Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления и к устройству управления для электротранспортного средства.
Уровень техники
[0002] Традиционно известно устройство управления рекуперативным тормозом для электромобилей, содержащее средство задания, допускающее любое данное задание рекуперативной тормозной силы электромотора и рекуперацию электромотора посредством рекуперативной тормозной силы, заданной посредством средства задания (см. JPH08-79907A).
Сущность изобретения
[0003] Тем не менее, если рекуперативная тормозная сила, заданная посредством средства задания, является большой, технология в JPH08-79907A имеет следующую проблему. Вибрация (продольная вибрация) в продольном направлении кузова транспортного средства может формироваться, когда электротранспортное средство замедляется посредством заданной рекуперативной тормозной силы, и скорость становится равной 0.
[0004] Для этой проблемы, авторы настоящего изобретения изучают обеспечение плавного замедления без вибрации при ускорении непосредственно перед остановкой транспортного средства и поддержание состояния остановки транспортного средства, независимо от ровной дороги, дороги, идущей в подъем, и дороги, идущей под спуск, посредством регулирования крутящего момента электромотора с уменьшением частоты вращения электромотора, чтобы иметь средство управления крутящим моментом, которое инструктирует крутящему моменту электромотора сходиться к оцененному значению возмущающего крутящего момента, которое представляет собой почти сопротивление вследствие градиента.
[0005] Тем не менее, в ситуации, в которой крутящий момент электромотора продолжает поддерживать состояние остановки транспортного средства в состоянии, в котором возмущающий крутящий момент действует на транспортное средство, в частности, например, на дороге с уклоном, необходимо продолжать подавать ток в электромотор, в силу этого снижая эффективность потребления электричества.
[0006] Цель настоящего изобретения заключается в том, чтобы предоставлять технологию, которая обеспечивает плавное замедление без вибрации при ускорении непосредственно перед остановкой транспортного средства и уменьшает величину потребления тока электромотора в ситуации, в которой состояние остановки транспортного средства поддерживается, чтобы сокращать затраты на электричество.
[0007] Согласно одному варианту осуществления настоящего изобретения, устройство управления для электротранспортного средства в первом варианте осуществления, в электротранспортном средстве, включающем в себя электромотор, который функционирует в качестве источника приведения в движение и предоставляет рекуперативную тормозную силу в транспортное средство, и фрикционные тормоза, которые предоставляют фрикционную тормозную силу в транспортное средство, определяет частоту вращения электромотора, пропорциональную скорости движения этого электротранспортного средства, оценивает возмущающий крутящий момент, который действует на электромотор, и выполняет управление таким образом, что значение команды управления крутящим моментом электромотора сходится к оцененному значению возмущающего крутящего момента по мере того, как частота вращения электромотора уменьшается. После этого, когда частота вращения электромотора становится почти равной 0, устройство управления выполняет управление таким образом, что значение команды управления величиной фрикционного торможения относительно фрикционных тормозов сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктирует значению команды управления крутящим моментом электромотора сходиться почти к 0.
[0008] Далее подробно описываются варианты осуществления настоящего изобретения с прилагаемыми чертежами.
Краткое описание чертежей
[0009] Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электромобиля с устройством управления для электротранспортного средства согласно первому варианту осуществления.
Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций процессов для управления током электромотора, выполняемого посредством контроллера электромотора.
Фиг. 3 является схемой, иллюстрирующей пример таблицы позиций акселератора (степеней открытия акселератора) и крутящих моментов.
Фиг. 4 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства.
Фиг. 5 является блок-схемой для осуществления процесса управления остановкой.
Фиг. 6 является схемой, описывающей способ для вычисления крутящего F/B-момента по частоте вращения электромотора на основе частоты вращения электромотора.
Фиг. 7 является блок-схемой, описывающей способ для вычисления оцененного значения возмущающего крутящего момента на основе частоты вращения электромотора и значения третьего целевого крутящего момента.
Фиг. 8 является блок-схемой последовательности операций способа, показывающей последовательность операций процесса переключения согласно первому варианту осуществления.
Фиг. 9 является схемой, описывающей способ для выполнения процесса фильтрации с учетом скорости отклика величины фрикционного торможения, для значения команды управления крутящим моментом электромотора.
Фиг. 10 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения согласно первому варианту осуществления.
