Перекрестные ссылки на родственную заявку
По данной заявке испрашивается приоритет и положительный эффект предварительной заявки США № 12/619606 под заголовком «Imaging Surgical Target Tissue By Nonlinear Scanning», поданной 16 ноября 2009 года, которая целиком включена сюда по ссылке.
Область техники, к которой относится изобретение
Этот патентный документ относится к системам и способам для хирургических приложений, включая офтальмологическую хирургию.
Уровень техники
В последние годы было разработано множество различных усовершенствованных хирургических лазерных систем для офтальмологической хирургии, ориентированной на целевые участки роговой оболочки, хрусталика, сетчатки и другие структуры глаза. В такой хирургической системе может использоваться механизм формирования изображений, позволяющий получить изображения операционной области-мишени, чтобы помочь оператору хирургической системы, например хирургу, подавать лазерные импульсы в операционную область-мишень глаза с высокой точностью.
Сущность изобретения
В этом документе раскрыты примеры и варианты реализации систем и способов лазерной хирургии на основе формирования изображений ткани-мишени посредством нелинейного сканирования в процессе формирования изображений.
Например, способ ведения хирургической операции на глазе может включать в себя следующие этапы: позиционирование глаза относительно системы формирования изображений; создание первых данных сканирования путем определения глубины глазной области-мишени на первом наборе точек вдоль первой дуги; создание вторых данных сканирования путем определения глубины области-мишени глаза на втором наборе точек вдоль второй дуги; определение параметров области-мишени на основе первых и вторых данных сканирования; и регулировка одного или нескольких хирургических позиционных параметров в соответствии с определенными параметрами области-мишени.
В некоторых вариантах реализации этап определения глубины включает в себя формирование изображений области-мишени глаза по меньшей мере одним из следующих способов: оптическая когерентная томография (OCT), ультразвуковой способ, микроскопический способ и/или интерференционный способ.
В некоторых вариантах реализации областью-мишенью глаза является одно из: область-мишень роговой оболочки, передняя поверхность хрусталика, задняя поверхность хрусталика, область-мишень хрусталика, офтальмологический слой или поверхность, ограниченная зрачком.
В некоторых вариантах реализации по меньшей мере одна из дуг, первая и/или вторая, образуют по меньшей мере часть замкнутого контура.
В некоторых вариантах реализации первая дуга является частью первой линии пересечения, где первая поверхность сканирования пересекает область-мишень глаза, а вторая дуга является частью второй линии пересечения, где вторая поверхность сканирования пересекает область-мишень глаза.
В некоторых вариантах реализации первая дуга является частью первой линии пересечения, где первый цилиндр пересекает область-мишень глаза, а вторая дуга является частью второй линии пересечения, где второй цилиндр пересекает область-мишень глаза.
В некоторых вариантах реализации первый цилиндр и второй цилиндр являются концентрическими с общей осью Z.
В некоторых вариантах реализации ось Z второго цилиндра смещена относительно оси Z первого цилиндра.
В некоторых вариантах реализации этап определения параметров области-мишени включает в себя извлечение характеристик сканирования из первых и вторых данных сканирования.
В некоторых вариантах реализации этап извлечения характеристик сканирования включает в себя извлечение первой амплитуды и первой фазы из первых данных сканирования и извлечение второй амплитуды и второй фазы из вторых данных сканирования.
В некоторых вариантах реализации этап определения параметров области-мишени включает в себя определение позиционного параметра центра области-мишени на основе первой амплитуды, первой фазы, второй амплитуды и второй фазы.
В некоторых вариантах реализации этап определения параметров области-мишени включает в себя определение параметра формы объекта области-мишени на основе первой амплитуды, первой фазы, второй амплитуды и второй фазы.
В некоторых вариантах реализации этап определения параметров области-мишени включает в себя определение параметра ориентации объекта области-мишени на основе первой амплитуды, первой фазы, второй амплитуды и второй фазы.
В некоторых вариантах реализации этап определения параметров области-мишени включает в себя определение обновления позиционного параметра, связанного с позицией области-мишени и точкой отсчета.
В некоторых вариантах реализации регулировка хирургического позиционного параметра включает в себя регулировку позиционного параметра центра хирургического шаблона для выравнивания центра хирургического шаблона по центру области-мишени.
В некоторых вариантах реализации способ больше не предусматривает никаких сканирований после первого сканирования и второго сканирования.
В некоторых вариантах реализации время от начала первого этапа сканирования до окончания этапа определения хирургических позиционных параметров не превышает одно из следующих значений: 100 миллисекунд, 1000 миллисекунд или 10000 миллисекунд.
В некоторых вариантах реализации по меньшей мере одна из дуг, первая или вторая, является эллиптической дугой.
В некоторых вариантах реализации по меньшей мере одна из дуг, первая или вторая, является открытой дугой, и по меньшей мере одни из первых данных сканирования и вторых данных сканирования, имеют максимум и минимум.
В некоторых вариантах реализации область-мишень глаза является областью хрусталика глаза, а параметры области-мишени включают в себя параметр формы хрусталика, параметр наклона хрусталика и позиционный параметр хрусталика.
В некоторых вариантах реализации этап определения параметров области-мишени включает в себя подбор функции по меньшей мере с одним подбирающимся параметром для первого набора данных сканирования и определение параметров области-мишени с использованием подбирающегося параметра.
В некоторых вариантах реализации способ формирования изображений объекта включает в себя следующие этапы: позиционирование объекта относительно системы формирования изображений, где форма объекта может быть описана на основе одного или нескольких параметров формы; создание данных сканирования путем определения координаты объекта на наборе точек вдоль дуги; и определение параметра формы объекта и позиционного параметра объекта на основе упомянутых данных сканирования.
В некоторых вариантах реализации объектом является часть сферического поверхностного слоя, а определяемым параметром формы объекта является радиус сферического поверхностного слоя.
В некоторых вариантах реализации объектом является передний поверхностный слой хрусталика глаза, параметром формы объекта является радиус переднего поверхностного слоя хрусталика, и позиционным параметром объекта является координата центра передней поверхности хрусталика.
В некоторых вариантах реализации этап определения позиционного параметра объекта включает в себя формирование изображений объекта по меньшей мере одним из следующих способов: оптическая когерентная томография (OCT), ультразвуковой способ, микроскопический способ и/или интерференционный способ.
В некоторых вариантах реализации этап определения параметра формы объекта и позиционного параметра объекта включает в себя создание вспомогательных данных сканирования путем определения координаты объекта на вспомогательном наборе точек вдоль вспомогательной дуги.
В некоторых вариантах реализации этап определения параметра формы объекта и позиционного параметра объекта включает в себя определение параметра формы объекта и позиционного параметра объекта из данных сканирования и вспомогательных данных сканирования.
В некоторых вариантах реализации позиционным параметром объекта является координата Z слоя объекта, а дуга представляет собой часть линии пересечения, где цилиндр сканирования пересекает слой объекта.
В некоторых вариантах реализации этап определения параметра формы объекта включает в себя определение координаты Z слоя объекта во вспомогательном наборе точек вдоль линии пересечения, где вспомогательный цилиндр пересекает слой объекта.
В некоторых вариантах реализации цилиндр сканирования и вспомогательный цилиндр являются по существу концентрическими с общей осью Z.
В некоторых вариантах реализации этап определения параметра формы объекта и позиционного параметра объекта включает в себя: извлечение амплитуды и фазы из данных сканирования и определение центра слоя объекта на основе извлеченной амплитуды и фазы.
В некоторых вариантах реализации позиционным параметром объекта является один из параметров: параметр центра слоя объекта или периметр слоя объекта.
В некоторых вариантах реализации способ больше не предусматривает ни одного сканирования после упомянутого сканирования и вспомогательного сканирования.
В некоторых вариантах реализации определение позиционного параметра объекта и параметра формы объекта выполняют интегральным образом.
В некоторых вариантах реализации объектом является либо закрытый объект, либо открытый объект.
В некоторых вариантах реализации способ ведения хирургической операции на глазе включает в себя следующие этапы: (а) позиционирование глаза относительно хирургической лазерной системы, причем хирургическая лазерная система имеет хирургический позиционный параметр, а глаз имеет хрусталик; (b) определение позиционных данных области-мишени хрусталика вдоль дуги сканирования; (с) определение позиционного параметра хрусталика на основе упомянутых позиционных данных; (d) регулировка хирургического позиционного параметра в соответствии с определенным позиционным параметром хрусталика; и (e) повторение этапов (b)-(d) во время хирургической операции на глазе для перенастройки хирургического позиционного параметра.
В некоторых вариантах реализации областью-мишенью является одно из: передняя поверхность хрусталика, передняя поверхность, ограниченная зрачком, область-мишень хрусталика или задняя поверхность хрусталика.
В некоторых вариантах реализации этап определения позиционных параметров хрусталика включает в себя извлечение амплитуды и фазы из позиционных данных.
В некоторых вариантах реализации этап определения позиционных параметров хрусталика включает в себя определение позиционного параметра центра области-мишени хрусталика на основе амплитуды и фазы позиционных данных.
В некоторых вариантах реализации регулировка хирургического позиционного параметра включает в себя регулировку позиционного параметра центра хирургического шаблона для выравнивания хирургического шаблона по трем измерениям относительно характеристического признака хрусталика.
Краткое описание чертежей
Фиг.1А-С - смещение нацеливания в офтальмологических лазерных системах;
фиг.2 - существующий способ нацеливания;
фиг.3 - вариант одного способа ведения хирургической операции на глазе;
фиг.4А-Е - иллюстрации этапов способа по фиг.3;
фиг.5А-В - иллюстрации, относящиеся к регулировке хирургического позиционного параметра;
фиг.6А-В - иллюстрации вариантов способов формирования изображений;
фиг.7 - пример лазерной хирургической системы с наведением по сформированным изображениям, в которой обеспечен модуль формирования изображений, обеспечивающий формирование изображений цели для управления лазером;
фиг.8-16 - примеры лазерных хирургических систем с наведением по сформированным изображениям с различной степенью интеграции лазерной хирургической системы и системы формирования изображений;
фиг.17 - пример способа выполнения лазерной хирургической операции с использованием лазерной хирургической системы с наведением по сформированным изображениям.
Подробное описание изобретения
Многие хирургические устройства глаза включают в себя стыковочный столик, который входит в контакт с глазом и обеспечивает его неподвижность относительно объектива хирургической системы. Для ведения хирургической процедуры в некоторых системах создается прицельный шаблон, который указывает центр объектива, где фокусируется хирургический лазер. Эти системы отображают прицельный шаблон поверх изображения глаза, направляя действия хирурга таким образом, чтобы обеспечить точное попадание в намеченную область-мишень глаза.
На фиг.1А-В показаны примеры работы указанных хирургических систем с наведением по изображениям. Когда стыковочный столик или объектив будет зафиксирован хирургом на глазе, прицельный шаблон 40 может оказаться не точно по центру глаза, то есть центр прицельного шаблона 40 может быть смещен относительно центра глаза.
На фиг.1А показан случай, когда прицельный шаблон 40 плохо сцентрирован относительно какой-либо из выступающих структур глаза, такой как зрачок 10, радужная оболочка 20 глаза или лимб 30 роговицы. Это несовпадение мешает глазному хирургу подводить лазерные импульсы на намеченную мишень в глазу с высокой точностью.
Можно разработать усовершенствованную хирургическую лазерную систему с наведением по изображению для извлечения информации о степени несовпадения и регулировки местоположения прицельного шаблона 40, центрируемого относительно выбранной структуры глаза, такой как зрачок 10. На фиг.1В показано достигнутое выравнивание в указанной системе, которое фактически исключает смещение, показанное на фиг.1А. В указанной усовершенствованной системе прицельный шаблон 40 может быть сдвинут к центру, что позволяет обеспечить подачу хирургического лазерного луча с достаточно высокой точностью.
Чем выше точность системы нацеливания, тем более эффективной будет офтальмологическая хирургическая операция. Таким образом, когда возможна ручная регулировка прицельного шаблона 40, для повышения точности систем с наведением по изображениям и решения проблемы несовпадения можно использовать автоматизированные процедуры выравнивания на компьютерной основе.
На фиг.2 показан один пример автоматизированной операции выравнивания, основанной на компьютере. В этом примере сканирование выполняется вдоль прямых линий, причем линейные сканирования выполняются многократно на итеративной основе. Хотя каждое линейное сканирование обеспечивает лишь неполную информацию, касающуюся упомянутого несовпадения, повторные итерации позволяют эффективно перемещать центр прицельного шаблона 40 все ближе и ближе к центру области-мишени.
В данном документе представлены примеры и реализации систем, устройства и способов для лазерной хирургии на основе формирования изображений ткани-мишени посредством нелинейного сканирования во время формирования изображений. Информацию, относящуюся к формированию изображений, которую получают в результате нелинейного сканирования, используют для наведения лазерного луча для выполнения хирургической операции на ткани-мишени.
На фиг.3 показан способ ведения хирургической операции 100 на глазе, который включает в себя следующие этапы: позиционирование глаза относительно системы (110) формирования изображений; создание первых данных сканирования путем определения глубины области-мишени глаза на первом наборе точек вдоль первой дуги (120); создание вторых данных сканирования путем определения глубины области-мишени глаза на втором наборе точек вдоль второй дуги (130); определение параметров области-мишени на основе первых и вторых данных (140) сканирования; и регулировку одного или нескольких хирургических позиционных параметров в соответствии с определенными параметрами (150) области-мишени.
Этап 110 позиционирования может включать в себя множество самых разных известных способов, в том числе применение интерфейса пациента подходящего типа. Одна из возможностей состоит в уменьшении высоты подставки, поддерживающей интерфейс пациента и объектив хирургической системы у глаза. В состав интерфейса пациента может входить гибкий полый цилиндр, частично выполненный из эластичного материала, охватывающий систему оптического нацеливания хирургической системы, например объектив. Интерфейс пациента может включать в себя присоски. После размещения интерфейса пациента на глазу под гибкий полый цилиндр можно подать вакуум для установления механического соединения и стабилизации усилия между глазом и интерфейсом пациента. Присоска может обеспечить подачу вакуума к большей части глаза или к кольцеобразной области глаза.
В других вариантах реализации интерфейс пациента может включать в себя рифленую поверхность, которая обеспечивает удержание глаза благодаря образованию небольших пологих впадин на поверхности глаза. В этих вариантах позиционирование глаза возможно без применения вакуума. В некоторых других вариантах возможно применение небольшого давления для установления механического соединения. Возможны варианты установки механического соединения через какую-либо часть глаза: внутри операционной области, по периметру операционной области или внешней области глаза. В ряде вариантов возможно позиционирование глаза другими средствами, включая немеханические соединения.
Степень механического соединения может быть различной: в некоторых реализациях глаз может быть жестко соединен с интерфейсом пациента, что предотвращает перемещение глаза относительно интерфейса пациента. В других вариантах соединение может быть средней жесткости, что допускает некоторую степень относительного перемещения глаза. В некоторых случаях может быть разрешено относительное перемещение определенного типа, например перемещение вдоль оптической оси или поперечно оптической оси. В ряде вариантов позиционирование может не предусматривать прямой механический контакт с интерфейсом пациента.
Позиционирование может также включать в себя уплощение контактной поверхности глаза с различной степенью. В некоторых случаях контактная поверхность глаза является по существу плоской, в других случаях эта контактная поверхность может быть плоской только частично, а еще в ряде случаев естественная кривизна глаза может оставаться фактически неизменной.
Вновь обратимся к фиг.1А-С, где показана возможность использования хирургического прицельного шаблона 40 для хирургической процедуры на глазе. Эталонная рамочная структура, определенная этим прицельным шаблоном 40, может быть использована хирургом для направления хирургического лазерного луча в точно определенное место в операционной области глаза. Прицельный шаблон 40 может отображаться, например, на устройстве отображения типа видеомикроскопа или иного типа. Прицельный шаблон 40 может быть наложен на изображение глаза в видеомикроскопе. В других вариантах прицельный шаблон 40 может представлять собой лишь составной элемент программного обеспечения, который не обязательно где-либо отображается. В ряде таких вариантов программное обеспечение может только отслеживать центр прицельного шаблона 40 и направлять действия хирурга на основе местоположения указанного центра. В полуавтоматических или полностью автоматических вариантах программное обеспечение системы может выполнять описанные ниже этапы наведения без отображения в явном виде прицельного шаблона 40.
В начале хирургических действий прицельный шаблон 40 может быть выровнен по физическому или геометрическому центру интерфейса пациента или объектива. Поскольку на этапе 110 интерфейс пациента крайне редко располагается и фиксируется точно по центру глаза, прицельный шаблон 40, как правило, необходимо сдвигать или регулировать после этапа позиционирования/фиксации, с тем чтобы он был точно выровнен по центру глаза или по идентифицируемой структуре глаза. Здесь понятие «центр глаза» может относиться к центру выбранной структуры глаза, в том числе зрачку 10, радужной оболочке 20, лимбу 320 роговицы или хрусталику 50. Идентифицируемой структурой может быть идентифицируемая структура, лимба роговицы, кровеносный сосуд, фовеа, оптический диск или другая структура.
Глазные структуры, такие как хрусталик 50 и зрачок 10, часто не имеют общего центра. Это может иметь место, например, из-за некоторой внутренней асимметрии глаза или потому что давление, оказываемое интерфейсом пациента, может переместить или отклонить хрусталик 50 относительно зрачка 10.
На фиг.1А-С показано, что в типовой ситуации оператор системы формирования изображений может выполнить первый сдвиг прицельного шаблона 40 относительно его начального положения (положение на фиг.1А со сдвигом относительно центра), для выравнивания с выступающей структурой глаза, такой как зрачок 10, как показано на фиг.1В, после сдвига прицельного шаблона (40'). Это можно сделать вручную или в частично автоматизированном либо в полностью автоматизированном режиме. При выполнении офтальмологических процедур нацеливания на хрусталик 50, если зрачок 10 и хрусталик 50 имеют общий центр, тогда центрирование прицельного шаблона 40 по зрачку 10 является завершающим этапом упомянутого способа регулировки, и хирург может использовать этот один раз сдвинутый прицельный шаблон 40' для проведения хирургической операции на хрусталике.
На фиг.1С показан случай, когда хрусталик 50 не выровнен по отношению к зрачку 10. В этом случае после первого сдвига прицельного шаблона 40' для его выравнивания со зрачком 10 на последующем втором этапе оператор может практически реализовать способ 100 наведения для идентификации того, насколько все еще расходятся один раз сдвинутый центр прицельного шаблона 40' и зрачок 10 и центр хрусталика 50, и выполнить второй сдвиг прицельного шаблона 40' для выравнивания по центру хрусталика 50, как это показано с помощью дважды сдвинутого прицельного шаблона 40'' на фиг.1С.
В некоторых вариантах реализации первый и второй сдвиг прицельного шаблона 40 может выполняться на одном интегрированном этапе путем практической реализации способа 100 наведения для сдвига прицельного шаблона 40 из его начального «зафиксированного» положения к центру хрусталика 50.
После выравнивания прицельного шаблона 40 с нацеливаемой хирургической областью, например, совмещения с центром хрусталика 50, можно применить хирургический лазер для выполнения хирургической операции на хрусталике 50 с использованием эталонной структуры прицельного шаблона 40.
