Уровень техники
[0001] Некоторые устройства отображения используют сканирование с помощью источников света для формирования просматриваемых изображений. В одном примере, лазерный свет отражается сканирующей зеркальной системой под различными углами, чтобы сканировать лазер через пикселы проецируемого изображения. Управление цветом и/или силой света в каждом пикселе обеспечивает возможность проецирования изображения.
Сущность изобретения
[0002] Раскрыты примеры, которые связаны со сканирующими системами с наголовным дисплеем для отображения изображений. В одном примере, сканирующая система с наголовным дисплеем включает в себя источник света, датчик движения, сканирующую зеркальную систему, выполненную с возможностью сканировать свет из источника света, по меньшей мере, вдоль одной размерности, чтобы формировать изображение, и контроллер, выполненный с возможностью управлять сканирующей зеркальной системой с возможностью сканировать свет, чтобы формировать изображение, принимать данные движения головы из датчика движения и регулировать одно или более из частоты сканирования и смещения фазы между первым кадром и вторым кадром изображения на основе данных движения головы.
Это краткое изложение сущности изобретения приведено для представления в упрощенной форме подборки концепций, которые дополнительно описаны ниже в подробном описании. Данное краткое изложение сущности изобретения не имеет намерением ни идентификацию ключевых признаков или важнейших признаков заявленного изобретения, ни использование для ограничения объема заявленного изобретения. Кроме того, заявленное изобретение не ограничено реализациями, которые разрешают какие–либо или все недостатки, отмеченные в любой части данного раскрытия.
Краткое описание чертежей
[0003] Фиг. 1 показывает блок–схему примерного сканирующего MEMS–устройства с наголовным дисплеем.
[0004] Фиг. 2 показывает примерную схему следа лазера.
[0005] Фиг. 3 показывает другую примерную схему следа лазера.
[0006] Фиг. 4 показывает примерную лазерную головку в первой ориентации вращения.
[0007] Фиг. 5 показывает примерную лазерную головку по фиг. 4 во второй ориентации вращения.
[0008] Фиг. 6 показывает другую примерную схему следа лазера.
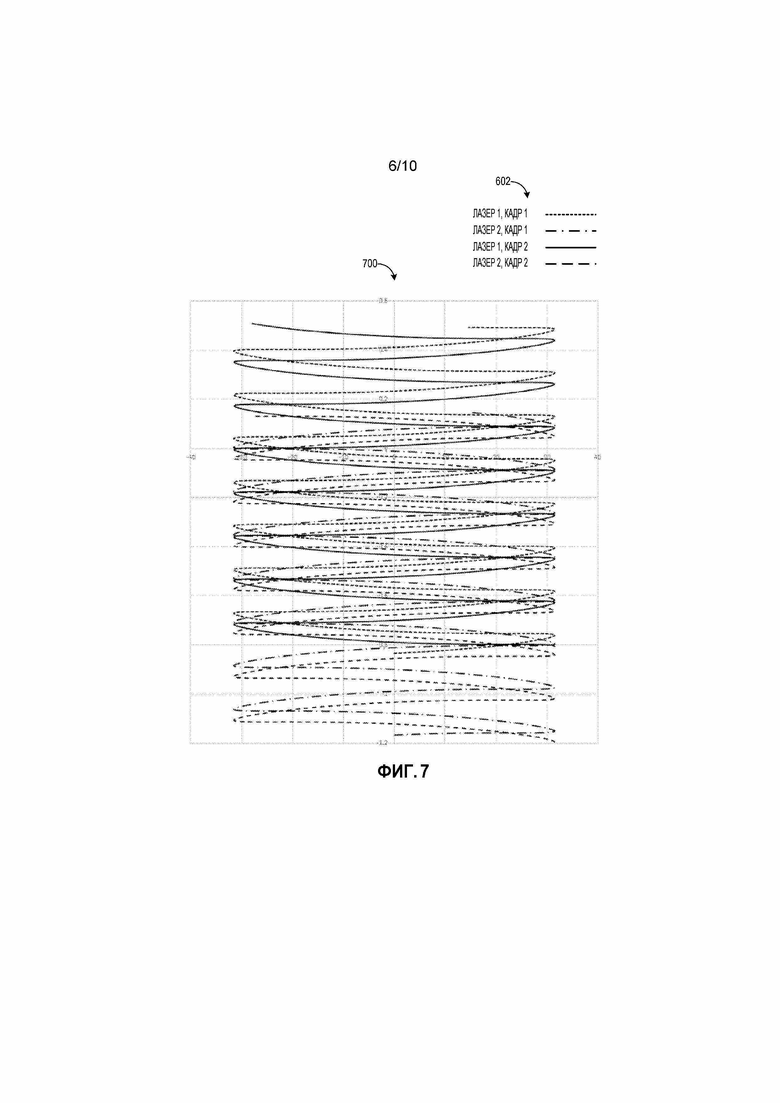
[0009] Фиг. 7 показывает другую примерную схему следа лазера.
[0010] Фиг. 8 показывает блок–схему последовательности операций, иллюстрирующую примерный способ динамического регулирования одного или более рабочих параметров сканирующего устройства с наголовным дисплеем.
[0011] Фиг. 9 показывает блок–схему другого примерного сканирующего устройства с наголовным дисплеем.
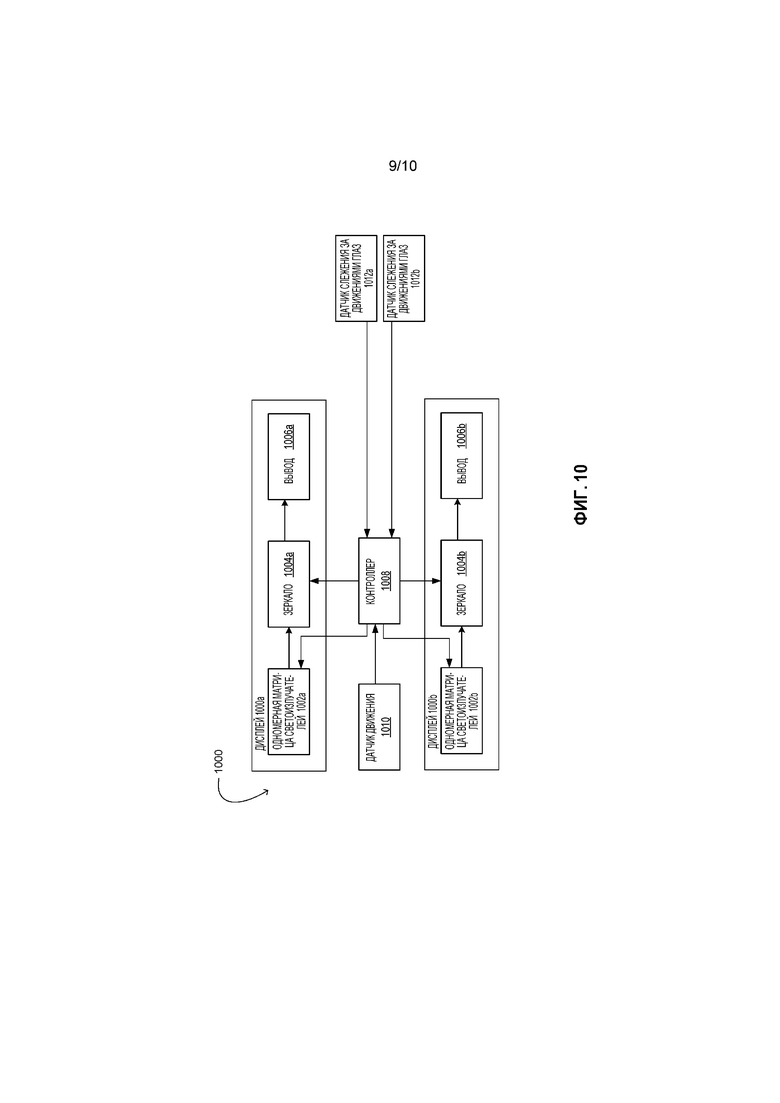
[0012] Фиг. 10 показывает блок–схему другого примерного сканирующего устройства с наголовным дисплеем.
[0013] Фиг. 11 показывает блок–схему примерного вычислительного устройства.
Подробное описание изобретения
[0014] Как описано выше, некоторые устройства отображения используют сканирование с помощью источников света для того, чтобы формировать просматриваемые изображения. В одном примере, лазерный свет отражается зеркальной системой под различными углами, чтобы проецировать отражаемый лазерный свет по всему полю зрения (FOV). Чтобы достигать диапазона углов отражения, подходящий актуатор, такой как актуатор на основе микроэлектромеханических систем (MEMS), может вращать зеркальную систему.
[0015] MEMS–актуатор может вращать зеркальную систему в горизонтальном и вертикальном направлениях, чтобы формировать просматриваемые изображения в двумерном FOV. С этой целью, зеркальная система может включать в себя одно зеркало, возбуждаемое в горизонтальном и вертикальном направлениях, или два зеркала, по отдельности возбуждаемые в горизонтальном и вертикальном направлениях. Различные частоты сканирования могут использоваться в горизонтальном и вертикальном направлениях. В системе с двумя зеркалами, например, зеркало с горизонтальным сканированием может возбуждаться на относительно высокой частоте (например, ~10 кГц), тогда как зеркало с вертикальным сканированием может возбуждаться на относительно меньшей частоте (например, ~60 Гц). Частоты горизонтального и вертикального сканирования могут, по меньшей мере, частично определять разрешение изображений, сформированных на этих частотах, наряду с другими факторами, такими как апертура (например, диаметр) зеркала и угол сканирования.