Фиг. 11 является схемой, описывающей результат управления посредством устройства управления для электротранспортного средства согласно первому варианту осуществления.
Фиг. 12 является схемой, описывающей результат управления посредством устройства управления для электротранспортного средства согласно первому варианту осуществления.
Фиг. 13 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения согласно второму варианту осуществления.
Фиг. 14 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения согласно третьему варианту осуществления.
Фиг. 15 является блок-схемой последовательности операций способа, показывающей последовательность операций вычисления периода остановки транспортного средства.
Фиг. 16 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения согласно четвертому варианту осуществления.
Подробное описание вариантов осуществления
[0010] Далее описывается пример, который применяет устройство управления для транспортного средства согласно настоящему изобретению к электромобилю.
[0011] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электромобиля с устройством управления для транспортного средства согласно одному варианту осуществления. В частности, устройство управления для транспортного средства согласно настоящему варианту осуществления может применяться к транспортному средству, допускающему управление ускорением/замедлением и остановкой транспортного средства только посредством операции нажатия педали акселератора. В этом транспортном средстве, водитель нажимает педаль акселератора в ходе ускорения и уменьшает или обнуляет величину нажатия для нажатой педали акселератора в ходе замедления или в ходе остановки. Следует отметить, что транспортное средство стремится к остановленному состоянию в то время, когда водитель нажимает педаль акселератора, чтобы не допускать отката назад транспортного средства на дорогах, идущих в подъем, в некоторых случаях.
[0012] Контроллер 2 электромотора имеет сигналы, указывающие состояния транспортного средства, такие как скорость V транспортного средства, позиция AP акселератора, фаза α вращения электромотора 4 (электромотора трехфазного переменного тока) и токи iu, iv и iw электромотора 4, которые вводятся в контроллер 2 электромотора в форме цифровых сигналов. Контроллер 2 электромотора формирует PWM-сигналы для управления электромотором 4 на основе входных сигналов. Контроллер 2 электромотора формирует сигнал приведения в действие инвертора 3 посредством сформированного PWM-сигнала. Контроллер 2 электромотора дополнительно формирует значение команды управления величиной фрикционного торможения посредством способа, описанного ниже. Следует отметить, что контроллер 2 электромотора имеет функции в качестве модуля оценки возмущающего крутящего момента, контроллера величины фрикционного торможения и контроллера крутящего момента электромотора.
[0013] Инвертор 3 включает и выключает два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT или MOSFET), включенных для каждой фазы, чтобы преобразовывать постоянный ток, поданный из аккумулятора 1, в переменный ток, за счет этого обеспечивая протекание требуемого тока в электромотор 4.
[0014] Электромотор 4 формирует движущую силу посредством переменного тока, подаваемого из инвертора 3, и передает движущую силу на правое и левое ведущие колеса 9a и 9b через редуктор 5 и ведущий вал 8. Дополнительно, при вращении согласно вращению ведущих колес 9a и 9b во время движения транспортного средства, электромотор 4 формирует рекуперативную движущую силу, в силу этого собирая кинетическую энергию транспортного средства в качестве электрической мощности. В этом случае, инвертор 3 преобразует переменный ток, сформированный во время работы в рекуперативном режиме электромотора 4, в постоянный ток и подает постоянный ток в аккумулятор 1.
[0015] Датчик 7 тока имеет функцию в качестве детектора параметров скорости/частоты вращения, чтобы определять трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4. Следует отметить, что поскольку сумма трехфазных переменных токов iu, iv и iw равна 0, токи двух произвольных фаз могут определяться, и ток оставшейся одной фазы может получаться посредством вычисления.
[0016] Датчик 6 вращения, например, представляет собой круговой датчик позиции или датчик позиции и определяет фазу α вращения электромотора 4.
[0017] Датчик 10 давления жидкости определяет давление тормозной жидкости фрикционных тормозов 12.
[0018] Датчик температуры электромотора 12 определяет температуру электромотора 4.
[0019] Тормозной контроллер 11 имеет функцию в качестве контроллера величины фрикционного торможения, чтобы формировать давление тормозной жидкости согласно значению команды управления величиной фрикционного торможения, которое формируется посредством контроллера 2 электромотора. Тормозной контроллер 11 также выполняет управление с обратной связью таким образом, что давление тормозной жидкости, определенное посредством датчика 10 давления жидкости, придерживается значения, определенного согласно значению команды управления величиной фрикционного торможения.
[0020] Фрикционные тормоза 12 функционируют в качестве узлов фрикционного торможения. В частности, фрикционные тормоза 12 располагаются в правом и левом ведущих колесах 9a и 9b. Фрикционный тормоз 12 прижимает тормозную колодку к тормозному ротору согласно давлению тормозной жидкости, чтобы формировать тормозную силу для транспортного средства.