Местоположение прицельного шаблона 40 можно запомнить, например, в компьютерном контроллере хирургической системы. В некоторых вариантах реализации поверх изображения прицельного шаблона 40 и действительного изображения глаза в видеомикроскопе может быть наложен видеоинтерфейс. Среди прочего такая составная картина иллюстрирует степень отклонения центра прицельного шаблона 40 от центра выбранной структуры глаза, такой как зрачок 10. Указанные наложенные составляющие изображения могут быть полезными для выполнения первого сдвига, выравнивающего прицельный шаблон 40, например, со зрачком 10.
Заметим, что первый и второй сдвиги (или единый интегрированный сдвиг) отдаляют прицельный шаблон 40 от центра интерфейса пациента или объектива. При использовании хирургической оптики достаточно высокого качества последующее применение хирургических лазеров может сохранить низкий астигматизм и другие аберрации даже при их использовании применительно к смещенной от центра области-мишени.
Примерами хирургических процедур, в которых выгодно использовать хирургический лазер с точным нацеливанием, включают в себя капсулотомию, то есть вырезание окружности в капсуле хрусталика 50 для вставки внутриглазной линзы (IOL) вместо удаленного хрусталика. Высокоточное центрирование капсулотомического надреза позволяет обеспечить высокоточное центрирование вставляемой внутриглазной линзы (IOL) и получить оптимальный результат хирургической операции по удалению катаракты.
Другим примером является фрагментация или разжижение самого хрусталика, которое выполняется во время подготовки к удалению хрусталика из его капсулы. В общем случае полезно удалить как можно большую часть хрусталика, не допуская прокаливания задней поверхности капсулы хрусталика. При использовании системы нацеливания с низкой точностью хирург вынужден оставлять более толстый слой хрусталика в капсуле, чтобы не допустить прокаливания задней поверхности капсулы. В отличие от этого система, позиционирующая прицельный шаблон 40 с высокой точностью, позволяет осуществлять вырезание очень близко к задней поверхности капсулы, что повышает эффективность хирургической операции по удалению катаракты.
Заметим, что прицельный шаблон 40 может представлять собой шаблон самых разных типов, в том числе одну или несколько концентрических окружностей, шаблон с перекрестием, другой индикатор центра шаблона или один или несколько прямоугольных элементов, а также комбинацию из вышеперечисленного. Шаблон может иметь изменяемые элементы, например, может изменяться цвет одной из линий, либо могут появляться дополнительные линии, указывающие какой-либо из этапов рассматриваемого способа, например успешное завершение позиционирования глаза на этапе 110 или успешная перенастройка хирургических позиционных параметров на этапе 150.
Дополнительно заметим, что применение хирургического лазера может следовать хирургическому шаблону, который в общем случае может отличаться от прицельного шаблона. Хирургический шаблон может относиться к самым разным типам шаблонов, включая окружности, цилиндры, последовательные слои, спирали, радиальную 4-, 6- или 8-кратную свертку и другие дробные шаблоны. В контексте настоящего способа 100 наведения местоположение этого хирургического шаблона может регулироваться в соответствии со сдвинутым прицельным шаблоном на этапе 150. В простейшем случае центр хирургического шаблона может быть выровнен по центру прицельного шаблона 40. Также возможно множество самых разных альтернативных настроек, таких как центрирование хирургического шаблона со сдвигом относительно центра прицельного шаблона или установка начального местоположения хирургического шаблона в конкретной точке прицельного шаблона и т.д.
В некоторых вариантах реализации определение глубины на этапах 120 и 130 может включать в себя: формирование изображения области-мишени глаза следующими способами: оптическая когерентная томография (OCT), ультразвуковой способ, микроскопический способ, интерференционный способ или комбинация этих способов. Способ оптической когерентной томографии может быть реализован в виде томографии во временной области или в частотной области.
В ряде последующих разделов способ 100 наведения описывается в контексте выполнения вышеописанного второго сдвига или интегрального сдвига прицельного шаблона 40. Оба этих варианта реализации включают определение несовпадения прицельного шаблона 40 и центра области-мишени глаза, например, хрусталика 50.
Область-мишень глаза может представлять собой область-мишень в роговой оболочке, переднюю поверхность хрусталика, заднюю поверхность хрусталика, область-мишень хрусталика, офтальмологический слой или поверхность, ограниченную зрачком. Термин «поверхность» используется в широком смысле, то есть относится не только к наружной геометрической поверхности, но и к поверхностным слоям, имеющим некоторую толщину. Поверхностные слои могут определяться, например, их биологическими, оптическими или механическими свойствами и могут иметь толщину от одного микрона или менее до одного миллиметра или более. Также термин «слой» может относиться к слою внутри структуры глаза.
Нацеливание на хирургические области может выполняться в различных офтальмологических хирургических процедурах, включая процедуры на роговой оболочке, процедуры по удалению катаракты, капсулотомию, лизис или фрагментацию хрусталика. Областью-мишенью может быть область-мишень самой офтальмологической процедуры, например поверхность хрусталика или дополнительная область-мишень, например область, где надрез для доступа создается на роговой оболочке для облегчения процедуры на хрусталике.
На фиг.4А показана реализация способа 100. На этапе 110 может быть обеспечен механический контакт интерфейса 210 пациента с роговой оболочкой 220 глаза для позиционирования глаза во время ведения офтальмологической хирургической операции. Например, интерфейс 210 пациента может зафиксировать глаз и его роговую оболочку 220 в результате приложения частичного вакуума.
Этап 120 может включать в себя определение глубины 241-D1, …241-Dn области-мишени глаза в хрусталике 50 на первом наборе точек 241-P1, …241-Pn вдоль первой дуги 241 и запоминание значений 241-D глубины в качестве первых данных сканирования.
Аналогичный этап 130 может включать в себя определение глубины 242-D1, …242-Dn на втором наборе точек 242-P1, …242-Pn вдоль второй дуги 242 и запоминание значений 242-D в качестве вторых данных сканирования.
В некоторых вариантах реализации по меньшей мере одна из дуг, первая или вторая, может составлять часть замкнутого контура или весь замкнутый контур. Контур может представлять собой окружность, эллипс, частично нерегулярный контур или контур подходящей формы. В других вариантах реализации дуга может быть открытой, являясь частью окружности, эллипса или другой подходящей кривой.
В некоторых вариантах реализации дуги, представляющие собой открытые или замкнутые контуры 241 и 242, могут быть центрированы по центру прицельного шаблона 40. Таким образом, после определения смещения центра контуров 241 и 242 относительно центра области-мишени центр прицельного шаблона 40 может быть выровнен с центром области-мишени путем сдвига центра прицельного шаблона 40 на величину смещения контуров 241 и 242. В ряде описанных ниже вариантов первая и вторая дуги 241, 242 имеют общий центр с прицельным шаблоном 40.
Дуги могут представлять собой самые разные линии, отличаясь от прямых линий на фиг.2 значительной кривизной в плоскости XY, то есть в плоскости, перпендикулярной оптической оси (называемой в целом здесь осью Z). Заметим, что даже прямые линии на фиг.2 могут иметь некоторую кривизну в плоскостях, например, с осями Z и X или Z и Y. Однако поскольку на виде в плоскости XY они выглядят как прямые линии, то есть как проекции на плоскость XY, они не называются дугами.
На фиг.4В показано, что в ряде вариантов первая дуга 241 может являться частью первой линии пересечения, где первая поверхность 245 сканирования пересекает область-мишень глаза, то есть переднюю поверхностную область хрусталика 50. Аналогичным образом вторая дуга 242 может являться частью второй линии пересечения, где вторая поверхность сканирования пересекает область-мишень глаза.
Здесь поверхность 245 сканирования может относиться к развертке поверхности сканирующим лучом, когда характеристическая точка сканирующего луча, такая как его фокусная точка, перемещается вдоль линии в области-мишени.
В примере на фиг.4В фокальная точка сканирующего лазерного луча может перемещаться по окружности в плоскости XY. Сканирующий лазер может располагаться по существу параллельно оптической оси Z оптической системы, определяя цилиндр в качестве поверхности 245 сканирования. Как видно из этого примера, первая дуга 241 представляет собой контур, где цилиндрическая поверхность 245 сканирования пересекает эллипсоидальный хрусталик 50. В зависимости от положения центра цилиндрической поверхности 245 сканирования первая дуга 241 может быть окружностью или эллипсом. Плоскость окружности или эллипса 241 может быть перпендикулярно оси Z, то есть она может представлять собой плоскость XY, если центр окружности 241 совпадает с центром хрусталика 50. Другими словами, если окружность 241 имеет общую ось симметрии с хрусталиком 50. Если окружность 241 не имеет общую ось симметрии с хрусталиком 50, или что эквивалентно, центр окружности 241 не совпадает с центром хрусталика 50, то тогда плоскость окружности 241 может быть наклонной, как на фиг.4В.
На фиг.4С показаны варианты, в которых первая и вторая дуги 241 и 242 являются замкнутыми контурами, например, окружностями. В левой части первый и второй цилиндры сканирования и их соответствующие контуры 241 и 242 являются концентрическими с общей оптической осью Z. В правой части контуры 241 и 242 не являются концентрическими, то есть их оси смещены друг относительно друга. Они могут пересекаться или не пересекаться друг с другом. В одних вариантах информацию для регулировки центра мишени лучше извлекать из концентрических окружностей сканирования, в то время как в других вариантах предпочтительно использовать смещенные окружности сканирования.
На фиг.4D показано, как можно определить параметры области-мишени на этапе 140 на основе первых и вторых данных сканирования. В левой части показана круговая дуга 241 сканирования с центром 241-С, смещенным относительно центра 50-С хирургической области-мишени, представляющей собой хрусталик 50 в данном случае. Как было описано во введении, такие или аналогичные ситуации могут возникнуть тогда, когда интерфейс 210 пациента зафиксирован по центру, смещенному относительно центра хирургической области-мишени.
В указанных ситуациях хирургическая оптическая система может действовать таким образом, что она будет компенсировать это смещение, например, путем выравнивания центра прицельного шаблона 40 по центру хрусталика 50-С. Как было описано выше, в различных вариантах центр прицельного шаблона 40 совпадает с общим центром первой и второй дуг 241-С и 242-С сканирования. Таким образом, задача выравнивания указанных центров преобразуется в задачу определения смещения центра, например первой дуги 241-С относительно центра 50-С прицеливания. После определения этого смещения центр прицельного шаблона 40 может быть сдвинут на упомянутую величину смещения для выравнивания в соответствии с центром 50-С хрусталика. Затем может быть определен хирургический шаблон с использованием правильно отцентрированного прицельного шаблона 40, и тогда хирургический лазерный луч можно подавать в соответствии с упомянутым хирургическим шаблоном.
Как описано ниже, указанная регулировка может быть основана не только на центре хирургической области-мишени, но и на различных отличительных признаках хирургической области-мишени, таких как характеристический признак, точечная раскраска, нерегулярный признак, кровеносный сосуд и т.д.
Один из способов проведения указанной регулировки заключается в извлечении первой и второй характеристик сканирования из первых и вторых данных сканирования. Примеры этих характеристик сканирования включают в себя первую амплитуду и первую фазу первых данных сканирования и вторую амплитуду и вторую фазу вторых данных сканирования.
Как показано в правой части фиг.4D, когда первый контур 241 представляет собой смещенную окружность или эллипс на нацеливаемой поверхности, первые данные 241-D1, … 241-Dn сканирования, или глубины, для точек 241-P1, … 241-Pn первой дуги образуют участок синусоидальной кривой. В общем случае эта кривая может представлять собой функцию, которую можно представить суммой гармоник Фурье. Если окружность 241 сканирования точно сцентрирована по центру области-мишени, то есть 241-С совпадает с 50-С, то тогда первые данные сканирования, или глубины, будут представлять функцию-константу.
Если первая дуга представляет собой полную окружность, то тогда синусоидальная кривая может иметь полный период. Как правило, сканирование не начинается на максимуме или минимуме синусоиды, в связи с чем первые данные сканирования или глубины, изображенные в функции расстояния вдоль дуги 241 сканирования, принимают форму синусоиды, начиная с фазового сдвига.
На фиг.4Е показано, что в указанном случае первой характеристикой сканирования может быть, например, фаза F1 и амплитуда А1 синусоиды из первых данных 241-D1, … 241-Dn сканирования, или глубины. Эти характеристики сканирования можно определить путем подбора синусоидальной функции для первых данных сканирования, или глубины, рассматривая регулируемую фазу и амплитуду синусоиды в качестве параметров подбора. Аналогичным образом, подобрав синусоиду ко вторым данным 242-D1, … 242-Dn сканирования, или глубины, можно выделить вторые характеристики сканирования в виде второй амплитуды А2 и второй фазы F2.
В общем случае, если центр контура сканирования, а значит, как правило, центр прицельного шаблона 40 совпадает с центром хрусталика 50, то данные 241-D1, … 241-Dn являются константами, что порождает нулевую амплитуду для синусоиды. Чем больше смещение центра контура 241-С сканирования относительно центра хрусталика 50, тем больше амплитуда А1. Следовательно, амплитуда А1 может характеризовать, насколько далеко смещен центр контура 241-С сканирования, а значит прицельный шаблон 40, относительно центра 50-С области-мишени. Фаза F1 может характеризовать направление смещения общего центра контура 241-С сканирования и прицельного шаблона 40 относительно центра 50-С области-мишени.
Указанные характеристики сканирования в виде фазы и амплитуды можно извлечь, если дуга 241 сканирования не является окружностью, а представляет собой эллипс или даже открытую дугу. В том случае, когда к данным сканирования может быть подобрана не одна синусоида, а сумма нескольких, например, m гармоник Фурье, амплитуды А1, … Am и фазы F1, … Fm каждой из этих гармоник Фурье можно извлечь с помощью стандартных процедур подбора. В качестве характеристик сканирования можно использовать одну или несколько из указанных амплитуд А1, … Am и фаз F1, … Fm или поднабор из этих амплитуд и фаз.
Также в некоторых вариантах реализации характеристики сканирования могут представлять собой множество различных других характеристик, которые полезны для окончательной регулировки центра прицельного шаблона 40. Указанные характеристики сканирования могут представлять собой значения глубины в конкретных точках сканирования, градиенты точек с данными о глубине, данные, относящиеся к триангуляции, различные моменты подобранной синусоиды или характеристика гармоник более высокого порядка. В некоторых вариантах реализации в первых и вторых данных сканирования могут присутствовать максимальное и минимальное значения, и тогда характеристики сканирования могут быть связаны с этими минимумами и максимумами. Характеристики сканирования могут представлять собой подходящий параметр или данные, которые можно использовать для сдвига прицельного шаблона 40.
На фиг.5А показано, что этап 140 определения параметров области-мишени может включать в себя определение позиционного параметра центра области-мишени 50-С на основе первой амплитуды А1, первой фазы F1, второй амплитуды А2 и второй фазы F2. Например, компьютерный контроллер может установить систему координат, отцентрированную по общему центру 241-С контура 241 сканирования и прицельного шаблона 40. Используя первую и вторую амплитуды А1, А2 и фазы F1, F2, можно определить координаты Сх и Cy центра области-мишени 50-С относительно этой системы координат. Координаты Сх и Cy являются искомыми параметрами области-мишени после смещения, с помощью которых должен быть выполнен сдвиг центра прицельного шаблона 40-С для выравнивания по центру области-мишени, такой как хрусталик 50-С.
Если более подробно, то этот этап определения параметров области-мишени можно в общем случае задать в виде:

где TRj обозначает параметры TR1 и TR2 области-мишени, Ai обозначают амплитуды, а Fi обозначают фазы, являющиеся конкретными примерами характеристик сканирования. В рассмотренном выше конкретном случае, когда параметры TRi области-мишени являются декартовыми координатами Сх и Cy центра области-мишени в системе отсчета прицельного шаблона 40, приведенное выше уравнение (1) будет выглядеть следующим образом:

В некоторых вариантах реализации для определения координат Сх и Cy может оказаться достаточным одна окружность или контур сканирования:

В ряде других вариантов параметры TR1 и TR2 области-мишени представляют собой направление и величину смещения центра 50-С мишени относительно центра 241-С контура сканирования, выраженное, например, в радиальных координатах, которые также можно определить из характеристик сканирования, таких как фаза F1, F2 и амплитуда А1, А2.
В некоторых вариантах реализации этап 140 определения параметров области-мишени может включать в себя определение параметра R области-мишени, представляющего радиус кривизны, на основе первой амплитуды, первой фазы, второй амплитуды и второй фазы. Примером этого может быть определение радиуса R кривизны роговой оболочки 220 или хрусталика 50. Этот радиус кривизны можно использовать при определении смещения центра 50-С мишени исходя из общего центра контура 241-С сканирования и прицельного шаблона 40-С:

Синусоидальный характер первых данных 241-D1, … 241-Dn сканирования, или глубины, может определяться несколькими причинами. Одной из главных причин является обсужденное выше смещение центра 40-С прицельного шаблона относительно центра 50-С области-мишени. Однако свой вклад могут также внести и другие факторы. Эти факторы включают в себя возможный наклон оптической оси глаза и отклонение от идеальной сферической формы, например области-мишени, имеющей эллипсоидную форму.
На эти случаи может быть распространена общая терминология, относящаяся к параметрам SPi формы, параметрам OPi ориентации и позиционным параметрам PPi. Простым примером параметра SP формы является радиус R сферической мишени. Эллипсоидные мишени могут характеризоваться тремя параметрами SP1, SP2 и SP3 формы и длиной a, b и с их трех осей. Очевидно, что чем сложнее форма мишени, тем больше понадобится параметров формы для ее удовлетворительного описания.
Идеальные сферические мишени не имеют параметров OPi ориентации, поскольку все направления эквивалентны из-за присущей им сферической симметрии, но ориентация всех мишеней, не обладающих указанной идеальной сферической симметрией, может быть описана через параметры OPi ориентации. Примеры этого включают в себя сферические мишени, имеющие отличительную область, такую как зрачок, на (приблизительно) сферическом глазе. Другие примеры включают в себя эллипсоидные мишени, где в качестве параметров ориентации используют, например, компоненты векторов, характеризующие ориентацию главных осей.
Особый интерес представляет хрусталик 50, который хорошо аппроксимируется эллипсоидной формой с двумя главными осями а и с, так как хрусталик сохраняет свою вращательную симметрию относительно одной оси симметрии, и, следовательно, третья ось b эквивалентна оси а. Таким образом, параметрами SP1 и SP2 формы хрусталика 50 являются а и с. Примерами набора параметров OPi ориентации хрусталика 50 являются две компоненты единичного вектора, описывающего направление оси вращательной симметрии, также называемого вектором наклона.
Наконец, примерами позиционных параметров PPi являются координаты Ci центра хрусталика 50-С. Позиционные параметры PPi, параметры OPi ориентации и параметры SPi формы образуют вместе общий список параметров TRi области-мишени.