[0016] Тем не менее, текущая MEMS–технология налагает верхнее ограничение на частоты сканирования зеркал, в свою очередь, ограничивая разрешение отображения. В качестве примера, частота горизонтального сканирования в 27 кГц, комбинированная с частотой вертикального сканирования, равная 60 Гц, может давать в результате разрешение по вертикали, равное 720p. Значительно более высокие разрешения по вертикали (например, 1440p, 2160p) могут быть желательными, в частности, для реализаций на основе окологлазного дисплея, в которых 720p и аналогичные разрешения по вертикали могут выглядеть размытыми и имеющими низкое разрешение. Хотя увеличение частоты горизонтального и/или вертикального сканирования должно увеличивать разрешение отображения, первое может быть технологически неосуществимым, тогда как второе увеличивает потребление мощности. Дополнительно, высокие частоты сканирования могут, по меньшей мере, частично ограничивать угол зеркального сканирования и апертуру, если большие значения также являются желательными. Дополнительно, поддержка более высокого разрешения также может требовать большего размера зеркала вследствие дифракционного предела, ассоциированного с меньшими "пиксельными" размерами. Использование такого большего зеркала дополнительно может увеличивать трудности в достижении более высоких разрешений со сканирующими дисплеями, поскольку большее зеркало приводит к более низкой частоте сканирования.
[0017] В силу этого, раскрыты примеры для лазерного сканирующего MEMS–устройства отображения, выполненного с возможностью вывода высокого разрешения. Как описано ниже, чересстрочный режим работы нескольких лазеров может комбинироваться с переменными частотами сканирования и/или смещениями фазы между чересстрочными кадрами, чтобы достигать желательного разнесения между выходным сигналом лазера, в свою очередь, давая в результате желательное пиксельное разнесение и разрешение изображений. Использование нескольких лазеров обеспечивает сканирование нескольких строк в расчете на период зеркала, за счет этого давая возможность достижения более высокого разрешения без увеличения частоты сканирования зеркал, а также разрешает использование больших зеркал, что может помогать исключать проблемы с пиксельным размером, вызываемые посредством дифракционных пределов. Дополнительно, раскрыты примеры, в которых вывод из датчика слежения за движениями глаз используется для того, чтобы динамически изменять выходное разнесение лазера в качестве функции направления взгляда пользователя.
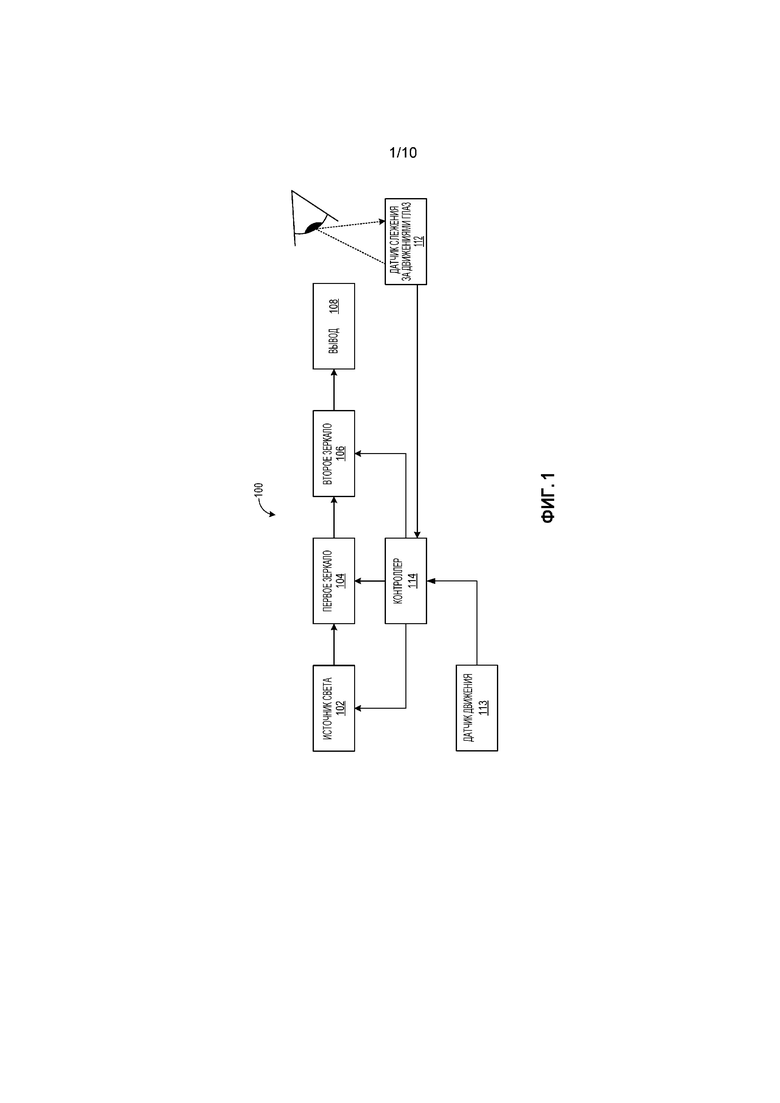
[0018] Фиг. 1 показывает блок–схему примерного устройства 100 отображения, показанного как лазерное сканирующее MEMS–устройство отображения. Устройство 100 отображения содержит источник 102 света, который, как подробнее описано ниже со ссылкой на фиг. 4 и 5, может принимать любую подходящую форму (например, одного или более твердотельных лазеров) и может выводить свет с одной или более длинами волн (например, свет в диапазонах длин волн красного, зеленого и/или синего цвета). Источник 102 света выводит свет для приема посредством первого зеркала 104, которое отражает свет, принимаемый из источника света, ко второму зеркалу 106. Первое зеркало 104 может быть выполнено с возможностью сканировать в горизонтальном (например, по оси X) направлении, в то время как второе зеркало 106 может быть выполнено с возможностью сканировать в вертикальном (например, по оси Y) направлении таким образом, что свет в конечном счете проецируется по всему двумерному FOV и формирует просматриваемые изображения. В других примерах, первое зеркало может сканировать вертикально, и второе зеркало может сканировать горизонтально.
[0019] Фиг. 1 показывает отражение света из второго зеркала 106 к выводу 108, в котором формируются просматриваемые изображения. Вывод 108 может принимать любую подходящую форму, такую как поверхность отображения, проекционная оптика, волноводная оптика и т.д. В качестве примера, устройство 100 отображения может быть сконфигурировано как устройство с наголовным дисплеем (HMD) в стиле виртуальной реальности с выводом 108, сконфигурированным как непрозрачная поверхность, либо как HMD–устройство в стиле смешанной реальности с выводом, сконфигурированным как частично прозрачная поверхность, через которую изображения, соответствующие окружающему физическому окружению, могут проходить и комбинироваться с лазерным светом. Устройство 100 отображения может принимать другие подходящие формы, к примеру, форму дисплея на лобовом стекле, экрана мобильного устройства, монитора, телевизионного приемника и т.д.
[0020] Чтобы обеспечивать формирование желательных изображений, актуатор 110 отдельно возбуждает первое и второе зеркала 104 и 106. В одном примере, актуатор 110 вращает первое зеркало 104 в горизонтальном направлении на первой, относительно большей частоте (например, 27 кГц, 35 кГц) и второе зеркало 106 в вертикальном направлении на второй относительно меньшей частоте (например, 60 Гц, 120 Гц). Вторая частота может быть фиксированной таким образом, что второе зеркало 106 сканируется вертикально непрерывно, в то время как в других примерах, вертикальное сканирование может выполняться пошагово таким образом, что второе зеркало имеет вертикальную скорость, практически равную нулю, до завершения строки горизонтального сканирования, и является ненулевой по завершению строки горизонтального сканирования, чтобы за счет этого переходить к последующей строке горизонтального сканирования. Зеркала 104 и 106 могут принимать любую подходящую форму, к примеру, форму зеркала с MEMS–актуатором (например, резонансного с пьезоэлектрическим актуатором).
[0021] В некоторых реализациях, устройство 100 отображения дополнительно может содержать датчик 112 слежения за движениями глаз, выполненный с возможностью обнаруживать направление взгляда пользователя устройства отображения. Направление взгляда может соотноситься с областью в пространстве для отображения, чтобы определять местоположение в выводе 108, в которое направляется взгляд пользователя. Как подробнее описано ниже со ссылкой на фиг. 3, один или более рабочих параметров (например, частота вертикального сканирования, смещение фазы) устройства 100 отображения могут изменяться в ответ на определенное местоположение взгляда. Датчик 112 может принимать любую подходящую форму. В качестве примера, датчик 112 может содержать один или более источников света (например, источников инфракрасного света), выполненных с возможностью заставлять блеск света отражаться от роговицы каждого глаза пользователя, и один или более датчиков изображений, которые захватывают изображения глаз пользователя, включающие в себя блеск(и).
[0022] В некоторых примерах, устройство 100 отображения дополнительно может содержать датчик 113 движения, выполненный с возможностью обнаруживать движение устройства отображения, например, возникающее в результате перемещения головы пользователя. Как подробнее описано ниже со ссылкой на фиг. 8, один или более рабочих параметров (например, частота вертикального сканирования, смещение фазы) устройства 100 отображения могут изменяться в ответ на обнаруженное движение. Датчик 113 движения может принимать любую подходящую форму. В качестве примера, датчик 113 движения может содержать один или более акселерометров, гироскопов и/или магнитометров.