[0021] Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций процессов для управления током электромотора, выполняемого посредством контроллера 2 электромотора.
[0022] На этапе S201, сигналы, указывающие состояния транспортного средства, вводятся в контроллер 2 электромотора. Здесь, вводятся скорость V транспортного средства (км/ч), позиция θ акселератора (%), фаза α вращения (рад) электромотора 4, частота Nm вращения (об/мин) электромотора 4, трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4, значение Vdc постоянного напряжения (В) между аккумулятором 1 и инвертором 3, потребление мощности (в дальнейшем называемое "потреблением мощности электромотора") электромотора 4 и давление тормозной жидкости.
[0023] Скорость V транспортного средства (км/ч) получается посредством датчика скорости транспортного средства или через связь из другого контроллера (не проиллюстрирован). Альтернативно, скорость v транспортного средства (м/с) получается посредством умножения механической угловой скорости ωm вращения на динамический радиус r шины и деления произведения на передаточное отношение главной шестерни, и после этого полученное значение умножается на 3600/1000 для преобразования единиц измерения, за счет этого получая скорость V транспортного средства (км/ч).
[0024] Позиция θ акселератора (%) (рабочая величина нажатия педали акселератора) получается из датчика позиции акселератора (не проиллюстрирован) или через связь из другого контроллера, такого как контроллер транспортного средства (не проиллюстрирован).
[0025] Фаза α вращения (рад) электромотора 4 получается из датчика 6 вращения. Частота Nm вращения (об/мин) электромотора 4 получается посредством деления угловой скорости ω вращения (электрического угла) на номер p полюсной пары электромотора 4, чтобы получать частоту ωm вращения электромотора (рад/с), которая представляет собой механическую угловую скорость электромотора 4, и умножения полученной частоты ωm вращения электромотора на 60/(2π). Угловая скорость ωm вращения получается посредством дифференцирования фазы α вращения.
[0026] Токи iu, iv и iw(а), протекающие в электромоторе 4, получаются из датчика 7 тока.
[0027] Значение Vdc постоянного напряжения (В) получается из датчика напряжения (не проиллюстрирован), предоставленного в линии электропитания постоянного тока между аккумулятором 1 и инвертором 3, или значения напряжения питания, передаваемого из контроллера аккумулятора (не проиллюстрирован).
[0028] Датчик 10 давления жидкости определяет давление тормозной жидкости.
[0029] Потребление мощности электромотора P (W) получается из P=R x (iu^2+iv^2+iw^2) на основе токов iu, iv и iw (А), протекающих в электромоторе 4 и сопротивления катушки R [Ом] обмоточного провода (не проиллюстрирован), намотанного вокруг статора электромотора 4.
[0030] На этапе S202, контроллер 2 электромотора задает значение Tm1* первого целевого крутящего момента. В частности, значение Tm1* первого целевого крутящего момента задается на основе позиции AP акселератора, вводимой на этапе S201, и частоты ωm вращения электромотора посредством обращения к таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3. Следует отметить, что таблица позиций акселератора и крутящих моментов не ограничена таблицей, проиллюстрированной на фиг. 3.
[0031] На этапе S203, контроллер 2 электромотора выполняет процесс управления остановкой, чтобы выполнять такое управление, чтобы останавливать электротранспортное средство. В частности, определяется то, находится или нет электротранспортное средство в момент времени непосредственно перед остановкой транспортного средства. Значение Tm1* первого целевого крутящего момента, вычисленное на этапе S202, задается в качестве значения Tm3* третьего целевого крутящего момента до того, как электротранспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, и значение Tm2* второго целевого крутящего момента, которое сходится к оцененному значению Td возмущающего крутящего момента, описанному ниже, с уменьшением частоты вращения электромотора задается в качестве значения Tm3* третьего целевого крутящего момента после того, как электротранспортное средство находится в момент времени непосредственно перед остановкой транспортного средства. Это значение Tm2* второго целевого крутящего момента является положительным крутящим моментом на дороге, идущей в подъем, отрицательным крутящим моментом на дороге, идущей под спуск, и почти нулевым на ровной дороге. Это позволяет поддерживать состояние остановки транспортного средства независимо от градиента поверхности дороги. В состоянии остановки транспортного средства, значение Tm3* третьего целевого крутящего момента совпадает с оцененным значением Td возмущающего крутящего момента (Tm3*=Td). Ниже описываются подробности процесса управления остановкой.