В общем случае все эти параметры TRi области-мишени получают из характеристик сканирования, таких как амплитуды Ai и фазы Fi. В качестве альтернативы уравнению (4) эти соотношения могут быть представлены в виде:

Хотя формулы в уравнении (4), показывающие, что параметры SPi формы определяют в качестве промежуточного этапа рассматриваемого способа, из уравнения (5) следует, что, исходя из характеристик сканирования, еще определяют параметры SPj формы. Заметим, что индексация параметров TRj области-мишени, отличающаяся от характеристик Ai и Fi сканирования, указывает на то, что количество параметров TRj может отличаться от количества характеристик Ai и Fi сканирования. В типовых вариантах извлекают достаточно большое количество характеристик Ai и Fi сканирования, достаточное для определения всех необходимых параметров TRj области-мишени.
В некоторых вариантах высоконадежное определение параметров TRj области-мишени может включать в себя дополнение характеристик Ai и Fi некоторыми данными сканирования, такими как непосредственные данные 241-D1, … 241-Dn глубины.
В некоторых вариантах реализации способа 100 используют два контура 241 и 242 сканирования. Такой способ будет продемонстрирован на примере хрусталика 50. Если аппроксимировать переднюю поверхность хрусталика сферической поверхностью, имеющей только один параметр формы SH1=R и сформулировать способ для двух позиционных параметров PP1=Cx и PP2=Cy в плоскости XY, то тогда два вышеуказанных подхода можно представить следующими уравнениями:

и
Эти уравнения также демонстрируют, что извлечение и использование большего количества характеристик сканирования, чем это минимально необходимо для определения параметров TRj области-мишени (в настоящем примере 4 вместо минимально необходимых 3), может стать способом повышения достоверности конечных позиционных параметров PPj.
На фиг.5В показано, что определение на этапе 140 параметров TRj области-мишени может включать в себя определение обновления позиционного параметра, относящегося к положению области-мишени и точки отсчета. В показанном примере точкой отсчета является общий центр контура 241 сканирования и прицельного шаблона 40, позицией, связанной с областью-мишенью, является центр 50-С области-мишени, а обновлением позиционного параметра является вектор сдвига или смещения (Сх, Cy), на который должен быть сдвинут центр прицельного шаблона 40 для перекрытия с центром области-мишени 50-С.
Как упоминалось выше, вектор сдвига может быть представлен в широком разнообразии форм, включая радиальные координаты, указывающие угол смещения (сдвига) и длину сдвига.
Этап 140 может включать сдвиг центра прицельного шаблона 40-С с только что определенным вектором сдвига (Сх, Cy) так, что центр прицельного шаблона перекрывает центр прицельного шаблона 50-С.
Этап 150 регулировки хирургических позиционных параметров может включать в себя регулировку позиционного параметра центра хирургического шаблона для выравнивания центра хирургического шаблона по центру области-мишени.
В некоторых вариантах хирургический шаблон можно центрировать по центру прицельного шаблона 40. В этих вариантах этап 150 может выполняться путем сдвига общего центра хирургического шаблона и прицельного шаблона из его начального положения на вектор сдвига, или величину обновления позиционного параметра, определенного на этапе 140.
В ряде других вариантов сначала можно сдвинуть прицельный шаблон, после чего сдвинуть хирургический шаблон.
Как обсуждалось выше, этот сдвиг может быть одним интегрированным сдвигом, либо может представлять собой двухступенчатый сдвиг, где первый этап может выполняться либо путем практического применения способа 100 ведения хирургической операции либо посредством сдвига, выполняемого вручную или в частично автоматизированном режиме, к центру прицельного шаблона 40 и хирургического шаблона к легко идентифицируемой структуре глаза, такой как зрачок 10. За этим сдвигом может следовать второй сдвиг, перемещающий центр прицельного и хирургического шаблонов к центру истинной области-мишени, например хрусталика 50.
В отличие от существующих способов варианты реализации способа 100 ведения хирургической операции могут обеспечить упомянутое высокоточное определение позиционного обновления, или вектора сдвига, причем, как правило, способ 100 ведения хирургической операции может выполняться только один раз, и тогда результирующее позиционное обновление, или вектор сдвига, выравнивает хирургический шаблон с хирургической областью-мишенью с высокой точностью. Таким образом, в некоторых вариантах реализации способа 100 этапы способа могут выполняться только один раз с получением удовлетворительного результата.
Это контрастирует с ограниченной точностью существующих способов, где этапы способа должны выполняться многократно итеративным образом, чтобы центр прицельного шаблона становился все ближе и ближе к области-мишени.
Высокая точность настоящего способа 100 ведения хирургической операции дает особое преимущество во всех приложениях, где главным фактором является время, например, при хирургических операциях на глазе. Тот факт, что способ 100 может за один раз обеспечить высокоточные результаты, означает, что в некоторых вариантах реализации интервал времени от начала первого этапа сканирования до окончания этапа определения хирургических позиционных параметров может составлять не более 100 миллисекунд, 1000 миллисекунд и 10000 миллисекунд. Каждая из этих временных характеристик может иметь решающее преимущество в приложениях, где критическим фактором является время.
На фиг.6А показано, что, хотя способ 100 ведения хирургической операции был описан применительно к хирургическим операциям на глазах, вышеописанные концепции можно использовать в большом количестве различных процессов формирования изображений, не обязательно связанных с офтальмологическими приложениями. В общем случае способ 300 можно использовать для формирования изображений во время проведения инвазивных и неинвазивных медицинских процедур. Его можно также использовать различным образом для формирования изображения при обработке материалов или при неразрушающем анализе усталости материалов, используемом в различных отраслях, например от авиационной до ядерной.
В любом из этих приложений способ 300 формирования изображений может включать в себя следующие этапы.
На этапе 310 выполняется позиционирование объекта относительно системы формирования изображений, где форма объекта может описываться на основе одного или нескольких параметров формы, а ориентация объекта может описываться на основе одного или нескольких параметров ориентации.
На этапе 320 создают данные сканирования путем определения координаты объекта на наборе точек вдоль дуги.
На этапе 330 определяют форму объекта и параметры ориентации и позиционные параметры объекта на основе данных сканирования.
Объект может представлять собой часть сферического поверхностного слоя, показанного в качестве примера на фиг.4В, причем определяемым параметром SP1 формы объекта может быть радиус R сферического поверхностного слоя, а позиционными параметрами объекта могут быть координаты XY центра сферы, как это представлено, например, в уравнениях (1)-(5).
Либо объектом может быть эллипсоид, параметрами SPj формы могут быть значения длины по трем осям эллипсоида, параметрами OPj ориентации могут быть углы единичных векторов, представляющих направление главных осей, а позиционными параметрами PPj могут быть координаты центра эллипсоида.
Хотя способ 300 был описан со ссылками на фигуры, иллюстрирующие его применение в офтальмологии, можно представить очень большое разнообразие применений формирования изображений с его помощью. С помощью способа 300 формирования изображений может быть отображен любой объект, способный тем или иным образом отражать свет или изменять его распространение. С помощью способа 300 можно сформировать изображение объекта, который можно охарактеризовать в терминах параметров формы. В некоторых приложениях, разработанных для исследования качества материалов, могут быть сформированы изображения неровностей на поверхностях материала. В ряде этих приложений параметром формы может быть топологический размер элемента на неровной поверхности или типовая неравномерность частиц или доменов размера материала. В технических приложениях, где исследуется износ и усталость деталей машин, форма детали может быть известна из проектной документации, а способ 300 формирования изображений поможет отобразить степень искажения или изменения этих известных параметров формы, например уменьшение диаметра провода или поперечного сечения балки.
Кроме того, до настоящего времени способ 300 формирования изображений описывался в терминах закрытых объектов, то есть объектов, окруженных замкнутой поверхностью. В других вариантах также могут формироваться изображения «открытых объектов», которые окружены открытыми поверхностями. Класс открытых поверхностей включает в себя поверхности с границами или краями. Примеры открытых объектов включают в себя участки закрытых объектов, например часть сферы или эллипсоида, имеющие круговую или эллиптическую границу, либо край. Другие примеры включают в себя различные поверхности, изображения которых используются при инженерном проектировании, контроле качества, диагностике материалов и в целях определения параметров различных объектов. Конкретный класс приложения способа 300 формирования изображений предназначен для открытых непрозрачных объектов. Способ 300 формирования изображений позволяет получить изображение многих указанных непрозрачных открытых объектов для различных целей.
Во многих из этих приложений на этапе 320 создания данных сканирования можно получить достаточно данных для определения параметров формы, параметров ориентации и позиционных параметров изображаемого объекта с использованием информации о том, что объект может характеризоваться конкретными параметрами формы. В некоторых других приложениях, в которых формируется изображение объектов априори без знания его формы, процессор может предложить различные формы и проанализировать данные сканирования в свете предложенных форм. Используя некоторые критерии подбора, процессор может решить, какая из предложенных форм лучше всего соответствует изображаемому объекту, и перейти к определению параметра формы объекта и позиционного параметра объекта.
В некоторых вариантах объектом может быть передний поверхностный слой хрусталика глаза, параметром формы объекта может быть радиус переднего поверхностного слоя хрусталика, а позиционными параметрами объекта могут быть координаты центра передней поверхности хрусталика.
Как было описано выше, определение позиционных параметров объекта на этапе 330 может включать в себя формирование изображения объекта по меньшей мере одним из следующих способов: оптическая когерентная томография (OCT), ультразвуковой способ, микроскопический способ, интерференционный способ.
Определение параметра формы объекта и позиционных параметров объекта на этапе 330 может включать в себя создание вспомогательных данных сканирования путем определения координаты объекта на вспомогательном наборе точек вдоль вспомогательной дуги. В некоторых вариантах этот этап может быть практически реализован, если недостаточно данных сканирования вдоль исходной дуги на этапе 320, чтобы определить параметры формы объекта и позиционные параметры. Дуга на этапе 320 и вспомогательная дуга на этапе 330 могут быть аналогичны дугам 241 и 242 на фиг.4А-С.
В некоторых вариантах координатой объекта является координата Z слоя объекта, а дуга является частью линии пересечения, где цилиндр сканирования пересекает слой объекта.
Этап 330 определения параметра формы объекта может включать в себя определение координаты Z слоя объекта на вспомогательном наборе точек вдоль линии пересечения, где вспомогательный цилиндр пересекает слой объекта. По аналогии с фиг.4С цилиндр сканирования и вспомогательный цилиндр по существу могут быть концентрическими с общей осью Z.
Этап 330 определения параметра формы объекта и позиционных параметров объекта может включать в себя извлечение амплитуды и фазы из данных сканирования и определение центра слоя объекта на основе извлеченной амплитуды и фазы.
В различных вариантах реализации позиционным параметром объекта может быть параметр центра слоя объекта или периметр слоя объекта.
Как было описано выше, благодаря высокой эффективности способа 300 в некоторых вариантах реализации возможно окажется достаточным выполнение одного этапа 320 создания данных сканирования, то есть после первого сканирования не понадобится дополнительное сканирование, а возможно и первое вспомогательное сканирование. Это отличает данный способ от существующих систем, где параметр формы и позиционные параметры могут определяться итеративным образом путем многократного повторения этапа 320 сканирования.
Также, как упоминалось выше, позиционный параметр объекта и параметр формы объекта могут быть найдены интегральным образом.
На фиг.6В показан один аспект вышеизложенных способов 100 и 300 формирования изображений. Поскольку эти способы весьма эффективны, они могут вовремя обеспечить доставку позиционных данных области-мишени. Это позволяет выполнять способы 100 или 300 многократно, например, в ходе хирургической процедуры, чтобы предоставлять позиционную информацию практически в режиме реального времени или с небольшой временной задержкой. Затем, если по какой-либо причине имело место изменения области-мишени, например из-за перемещения глаза пациента, система формирования изображений в состоянии определить обновления, касающиеся позиционного параметра мишени, в режиме, близком к режиму реального времени, так что хирургический шаблон можно сдвигать соответствующим образом, а хирургический лазер можно применить согласно передвинутому хирургическому шаблону. Эта возможность функционирования в режиме, близком к режиму реального времени, дополнительно повышает точность офтальмологической хирургической процедуры.
Указанный способ 400 формирования изображений и наведения в режиме, близком к режиму реального времени, во время хирургической операции на глазе может включать следующие этапы:
(а) позиционирование глаза относительно хирургической лазерной системы, где хирургическая лазерная система имеет хирургический позиционный параметр, а глаз имеет хрусталик - этап 410;
(b) определение позиционных данных области-мишени хрусталика вдоль дуги сканирования - этап 420;
(с) определение позиционного параметра хрусталика на основе позиционных данных - этап 430;
(d) регулировка хирургического позиционного параметра в соответствии с определенным позиционным параметром хрусталика - этап 440; и
(е) повторение этапов (b)-(d) во время хирургической операции на глазе для перенастройки хирургического позиционного параметра - этап 450.
Способ 400 можно использовать, например, для хирургических операций, где областью-мишенью хрусталика является одно из: передняя поверхность хрусталика, передняя поверхность, ограниченная зрачком, область-мишень хрусталика и задняя поверхность хрусталика.
По аналогии с фиг.4А-Е этап 430 определения позиционных параметров хрусталика может включать в себя извлечение амплитуды и фазы из позиционных данных, а затем определение позиционного параметра центра области-мишени хрусталика по амплитуде и фазе позиционных данных.
В некоторых вариантах реализации этап 440 регулировки хирургических позиционных параметров может включать в себя регулировку параметра центра хирургического шаблона для выравнивания хирургического шаблона по трем измерениям по отношению к отличительному признаку хрусталика.
На фиг.7-17 показаны варианты лазерной хирургической системы.
Одним важным аспектом лазерных хирургических процедур является точное управление и нацеливание лазерного луча, например его позиционирование и фокусировка. Лазерные хирургические системы могут быть спроектированы со средствами лазерного управления и нацеливания для точного нацеливания лазерных импульсов на конкретную мишень в ткани. В различных фотодизруптивных лазерных хирургических системах, работающих в наносекундном диапазоне, таких как лазерные системы Nd:YAG, требуемый уровень точности нацеливания относительно низок. Частично это происходит потому, что энергия лазера относительно высока, и поэтому обрабатываемая площадь ткани также оказывается относительно большой, часто покрывающей область воздействия в сотни микрон. В указанных системах интервал времени между лазерными импульсами имеет тенденцию к увеличению, и здесь возможно нацеливание с ручным управлением, что обычно и используется. Одним из примеров таких механизмов ручного нацеливания является биомикроскоп, используемый для визуализации нацеливаемой ткани в сочетании со вторым лазерным источником, используемым в качестве нацеливающего луча. Хирург вручную обычно с помощью джойстика перемещает фокус лазерной фокусирующей линзы, которая является парфокальной (с или без смещения), с помощью изображения через микроскоп, так что хирургический луч или нацеливающий луч точно фокусируется на намеченной мишени.
Указанные способы, разработанные для использования с лазерными хирургическими системами с низкой частотой повторения импульсов, трудно использовать для лазеров с высокой частотой повторения импульсов, работающих на частотах в тысячи импульсов в секунду и относительно низкой энергией на один импульс. При хирургических операциях с использованием лазеров с высокой частотой повторения импульсов может потребоваться гораздо более высокая точность из-за слабых воздействий каждого единичного лазерного импульса, а также может потребоваться гораздо более высокая скорость позиционирования из-за необходимости очень быстрой подачи тысяч импульсов на новые обрабатываемые зоны.
Примеры импульсных лазеров с высокой частотой повторения для лазерных хирургических систем включают в себя импульсные лазеры с частотой повторения импульсов, составляющей тысячи импульсов в секунду или выше, при относительно низкой энергии на один импульс. В указанных лазерах относительно низкая энергия на один импульс используется для того, чтобы локализовать воздействие на ткань, оказываемое в результате фотодизрупции, вызываемой лазером, например область ткани, подвергаемую фотодизрупции, порядка нескольких микрон или десятков микрон. Такое локализованное воздействие на ткань может повысить точность лазерной хирургии и может быть необходимым в некоторых хирургических процедурах, таких как лазерная хирургия глаза. В одном примере указанной хирургии для достижения конкретных хирургических результатов, таких как надрезы ткани, разделение или фрагментация, может быть использована подача многих сотен, тысяч или миллионов непрерывных, близких к непрерывным или импульсных сигналов, разделенных известными интервалами.
Для различных хирургических процедур, в которых используют фотодизруптивные лазерные хирургические системы с высокой частотой повторения и более короткими лазерными импульсами, может потребоваться высокая точность позиционирования каждого импульса в ткани-мишени, подвергаемой хирургическому воздействию, как по абсолютному положению относительно местоположения мишени на ткани, так и по относительному положению относительно предшествующих импульсов. Например, в некоторых случаях может потребоваться подача лазерных импульсов друг за другом с точностью несколько микрон в пределах временного интервала между импульсами, который может составлять порядка нескольких микросекунд. Поскольку временной интервал между двумя последовательными импульсами мал, а требование к точности выравнивания импульсов велико, ручное нацеливание, используемое в импульсных лазерных системах с низкой частотой повторения, может оказаться неадекватным или невозможным.
Одним из приемов, обеспечивающих высокоскоростное позиционирование для подачи лазерных импульсов в ткань, является прикрепление уплощающей пластины, выполненной из прозрачного материала, такого как стекло, с предварительно определенной контактной поверхностью к ткани, с тем чтобы контактная поверхность этой уплощающей пластины образовала четко определенное оптическое сопряжение с тканью. Это четко определенное сопряжение может облегчить передачу и фокусировку лазерного излучения в ткань для управления или уменьшения оптических аберраций или изменений (например, из-за специфических оптических свойств глаза или изменений, появляющихся в связи с высыханием поверхности), что является наиболее критическим на границе воздух-ткань, которая находится на передней поверхности роговой оболочки. Для различных приложений и мишеней внутри глаза и других тканей могут быть разработаны контактные линзы, в том числе одноразовые или многократно используемые. Контактную стеклянную уплощенную пластину на поверхности ткани-мишени можно использовать в качестве эталонной пластины, относительно которой фокусируют лазерные импульсы посредством регулировки фокусирующих элементов в системе подачи лазерного луча. Такое использование контактной стеклянной или уплощающей пластины обеспечивает более эффективное управление оптическими характеристиками поверхности ткани и позволяет точно и с высокой скоростью подавать лазерные импульсы в требуемое место (точка воздействия) в ткани-мишени относительно уплощающей эталонной поверхности при минимальном оптическом искажении лазерных импульсов.
Одним из путей реализации уплощающей пластины является использование этой уплощающей пластины для обеспечения позиционной системы отсчета для подачи лазерных импульсов в ткань-мишень в глазе. Такое использование уплощающей пластины в качестве позиционной системы отсчета может быть основано на известном требуемом местоположении лазерного фокуса в мишени с достаточной точностью до возбуждения лазерных импульсов, и также основано на том, что относительные положения эталонной пластины и отдельной внутренней мишени ткани должны оставаться постоянным во время возбуждения лазера. Вдобавок для реализации этого способа может потребоваться фокусировка лазерного импульса на требуемое место для обеспечения предсказуемости и повторяемости результатов между одним и другим глазом или в разных областях внутри одного и того же глаза. В реальных системах возможны трудности использования уплощающей пластины в качестве позиционной системы отсчета для точной интраокулярной локализации лазерных импульсов, поскольку в реальных системах вышеописанные условия могут не соблюдаться.