[0023] Устройство 100 отображения дополнительно содержит контроллер 114 для осуществления подходов, описанных в данном документе. Контроллер 114 может управлять работой лазеров 102 (например, частотой, интенсивностью, рабочим циклом) и/или первого и/или второго зеркал 104 и 106. Контроллер 114 может принимать вывод из датчика 112 слежения за движениями глаз и/или датчика 113 движения, а также может регулировать работу лазеров, первого зеркала и/или второго зеркала на основе вывода датчика слежения за движениями глаз и/или вывода датчика движения.
[0024] Устройство 100 отображения может содержать альтернативные или дополнительные элементы, не показанные на фиг. 1. Например, один или более оптических элементов (например, коллиматор, рассеиватель, модуль комбинирования, собирающая линза, рассеивающая линза, голографический элемент) могут быть размещены в оптическом пути, вдоль которого перемещается лазерный свет, чтобы достигать желательных характеристик отображения. Устройство 100 отображения дополнительно может включать в себя подходящий источник мощности (например, аккумулятор, источник подачи мощности), чтобы предоставлять электрическую мощность в активные элементы устройства отображения. Кроме того, предусмотрены различные модификации устройства 100 отображения, к примеру, с включением одного зеркала вместо первого и второго зеркал 104 и 106, в которых одно зеркало сканируется в горизонтальном и вертикальном направлениях.
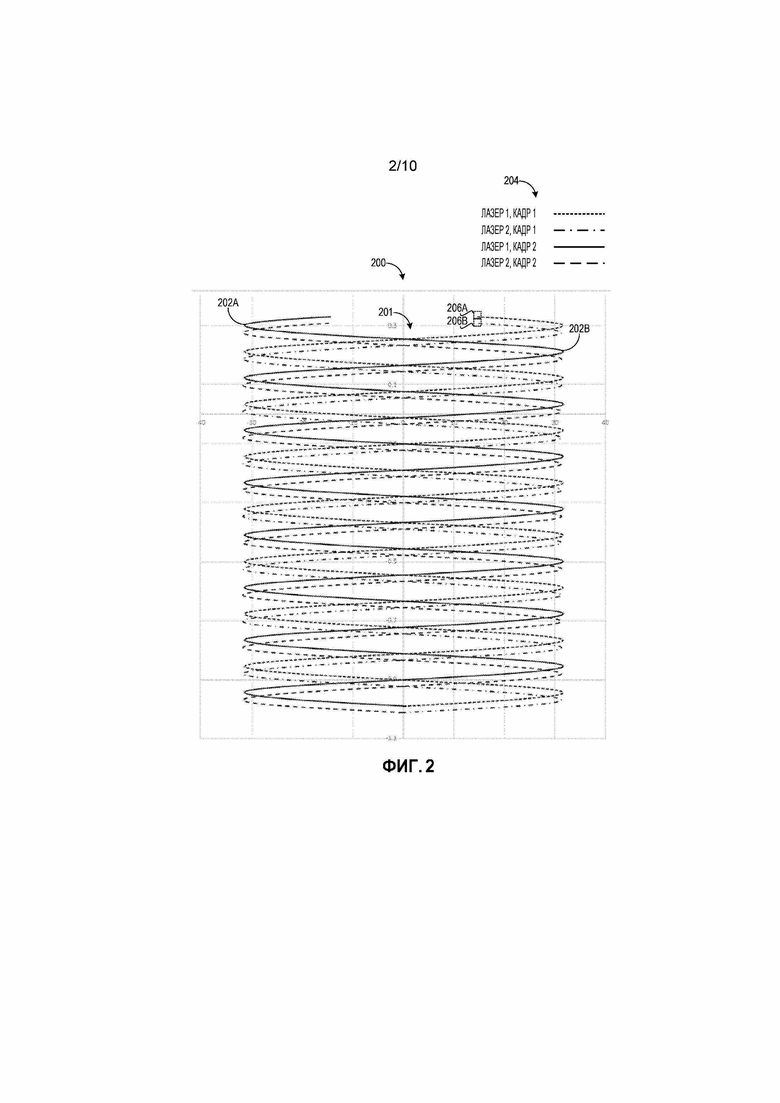
[0025] Фиг. 2 показывает примерную схему 200 следа лазера. Схема 200, например, иллюстрирует оптический вывод, который может формироваться посредством устройства 100 отображения по фиг. 1. Показаны четыре следа лазера, соответствующие выводу двух лазеров в двух различных кадрах, которые могут образовывать последовательную чересстрочную развертку. Каждый след соответствует свету, сформированному в пространстве для отображения в FOV 201, например, в выводе 108 по фиг. 1. Таким образом, часть следа лазера между последовательными поворотными точками, к примеру, поворотными точками 202A и 202B, может соответствовать горизонтальной строке воспринимаемых пикселов изображений, нарисованных посредством этого следа лазера. В некоторых примерах, поворотные точки могут находиться за пределами кадра с изображением.
[0026] Как указано в легенде 204, схема 200 показывает след первого лазера в первом кадре, след второго лазера в первом кадре, след первого лазера во втором кадре и след второго лазера во втором кадре. В первом кадре, следы первого и второго лазеров могут вертикально разделяться в пространстве для отображения на одну строку. Таким образом, следы первого и второго лазеров могут формировать свет в вертикально смежных пикселах изображений, которые выравниваются по вертикали. В качестве примера, фиг. 2 показывает вертикально смежные, вертикально совмещенные пикселы 206A и 206B изображений, которые могут формироваться посредством первого и второго лазеров в первом кадре.
[0027] Пример, показанный на фиг. 2, может соответствовать подходу, в котором горизонтальное зеркальное сканирование достигается с помощью актуатора, который гармонически колеблется с практически синусоидальным движением. Соответственно, следы лазера могут демонстрировать, по меньшей мере, частичное синусоидальное движение; как показано на фиг. 2, каждый след лазера сканирует горизонтальную строку пикселов изображений в полупериоде (например, в pi рад) синусоидальной волны таким образом, что два горизонтальных следа сканируются в полном периоде (например, в 2*pi рад) синусоидальной волны. Управление вертикальным зеркалом позволяет этим двум следам формировать два следа горизонтальных пикселов изображений.
[0028] В этом формулировании, чересстрочная развертка первого и второго кадров и других последовательных попеременных кадров может включать в себя применение смещения фазы между попеременными кадрами. В качестве примера, фиг. 2 показывает смещение фазы в pi радиан, применяемое к соответствующим синусоидальным волнам между первым и вторым кадрами. Посредством применения смещения фазы между попеременными кадрами таким образом, может достигаться более согласованное распределение света по всему FOV 201 и в силу этого изображения более высокого разрешения и согласованность яркости. С учетом частоты сканирования по высоким частотам, используемой посредством горизонтального зеркала, в этом примере, управление поведением при сканировании высокочастотного горизонтального зеркала может представлять трудности, поскольку регулирование частоты сканирования может прерывать гармонические колебания. В связи с этим, смещение фазы выполняется посредством управления более медленным вертикальным сканирующим зеркалом, чтобы начинать вертикальное сканирование раньше или позже в период горизонтального сканирования, в зависимости от желательного регулирования. Дополнительно, посредством выбора достаточно высокой переменной частоты между чересстрочными кадрами, может формироваться стабильное изображение без недопустимого мерцания, в котором свет из обоих кадров появляется одновременно для зрителей. В качестве примера, каждый кадр может отображаться на частоте вертикального сканирования в 120 Гц с изображением с построчной разверткой, сформированным посредством отображения первого и второго попеременных кадров на частоте вертикального сканирования в 60 Гц.
[0029] Хотя однострочное (например, пиксельное) разнесение может достигаться в определенных областях в FOV 201, менее желательное разнесение может приводить к другим областям в FOV. В примере, проиллюстрированном на фиг. 2, высокая степень перекрытия приводит к выводу из каждого лазера в первом кадре и идентичного соответствующего лазера во втором кадре в пределах горизонтальных углов около 0 градусов в FOV 201. Напротив, более желательное однострочное разнесение достигается к краям FOV 201, например, между горизонтальными углами в +/–15 и в +/–30 градусов. Нежелательная дисперсия в разрешении и яркости может получаться в результате такой дисперсии в межстрочном разнесении по всему FOV 201. Чтобы разрешать такую дисперсию, смещение фазы между попеременными кадрами может регулироваться посредством регулирования зеркала вертикального сканирования.