[0032] На этапе S204, контроллер 2 электромотора выполняет процесс переключения, который представляет собой отличительный процесс в настоящем изобретении. В процессе переключения подтверждается флаг переключения. Когда флаг переключения равен 1, выполняется процесс, который переключает средство, которое поддерживает состояние остановки транспортного средства, с крутящего момента электромотора для электромотора 4 на величину фрикционного торможения фрикционных тормозов 12. С другой стороны, когда флаг переключения равен 0, состояние остановки транспортного средства посредством крутящего момента электромотора поддерживается.
[0033] Как описано выше, после того как транспортное средств останавливается в процессе управления остановкой на этапе S203, чтобы поддерживать состояние остановки транспортного средства для транспортного средства посредством крутящего момента электромотора, необходимо продолжать поддерживать состояние, в котором этот крутящий момент электромотора совпадает с оцененным значением Td возмущающего крутящего момента. Следовательно, когда оцененное значение Td возмущающего крутящего момента не равно 0, например, когда позиция остановки транспортного средства для транспортного средства представляет собой дорогу с уклоном, необходимо продолжать подавать ток в электромотор во время поддержания остановки транспортного средства, в силу этого снижая эффективность потребления электричества. Процесс переключения на этапе S204 имеет объект, который переключает средство, которое поддерживает состояние остановки транспортного средства, с электромотора 4 на фрикционные тормоза 12, чтобы уменьшать ток, потребляемый посредством электромотора 4, чтобы поддерживать остановку транспортного средства, за счет этого сокращая затраты на электричество транспортного средства.
[0034] В частности, контроллер 2 электромотора инструктирует значению Tb* команды управления величиной фрикционного торможения, выводимому в тормозной контроллер 11, сходиться к значению, равному или большему абсолютного значения для значения Td команды управления возмущающим крутящим моментом, и инструктирует значению Tm* команды управления крутящим моментом электромотора сходиться к 0. Ниже описываются подробности процесса переключения.
[0035] На этапе S205, целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются на основе значения Tm* команды управления крутящим моментом электромотора, вычисленного на этапе S204, частоты ωm вращения электромотора и значения Vdc постоянного напряжения. Например, таблица, задающая взаимосвязь целевого значения тока d-оси и целевого значения тока q-оси со значением команды управления крутящим моментом электромотора, частотой вращения электромотора и значением постоянного напряжения, подготавливается заранее, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются посредством обращения к этой таблице.
[0036] На этапе S206, управление по току выполняется таким образом, чтобы сопоставлять ток id d-оси и ток iq d-оси с целевым значением id* тока d-оси и целевым значением iq* тока q-оси, полученными на этапе S205, соответственно. С этой целью, ток id d-оси и ток iq d-оси сначала получаются на основе значений iu, iv и iw трехфазного переменного тока и фазы α вращения электромотора 4, вводимых на этапе S201. Затем, значения vd и vq команд управления напряжением d-оси и q-оси вычисляются из отклонений между значениями id* и iq* команд управления током d-оси и q-оси и токами id и iq d-оси и q-оси. Следует отметить, что напряжение помехозащищенности, необходимое для того, чтобы уравновешивать напряжение помех между ортогональными осями координат d-q, может суммироваться с вычисленными значениями vd и vq команд управления напряжением d-оси и q-оси.
[0037] Затем, из значений vd и vq команд управления напряжением d-оси и q-оси и фазы α вращения электромотора 4, получаются значения vu, vv и vw команд управления трехфазным переменным напряжением. Из полученных значений vu, vv и vw команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения, получаются PWM-сигналы tu (%), tv (%) и tw (%). Посредством размыкания и замыкания переключающих элементов инвертора 3 посредством PWM-сигналов tu, tv и tw, полученных таким способом, электромотор 4 может приводиться в действие с требуемым крутящим моментом, инструктированным посредством значения Tm* команды управления крутящим моментом электромотора.
[0038] Здесь, до того, как описывается процесс управления остановкой, выполняемый на этапе S203, описывается передаточная характеристика Gp(s) от крутящего момента Tm электромотора до частоты ωm вращения электромотора в устройстве управления для электротранспортного средства согласно настоящему варианту осуществления.
[0039] Фиг. 4 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства, и соответствующие параметры в схеме являются такими, как описано ниже.
Jm - инерция электромотора
Jw - инерция ведущих колес
M - вес транспортного средства
Kd - крутильная жесткость приводной системы
Kt - коэффициент, связывающий трение между шинами и поверхностью дороги
N - полное передаточное отношение
r - радиус нагрузки шин
ωm - частота вращения электромотора
Tm - значение Tm* целевого крутящего момента
Td - крутящий момент ведущих колес
F - сила, прикладываемая к транспортному средству
V - скорость транспортного средства
ωw - угловая скорость ведущих колес
Tb - величина фрикционного торможения (крутящий момент преобразования на оси электромотора) (≥0)
[0040] Следующие уравнения движения могут извлекаться из фиг. 4.
[0041] уравнение 1