Например, если хирургической мишенью является хрусталик глаза, то точное расстояние от эталонной пластины на поверхности глаза до мишени имеет тенденцию к изменению из-за наличия гибких структур, таких как сама роговая оболочка, передняя камера глаза и радужная оболочка. Расстояние между уплощающей роговой оболочкой и хрусталиком может быть не только различным для разных глаз, но также может изменяться в одном и том же глазе в зависимости от конкретных хирургических приемов, используемых хирургом. Вдобавок возможно перемещение ткани нацеливаемого участка ткани хрусталика относительно уплощающей поверхности во время излучения тысяч лазерных импульсов, необходимых для достижения хирургического эффекта, что дополнительно затрудняет точную подачу импульсов. Кроме того, структуры внутри глаза могут перемещаться из-за накопления фотодизруптивных побочных продуктов, таких как кавитационные пузырьки. Например, лазерные импульсы, подаваемые в хрусталик глаза, могут вызвать выпячивание вперед капсулы хрусталика, что потребует регулировки для нацеливания на эту ткань для последующей подачи лазерных импульсов. Кроме того, возможны трудности при использовании компьютерных моделей и имитационных моделей для предсказания с достаточной точностью действительного местоположения тканей-мишеней после удаления уплощающей пластины, а также при регулировке подачи лазерных импульсов для обеспечения требуемой локализации без уплощения, частично из-за сильно изменчивой природы эффектов уплощения, которые могут зависеть от конкретных особенностей отдельной роговой оболочки или глаза, а также от конкретного способа выполнения хирургической операции и уплощения, используемого хирургом.
Вдобавок к физическим эффектам уплощения, которые не пропорционально влияют на локализацию внутренних структур тканей, в некоторых хирургических операциях может потребоваться, чтобы система нацеливания предвосхищала или учитывала нелинейные характеристики фотодизрупции, которые могут появиться при использовании лазеров с малой длительностью импульсов. Фотодизрупция является нелинейным оптическим процессом в материале ткани, причем она может создать проблемы с выравниванием луча или его нацеливанием. Например, один из нелинейных оптических эффектов в материале ткани при ее взаимодействии с лазерными импульсами во время фотодизрупции состоит в том, что коэффициент преломления материала ткани под воздействием лазерных импульсов становится не постоянным, а изменяется в зависимости от интенсивности излучения. Поскольку интенсивность излучения лазерных импульсов пространственно изменяется в пульсирующем лазерном луче вдоль или поперек направления распространения импульсного лазерного луча, коэффициент преломления материала ткани также изменяется в пространстве. Одним из последствий этого нелинейного коэффициента преломления является самофокусировка или саморасфокусировка в материале ткани, который изменяет действительный фокус и сдвигает положение фокуса импульсного лазерного луча внутри ткани. Таким образом, может также потребоваться точное выравнивание импульсного лазерного луча для каждой позиции в ткани-мишени, чтобы учесть нелинейные оптические воздействия материала ткани на лазерный луч. Вдобавок может понадобиться регулировка энергии каждого импульса для получения одного и того же физического эффекта в разных областях мишени из-за разных физических характеристик, таких как твердость, или из-за таких оптических явлений, как поглощение или рассеяние лазерного импульсного излучения, поступающего в конкретную область. В указанных случаях различия нелинейных эффектов фокусировки между импульсами с разными значениями энергии также может повлиять на выравнивание и нацеливание хирургических лазерных импульсов.
Таким образом, в тех хирургических процедурах, где мишенями являются неповерхностные структуры, использование поверхностной уплощающей пластины на основе позиционной системы отсчета, обеспечиваемой этой уплощающей пластиной, может оказаться недостаточным для достижения точной локализации лазерных импульсов во внутренних мишенях-тканях. Использование уплощающей пластины в качестве системы отсчета для наведения лазера может потребовать высокоточных измерений толщины и положения уплощающей пластины, поскольку отклонение от номинала непосредственно влечет за собой погрешность в определении глубины. Высокоточные уплощенные линзы могут быть весьма дорогими, особенно в случае единичного использования одноразовых уплощенных пластин.
Описанные в этом документе способы, устройство и системы могут быть реализованы таким образом, чтобы обеспечить механизм нацеливания для подачи коротких лазерных импульсов через уплощенную пластину в требуемое место внутри глаза с высокой точностью и скоростью без необходимости знать требуемое местоположение фокуса лазерных импульсов в мишени с достаточной точностью до возбуждения лазерных импульсов и без необходимости, чтобы относительные положения опорной пластины и отдельной внутренней мишени оставались постоянными во время излучения лазера. По существу настоящие способы, устройство и системы можно использовать для различных хирургических процедур, где физические условия в ткани-мишени, подвергающейся хирургической операции, имеют тенденцию к изменению, и ими трудно управлять, и где размер уплощенной линзы обычно изменяется при переходе от одного хрусталика к другому. Настоящие способы, устройство и системы также можно использовать для других хирургических мишеней, где имеет место искажение или перемещение хирургической мишени относительно поверхности указанной структуры, или где нелинейные оптические эффекты делают точное нацеливание весьма проблематичным. Примеры таких хирургических мишеней, отличных от глаза, включают в себя сердце, более глубокую ткань в коже и др.
Настоящие способы, устройство и системы можно реализовать так, чтобы получить преимущество, обеспечиваемое применением уплощающей пластины, в том числе, например, управление формой поверхности и гидратации, а также уменьшением оптического искажения, при обеспечении точной локализации фотодизрупции во внутренних структурах уплощенной поверхности. Это может быть выполнено посредством использования интегрированного устройства формирования изображений для локализации ткани-мишени относительно фокусирующей оптики системы подачи лазерного луча. Точный тип устройства и способа формирования изображений может изменяться и зависеть от конкретной природы мишени и требуемого уровня точности.
Уплощенная линза может быть реализована вместе с другим механизмом для фиксации глаза с целью предотвращения его поступательного и вращательного перемещения. Примеры указанных фиксирующих устройств включают в себя использование вакуумного кольца. Такой фиксирующий механизм может также привести к нежелательному искажению или перемещению хирургической мишени. Настоящие способы, устройство и системы могут быть реализованы для обеспечения лазерных хирургических систем с высокой частотой повторения, где используется уплощающая пластина и/или фиксирующее средство для неповерхностных хирургических мишеней, механизмом нацеливания для интраоперативного формирования изображений с целью непрерывного контроля искажений и перемещения хирургической мишени.
Ниже описаны конкретные примеры способов, устройства и систем лазерной хирургии, где используется оптический модуль формирования изображений для фиксации изображений ткани-мишени с целью получения информации для позиционирования ткани-мишени, например, перед и во время выполнения хирургической процедуры. Полученную таким образом информацию о позиционировании можно использовать для управления позиционированием и фокусировкой хирургического лазерного луча ткани-мишени, чтобы обеспечить точное управление подачей хирургических лазерных импульсов в лазерных системах с высокой частотой повторения. В одном варианте реализации во время хирургической процедуры изображения, полученные оптическим модулем формирования изображения, можно использовать для динамического управления положением и фокусом хирургического лазерного луча. Вдобавок лазерные импульсы низкой энергии чувствительны к оптическим искажениям, так что в лазерной хирургической системе может быть реализована уплощающая пластина с плоской или искривленной границей, состыкованной с тканью-мишенью, для обеспечения управляемого и устойчивого оптического интерфейса между тканью-мишенью и хирургической лазерной системой и для подавления и контроля оптических аберраций на поверхности ткани.
В качестве примера на фиг.7 показана лазерная хирургическая система на основе оптического формирования изображений и уплощения. Эта система включает в себя импульсный лазер 1010 для создания хирургического лазерного импульсного луча 1012 и оптический модуль 1020 для приема хирургического лазерного луча 1012 и фокусировки и направления сфокусированного хирургического лазерного луча 1022 на ткань-мишень 1001, такую как глаз, чтобы вызвать фотодизрупцию в ткани-мишени 1001. Может быть обеспечена уплощающая пластина, контактирующая с тканью-мишенью 1001, для создания интерфейса для передачи лазерных импульсов в ткань-мишень 1001 и света, приходящего от ткани-мишени 1001 через упомянутый интерфейс. Заметим, что для фиксации света, несущего изображения 1050 ткани-мишени, или информацию для формирования изображений из ткани-мишени 1001 для создания изображения ткани-мишени 1001 предусмотрено оптическое устройство 1030 формирования изображений. Сигнал 1032, формирующий изображение, посылается из устройства 1030 формирования изображений в системный модуль 1040 управления. Системный модуль 1040 управления обрабатывает зафиксированные изображения, поступающие от устройства 1030 формирования изображений, и управляет оптически модулем 1020, регулируя положение и фокус хирургического лазерного луча 1022 на ткани-мишени 1001 на основе информации из зафиксированных изображений. Оптический модуль 1020 может включать в себя одну или несколько линз и кроме того содержать один или несколько отражателей. В оптический модуль 1020 может быть включен управляющий исполнительный механизм для регулировки фокусировки и направления луча в соответствии с сигналом 1044 управления лучом, поступающим из системного модуля 1040 управления. Модуль 1040 управления может также управлять импульсным лазером 1010 посредством сигнала 1042 управления лазером.
Оптическое устройство 1030 формирования изображений может быть реализовано для создания оптического луча, формирующего изображения, который отделен от хирургического лазерного луча 1022, для зондирования ткани-мишени 1001, а обратный свет оптического луча, формирующего изображение, фиксируется оптическим устройством 1030 формирования изображений для получения изображений ткани-мишени 1001. Одним из примеров такого оптического устройства 1030 формирования изображений является модуль формирования изображений на основе оптической когерентной томографии (OCT), в котором используются два луча, формирующих изображения: один зондирующий луч, направленный на ткань-мишень 1001 через уплощенную пластину, и другой эталонный луч, идущий по эталонной оптической траектории, которые оптически интерферируют друг с другом, обеспечивая получение изображений ткани-мишени 1001. В других вариантах реализации в оптическом устройстве 1030 формирования изображений может использоваться рассеянный или отраженный от ткани-мишени 1001 свет для фиксации изображений без посылки специального оптического луча, формирующего изображения, на ткань-мишень 1001. К примеру, устройство 1030 формирования изображений может представлять собой матрицу чувствительных элементов, таких как приборы с зарядовой связью (CCD) или сопряженные многоэлектродные датчики (CMS). Например, изображения побочного продукта фотодизрупции, созданного хирургическим лазерным лучом 1022, могут быть зафиксированы оптическим устройством 1030 формирования изображений для управления фокусировкой и позиционирования хирургического лазерного луча 1022. Когда оптическое устройство 1030 формирования изображений предназначено для управления выравниванием хирургического лазерного луча с использованием изображения побочного продукта фотодизрупции, оптическое устройство 1030 формирования изображений фиксирует изображения побочного продукта фотодизрупции, такого как пузырьки или каверны, созданные лазером. Устройство 1030 формирования изображений также может представлять собой ультразвуковое устройство формирования изображений, фиксирующее изображения на основе акустических образов.
Системный модуль 1040 управления обрабатывает данные изображения, поступающие из устройства 1030 формирования изображений, которые включают в себя информацию о смещении положения для побочного продукта фотодизрупции от положения ткани-мишени 1001. На основе информации, полученной из изображения, создается сигнал 1044 управления лучом для управления оптическим модулем 1020, который регулирует лазерный луч 1022. В системный модуль 1040 управления может быть включен блок цифровой обработки для выполнения различной обработки данных, необходимой для юстировки лазера.
Вышеописанные способы и системы могут быть использованы для подачи лазерных импульсов с высокой частотой повторения на подповерхностные мишени с точностью, необходимой для сопряженных импульсов, если это необходимо для приложений, связанных с отрезанием или приложений, связанных с объемной дизрупцией. Это может быть выполнено с использованием или без использования эталонного источника на поверхности мишени, причем возможен учет перемещения мишени после уплощения или во время подачи лазерных импульсов.
В настоящих системах предусмотрена уплощенная пластина для облегчения управления высокоскоростным и высокоточным позиционированием при подаче лазерных импульсов на ткань. Такая уплощенная пластина может быть выполнена из прозрачного материала, такого как стекло, с предварительно определенной контактной поверхностью, контактирующей с тканью, так что контактная поверхность уплощающей пластины образует с тканью четко определенный оптический интерфейс. Этот четко определенный интерфейс может облегчить передачу и фокусировку лазерного излучения на ткань для контроля или уменьшения оптических аберраций или изменений (например, из-за специфических оптических свойств глаза или изменений, появляющихся с высыханием поверхности), которые являются наиболее критичными для границы раздела воздух-ткань на передней поверхности роговой оболочки. Разработан ряд контактных линз для различных применений и мишеней внутри глаза и других тканей, в том числе одноразовые или многократно используемые. Контактное стекло или уплощенная пластина на поверхности ткани-мишени используется в качестве эталонной пластины, относительно которой фокусируются лазерные импульсы посредством регулировки фокусирующих элементов в системе подачи лазерных импульсов. Указанному подходу присущи дополнительные преимущества, обусловленные использованием вышеописанных контактного стекла или уплощающей пластины, включая управление оптическими характеристиками поверхности-мишени. Соответственно лазерные импульсы могут подаваться с высокой скоростью и точностью в требуемое место (точка взаимодействия) в ткани-мишени относительно уплощающей эталонной пластины с небольшим оптическим искажением лазерных импульсов.
Оптическое устройство 1030 формирования изображений на фиг.7 фиксирует (захватывает) изображения ткани-мишени 1001 через уплощенную пластину. Модуль 1040 управления обрабатывает захваченные изображения, извлекая из них позиционную информацию, и использует извлеченную позиционную информацию в качестве системы отсчета положения или средства наведения для управления положением и фокусом хирургического лазерного луча 1022. Лазерные хирургические операции на основе наведения по сформированным изображениям могут быть реализованы без уплощающей пластины в качестве системы отсчета положения, поскольку положение уплощающей пластины имеет тенденцию к изменению из-за действия различных факторов, обсужденных выше. Таким образом, хотя уплощенная пластина обеспечивает требуемый оптический интерфейс для хирургического лазерного луча, входящего в ткань-мишень и фиксирующего изображения ткани-мишени, могут возникнуть трудности при использовании этой уплощающей пластины в качестве системы отсчета положения для выравнивания и управления положением и фокусом хирургического лазерного луча для точной подачи лазерных импульсов. Управление положением и фокусом хирургического лазерного луча на основе наведения по изображениям, сформированным устройством 1030 формирования изображений, и модулем 1040 управления позволяет в качестве систем отсчета положения использовать изображения ткани-мишени 1001, например, изображения внутренних структур глаза без использования уплощающей пластины в качестве системы отсчета положений.
Вдобавок к физическим эффектам уплощения, которые не пропорционально влияют на локализацию внутренних структур-мишеней, в некоторых хирургических операциях может потребоваться, чтобы система нацеливания учитывала нелинейные характеристики фотодизрупции, которые могут проявиться при использовании лазеров с короткими импульсами. Фотодизрупция может создать проблемы при выравнивании нацеливании луча. Например, один из нелинейных оптических эффектов в материале ткани при ее взаимодействии с лазерными импульсами во время фотодизрупции состоит в том, что коэффициент преломления материала ткани под воздействием лазерных импульсов оказывается не постоянным, а изменяется в зависимости от интенсивности излучения. Поскольку интенсивность излучения лазерных импульсов пространственно изменяется в пульсирующем лазерном луче вдоль или поперек направления распространения импульсного лазерного луча, коэффициент преломления материала ткани также изменяется в пространстве. Одним из последствий этого нелинейного коэффициента преломления является самофокусировка или саморасфокусировка в материале ткани, который изменяет действительный фокус и сдвигает положение фокуса импульсного лазерного луча внутри ткани. Таким образом, может также потребоваться точное выравнивание импульсного лазерного луча для каждой позиции в ткани-мишени, чтобы учесть нелинейные оптические воздействия материала ткани на лазерный луч. Вдобавок может понадобиться регулировка энергии каждого импульса для получения одного и того же физического эффекта в разных областях мишени из-за разных физических характеристик, таких как твердость, или из-за таких оптических явлений, как поглощение или рассеяние лазерного импульсного излучения, поступающего в конкретную область. В указанных случаях различия нелинейных эффектов фокусировки между импульсами с разными значениями энергии также могут повлиять на выравнивание и нацеливание хирургических лазерных импульсов. В этом отношении прямые изображения, полученные от ткани-мишени устройством 1030 формирования изображений, можно использовать для текущего контроля за действительным положением хирургического лазерного луча 1022, которое отражает комбинированные воздействия нелинейных оптических эффектов в ткани-мишени, и могут быть использованы для обеспечения систем отсчета положения для управления положением и фокусом луча.
Описанные здесь способы, устройство и системы могут быть использованы в сочетании с уплощающей пластиной для обеспечения управления формой поверхности и гидратацией для уменьшения оптического искажения, при обеспечении точной локализации фотодизрупции во внутренних структурах через уплощенную поверхность. Вышеописанное управление положением и фокусом луча на основе наведения по сформированным изображениям может быть использовано для хирургических систем и процедур, где применяются средства, отличные от уплощенных пластин для фиксации глаза, в том числе использование вакуумного кольца, что может привести к искажению или перемещению хирургической мишени.
В последующих разделах сначала описываются примеры способов устройства и систем для автоматизированной лазерной хирургии на основе наведения по сформированным изображениям путем изменения степени интеграции функций формирования изображений в управляющей части лазерных систем. Для направления зондирующего луча или луча иного типа для захвата изображений ткани-мишени, например структур внутри глаза, можно использовать оптический или иного характера модуль формирования изображений, такой как модуль формирования изображений на основе OCT. Наведение хирургического лазерного импульсного луча, такого как луч с фемтосекундными или пикосекундными импульсами, может выполняться на основе позиционной информации в зафиксированных изображениях для управления фокусировкой и позиционированием хирургического лазерного луча во время хирургической операции. Хирургический лазерный луч и зондирующий световой луч могут направляться последовательно или одновременно на ткань-мишень во время хирургической операции, так что управление хирургическим лазерным лучом может быть основано на захваченных изображениях, чтобы обеспечить точное и правильное выполнение хирургической операции.
Указанные лазерные хирургические операции на основе наведения по сформированным изображениям можно использовать для обеспечения правильной и точной фокусировки и позиционирования хирургического лазерного луча во время ведения хирургической операции, поскольку управление лучом основано на изображениях ткани-мишени после уплощения или захвата ткани-мишени либо непосредственно перед подачей хирургических импульсов, либо почти одновременно с ними. Заметим, что некоторые параметры ткани-мишени, например глаза, измеренные перед хирургической операцией, могут в ходе ее изменяться из-за различных факторов, например, подготовки ткани-мишени (например, фиксация глаза относительно уплощенной линзы) и изменение ткани-мишени под воздействием хирургических операций. Таким образом, параметры ткани-мишени, измеренные до воздействия указанных факторов и/или до хирургического воздействия, возможно уже не будут отражать физические условия в ткани-мишени во время хирургической операции. Настоящие лазерные хирургические операции на основе наведения по сформированным изображениям могут снять технические проблемы, связанные с указными изменениями во время фокусировки и позиционирования хирургического лазерного луча перед или во время проведения хирургической операции.