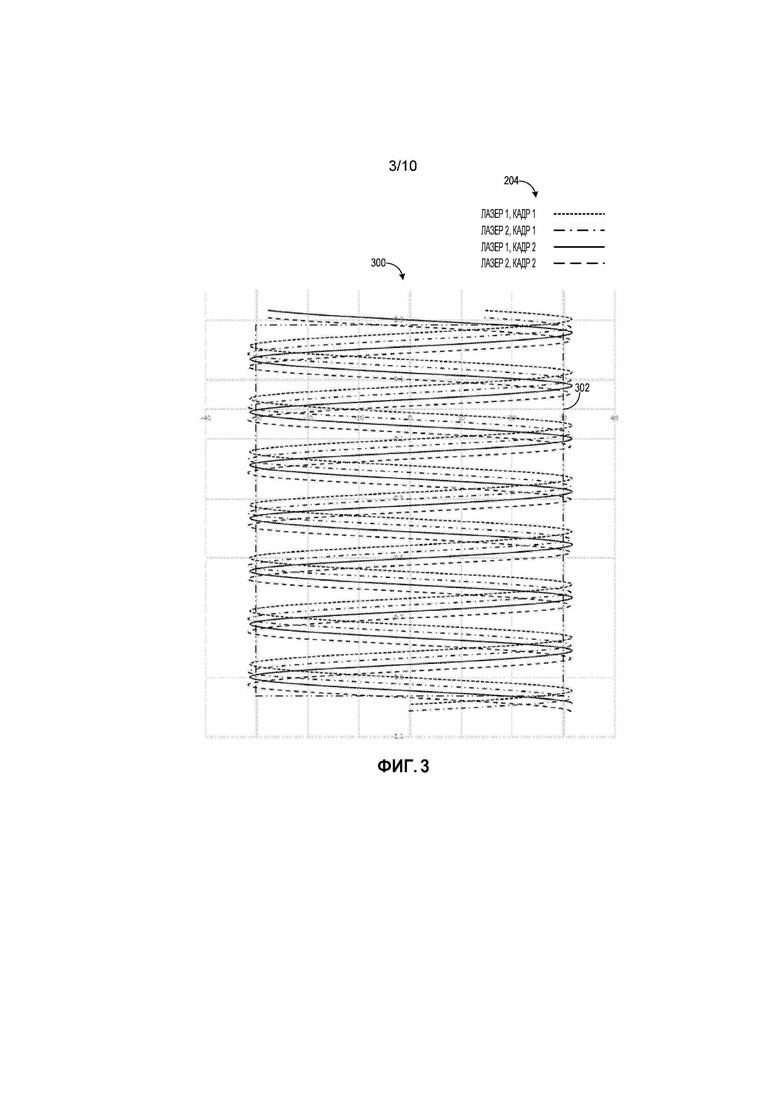
[0030] Фиг. 3 показывает примерную схему 300 следа лазера, сформированную со смещением фазы в pi/2 радиан между попеременными кадрами. В отличие от схемы 200 следа лазера по фиг. 2, сформированной со смещением фазы в pi радиан, фиг. 3 иллюстрирует то, как использование смещения в pi/2 радиан дает в результате однострочное разнесение в других областях в FOV 201, к примеру, в пределах горизонтальных углов около 0 градусов. Менее желательное разнесение и перекрытие выходных сигналов лазера приводит к горизонтальным углам к краям FOV 201, например, между углами в +/–15 и +/–30 градусов.
[0031] Схемы следа лазера, показанные на фиг. 2 и 3, иллюстрируют то, как регулирование смещения фазы между попеременными кадрами в чересстрочном выводе с лазерным сканированием формирует требуемое межстрочное разнесение и пиксельное разнесение изображений в различных областях FOV в пространстве для отображения. Этот подход может расширяться на использование любого подходящего набора смещений фазы, чтобы достигать желательного межстрочного разнесения в любой области FOV. Дополнительно, регулирование смещения фазы может динамически использоваться во время работы устройства отображения, чтобы достигать желательного межстрочного разнесения в областях, в которые направляется взгляд пользователя, например, между концом кадра и началом следующего в течение интервала вертикального гашения. Например, со ссылкой на фиг. 1, контроллер 114 может использовать вывод из датчика 112 слежения за движениями глаз, указывающий направление взгляда пользователя, чтобы определять область в FOV вывода 108, в которую направляется взгляд пользователя. Контроллер 114 затем может выбирать смещение фазы в ответ на это определение, чтобы достигать желательного межстрочного разнесения в области, в которую направляется взгляд пользователя, за счет этого оптимизируя отображаемый вывод, воспринимаемый пользователем в ходе работы устройства 100 отображения. Любой подходящий уровень детализации может использоваться в ходе динамического регулирования смещений фазы. В качестве примера, FOV может разделяться на квадранты с соответствующим смещением фазы, ассоциированным с каждым квадрантом, и использоваться для того, чтобы достигать желательного межстрочного разнесения в этом квадранте. Тем не менее, FOV может разделяться на любые подходящие числа областей с любой подходящей геометрией, которая может быть равной или неравной и регулярной или нерегулярной. В качестве другого примера, практически непрерывная функция может использоваться для того, чтобы соотносить точки взгляда в FOV со смещением фазы. Тестирование методом Монте–Карло, например, может выполняться, чтобы определять набор соотнесений между точками взгляда и смещениями фазы.
[0032] Следует понимать, что фиг. 2 и 3 предоставляются в качестве примеров и не имеет намерение быть ограниченным каким–либо образом. Схемы 200 и 300 следа лазера, например, могут представлять выходной сигнал лазера до обработки посредством одного или более оптических элементов, которые могут быть включены в устройство 100 отображения по фиг. 1. Дополнительно, любое подходящее целое число n лазеров может использоваться с разрешением по вертикали изображений, пропорциональным n, например, увеличение в числе n лазеров с 2 до 4 удваивает разрешение по вертикали. Еще дополнительно, может использоваться любая подходящая частота вертикального обновления, при которой увеличения частоты вертикального обновления уменьшают разрешение по вертикали, например, удвоение частоты вертикального обновления уменьшает разрешение по вертикали наполовину. В связи с этим, число n лазеров и частота вертикального обновления могут балансироваться, чтобы достигать требуемого отображаемого вывода. Еще дополнительно, поднабор схем 200 и 300 может выбираться в качестве FOV, в котором изображения предоставляются для зрителей. В качестве примера со ссылкой на фиг. 3, показано примерное FOV 302, которое опускает часть следов лазера в схеме 300. Опущенная часть может соответствовать областям, в которых выходной сигнал лазера является асимметричным, вертикально неправильно совмещенным (аналогично горизонтальным конечным частям схемы 300) или в других отношениях нежелательным. Опущенная часть может быть обозначена как избыточная область сканирования, в которой выходной сигнал лазера деактивируется (например, посредством прекращения подачи мощности в лазеры).
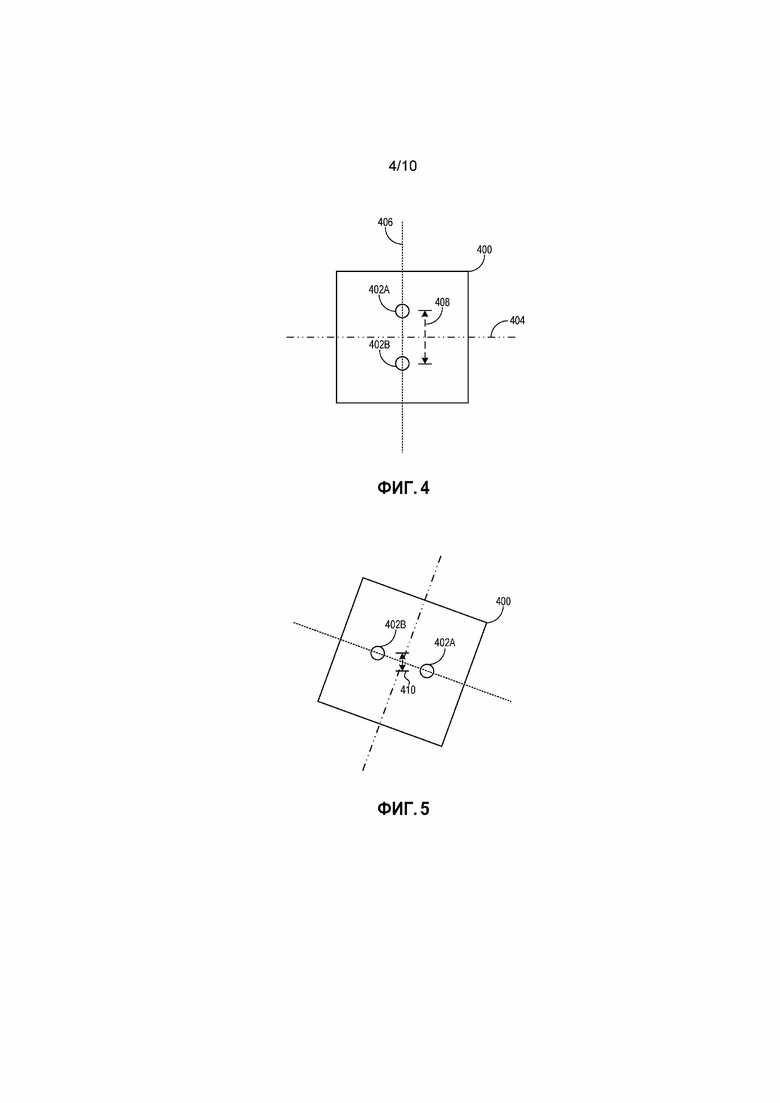
[0033] Различные лазерные конфигурации могут использоваться для формирования однострочных и других желательных межстрочных разнесений. В качестве одного примера, фиг. 4 показывает примерную лазерную головку 400, содержащую два твердотельных лазера 402A и 402B. Лазеры 402A и 402B могут размещаться, например, на лазерной головке 400 через подходящие литографические процессы. В ориентации, показанной на фиг. 4, лазерная головка 400 центрируется вокруг оси X 404 и оси Y 406, которые, соответственно, могут соответствовать горизонтальной и вертикальной осям, вдоль которых сканируются одно или более зеркал (например, первое и второе зеркала 104 и 106 по фиг. 1). Дополнительно, лазеры 402A и 402B совмещаются и разнесены вдоль вертикальной оси 406 на расстояние 408 вертикального разделения, измеренное вдоль вертикальной оси от центра лазера до центра лазера. Расстояние 408 разделения может выбираться так, чтобы достигать желательного режима работы лазера и исключать нежелательные проблемы, ассоциированные с чрезмерно узким разнесением между лазерами 402A и 402B, такие как тепловые перекрестные помехи. Расстояние 408 разделения дополнительно может приспосабливать размещение конструктивных и электрических элементов, требуемых для того, чтобы формировать лазерную головку 400 и управлять лазерами 402A и 402B, наряду с механическими допусками. В качестве одного примера, расстояние 408 разделения может быть практически равно 15 микронам.