[0042] уравнение 2

[0043] уравнение 3

[0044] уравнение 4

[0045] уравнение 5

[0046] Следует отметить, что звездочка (*), присоединяемая к правому верхнему углу символа в уравнениях (1)-(3), указывает дифференциал времен. Для "±" в уравнении (2), для удобства, "+" используется на дороге, идущей в подъем, и на ровной дороге, и "-" используется на дороге, идущей под спуск.
[0047] Чтобы получать передаточную характеристику GP(s) от значения Tm целевого крутящего момента электромотора 4 до частоты ωm вращения электромотора на основе уравнений движения, показанных в уравнениях (1)-(5), передаточная характеристика GP(s) выражается посредством следующего уравнения (6).
[0048] уравнение 6

[0049] Здесь, каждый параметр в уравнении (6) выражается посредством следующих уравнений (7).
[0050] уравнение 7
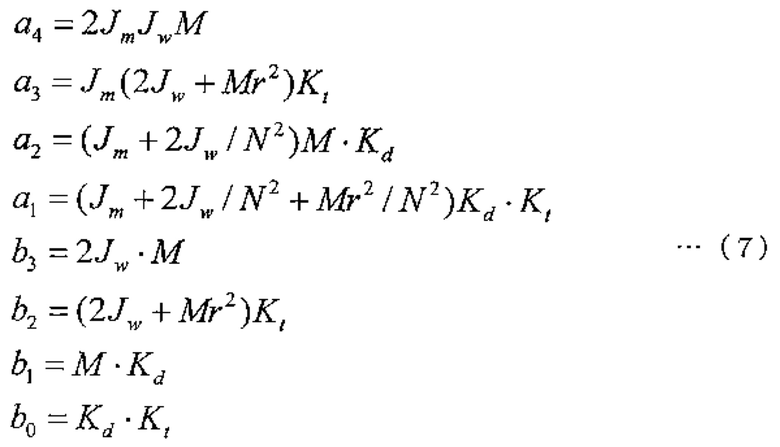
[0051] Посредством исследований, полюса и нулевые точки передаточной функции, показанной в уравнении (6), могут быть аппроксимированы в передаточную функцию следующего уравнения (8), и один полюс и одна нулевая точка указывают значения, чрезвычайно близкие друг к другу. Это является эквивалентным тому, что α и β следующего уравнения (8) указывают значения, чрезвычайно близкие друг к другу.
[0052] уравнение 8

[0053] Соответственно, посредством выполнения отмены нулей и полюсов (аппроксимации для α=β) в уравнении (8), Gp(s) составляет передаточную характеристику (второй порядок)/(третий порядок), как показано в следующем уравнении (9).
[0054] уравнение 9