Лазерная хирургия на основе наведения по сформированным изображениям может эффективно использоваться для выполнения точных хирургических операций в ткани-мишени. Например, при выполнении лазерной хирургической операции внутри глаза лазерный луч фокусируется внутри глаза для достижения оптического разрушения ткани-мишени, причем указанные оптически взаимодействия могут изменить внутреннюю структуру глаза. Например, можно изменить положение, форму, толщину и диаметр хрусталика глаза во время аккомодации не только между предыдущими измерениями и хирургическими воздействиями, но также во время хирургической операции. Крепление глаза к хирургическому инструменту механическим путем может изменить форму глаза непредсказуемым образом, и кроме того такое изменение может происходить во время хирургической операции из-за различных факторов, например, перемещения пациента. Средства фиксации включают в себя фиксацию глаза с помощью вакуумного кольца и уплощение глаза с помощью плоской или кривой линзы. Величина эти изменений может доходить до нескольких миллиметров. Механическая привязка и фиксации поверхности глаза, например, передней поверхности роговой оболочки или лимба роговицы не дает хороших результатов при выполнении высокоточных лазерных микрохирургических операций внутри глаза.
Для установления трехмерной позиционной базы отсчета между внутренними деталями глаза и хирургическим инструментом в условиях появления изменений до или во время хирургической операции можно использовать постподготовку или практически одновременное формирование изображений в описываемой лазерной хирургии на основе наведения по сформированным изображениям. Эталонная позиционная информация, обеспечиваемая формированием изображений перед уплощением и/или фиксацией глаза либо во время самой хирургической операции отражает влияние изменений в глазе и, следовательно, обеспечивает точное наведение, необходимое для фокусировки и позиционирования хирургического лазерного луча. Система, базирующаяся на предложенной лазерной хирургии на основе наведения по сформированным изображениям, может иметь простую структуру и быть экономически эффективной. Например, часть оптических компонент, связанных с наведением хирургического лазерного луча, может совместно использоваться оптическими компонентами для наведения зондирующего луча света для формирования изображений ткани-мишени для упрощения структуры устройства и оптического выравнивания и калибровки изображений и хирургических световых лучей.
В описываемых ниже лазерных хирургических системах с наведением по сформированным изображениям используется формирование изображений на основе OCT, но для захвата изображений с целью управления хирургическими лазерами во время операции также могут быть использованы и другие устройства формирования изображений без применения OCT. Как показано в приведенных ниже примерах, степень интеграции подсистемы формирования изображений и хирургической подсистемы может быть различной. В простейшем виде без интеграции аппаратных средств подсистемы формирования изображений и лазерной хирургии разделены и могут осуществлять связь друг с другом через соответствующие интерфейсы. Это может обеспечить гибкость технических решений по указанным двум подсистемам. Интеграция этих двух подсистем с помощью ряда аппаратных компонент, таких как интерфейс пациента, дополнительно расширяет функциональные возможности на основе, предлагая улучшенное совмещение хирургической области с аппаратными компонентами, более точную калибровку и может улучшить рабочий процесс. При увеличении степени интеграции между двумя указанными подсистемами такая система может иметь повышенную экономическую эффективность и компактность, причем система калибровки будет дополнительно упрощена и отличаться большей стабильностью во времени. На фиг.8-16 показаны примеры лазерных систем с наведением по сформированным изображениям с различной степенью интеграции.
Один вариант реализации настоящей лазерной хирургической системы с наведением по сформированным изображениям включает в себя, например: хирургический лазер, который создает хирургический лазерный луч из импульсов, которые вызывают изменения ткани-мишени, подвергаемой хирургическому воздействию; держатель интерфейса пациента, который обеспечивает контакт интерфейса пациента с тканью-мишенью для удерживания ткани-мишени в правильном положении; и модуль подачи лазерного луча, расположенный между хирургическим лазером и интерфейсом пациента и сконфигурированный для направления хирургического лазерного луча на ткань-мишень через интерфейс пациента. Модуль подачи лазерного луча предназначен для сканирования хирургическим лазерным лучом ткани-мишени вдоль заранее определенного хирургического шаблона. Эта система также включает в себя модуль управления лазером, который управляет работой хирургического лазера и управляет модулем подачи лазерного луча для создания заранее определенного хирургического шаблона, и модуль OCT, расположенный относительно интерфейса пациента таким образом, что соблюдается известное пространственное соотношение по отношению к интерфейсу пациента и ткани-мишени, зафиксированной к интерфейсу пациента. Модуль OCT сконфигурирован для направления оптического зондирующего луча на ткань-мишень и приема обратного зондирующего света оптического зондирующего луча от ткани-мишени для фиксации изображений ткани-мишени (изображения OCT), когда хирургический лазерный луч направлен на ткань-мишень для выполнения хирургической операции, так что оптический зондирующий луч и хирургический лазерный луч присутствуют в ткани-мишени одновременно. Модуль OCT находится на связи с модулем управления лазером для посылки информации о зафиксированных изображениях OCT в модуль управления лазером.
Вдобавок модуль управления лазером в этой конкретной системе реагирует на информацию о захваченных (зафиксированных) изображениях OCT, приводя в действие модуль подачи лазерного луча при фокусировке и сканировании хирургическим лазерным лучом, и осуществляет регулирование фокусировки и сканирования хирургическим лазерным лучом в ткани-мишени на основе информации о позиционировании в зафиксированных изображениях OCT.
В некоторых вариантах реализации получение полного изображения ткани-мишени может оказаться необязательным для совмещения мишени с хирургическим инструментом, но может оказаться достаточным для получения части ткани-мишени, например, нескольких точек из хирургической области, таких как естественные или искусственные ориентиры. Например, для определения твердого тела, имеющего шесть степеней свободы в трехмерном пространстве, будет достаточно иметь шесть независимых точек. Если точный размер хирургической области неизвестен, то необходимо иметь дополнительные точки для обеспечения позиционной системы отсчета. В этой связи для определения положения и кривизны передней и задней поверхностей можно использовать несколько точек, которые обычно отличаются друг от друга, а также значения толщины и диаметра хрусталика человеческого глаза. На основе этих данных тело, выполненное из двух половин эллипсоидных тел с заданными параметрами, можно аппроксимировать и визуализировать хрусталик глаза для практических целей. В другом варианте реализации информация из захваченных изображений может быть скомбинирована с информацией от других источников, например, измерения толщины хрусталика до оперативного вмешательства, которые используют в качестве входных сигналов для контроллера.
На фиг.8 показан пример лазерной хирургической системы с наведением по сформированным изображениям, имеющей отдельную лазерную хирургическую систему 2100 и отдельную систему 2200 формирования изображений. Лазерная хирургическая система 2100 включает в себя источник 2130 лазерного излучения с хирургическим лазером, который создает хирургический лазерный луч 2160, состоящий из хирургических лазерных импульсов. Для направления хирургического лазерного луча 2160 из источника 2130 лазерного излучения на ткань-мишень 1001 через интерфейс 2150 пациента обеспечен модуль 2140 подачи лазерного луча, который предназначен для сканирования хирургическим лазерным лучом 2160 ткани-мишени 1001 вдоль заранее определенного хирургического шаблона. Для управления работой хирургического лазера в источнике 2130 лазерного излучения через канал 2121 связи предусмотрен модуль 2120 управления лазером, который управляет модулем 2140 подачи лазерного луча через канал 2122 связи для создания заранее определенного хирургического шаблона. Держатель интерфейса пациента предусмотрен для того, чтобы обеспечить стыковку интерфейса 2150 пациента с тканью-мишенью 1001 для удерживания ткани-мишени 1001 в правильном положении. Интерфейс 2150 пациента может быть реализован таким образом, что он будет включать в себя контактную линзу или уплощенную линзу с плоской или искривленной поверхностью для удобной стыковки с передней поверхностью глаза и удерживания глаза в правильном положении.
Система 2200 формирования изображений на фиг.8 может представлять собой модуль OCT, расположенный относительно интерфейса 2150 пациента хирургической системы 2100 с соблюдением известного пространственного соотношения относительно интерфейса 2150 пациента и ткани-мишени 1001, зафиксированной относительно интерфейса 2150 пациента. Этот OCT модуль 2200 может иметь конфигурацию, предусматривающую наличие собственного интерфейса 2240 пациента для взаимодействия с тканью-мишенью 1001. Система 2200 формирования изображений включает в себя модуль 2220 управления формированием изображений и подсистему 2230 формирования изображений. Подсистема 2230 включает в себя источник света для создания луча 2250, формирующего изображения, для формирования изображения мишени 1001 и модуль подачи луча, формирующего изображения, для направления оптического зондирующего луча или луча 2250, формирующего изображения, на ткань-мишень 1001 и приема обратного света 2260 оптического луча 2250, формирующего изображения, от ткани-мишени 1001 для захвата изображений OCT ткани-мишени 1001. Оптический луч 2250, формирующий изображения, и хирургический луч 2160 могут направляться на ткань-мишень 1001 одновременно, чтобы иметь возможность формировать изображение последовательно или одновременно с хирургической операцией.
Как показано на фиг.8, как в лазерной хирургической системе 2100, так и в системе 2200 формирования изображений предусмотрены коммуникационные интерфейсы 2110 и 2210 для обеспечения связи в процессе управления, осуществляемого модулем 2120 управления лазером, и формирования изображений системой 2200 формирования изображений, так что OCT модуль 2200 может посылать информацию о захваченных изображениях OCT в модуль 2120 управления лазером. Модуль 2120 управления лазером в этой системе реагирует на информацию о захваченных OCT изображениях, приводя в действие модуль 2140 подачи лазерного луча, который осуществляет фокусировку и сканирование хирургическим лазерным лучом 2160 и динамическую регулировку фокусировки и сканирования мишени-ткани 1001 хирургическим лазерным лучом 2160 на основе позиционирующей информации в захваченных изображениях OCT. Интеграция лазерной хирургической системы 2100 и системы 2200 формирования изображений реализуется в основном посредством связи между коммуникационными интерфейсами 2110 и 2210 на программном уровне.
В этом и других примерах также могут быть интегрированы различные подсистемы или устройства. Например, в рассматриваемой системе могут быть предусмотрены некоторые диагностические приборы, такие как аберрометры волнового фронта, устройства для измерения топографических параметров роговой оболочки, либо может быть использована предоперационная информация от этих устройств для повышения качество интраоперационного формирования изображений.
На фиг.9 показан пример лазерной хирургической системы с наведением по сформированным изображениям, имеющей дополнительные возможности интеграции. Система формирования изображений и хирургическая система имеют общий интерфейс 3300 пациента, который фиксирует ткань-мишень 1001 (например, глаз), а не два отдельных интерфейса пациента, как на фиг.8. Хирургический луч 3210 и луч 3220, формирующий изображение, объединяются в интерфейсе 3330 пациента и направляются в мишень 1001 общим интерфейсом 3300 пациента. Вдобавок предусмотрен общий модуль 3100 управления для управления как подсистемой 2230 формирования изображений, так и хирургической частью (источник 2130 лазерного излучения и система 2140 подачи луча). Эта повышенная интеграция между частью для формирования изображений и хирургической частью позволяет обеспечить точную калибровку обеих подсистем и стабильность положения пациента, а также операционный объем. Предусмотрен общий корпус 3400, вмещающий как хирургическую подсистему, так и подсистему формирования изображений. При отсутствии интеграции обеих подсистем в общем корпусе общий интерфейс 3300 пациента может составлять часть либо подсистемы формирования изображений, либо хирургической подсистемы.
На фиг.10 показан пример лазерной хирургической системы с наведением по сформированным изображениям, где лазерная хирургическая система и система формирования изображений используют общий модуль 4100 подачи луча и общий интерфейс 4200 пациента. Такая интеграция дополнительно упрощает конструкцию системы и управление системой.
В одном варианте реализации система формирования изображений в вышеописанном и других примерах может представлять собой систему на основе оптической компьютерной томографии (OCT), а лазерной хирургической системой является офтальмологическая хирургическая система на основе фемтосекундного или пикосекундного лазера. В OCT свет, исходящий из низкокогерентного широкополосного источника света, такого как суперлюминесцентный диод, расщепляется на отдельные лучи: эталонный и сигнальный. Сигнальным лучом является луч, формирующий изображение, который посылается на хирургическую мишень, а обратный свет луча, формирующего изображения, собирается и когерентно рекомбинируется с эталонным лучом, образуя интерферометр. Сканирование сигнальным лучом в направлении, перпендикулярном оптической оси системы линз или направлению распространения света обеспечивает пространственное разрешение в направлении x-y, в то время как разрешающая способность по глубине вытекает из выявления различий между значениями длины тракта эталонного плеча и возвращенного сигнального луча в сигнальном плече интерферометра. Хотя сканер x-y в различных реализациях OCT по существу одинаков, сравнение значений длины тракта и получение информации о сканировании по z может осуществляться различными путями. В одном варианте реализации, известном как OCT во временной области, эталонное плечо, например, непрерывно изменяется для изменения длины тракта, когда фотодетектор обнаруживает интерференционную модуляцию интенсивности рекомбинированного луча. В другом варианте реализации эталонное плечо фактически является статическим, и анализируется спектр комбинированного света на предмет интерференции. Преобразование Фурье для спектра комбинированного луча обеспечивает пространственную информацию о рассеянии изнутри образца. Этот метод известен как метод OCT в спектральной области или с преобразованием Фурье. В другом варианте реализации, известном как OCT с качанием частоты (S.R.Chinn, et. al., Opt. Lett. 22, 1997), используется узкополосный источник света с быстрым качанием частоты по спектральному диапазону. Интерференция между эталонным и сигнальным плечами обнаруживается быстродействующим детектором и динамическим анализатором сигнала. В этих примерах в качестве источника света можно использовать лазер с внешним объемным резонатором или лазер с синхронизованными модами и перестройкой частоты (FDML), разработанный для этой цели (R.Huber et.al. Opt. Express, 13, 2005) (S.H. Yun, IEEE J. of Sel. Q. El. 3(4) p.1087-1096, 1997). Фемтосекундный лазер, используемый в качестве источника света в системе OCT, может иметь достаточно широкую полосу и может обеспечить дополнительные преимущества, вытекающие из увеличения отношений сигнал-шум.
Устройство формирования изображений на основе OCT в системах, раскрытых в этом документе, можно использовать для выполнения различных функций по формированию изображений. Например, OCT можно использовать для игнорирования сложных соединений, являющихся следствием оптической конфигурации системы или наличием уплощающей пластины, для захвата изображений OCT в выбранных местах внутри ткани-мишени для обеспечения информации для трехмерного позиционирования с целью управления фокусировкой хирургического лазерного луча и сканированием внутри ткани-мишени, или для захвата изображений OCT в выбранных местах на поверхности ткани-мишени или на уплощающей пластине для обеспечения совмещения с целью управления изменениями ориентации, которые появляются при позиционных изменениях мишени, например, при переходе от вертикального положения к горизонтальному. Калибровка OCT может быть выполнена с использованием процесса совмещения позиционирования на основе размещения меток или маркеров с одной позиционной ориентацией мишени, которые затем могут быть обнаружены модулем OCT при изменении позиционной ориентации мишени. В других вариантах реализации систему формирования изображений на основе OCT можно использовать для создания зондирующего поляризованного светового луча для сбора информации о внутренней структуре глаза оптическим путем. Лазерный луч и зондирующий световой луч могут иметь разную поляризацию. OCT может содержать механизм управления поляризацией, который осуществляет управление зондирующим светом, используемым для упомянутой оптической томографии, для обеспечения одинаковой поляризации при прохождении луча в направлении глаза и разной поляризации при прохождении луча от глаза. Механизм управления поляризацией может включать в себя, например, волновую пластину или фарадеевский вращатель.
На фиг.10 система показана в виде конфигурации со спектральной OCT, где имеется возможность совместного использования фокусирующей части модуля подачи луча хирургической системой и системой формирования изображений. Основные требования к оптике относятся к рабочей длине волны, качеству изображения, разрешающей способности, искажению и т.д. Лазерная хирургическая система может представлять собой систему на основе фемтосекундного лазера с большой числовой апертурой, предназначенной для обеспечения дифракции, ограниченной размерами фокального пятна, например, приблизительно от 2 до 3 микрометров. Разные фемтосекундные лазеры для офтальмологической хирургии могут работать на разных длинах волн, например, на длинах волн в районе 1,05 микрометра. Рабочая длина волны устройства формирования изображений может быть выбрана близкой к длине волны лазера, так чтобы обеспечить хроматическую компенсацию оптики для обеих длин волн. Указанная система может включать в себя третий оптический канал, канал визуального наблюдения, например хирургический микроскоп, что обеспечивает дополнительное устройство формирования изображений для фиксации изображений ткани-мишени. Если в оптическом тракте для этого третьего оптического канала используется та же самая оптика, что и для хирургического лазерного луча и света от устройства формирования изображений на основе OCT, то конфигурация совместно используемой оптики может обеспечивать хроматическую компенсацию в видимом спектральном диапазоне для третьего оптического канала и спектральных диапазонах для хирургического лазерного луча и луча, формирующего изображение на основе OCT.
На фиг.11 показан конкретный пример технического решения для системы на фиг.9, где сканер 5100 для сканирования хирургическим лазерным лучом и нормализатор 5200 луча для нормализации (коллимация и фокусировка) хирургического лазерного луча, отделены от оптики в модуле 5300 формирования изображений OCT для управления лучом, формирующим изображения, при использовании OCT. Хирургическая система и система формирования изображений совместно используют модуль объектива 5600 и интерфейс 3300 пациента. Объектив 5600 направляет и фокусирует как хирургический лазерный луч, так и луч, формирующий изображение, в направлении интерфейса 3300 пациента, причем управление фокусировкой осуществляется модулем 3100 управления. Для направления хирургического луча и луча, формирующего изображения, предусмотрено два разделителя 5410 и 5420 луча. Разделитель 5420 луча также используется для направления обратного луча, формирующего изображения, в модуль 5300 формирования изображений с использованием OCT. Два разделителя 5410 и 5420 луча также направляют свет от мишени 1001 в оптический блок 5500 визуального наблюдения для обеспечения прямого вида или изображения мишени 1001. Блок 5500 может представлять собой систему формирования изображений с помощью линз для хирурга, наблюдающего за мишенью 1001, или может представлять собой камеру для фиксации изображения или видео мишени 1001. Возможно использование различных разделителей (сплиттеров) луча, таких как дихроичные и поляризационные сплиттеры луча, оптический решетчатый голографический сплиттер луча или их комбинации.
В некоторых вариантах реализации оптические компоненты могут быть покрыты в соответствующих местах антиотражательным покрытием как для длины волны хирургического луча, так и для длины волны OCT, с целью уменьшения отсвечивания от множества поверхностей на оптическом тракте луча. Если этого не сделать, то отражения уменьшат пропускную способность системы и уменьшат отношение сигнал-шум из-за увеличения фонового света в блоке формирования изображений на основе OCT. Один из путей уменьшения отсвечивания при использовании OCT состоит в повороте плоскости поляризации обратного света от образца с помощью волновой пластины изолятора Фарадея, размещенной рядом с тканью-мишенью, и ориентации поляризатора перед детектором OCT, чтобы обеспечить предпочтительные условия для обнаружения света, поступающего обратно от образца, и чтобы подавить свет, рассеянный оптическими компонентами.