[0034] Тем не менее, это и другие расстояния вертикального разделения могут проявляться в межстрочных разнесениях, больших одной строки в пространстве для отображения. Как подробнее описано ниже, конкретные частоты вертикального обновления и/или смещения фазы могут выбираться, чтобы компенсировать и достигать однострочного разнесения.
[0035] Однострочное разнесение может достигаться с помощью лазерной головки 400 посредством вращения лазерной головки относительно ориентации, показанной на фиг. 4, и предоставления лазерного света в зеркальную систему в повернутой ориентации. С этой целью, фиг. 5 показывает лазерную головку 400 в повернутой ориентации относительно ориентации, показанной на фиг. 4. Повернутая ориентация выбирается, чтобы достигать уменьшенного расстояния 410 вертикального разделения относительно расстояния 408 вертикального разделения неповернутой ориентации. Расстояние 410 вертикального разделения, например, может быть практически равно одному микрону. Таким образом, однострочное разнесение может достигаться в пространстве для отображения с помощью лазерной головки 400, которая может иметь 15 микронов или аналогичное расстояние вертикального разделения в неповернутой ориентации. Вследствие механических допусков, ошибка вращения может возникать при вращении лазерной головки 400, которая может проявляться в качестве ошибки межстрочного разнесения в пространстве для отображения. Для компенсации, частота вертикального обновления может регулироваться с известным механическим разнесением между лазерами 402A и 402B и характерной тепловой дисперсией лазерной головки 400. В качестве примера, межстрочное разнесение в пространстве для отображения, большем одной строки, может компенсироваться посредством увеличения частоты вертикального обновления за счет некоторого разрешения по вертикали, чтобы достигать однострочного разнесения. Схемы 200 и 300 следа лазера фиг. 2 и 3, например, могут формироваться посредством лазерной головки 400, размещаемой в повернутой ориентации.
[0036] Фиг. 6 показывает примерную схему 600 следа лазера, включающую в себя следы лазера из двух лазеров в двух попеременных кадрах, как указано посредством легенды 602. Схема 600 может представлять выходной сигнал лазера, сформированный посредством лазерной головки, ориентированной с вертикальным разделением между лазерами, большим разнесения, которое приводит к одной строке в пространстве для отображения, такого как лазерная головка 400 в ориентации, показанной на фиг. 4, с расстоянием 408 вертикального разделения между лазерами 402A и 402B. В этом примере, синусоидальный профиль, в иных случаях предполагаемый посредством следов лазера, искажается вследствие вертикального лазерного расстояния разделения, приводя к "лукообразной" форме следов лазера, возникающей в результате эффектов сканирующего зеркала. Дополнительно, характер искаженных синусоид отличается между лазерами: первый лазер демонстрирует большее нисходящее искривление во время горизонтального строчного сканирования, тогда как второй лазер демонстрирует большее восходящее искривление во время горизонтального строчного сканирования. Тем не менее, желательные однострочные и другие межстрочные разнесения в пространстве для отображения могут достигаться посредством регулирования частоты вертикального обновления, как описано выше. Для расстояния 408 вертикального разделения, например, частота вертикального обновления может варьироваться, чтобы регулировать межстрочное разнесение и/или разрешение при одновременном сохранении целого числа горизонтальных строк в изображении. Например, это может обеспечивать возможность осуществления сканирования быстрее в нефовеальных областях (например, в периферийном виде пользователя), чем в фовеальных областях (например, на линии взгляда пользователя), чтобы достигать фовеального отображения с использованием данных слежения за движениями глаз.
[0037] Смещение фазы между чересстрочными кадрами, сформированными посредством лазерной головки 400 с расстоянием 408 вертикального разделения, может регулироваться, чтобы формировать желательные межстрочные разнесения в определенных частях FOV 604, как описано выше. Фиг. 7 показывает примерную схему 700 следа лазера, получающуюся в результате изменения смещения фазы в pi радиан, используемого для формирования схемы 600 для смещения фазы в pi/2 радиан. В отличие от схемы 600, в которой нежелательное межстрочное разнесение и перекрытие выходных сигналов лазера возникает при горизонтальных углах рядом с 0 градусов, смещение фазы в pi/2 радиан, обеспечиваемое схемой 700, приводит к желательному межстрочному разнесению в горизонтальных углах рядом с 0 градусов. Как описано выше, вывод из датчика 112 слежения за движениями глаз по фиг. 1 может использоваться для динамической регулировки смещения фазы, чтобы достигать желательного межстрочного разнесения в ответ на взгляд пользователя.
[0038] В примерах, в которых сканирующая система отображения реализуется как HMD, движение головы пользователя может оказывать влияние на разрешение изображений. Например, вертикальное движение головы (или, если обобщить, движение головы вдоль направления сканирования по нижним частотам) может создавать наложение спектров между кадрами чересстрочного шаблона сканирования, приводя к тому, что строки шаблона сканирования выглядят "свернутыми" друг на друге. В таких случаях, пользователь может подвергаться уменьшению разрешения изображений вследствие движения головы вдоль направления сканирования по нижним частотам. Движение глаз аналогично может приводить к наложению спектров в некоторых случаях.
[0039] Чтобы помогать исключать такие визуальные эффекты, датчик движения может использоваться для того, чтобы считывать движение головы и/или движение глаз для регулирования частоты сканирования и/или смещения фазы на основе данных движения. Фиг. 8 показывает блок–схему последовательности операций, иллюстрирующую примерный способ 800 динамического регулирования одного или более рабочих параметров на основе движения пользователя. Способ 800 может реализовываться как сохраненные инструкции, выполняемые посредством логической подсистемы вычислительной системы, к примеру, системы с наголовным дисплеем.
[0040] На 802, способ 800 содержит управление сканирующей зеркальной системой с возможностью сканировать свет в чересстрочном шаблоне таким образом, чтобы формировать изображение. Это может включать в себя управление сканирующей зеркальной системой с возможностью сканировать свет из источника света в первом направлении на более высокой частоте и во втором направлении на более низкой частоте таким образом, чтобы формировать изображение, как указано на 804. Может использоваться любая подходящая сканирующая зеркальная система, в том числе, но не только, примеры, описанные в данном документе.
[0041] Способ 800 дополнительно включает в себя, на 806, прием данных движения из одного или более датчиков. Такие данные движения могут включать в себя данные из датчика движения головы, как указано на 808. Данные движения головы могут включать в себя любую подходящую информацию относительно движения головы пользователя, такую как информация скорости перемещения в пространстве и/или вращения и/или ускорения вдоль трех осей. Из этих данных, может определяться вектор скорости движения головы вдоль второго направления. Как подробнее описано ниже, данные движения также могут получаться из датчика слежения за движениями глаз, как указано на 810.
[0042] Если продолжать, способ 800 включает в себя, на 812, регулирование одного или более из частоты сканирования во втором направлении и смещения фазы между первым кадром и вторым кадром чересстрочного шаблона на основе данных движения, чтобы помогать уменьшать воспринимаемое наложение спектров в проецируемом изображении. В некоторых примерах, темп ускорения может определяться и использоваться для того, чтобы вычислять вероятную скорость движения головы во время отображения изображений, и вероятная скорость движения головы может использоваться для того, чтобы определять регулирование.
[0043] Изменения ускорения головы пользователя могут затрагивать наложение спектров в чересстрочном шаблоне изображения даже в случае, если регулирование определяется на основе определенного ускорения, например, в случаях, когда изменение ускорения в ходе отображения кадра имеет достаточную абсолютную величину, чтобы обеспечивать меньшую эффективность определенного регулирования во время этого кадра. В некоторых примерах, изменения ускорения могут прогнозироваться достаточно небольшими для всей длительности кадра (например, для интервала в 5–10 мс на основе длительности кадра на 8 мс), так что идентичное регулирование применяется в течение определенной длительности кадра, и все случаи, в которых ускорение превышает прогнозированный уровень, не компенсируются явно. В других примерах, ускорение в реальном времени может определяться, и один или более параметров могут регулироваться в ходе отображения кадра с изображением, чтобы изменять частоту сканирования в течение кадра.
[0044] Как упомянуто выше, наложение спектров также может возникать в результате движения глаз вдоль направления сканирования по нижним частотам. В связи с этим, в некоторых примерах, один или более рабочих параметров дополнительно или альтернативно могут регулироваться на основе данных движения глаз из системы слежения за взглядом. Таким образом, способ 800 может включать в себя, на 810, прием данных из датчика слежения за движениями глаз и, на основе этих данных, регулирование (на 814) одного или более из частоты сканирования во втором направлении и смещения фазы между кадрами чересстрочного шаблона.
