сигнала и определяют расстояния до отражающих поверхностей для каждого из упомянутых лучей,
определяют в системе координат, связанной с наголовным устройством отображения, координаты точек поверхностей глаза для каждого из лучей на основе упомянутых определенных расстояний до отражающих поверхностей и информации о направлении луча,
формируют модель внутренней структуры глаза на основе определенных координат точек поверхностей глаза,
определяют расстояние фокусировки глаза на основе упомянутой модели внутренней структуры глаза.
9. Наголовное устройство отображения с регулировкой фокусного расстояния, содержащее устройство определения расстояния фокусировки глаза по любому из пп. 1-7 и систему визуализации с регулируемым фокусным расстоянием, причем
система визуализации с регулируемым фокусным расстоянием выполнена с возможностью автоматического регулирования фокусного расстояния на основе расстояния фокусировки глаза, полученного от устройства определения расстояния фокусировки глаза.
| US 2017124928 A1, 04.05.2017 | |||
| US 2018205943 A1, 19.07.2018 | |||
| НАГОЛОВНОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ НАГОЛОВНЫМ УСТРОЙСТВОМ ОТОБРАЖЕНИЯ | 2014 |
|
RU2656714C2 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ | 2014 |
|
RU2671298C2 |