В лазерной хирургической системе каждый хирургический лазер и система OCT могут иметь сканер луча для покрытия одной и той же хирургической области в ткани-мишени. Следовательно, появляется возможность интегрирования сканирования для хирургического лазерного луча и сканирования для луча, формирующего изображение с целью совместного использования общих сканирующих устройств.
На фиг.12 подробно показан пример такой системы. В этом варианте реализации x-y сканер 6410 и z сканер 6420 совместно используются обеими подсистемами. Предусмотрена общая система 6100 управления для управления системными операциями для хирургических операций и операций по формированию изображения. Подсистема OCT включает в себя источник 6200 света OCT, создающий свет, формирующий изображение, который расщепляется на луч, формирующий изображения, и эталонный луч с помощью сплиттера 6210 луча. Луч, формирующий изображения, комбинируется с хирургическим лучом в сплиттере 6310 луча для распространения по общему оптическому тракту, ведущему к мишени 1001. Сканеры 6410 и 6420, а также блок 6430 нормализатора луча размещены вслед за сплиттером 6310 луча. Сплиттер 6440 луча используется для направления луча, формирующего изображения, и хирургического луча на объектив 5600 и интерфейс 3300 пациента.
В подсистеме на основе OCT эталонный луч передается через сплиттер 621 луча в устройство 6220 оптической задержки и отражается обратным зеркалом 6230. Луч, формирующий изображения, возвращенный от мишени 1001, направляется обратно к сплиттеру 6310 луча, который отражает по меньшей мере часть возвращенного луча, формирующего изображения, на сплиттер 6210 луча, где отраженный эталонный луч и возвращенный луч, формирующий изображения, перекрываются и интерферируют друг с другом. Для обнаружения интерференции и создания изображений OCT мишени 1001 используют детектор-спектрометр 6240. Информация об изображениях OCT посылается в систему 6100 управления для управления хирургическим лазерным генератором 2130, сканерами 6410 и 6420 и объективом 5600 для управления лучом хирургического лазера. В одном варианте реализации устройство 6220 оптической задержки может регулироваться для изменения оптической задержки с целью определения различных значений глубины в ткани-мишени 1001.
Если системой на основе OCT является система во временной области, то в упомянутых двух подсистемах используют два разных z-сканера, поскольку эти два сканера действуют по-разному. В данном примере z сканер хирургической системы действует путем изменения дивергенции хирургического луча в блоке нормализатора луча без изменения значений длины тракта хирургического луча. С другой стороны, в системе с OCT во временной области сканирование в направлении z осуществляется путем физического изменения тракта луча с помощью переменной задержки или путем перемещения положения обратного зеркала эталонного луча. После калибровки модуль управления лазером может синхронизировать оба z сканера. Соотношение между двумя перемещениями может быть упрощено и сведено к линейной или полиномиальной зависимости, когда модуль управления может выполнять обработку или, в альтернативном варианте, калибровочные точки могут определить справочную таблицу для обеспечения правильного масштабирования. Устройства OCT, работающие в спектральной области/области преобразований Фурье, с источником качания частоты не имеют z сканер, и длина эталонного плеча остается постоянной. За исключением сокращения затрат перекрестная калибровка рассматриваемых двух систем будет относительно простой. В этом случае нет необходимости компенсировать различия, возникающие из-за искажений изображения в фокусирующей оптике, или из различий сканеров в указанных двух системах, поскольку они используются совместно.
В вариантах практической реализации хирургических систем фокусирующий объектив 5600 смонтирован на базе, имеющей возможность скольжения или перемещения, а вес объектива сбалансирован для ограничения усилия, действующего на глаз пациента. Интерфейс 3300 пациента может включать в себя уплощенную линзу, прикрепленную к держателю интерфейса пациента. Держатель интерфейса пациента прикреплен к монтажному блоку, который поддерживает фокусирующий объектив. Указанный монтажный блок предназначен для обеспечения стабильного соединения интерфейса пациента с системой в случае непредвиденного перемещения пациента и позволяет обеспечить мягкую стыковку интерфейса пациента с глазом. Возможны различные варианты реализации фокусирующего объектива, один из примеров которого описан в патенте США № 5336215, выданном Hsueh. Наличие регулируемого фокусирующего объектива позволяет изменять длину оптического тракта для зондирующего света, в качестве части оптического интерферометра для подсистемы, где используется OCT. Перемещение объектива 5600 и интерфейса 3300 пациента может изменить различие в длине тракта между эталонным лучом и сигнальным лучом, формирующим изображение на основе OCT, неконтролируемым образом, а это может ухудшить качество информации о глубине OCT, определяемой при использовании OCT. Это случается не только в системах, работающих во временной области, но также в системах, работающих в спектральной области/области преобразований Фурье.
На фиг.13-14 показаны примерные лазерные хирургические системы с наведением по сформированным изображениям, в которых решается техническая проблема, связанная с регулируемым фокусирующим объективом.
В системе на фиг.13 предусмотрено устройство 7110 измерения положения, связанное с подвижным фокусирующим объективом 7100, для измерения положения объектива 7100 на скользящем монтажном столике, где устройство 7110 передает измеренное значение положения в модуль 7200 управления в системе на основе OCT. Система 6100 управления может обеспечивать управление и изменять положение объектива 7100 для регулировки длины оптического пути, проходимого сигнальным лучом, формирующим изображения, при операции OCT, а кодер 7110 положения измеряет и контролирует положение объектива 7100, причем информация о положении объектива подается непосредственно в модуль 7200 управления OCT. Модуль 7200 управления в системе OCT использует, при формировании трехмерного изображения в процессе обработки данных OCT, алгоритм для компенсации различий между эталонным плечом и сигнальным плечом интерферометра внутри системы OCT, вызванные перемещением фокусирующего объектива 7100 относительно интерфейса 3300 пациента. Соответствующая величина изменения положения объектива 7100, вычисленная модулем 7200 управления OCT, посылается в модуль 6100 управления, который осуществляет управление объективом 7100, изменяя его положение.