[0045] Если учитываются как движение головы, так и движение глаз, смещение фазы между кадрами чересстрочного шаблона может регулироваться посредством отдельного определения смещения фазы для движения головы и движения глаз и затем суммирования определенных смещений фазы, как указано на 816. Дополнительно, если смещение определяется для фовеального отображения, смещение фовеального отображения также может суммироваться со смещением при движении головы и смещением при движении глаз, чтобы определять полное смещение фазы, которое следует применять.
[0046] В некоторых примерах, дисплей может быть выполнен с возможностью использовать отдельные сканирующие системы отображения для изображения для левого глаза и изображения для правого глаза. Например, система по фиг. 1 может модифицироваться таким образом, что она включает в себя отдельные источники света (например, отдельные лазеры) и первое и второе зеркала для каждого глаза, управляемые посредством общего контроллера. В таком примере, две монокулярные системы отображения могут перекрываться, чтобы формировать стереоскопический дисплей. В таком примере, разность фаз между двумя монокулярными системами отображения может управляемо смещаться таким образом, что аддитивный бинокулярный дисплей представляет собой суммирование двух сканирований монокулярных изображений. В качестве примера, один глаз может просматривать нечетные кадры, в то время как другой глаз просматривает четные кадры. В таком примере, с использованием достаточно высокой частоты кадров, зритель, просматривающий два изображения, должен сливать два изображения и видеть наложение нечетных и четных кадров одновременно. В таком примере, смещение фазы нечетных и четных кадров может регулироваться на основе данных движения, чтобы сохранять желательное межстрочное разнесение между сканированиями и уменьшать воспринимаемое наложение спектров, как описано выше.
[0047] Когда используются две независимых сканирующих системы отображения, может быть затруднительным достигать идентичной частоты сканирования в направлении сканирования по верхним частотам. Например, проблемы технологического допуска могут затруднять обеспечение достаточно согласованной (например, < разности в 100 Гц) резонансной частоты для обоих сканирующих зеркал по верхним частотам. Такие проблемы могут потенциально разрешаться посредством сортировки частей на основе резонансной частоты. Тем не менее, это может увеличивать затраты на изготовление, а также не разрешает возможные проблемы температуры и вариативности возбуждения, что также может приводить к неравным частотам сканирования по верхним частотам между двумя независимыми сканирующими системами. В качестве другого возможного решения, одно или оба сканирующих зеркала по верхним частотам могут принудительно работать за пределами своей резонансной частоты, с тем чтобы совпадать с частотой другого зеркала. Тем не менее, такое решение может приводить к значительно большей потребляемой мощности, чем работа зеркала на резонансной частоте, и может влиять на стабильность системы и поле зрения. Дополнительно, даже в случае, если резонансные частоты являются близкими (например, < 100 Гц) и достаточно стабильными, относительные фазы по–прежнему, возможно, должны регулироваться для каждого кадра вследствие изменений разности фаз, возникающих в результате (небольшой) разности в частотах сканирования по верхним частотам.
[0048] Чтобы исключать такие проблемы с рассогласованными частотами сканирования по верхним частотам, идентичное сканирующее зеркало по верхним частотам может использоваться с отдельными сканирующими зеркалами по меньшим частотам для каждого глаза. Пример такой конфигурации показан как сканирующая система 900 отображения на фиг. 9. Сканирующая система 900 отображения включает в себя соответствующий источник 902a, 902b света для левого глаза и для правого глаза. Каждый источник света направляет свет (например, лазерный свет) к идентичному сканирующему зеркалу 904 по верхним частотам. Сканирующая система 900 отображения дополнительно включает в себя соответствующие сканирующие зеркала 906a, 906b по нижним частотам для левого глаза и для правого глаза, чтобы сканировать свет на предмет изображения для каждого глаза к выводу 908a, 908b. Контроллер 910 управляет источниками 902a, 902b света, сканирующим зеркалом 904 по верхним частотам и каждым сканирующим зеркалом 906a, 906b по нижним частотам. Контроллер 910 также принимает ввод из датчика 912 движения и может принимать ввод из датчиков слежения за движениями глаз для каждого глаза, показанных, соответственно, на 914a, 914b. На основе данных из датчика 912 движения и/или датчиков 914a, 914b слежения за движениями глаз, контроллер 910 может регулировать смещение фазы между кадрами для первого дисплея и/или второго дисплея, что может помогать уменьшать воспринимаемое наложение спектров.
[0049] В качестве другого примера, сканирующая система отображения может использовать одномерную матрицу светоизлучателей со светоизлучателем для каждого пиксела вдоль первого направления и сканирующим зеркалом, чтобы сканировать свет из одномерной матрицы светоизлучателей вдоль второго направления. Изображение может проецироваться посредством отдельного управления светом, излучаемым каждым светоизлучателем в каждой строке или столбце пикселов в направлении сканирования. В этой системе, синхронизация по выборкам может смещаться для изображений для левого и правого глаза, чтобы уменьшать наложение спектров вследствие движения головы. Пример такой системы показан на фиг. 10, который иллюстрирует первый дисплей 1000a и второй дисплей 1000b, каждый из которых, соответственно, имеет одномерную лазерную матрицу 1002a, 1002b и сканирующее зеркало 1004a, 1004b, чтобы направлять сканированную строку одномерного изображения к выводу 1006a, 1006b. Контроллер 1008 управляет каждым дисплеем 1000a, 1000b. Контроллер также принимает ввод из датчика 1010 движения, а также может принимать ввод из датчиков слежения за движениями глаз для каждого глаза, показанных, соответственно, на 1012a, 1012b. На основе данных из датчика 1010 движения и/или датчиков 1012a, 1012b слежения за движениями глаз, контроллер 1008 может регулировать синхронизацию по выборкам изображений, отображаемых посредством первого дисплея 1000a и/или второго дисплея 1000b, чтобы уменьшать наложение спектров.
[0050] В некоторых вариантах осуществления, способы и процессы, описанные в данном документе, могут быть связаны с вычислительной системой одного или более вычислительных устройств. В частности, такие способы и процессы могут реализовываться как прикладная компьютерная программа или служба, интерфейс прикладного программирования (API), библиотека и/или другой компьютерный программный продукт.
[0051] Фиг. 11 схематично показывает неограничивающий вариант осуществления вычислительной системы 1100, которая может осуществлять один или более способов и процессов, описанных выше. Вычислительная система 1100 показана в упрощенной форме. Вычислительная система 1100 может принимать форму одного или более персональных компьютеров, серверных компьютеров, планшетных компьютеров, домашних мультимедийных компьютеров, сетевых вычислительных устройств, игровых устройств, мобильных вычислительных устройств, устройств мобильной связи (например, смартфона) и/или других вычислительных устройств.
[0052] Вычислительная система 1100 включает в себя логическую машину 1102 и машину 1104 хранения данных. Вычислительная система 1100 необязательно может включать в себя подсистему 1106 отображения, подсистему 1108 ввода, подсистему 1110 связи и/или другие компоненты, не показанные на фиг. 11.
[0053] Логическая машина 1102 включает в себя одно или более физических устройств, выполненных с возможностью выполнять инструкции. Например, логическая машина может быть выполнена с возможностью выполнять инструкции, которые составляют часть одного или более приложений, служб, программ, процедур, библиотек, объектов, компонентов, структур данных или других логических структур. Такие инструкции могут реализовываться для того, чтобы выполнять задачу, реализовывать тип данных, преобразовывать состояние одного или более компонентов, достигать технического эффекта или иным образом добиваться требуемого результата.
[0054] Логическая машина 120 может включать в себя один или более процессоров, выполненных с возможностью выполнять программные инструкции. Дополнительно или альтернативно, логическая машина может включать в себя одну или более аппаратных или микропрограммных логических машин, выполненных с возможностью выполнять аппаратные или микропрограммные инструкции. Процессоры логической машины могут быть одноядерными или многоядерными, и инструкции, выполняемые на них, могут быть сконфигурированы с возможностью последовательной, параллельной и/или распределенной обработки. Отдельные компоненты логической машины необязательно могут быть распределены между двумя или более отдельных устройств, которые могут быть расположены удаленно и/или сконфигурированы с возможностью координированной обработки. Аспекты логической машины могут виртуализироваться и выполняться посредством сетевых вычислительных устройств с удаленным доступом, сконфигурированных в облачной вычислительной конфигурации.
[0055] Машина 1104 хранения данных включает в себя одно или более физических устройств, выполненных с возможностью хранить инструкции, выполняемые посредством логической машины, чтобы реализовывать способы и процессы, описанные в данном документе. Когда такие способы и процессы реализуются, состояние машины 1104 хранения данных может преобразовываться (например, чтобы хранить другие данные).
[0056] Машина 1104 хранения данных может включать в себя съемные и/или встроенные устройства.
Машина 1104 хранения данных может включать в себя оптическое запоминающее устройство (например, CD, DVD, HD–DVD, Blu–Ray–диск и т.д.), полупроводниковое запоминающее устройство (например, RAM, EPROM, EEPROM и т.д.) и/или магнитное запоминающее устройство (например, накопитель на жестких дисках, накопитель на гибких дисках, накопитель на ленте, MRAM и т.д.), в числе других. Машина 1104 для хранения данных может включать в себя энергозависимые устройства, энергонезависимые устройства, динамические устройства, статические устройства, неперезаписываемые устройства, постоянные запоминающие устройства, оперативные запоминающие устройства, устройства с последовательным доступом, устройства с адресацией по местоположениям, устройства с файловой адресацией и/или ассоциативные устройства.