На фиг.14 показана другая примерная система, где обратное зеркало 6230 в эталонном плече интерферометра системы OCT или по меньше мере одна часть в узле задержки в оптическом тракте системы OCT жестко прикреплена к подвижному фокусирующему объективу 7100, так что сигнальное плечо и эталонное плечо претерпевают одинаковое изменение длины оптического пути при перемещении объектива 7100. По существу, перемещение объектива 7100 по каретке автоматически компенсируется при различиях в длине тракта в системе OCT без обязательных вычислений, необходимых для компенсации.
В вышеописанных примерах лазерных хирургических систем с наведением по сформированным изображениям в лазерной хирургической системе и системе OCT используются разные источники света. Даже при более полной интеграции между лазерной хирургической системой и системой OCT фемтосекундный хирургический лазер в качестве источника света для хирургического лазерного луча также может быть использован в качестве источника света для системы OCT.
На фиг.15 показан пример использования фемтосекундного импульсного лазера в световом модуле 9100 для создания как хирургического лазерного луча для хирургических операций, так и зондирующего светового луча для формирования изображений с использованием OCT. Здесь предусмотрен разделитель 9300 луча для расщепления лазерного луча на первый луч в качестве хирургического лазерного луча и сигнального луча для OCT и второй луч в качестве эталонного луча для OCT. Первый луч направляется через x-y сканер 6410, который выполняет сканирование в направлениях x и y, перпендикулярных направлению распространения первого луча, и второй сканер (z сканер) 6420, который изменяет дивергенцию луча, настраивая фокусировку первого луча на ткань-мишень 1001. Этот первый луч выполняет хирургические операции на ткани-мишени 1001, а часть этого первого луча рассеивается назад к интерфейсу пациента и собирается объективом в виде сигнального луча для сигнального плеча оптического интерферометра системы OCT. Этот обратный свет комбинируется со вторым лучом, который отражается обратным зеркалом 6230 в эталонном плече и задерживается регулируемым элементом 6220 оптической задержки для OCT во временной области с целью управления различиями в тракте между сигнальным и эталонным лучами при формировании изображений разной глубины для ткани-мишени 1001. Система 9200 управления управляет системными операциями.
Хирургическая практика на роговой оболочке показала, что длительность импульса, составляющая несколько сот фемтосекунд, может оказаться достаточной для достижения хорошего хирургического результата при OCT с достаточной разрешающей способностью, более широкой полосой частот и более короткими импульсами, например, менее нескольких десятков фемтосекунд. В этом контексте техническое решение по устройству OCT предопределяет длительность импульсов, поступающих от фемтосекундного хирургического лазера.
На фиг.16 показана еще одна система с наведением по сформированным изображениям, где используется единый импульсный лазер 9100 для создания хирургического света и света, формирующего изображения. На выходном оптическом тракте фемтосекундного импульсного лазера размещена нелинейная среда 9400, расширяющая спектр, для использования нелинейного оптического процесса, такого как генерирование белого света или спектральное расширение, с целью расширения спектральной полосы импульсов от лазерного источника относительно более длинных импульсов, причем в хирургии обычно используется несколько сот фемтосекунд. Среда 9400 может представлять собой, например, оптоволоконный материал. Требования к интенсивности света в этих двух системах отличаются, и может быть реализован механизм для регулировки интенсивностей лучей для удовлетворения указанных требований к этим двум системам. Например, в оптических трактах обеих систем могут быть предусмотрены отклоняющие зеркала, обтюраторы или аттенюаторы луча для перекрытия луча и регулирования его интенсивности при получении изображения OCT или выполнении хирургической операции, чтобы защитить пациента и чувствительные инструменты от чрезмерной интенсивности света.
Вышеописанные примеры на фиг.8-16 можно использовать для выполнения лазерных хирургических операций с наведением по сформированным изображениям.
На фиг.17 показан один пример способа выполнения лазерной хирургической операции путем использования лазерной хирургической системы с наведением по сформированным изображениям. В этом способе используется интерфейс пациента в системе для стыковки с тканью-мишенью и удержания ее во время хирургической операции в правильном положении, и одновременно направляется хирургический лазерный луч, состоящий из импульсов, от лазера в системе и оптический зондирующий луч от модуля OCT в системе на интерфейс пациента в направлении ткани-мишени. Осуществляется управление хирургическим лазерным лучом для выполнения лазерной хирургической операции в ткани-мишени, а модуль ОСТ приводится в действие для получения изображений OCT внутри ткани-мишени на основе света оптического зондирующего луча, пришедшего обратно от ткани-мишени. Позиционная информация в полученных изображениях OCT применяется при фокусировке и сканировании хирургическим лазерным лучом для регулировки фокусировки и сканирования хирургическим лазерным лучом в ткани-мишени до или во время хирургической операции.
Хотя данное описание содержит множество специфических деталей, их не следует трактовать как ограничения объема изобретения или того, что может быть заявлено, а скорее как описания признаков, специфичных для конкретных вариантов. Некоторые признаки, которые описаны в этом описании в контексте отдельных вариантов, можно также реализовать в их сочетании в виде единого варианта. И наоборот, различные признаки, описанные в контексте одного варианта, можно также реализовать во множестве вариантов по отдельности или в любой подходящей субкомбинации. Кроме того, хотя признаки могут быть описаны как действующие в конкретных комбинациях или даже изначально заявленные как таковые, один или несколько признаков из заявленной комбинации могут в некоторых случаях быть исключены из этой комбинации, а заявленная комбинация может относиться к субкомбинации или варианту субкомбинации.
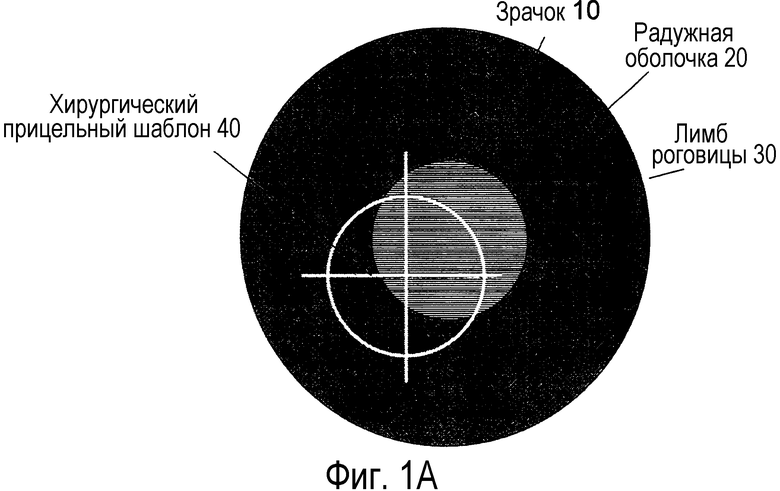
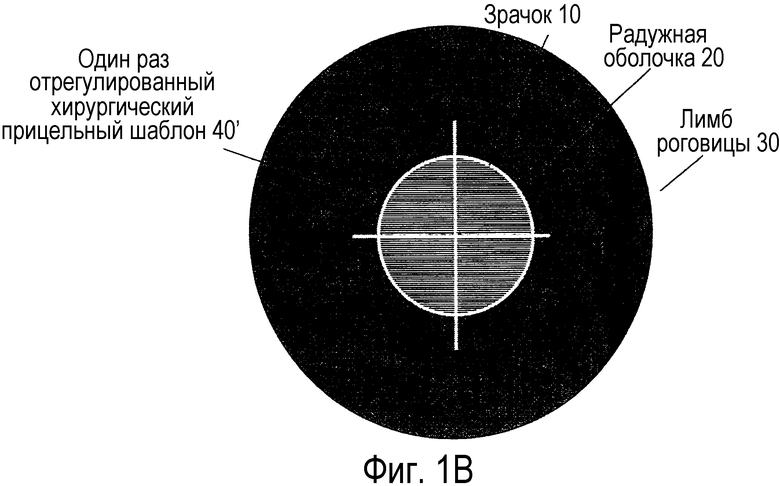
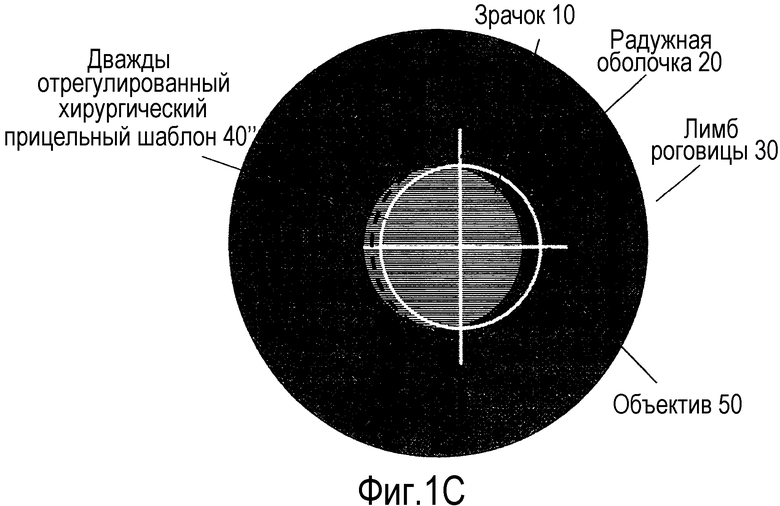
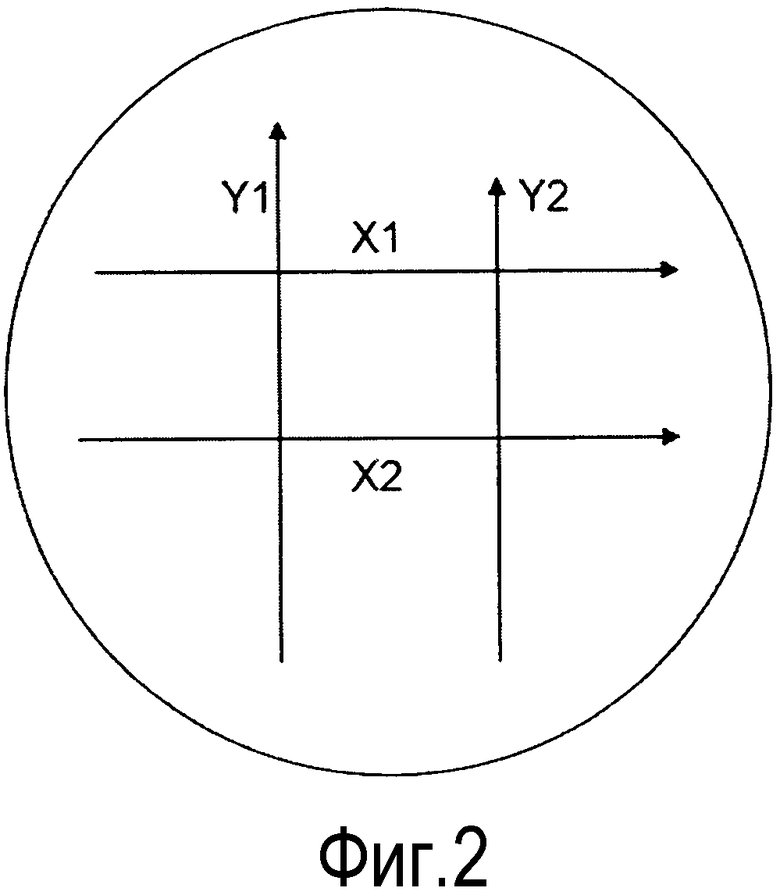
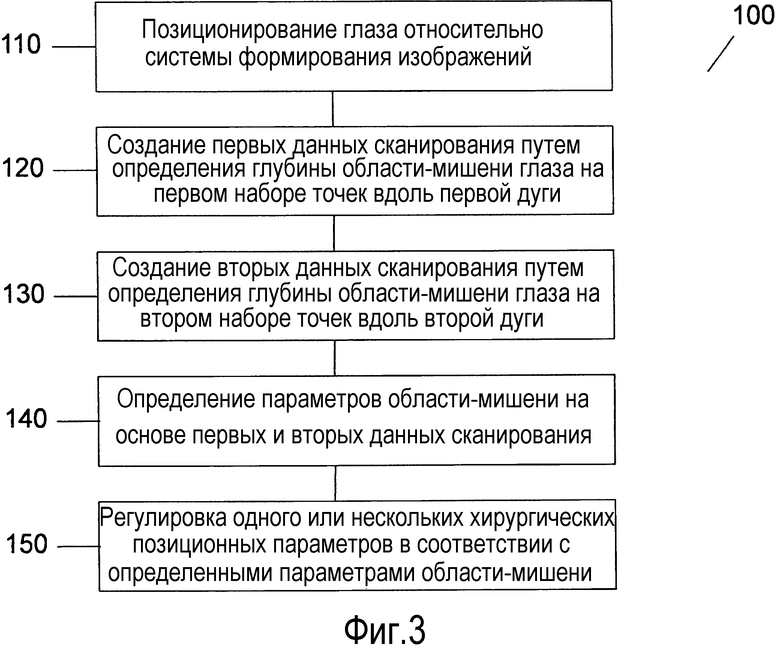
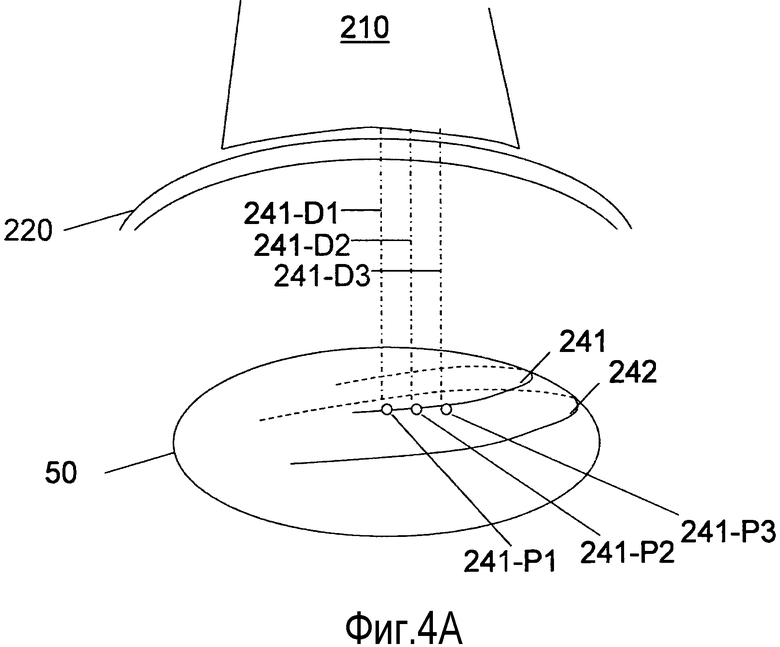
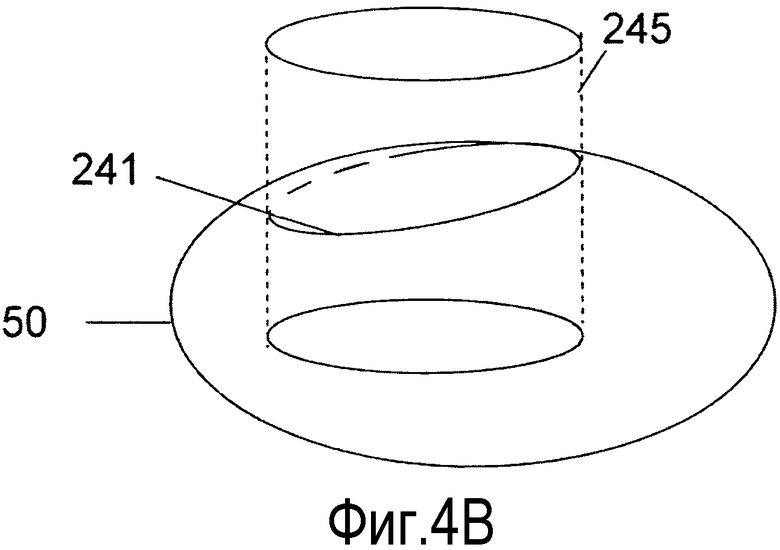
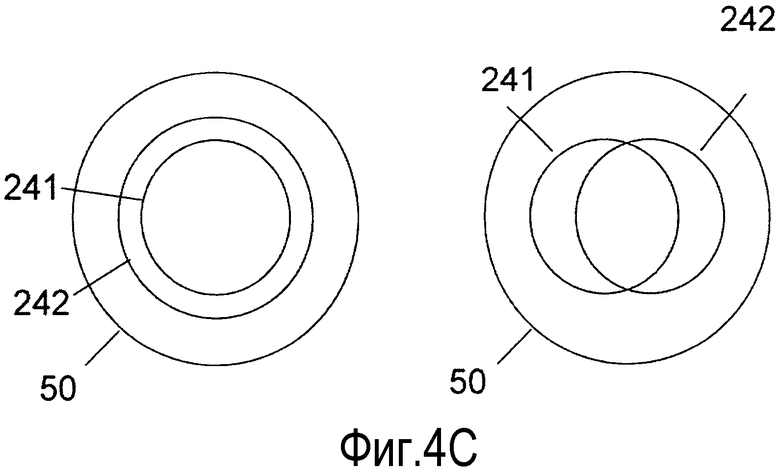
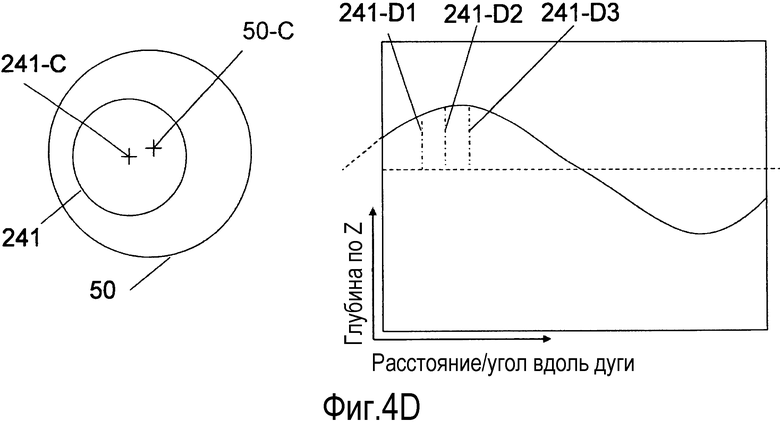
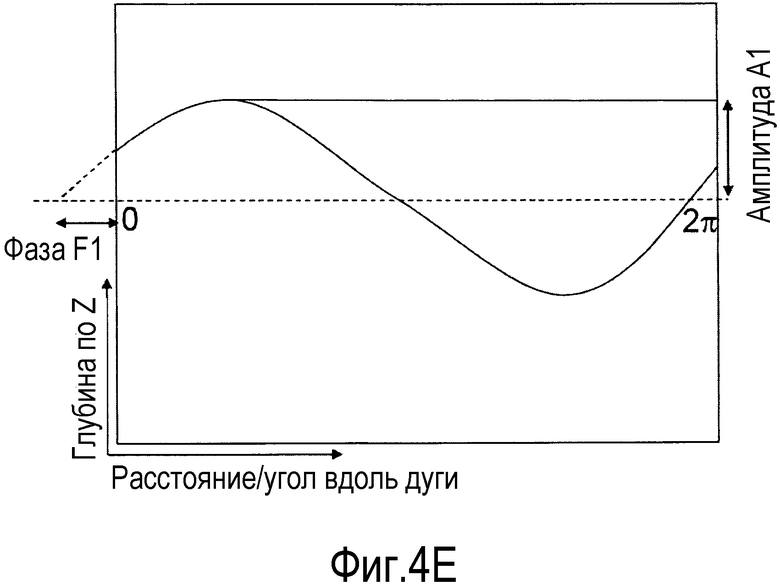
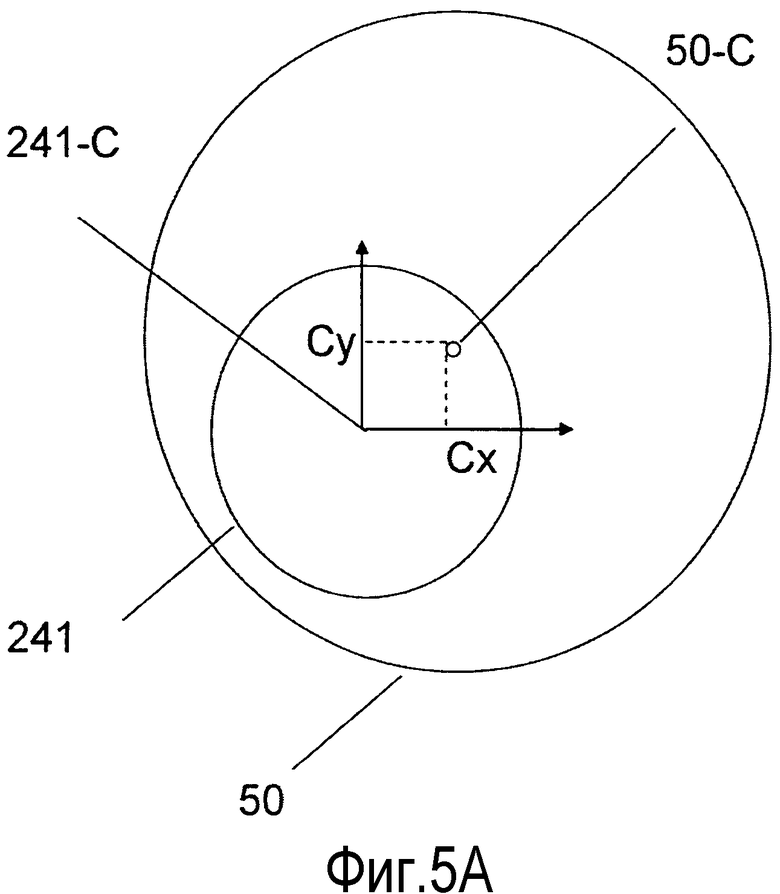
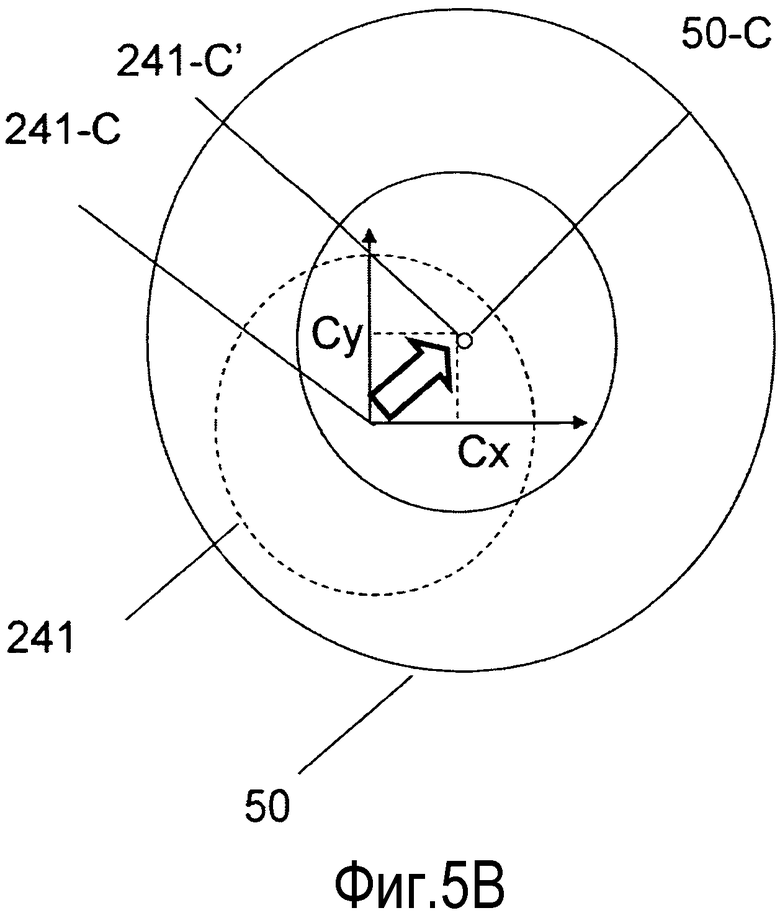
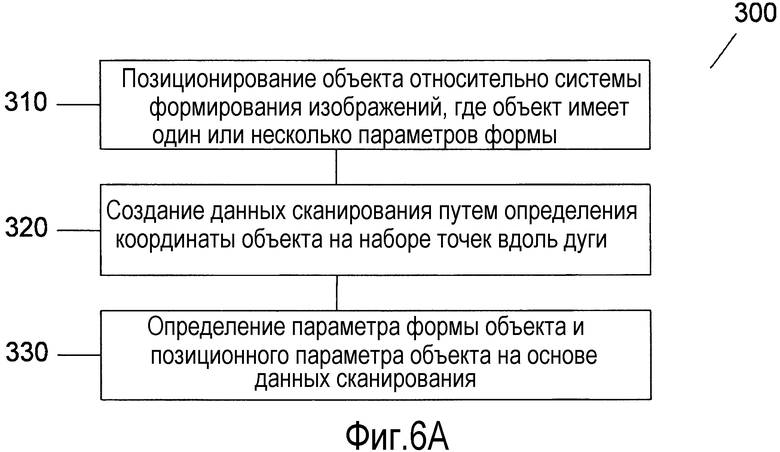
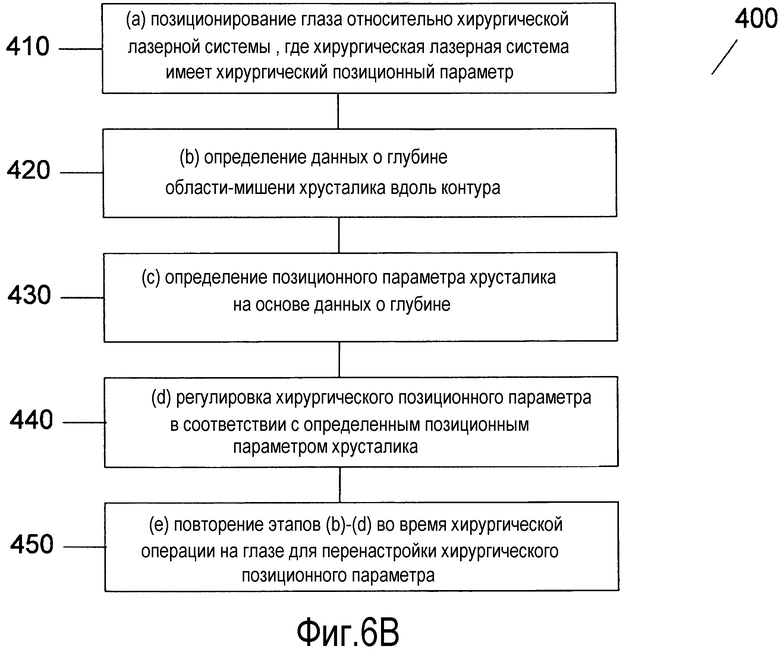
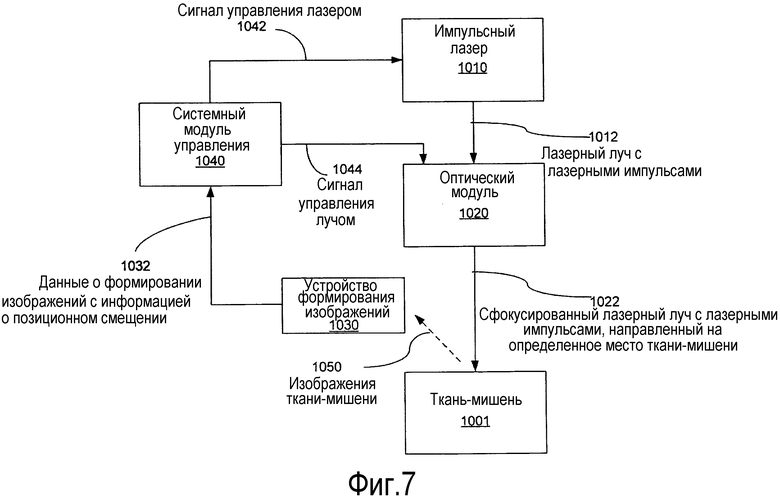
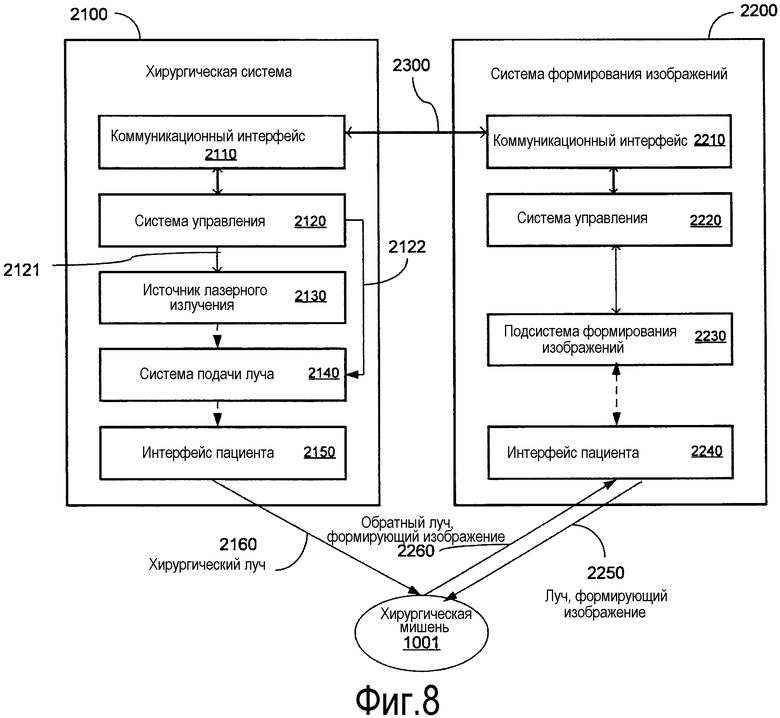
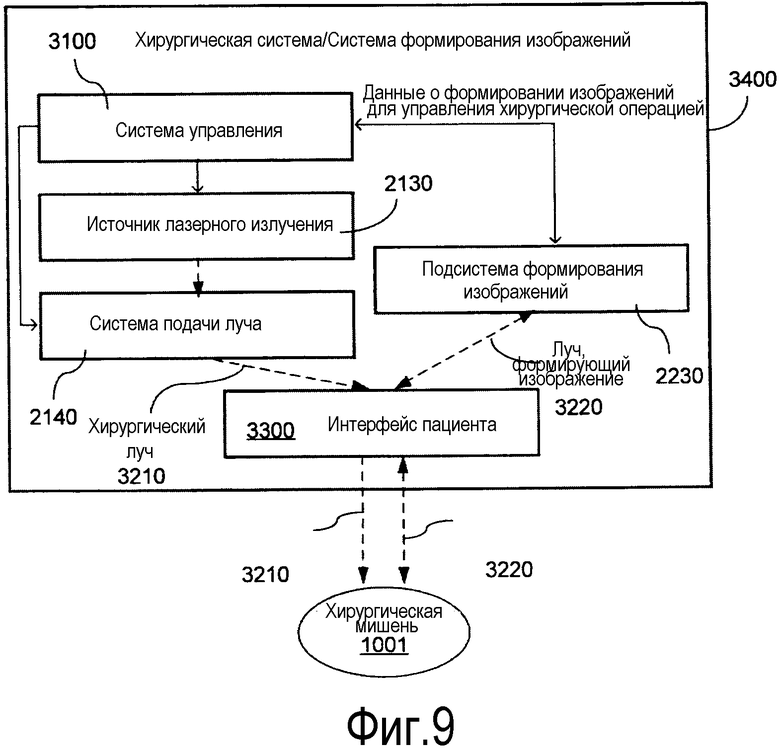
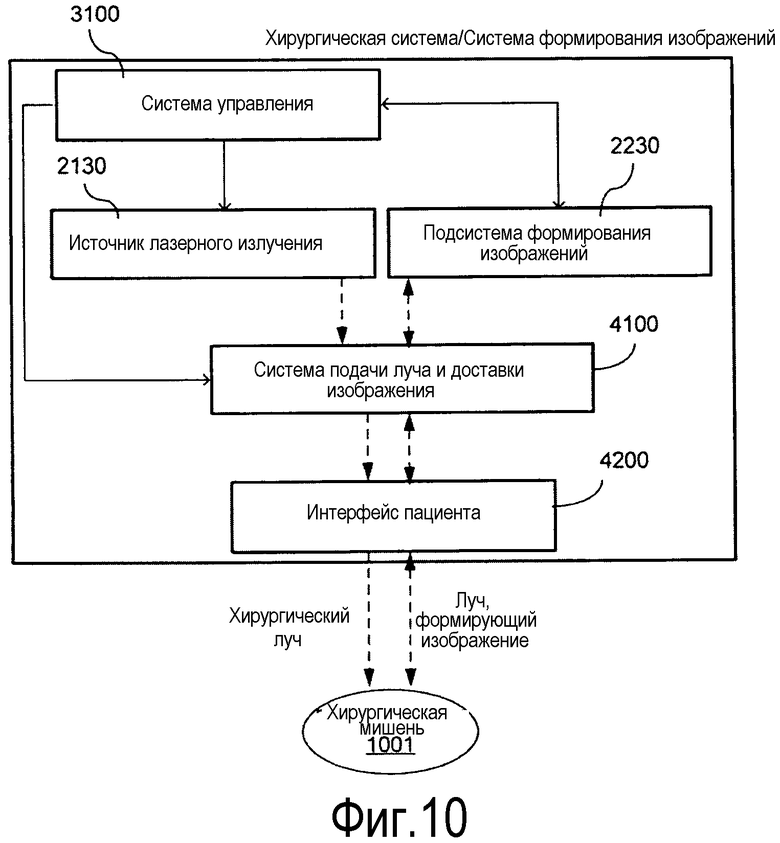
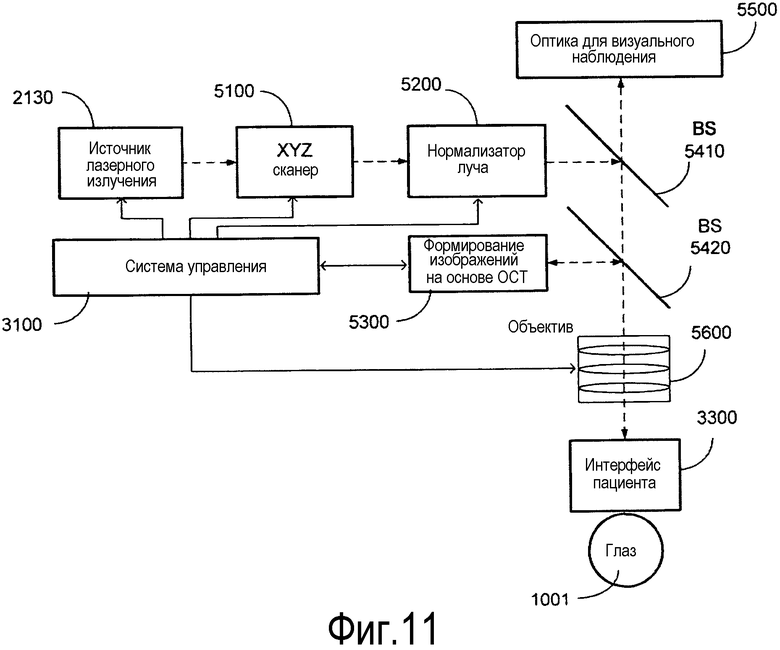
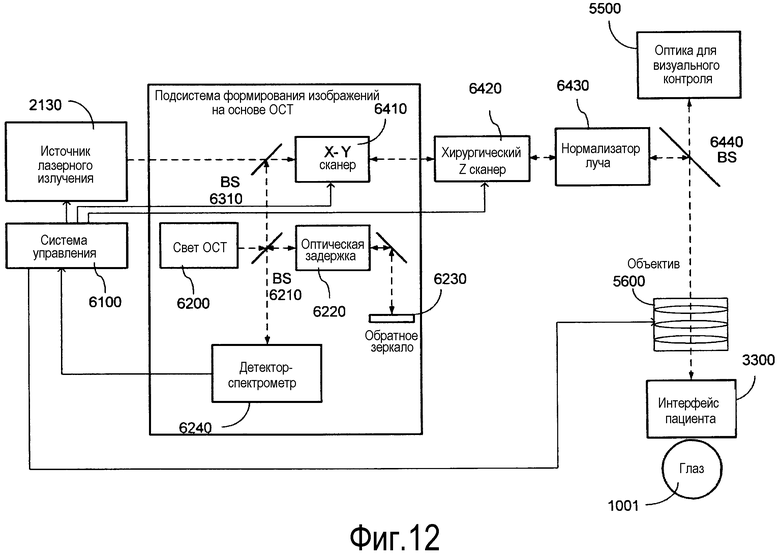
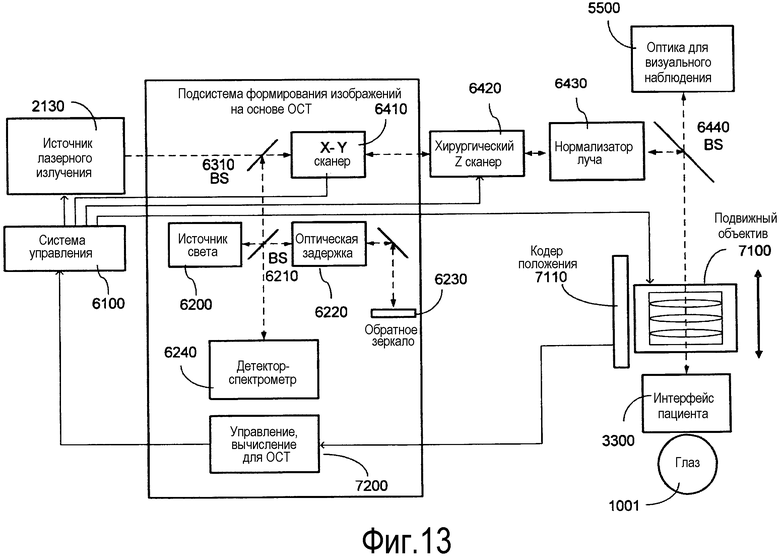
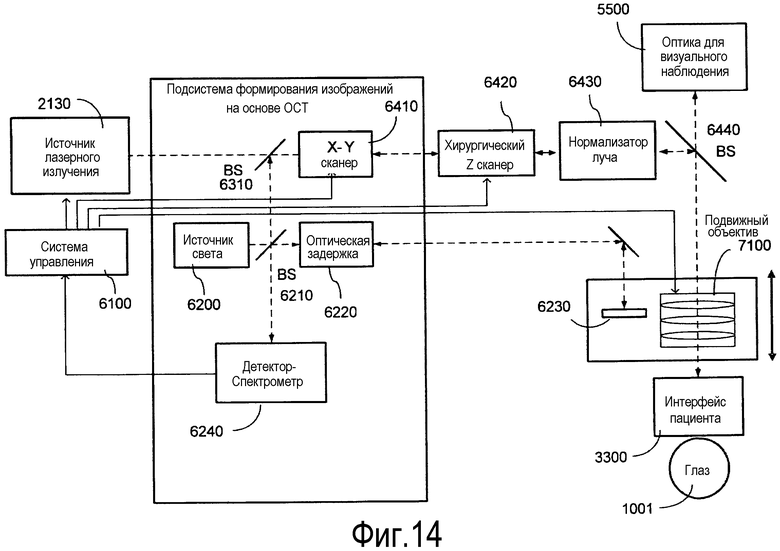
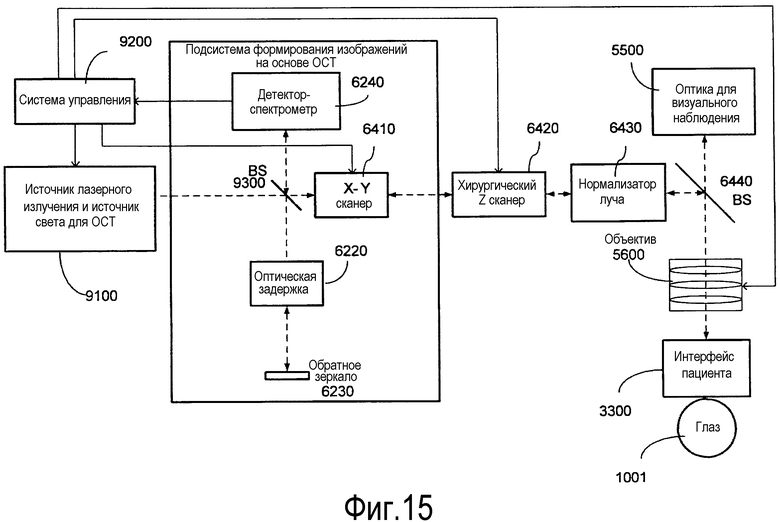
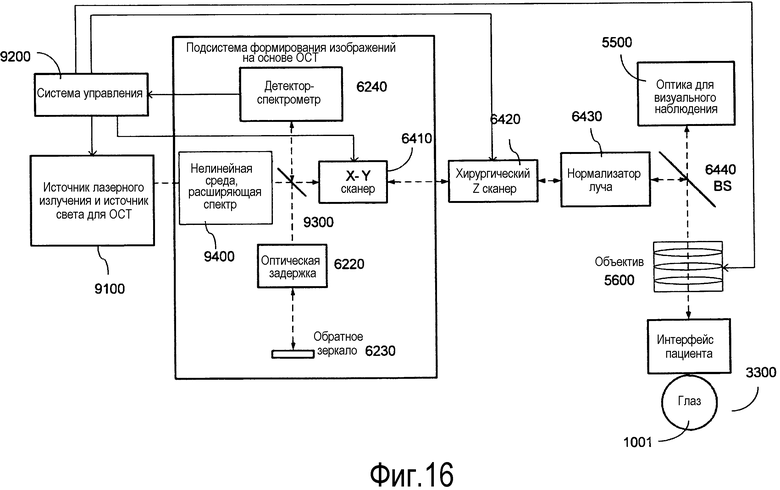
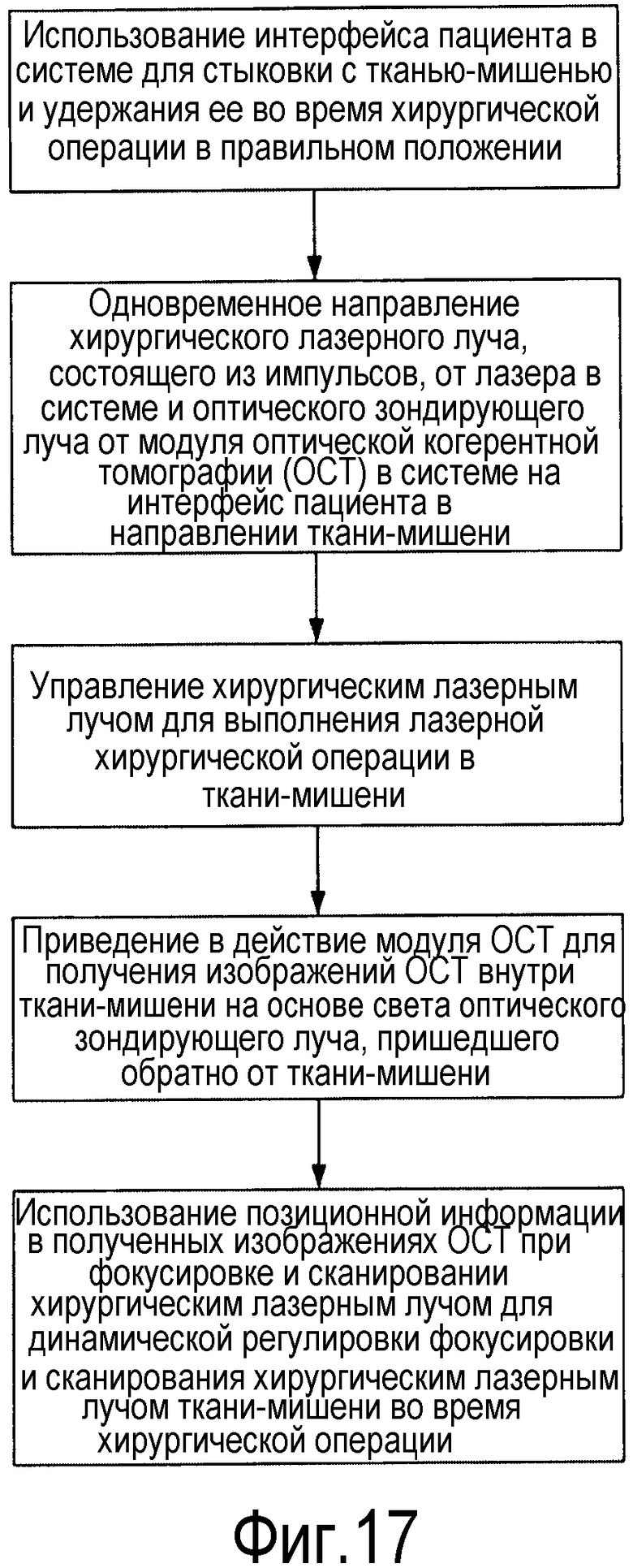
Заявлена группа изобретений для лазерной хирургии на основе формирования изображений ткани-мишени посредством нелинейного сканирования. После размещений интерфейса пациента лазерной хирургической системы и системы формирования изображений на глазу создают первые данные сканирования путем определения глубины области мишени глаза на первом наборе точек вдоль первой дуги. Далее создают вторые данные сканирования путем определения глубины области-мишени глаза на втором наборе точек вдоль второй дуги. Определяют параметры области-мишени на основе первых и вторых данных с использованием системного модуля управления. Выполняют регулировку одного или нескольких позиционных параметров в соответствии с параметрами области-мишени посредством модуля системного управления. Группа изобретений позволяет увеличить точность позиционирования лазерной системы. 3 н. и 17 з.п. ф-лы, 17 ил.
1. Способ получения характеристик глаза, содержащий следующие этапы: создание первых данных сканирования путем определения глубины области-мишени глаза на первом наборе точек вдоль первой дуги посредством системы формирования изображений после размещения интерфейса пациента лазерной хирургической системы и системы формирования изображений на глазу; создание вторых данных сканирования путем определения глубины области-мишени глаза на втором наборе точек вдоль второй дуги посредством системы формирования изображений; определение параметров области-мишени на основе первых и вторых данных сканирования системным модулем управления; и выполнение регулировки одного или нескольких позиционных параметров в соответствии с определенными параметрами области-мишени посредством системного модуля управления.
2. Способ по п.1, в котором этап определения глубины содержит:
формирование изображений области-мишени глаза по меньшей мере одним из следующих способов: оптическая когерентная томография (ОСТ), ультразвуковой способ, микроскопический способ и/или интерференционный способ.
3. Способ по п.1, в котором: областью-мишенью глаза является одно из: область-мишень роговой оболочки, передняя поверхность хрусталика, задняя поверхность хрусталика, область-мишень хрусталика, офтальмологический слой или поверхность, ограниченная зрачком.
4. Способ по п.1, в котором по меньшей мере одна из первой дуги и второй дуги образует по меньшей мере часть замкнутого контура.
5. Способ по п.1, в котором первая дуга является частью первой линии пересечения, где первый цилиндр пересекает область-мишень глаза; и вторая дуга является частью второй линии пересечения, где второй цилиндр пересекает область-мишень глаза.
6. Способ по п.1, в котором этап определения параметров области-мишени содержит: извлечение характеристик сканирования из первых и вторых данных сканирования.
7. Способ по п.6, в котором этап извлечения характеристик сканирования содержит: извлечение первой амплитуды и первой фазы из первых данных сканирования; и извлечение второй амплитуды и второй фазы из вторых данных сканирования.
8. Способ по п.7, в котором этап определения параметров области-мишени содержит определение позиционного параметра центра области-мишени на основе первой амплитуды, первой фазы, второй амплитуды и второй фазы.
9. Способ по п.7, в котором этап определения параметров области-мишени содержит определение параметра формы объекта области-мишени на основе первой амплитуды, первой фазы, второй амплитуды и второй фазы.
10. Способ по п.7, в котором этап определения параметров области-мишени содержит определение параметра ориентации объекта на основе первой амплитуды, первой фазы, второй амплитуды и второй фазы.
11. Способ по п.7, в котором этап определения параметров области-мишени содержит определение обновления позиционного параметра, связанного с позицией области-мишени и точкой отсчета.
12. Способ по п.1, в котором регулировка позиционного параметра содержит регулировку позиционного параметра центра шаблона для выравнивания центра шаблона по центру области-мишени.
13. Способ по п.1, в котором в способе после первого сканирования и второго сканирования не содержится ни одного сканирования.
14. Способ по п.1, в котором время от начала первого этапа сканирования до окончания этапа определения позиционных параметров не превышает одно из следующих значений: 100 миллисекунд, 1000 миллисекунд или 10000 миллисекунд.
15. Способ по п.1, в котором по меньшей мере одна из первой и второй дуг является эллиптической.
16. Способ по п.1, в котором по меньшей мере одна из первой и второй дуг является открытой дугой; и по меньшей мере одни из первых и вторых данных сканирования имеют максимум и минимум.
17. Способ по п.1, в котором область-мишень глаза является областью хрусталика глаза; параметры области-мишени содержат параметр формы хрусталика, параметр наклона хрусталика и позиционный параметр хрусталика.
18. Способ по п.1, в котором этап определения параметров области-мишени содержит подбор функции по меньшей мере с одним подбираемым параметром для первого набора данных сканирования; и определение параметров области-мишени с использованием подбираемого параметра.
19. Способ формирования изображений объекта, причем способ содержит этапы: создание данных сканирования путем определения координаты объекта на наборе точек вдоль дуги посредством системы формирования изображений после размещения интерфейса пациента лазерной хирургической системы и системы формирования изображений на глазу; и определение параметра формы объекта и позиционного параметра объекта на основе упомянутых данных сканирования системным модулем управления.
20. Способ ведения хирургической операции на глазе, содержащий следующие этапы:
(а) определение позиционных данных области-мишени хрусталика вдоль дуги сканирования посредством системы формирования изображений после размещения интерфейса пациента лазерной хирургической системы и системы формирования изображений на глазу, причем хирургическая лазерная система имеет хирургический позиционной параметр, а глаз имеет хрусталик;
(b) определение позиционного параметра хрусталика на основе упомянутых позиционных данных системным модулем управления;
(c) выполнение регулировки хирургического позиционного параметра в соответствии с определенным позиционным параметром хрусталика посредством системного модуля управления; и
(e) повторение этапов (a)-(c) во время хирургической операции на глазу для перенастройки хирургического позиционного параметра.
| US 20060195076 A1, 31.08.2006 | |||
| US 20090125005 А1, 14.05.2009 | |||
| US 20070282313 А1, 06.12.2007 | |||
| Карбюратор | 1925 |
|
SU8235A1 |
| WO 2006078802 A1, 27.07.2006. | |||