[0057] Следует принимать во внимание, что машина 1104 хранения данных включает в себя одно или более физических устройств. Тем не менее, аспекты инструкций, описанных в данном документе, альтернативно могут распространяться посредством среды связи (например, электромагнитного сигнала, оптического сигнала и т.д.), которая не хранится посредством физического устройства в течение конечной длительности.
[0058] Аспекты логической машины 1102 и машины 1104 хранения данных могут быть интегрированы в один или более аппаратных логических компонентов. Такие аппаратные логические компоненты могут включать в себя, например, программируемые пользователем вентильные матрицы (FPGA), программные и прикладные специализированные интегральные схемы (PASIC/ASIC), программные и прикладные специализированные микросхемы для массового производства (PSSP/ASSP), внутрикристальные системы (SOC) и комплексные программируемые логические устройства (CPLD).
[0059] Термины "модуль", "программа" и "механизм" могут использоваться для того, чтобы описывать аспект вычислительной системы 1100, реализованный с возможностью выполнять конкретную функцию. В некоторых случаях, модуль, программа или механизм может подвергаться созданию экземпляра через логическую машину 1102, выполняющую инструкции, хранимые посредством машины 1104 хранения данных. Следует понимать, что различные модули, программы и/или механизмы могут подвергаться созданию экземпляра из идентичного приложения, службы, кодового блока, объекта, библиотеки, процедуры, API, функции и т.д. Аналогично, идентичный модуль, программа и/или механизм могут подвергаться созданию экземпляра посредством различных вариантов применения, служб, кодовых блоков, объектов, процедур, API, функций и т.д. Термины "модуль", "программа" и "механизм" могут охватывать отдельные или группы исполняемых файлов, файлов данных, библиотек, драйверов, сценариев, записей в базе данных и т.д.
[0060] Следует принимать во внимание, что "служба", при использовании в данном документе, представляет собой прикладную программу, выполняемую в нескольких пользовательских сеансах. Служба может быть доступна для одного или более системных компонентов, программ и/или других служб. В некоторых реализациях, служба может выполняться на одном или более серверных вычислительных устройств.
[0061] Если включена, подсистема 1106 отображения может использоваться для того, чтобы представлять визуальное представление данных, хранимых посредством машины 1104 хранения данных. Это визуальное представление может принимать форму графического пользовательского интерфейса (GUI). Как описано в данном документе, способы и процессы изменяют данные, хранимые посредством машины хранения данных, и в силу этого преобразуют состояние машины хранения данных, состояние подсистемы 1106 отображения аналогично может преобразовываться таким образом, чтобы визуально представлять изменения базовых данных. Подсистема 1106 отображения может включать в себя одно или более устройств отображения с использованием фактически любого типа технологии. Такие устройства отображения могут быть комбинированы с логической машиной 1102 и/или машиной 1108 хранения данных в одном корпусе, либо такие устройства отображения могут представлять собой периферийные устройства отображения.
[0062] Если включена, подсистема 1108 ввода может содержать или взаимодействовать с одним или более устройств пользовательского ввода, к примеру, с клавиатурой, мышью, сенсорным экраном или игровым контроллером. В некоторых вариантах осуществления, подсистема ввода может содержать или взаимодействовать с выбранными компонентами естественного пользовательского ввода (NUI). Такие компоненты могут быть интегрированными или периферийными, и преобразование и/или обработка действий ввода может проводиться внутри или вне платы. Примерные NUI–компоненты могут включать в себя микрофон для распознавания речи и/или голоса; камеру для съемки в инфракрасном диапазоне, камеру для цветной съемки, стереоскопическую камеру и/или камеру с эффектом глубины для машинного зрения и/или распознавания жестов; устройство слежения за положением головы, устройство слежения за движениями глаз, акселерометр и/или гироскоп для обнаружения движения и/или распознавания намерений; а также компоненты считывания электрического поля для оценки мозговой активности.
[0063] Если включена, подсистема 1110 связи может быть выполнена с возможностью функционально соединяться с одним или более других вычислительных устройств. Подсистема 1110 связи может включать в себя устройства проводной и/или беспроводной связи, совместимые с одним или более различных протоколов связи. В качестве неограничивающих примеров, подсистема связи может быть выполнена с возможностью связи через беспроводную телефонную сеть либо проводную или беспроводную локальную или глобальную вычислительную сеть. В некоторых вариантах осуществления, подсистема связи может обеспечивать возможность вычислительной системе 1100 отправлять и/или принимать сообщения в и/или из других устройств через сеть, к примеру, через Интернет.
[0064] Другой пример предоставляет сканирующую систему с наголовным дисплеем, содержащую источник света, датчик движения, сканирующую зеркальную систему, выполненную с возможностью сканировать свет из источника света, по меньшей мере, вдоль одной размерности, чтобы формировать изображение, и контроллер, выполненный с возможностью управлять сканирующей зеркальной системой с возможностью сканировать свет, чтобы формировать изображение, принимать данные движения головы из датчика движения и регулировать одно или более из частоты сканирования и смещения фазы между первым кадром и вторым кадром изображения на основе данных движения головы. В таком примере, сканирующая зеркальная система дополнительно или альтернативно может содержать первое зеркало, выполненное с возможностью сканировать свет в первом направлении, и второе зеркало, выполненное с возможностью сканировать свет во втором направлении. В таком примере, контроллер дополнительно или альтернативно может быть выполнен с возможностью регулировать смещение фазы между первым кадром и вторым кадром посредством регулирования времени, в которое сканирующая зеркальная система инициирует сканирование света во втором направлении относительно сканирования света в первом направлении. В таком примере, контроллер дополнительно или альтернативно может быть выполнен с возможностью регулировать смещение фазы между первым кадром и вторым кадром на основе желательного межстрочного разнесения в области в изображении. В таком примере, область может представлять собой одну из множества областей в изображении, и контроллер дополнительно или альтернативно может быть выполнен с возможностью ассоциировать соответствующее смещение фазы с каждой из множества областей. В таком примере, сканирующая система с наголовным дисплеем дополнительно может содержать датчик слежения за движениями глаз, выполненный с возможностью обнаруживать направление взгляда пользователя, и контроллер альтернативно или дополнительно может быть дополнительно выполнен с возможностью соотносить направление взгляда с областью в изображении и регулировать одно или более из частоты сканирования и смещения фазы на основе этой области в изображении. В таком примере, контроллер альтернативно или дополнительно может быть выполнен с возможностью регулировать смещение фазы первым способом на основе соотнесения направления взгляда с первую областью в изображении и регулировать смещение фазы вторым способом на основе соотнесения направления взгляда со вторую областью в изображении. В таком примере, область может представлять собой фовеальную область изображения, изображение может содержать нефовеальную область, и контроллер альтернативно или дополнительно может быть выполнен с возможностью увеличивать частоту сканирования в нефовеальной области и снижать частоту сканирования в фовеальной области. В таком примере, смещение фазы между первым кадром и вторым кадром может содержать несколько регулирований смещения фазы, и контроллер альтернативно или дополнительно может быть выполнен с возможностью определять первое регулирование смещения фазы на основе области в изображении, определять второе регулирование смещения фазы на основе данных движения головы и регулировать смещение фазы между первым кадром и вторым кадром на основе суммы определенного первого регулирования смещения фазы и определенного второго регулирования смещения фазы. В таком примере, источник света альтернативно или дополнительно может содержать источник лазерного света, содержащий два или более лазеров со смещением частоты, и источник лазерного света может быть выполнен с возможностью выводить свет нескольких цветов. В таком примере, сканирующая система с наголовным дисплеем может содержать датчик слежения за движениями глаз, выполненный с возможностью обнаруживать перемещение глаз, и контроллер альтернативно или дополнительно может быть выполнен с возможностью преобразовывать перемещение глаз и регулировать смещение фазы между первым кадром и вторым кадром на основе перемещения глаз. В таком примере, сканирующая зеркальная система альтернативно или дополнительно может быть выполнена с возможностью сканировать горизонтальную строку изображения в полупериоде микроэлектромеханического актуатора, который возбуждает сканирующую зеркальную систему. В таком примере, источник света альтернативно или дополнительно может содержать одномерную матрицу светоизлучателей. В таком примере, сканирующая зеркальная система альтернативно или дополнительно может содержать идентичное сканирующее зеркало по верхним частотам и отдельные сканирующие зеркала по нижним частотам для левого глаза и для правого глаза для соответствующего сканирования в направлении сканирования по верхним частотам и направлении сканирования по нижним частотам.
[0065] Другой пример предоставляет способ отображения изображения, содержащий направление света из источника света к сканирующей зеркальной системе, сканирование света из источника света в первом направлении на более высокой частоте и во втором направлении на более низкой частоте, чтобы за счет этого сканировать свет в чересстрочном шаблоне и формировать изображение, прием данных движения головы из датчика движения, и, по меньшей мере, на основе данных движения головы, регулирование одного или более из частоты сканирования во втором направлении и смещения фазы между первым кадром и вторым кадром чересстрочного шаблона. В таком примере, способ альтернативно или дополнительно может содержать соотнесение направления взгляда, определенного через датчик слежения за движениями глаз, с областью в изображении и регулирование одного или более из частоты сканирования во втором направлении и смещения фазы на основе области в изображении. В таком примере, способ альтернативно или дополнительно может содержать соотнесение перемещения глаз по изображению через датчик слежения за движениями глаз, и на основе перемещения глаз, регулирование одного или более из частоты сканирования во втором направлении и смещения фазы между первым кадром и вторым кадром чересстрочного шаблона. В таком примере, сканирование света из источника света альтернативно или дополнительно может содержать сканирование света для того, чтобы формировать изображение с разрешением между 1440p и 2160p.
[0066] Другой пример предоставляет сканирующую систему с наголовным дисплеем, содержащую источник света, датчик движения, сканирующую зеркальную систему, выполненную с возможностью сканировать свет из источника света в первом направлении на более высокой частоте и во втором направлении на более низкой частоте таким образом, чтобы формировать изображение, датчик слежения за движениями глаз и контроллер, выполненный с возможностью управлять сканирующей зеркальной системой с возможностью сканировать свет в чересстрочном шаблоне таким образом, чтобы формировать изображение, принимать данные движения головы из датчика движения, принимать данные из датчика слежения за движениями глаз и регулировать одно или более из частоты сканирования во втором направлении и смещения фазы между первым кадром и вторым кадром чересстрочного шаблона, по меньшей мере, на основе данных движения головы и данных, принимаемых из датчика слежения за движениями глаз. В таком примере, контроллер альтернативно или дополнительно может быть выполнен с возможностью принимать данные из датчика слежения за движениями глаз посредством приема индикатора относительно одного или более из направления взгляда и перемещения глаз, при этом контроллер альтернативно или дополнительно может быть выполнен с возможностью определять первое регулирование смещения фазы на основе одного или более из направления взгляда и перемещения глаз, определять второе регулирование смещения фазы на основе данных движения головы и регулировать смещение фазы между первым кадром и вторым кадром чересстрочного шаблона на основе суммы определенного первого регулирования смещения фазы и определенного второго регулирования смещения фазы.
[0067] Следует понимать, что конфигурации и/или подходы, описанные в данном документе, являются примерными по своему характеру, и что эти конкретные варианты осуществления или примеры не должны рассматриваться в ограничивающем смысле, поскольку возможно множество изменений. Конкретные процедуры или способы, описанные в данном документе, могут представлять одну или более из любого числа стратегий обработки. В связи с этим, различные проиллюстрированные и/или описанные действия могут выполняться в проиллюстрированной и/или описанной последовательности, в других последовательностях, параллельно либо опускаться. Аналогично, порядок вышеописанных процессов может изменяться.
[0068] Предмет настоящего раскрытия включает в себя все новые и неочевидные комбинации и субкомбинации различных процессов, систем и конфигураций, а также других признаков, функций, действий и/или свойств, раскрытых в данном документе, как и все без исключения эквиваленты означенного.




Изобретение относится к сканирующим системам с наголовным дисплеем для отображения изображений. Сканирующая система отображения, содержащая: источник лазерного света, содержащий два или более разнесенных лазеров; сканирующую зеркальную систему, выполненную с возможностью сканировать свет из источника лазерного света в первом направлении на более высокой частоте и во втором направлении на более низкой частоте, чтобы формировать изображение; датчик слежения за движениями глаз, выполненный с возможностью обнаруживать направление взгляда пользователя; и контроллер, выполненный с возможностью: соотносить направление взгляда с областью в изображении, управлять сканирующей зеркальной системой для сканирования лазерного света в чересстрочном шаблоне, чтобы формировать изображение, и регулировать одно или более из частоты сканирования во втором направлении и смещения фазы между первым кадром и вторым кадром изображения на основе, по меньшей мере, упомянутой области в изображении. Технический результат – повышение точности сканирования. 3 н. и 15 з.п. ф-лы, 11 ил.
1. Сканирующая система отображения, содержащая:
источник лазерного света, содержащий два или более разнесенных лазеров;
сканирующую зеркальную систему, выполненную с возможностью сканировать свет из источника лазерного света в первом направлении на более высокой частоте и во втором направлении на более низкой частоте, чтобы формировать изображение;
датчик слежения за движениями глаз, выполненный с возможностью обнаруживать направление взгляда пользователя; и
контроллер, выполненный с возможностью:
соотносить направление взгляда с областью в изображении,
управлять сканирующей зеркальной системой для сканирования лазерного света в чересстрочном шаблоне, чтобы формировать изображение, и
регулировать одно или более из частоты сканирования во втором направлении и смещения фазы между первым кадром и вторым кадром изображения на основе, по меньшей мере, упомянутой области в изображении.
2. Сканирующая система отображения по п.1, в которой сканирующая зеркальная система содержит первое зеркало, выполненное с возможностью сканировать лазерный свет в первом направлении, и второе зеркало, выполненное с возможностью сканировать лазерный свет во втором направлении.
3. Сканирующая система отображения по п.2, в которой контроллер выполнен с возможностью регулировать смещение фазы между первым кадром и вторым кадром посредством регулирования времени, в которое сканирующая зеркальная система инициирует сканирование лазерного света во втором направлении относительно сканирования лазерного света в первом направлении.
4. Сканирующая система отображения по п.1, в которой контроллер выполнен с возможностью регулировать смещение фазы между первым кадром и вторым кадром на основе желательного межстрочного разнесения в упомянутой области в изображении.
5. Сканирующая система отображения по п.4, при этом упомянутая область представляет собой одну из множества областей в изображении, причем контроллер выполнен с возможностью связывать соответствующее смещение фазы с каждой из этого множества областей.
6. Сканирующая система отображения по п.1, в которой контроллер дополнительно выполнен с возможностью регулировать смещение фазы первым способом на основе соотнесения направления взгляда с первой областью в изображении и регулировать смещение фазы вторым способом на основе соотнесения направления взгляда со второй областью в изображении.
7. Сканирующая система отображения по п.1, при этом упомянутая область представляет собой фовеальную область изображения, причем изображение содержит нефовеальную область, при этом контроллер дополнительно выполнен с возможностью увеличивать частоту сканирования во втором направлении в нефовеальной области и снижать частоту сканирования во втором направлении в фовеальной области.
8. Сканирующая система отображения по п.1, в которой два или более разнесенных лазеров имеют ориентацию, соответствующую вертикальному смещению относительно центра, лежащего на втором направлении.
9. Сканирующая система отображения по п.1, в которой источник лазерного света выполнен с возможностью выдавать свет нескольких цветов.
10. Сканирующая система отображения по п.8, в которой контроллер дополнительно выполнен с возможностью компенсации ошибки межстрочного разнесения в вертикально смещенной ориентации посредством регулирования частоты сканирования во втором направлении.
11. Сканирующая система отображения по п.1, в которой сканирующая зеркальная система выполнена с возможностью сканирования горизонтальной строки изображения в полупериоде микроэлектромеханического актуатора, который приводит в действие сканирующую зеркальную систему.
12. Сканирующая система отображения по п.1, при этом сканирующая система отображения выполнена с возможностью сканирования в первом направлении на частоте от 27 кГц до 35 кГц.
13. Сканирующая система отображения по п.1, в которой контроллер выполнен с возможностью управлять зеркальной системой для формирования изображения с разрешением между 1440p и 2160p.
14. Способ отображения изображения, содержащий этапы, на которых:
направляют свет из двух или более разнесенных лазеров на сканирующую зеркальную систему;
сканируют свет из двух или более разнесенных лазеров в первом направлении на более высокой частоте и во втором направлении на более низкой частоте, чтобы за счет этого сканировать лазерный свет в чересстрочном шаблоне и формировать изображение;
соотносят направление взгляда, определенное посредством датчика слежения за движениями глаз, с областью в изображении; и
регулируют одно или более из частоты сканирования во втором направлении и смещения фазы на основе этой области в изображении.
15. Способ по п.14, в котором упомянутое сканирование света из двух или более разнесенных лазеров в первом направлении содержит сканирование света в первом направлении на частоте от 27 кГц до 35 кГц.
16. Способ по п.14, в котором упомянутое сканирование света из двух или более разнесенных лазеров содержит сканирование света для формирования изображения с разрешением между 1440p и 2160p.
17. Сканирующая система отображения, содержащая:
источник лазерного света, содержащий два или более разнесенных лазеров;
сканирующую зеркальную систему, выполненную с возможностью сканировать свет из источника лазерного света в первом направлении на более высокой частоте и во втором направлении на более низкой частоте, чтобы формировать изображение;
датчик слежения за движениями глаз; и
контроллер, выполненный с возможностью:
определять направление взгляда посредством данных с датчика слежения за движениями глаз,
управлять сканирующей зеркальной системой для сканирования лазерного света в чересстрочном шаблоне, чтобы формировать изображение, и
регулировать одно или более из частоты сканирования во втором направлении и смещения фазы между первым кадром и вторым кадром чересстрочного изображения на основе, по меньшей мере, направления взгляда.
18. Сканирующая система отображения по п.17, при этом система отображения содержит сканирующую систему с наголовным дисплеем.
| US 2011234898 A1, 29.09.2011 | |||
| US 2017019661 A1, 19.01.2017 | |||
| US 2016274365 A1, 22.09.2016 | |||
| US 2014361977 A1, 11.12.2014 | |||
| US 2016366377 A1, 15.12.2016 | |||
| RU 2014134394 A, 20.03.2016. |