[0055] Далее описывается характеристики Gpa(s) передачи от крутящего момента Tm электромотора до продольного ускорения транспортного средства и характеристика Gba(s) передачи от величины Tb фрикционного торможения до продольного ускорения a транспортного средства, в устройстве управления для электротранспортного средства согласно варианту осуществления.
[0056] Когда характеристики Gpa(s) и Gba(s) передачи получаются на основе вышеописанных уравнений движения (1)-(5), характеристики Gpa(s) и Gba(s) передачи могут выражаться посредством следующих уравнений (9) и (10).
[0057] уравнение 10

[0058] уравнение 11

[0059] Здесь, каждый параметр в уравнениях (10) и (11) выражается посредством следующего уравнения (12). Следует отметить, что для "±" в уравнении (11), для удобства, "+" используется на дороге, идущей в подъем, и на ровной дороге, и "-" используется на дороге, идущей под спуск.
[0060] уравнение 12

[0061] Процесс управления остановкой
Далее описываются подробности процесса управления остановкой, выполняемого на этапе S203 на блок-схеме последовательности операций способа по фиг. 2.
[0062] Фиг. 5 является блок-схемой для осуществления процесса управления остановкой. Процесс управления остановкой выполняется с использованием устройства 501 задания крутящего F/B-момента по частоте вращения электромотора, модуля 502 оценки возмущающего крутящего момента, сумматора 503 и модуля 504 сравнения крутящих моментов. Далее подробно описываются соответствующие конфигурации.
[0063] Устройство 501 задания крутящих F/B-моментов по частоте вращения электромотора вычисляет крутящий момент Tω обратной связи по частоте вращения электромотора (в дальнейшем в этом документе, называемый "крутящим F/B-моментом по частоте вращения электромотора") на основе определенной частоты ωm вращения электромотора. Ниже описываются подробности со ссылкой на фиг. 6.
[0064] Фиг. 6 является схемой, описывающей способ для вычисления крутящего F/B-момента Tω по частоте вращения электромотора на основе частоты ωm вращения электромотора. Устройство 501 задания крутящих F/B-моментов по частоте вращения электромотора включает в себя умножитель 601 и вычисляет крутящий F/B-момент Tω по частоте вращения электромотора посредством умножения частоты ωm вращения электромотора на усиление Kvref. Тем не менее, Kvref является отрицательным значением (со знаком "минус"), необходимым для того, чтобы останавливать электротранспортное средство непосредственно перед тем, как электротранспортное средство останавливается, и надлежащим образом задается, например, из экспериментальных данных или аналогичных данных. Крутящий F/B-момент Tω по частоте вращения электромотора задается в качестве крутящего момента, допускающего получение большей тормозной силы по мере того, как увеличивается частота ωm вращения электромотора.
[0065] Следует отметить, что хотя устройство 501 задания крутящего F/B-момента по частоте вращения электромотора описывается таким образом, что оно вычисляет крутящий F/B-момент Tω по частоте вращения электромотора посредством умножения частоты ωm вращения электромотора на усиление Kvref, крутящий F/B-момент Tω по частоте вращения электромотора может вычисляться с использованием, например, таблицы рекуперативных крутящих моментов, задающей рекуперативный крутящий момент относительно частоты ωm вращения электромотора, и таблицы темпов спада, сохраняющей темп спада частоты ωm вращения электромотора заранее.
[0066] Модуль 502 оценки возмущающего крутящего момента, проиллюстрированный на фиг. 5, вычисляет оцененное значение Td возмущающего крутящего момента на основе определенной частоты ωm вращения электромотора и значения Tm3* третьего целевого крутящего момента. Ниже описываются подробности со ссылкой на фиг. 7.
[0067] Фиг. 7 является блок-схемой, описывающей способ для вычисления оцененного значения Td возмущающего крутящего момента на основе частоты ωm вращения электромотора и значения Tm3* третьего целевого крутящего момента. Модуль 502 оценки возмущающего крутящего момента включает в себя блок 701 управления, блок 702 управления и модуль 703 вычитания.
[0068] Блок 701 управления выступает в качестве фильтра, имеющего передаточную характеристику H(s)/Gp(s), и выполняет процесс фильтрации относительно частоты ωm вращения электромотора, за счет этого вычисляя оцененное значение первого крутящего момента электромотора. H(s) представляет собой фильтр нижних частот, имеющий такую передаточную характеристику, что разность между степенью знаменателя и степенью числителя равна или больше разности между степенью знаменателя и степенью числителя модели Gp(s) (см. уравнение (9)).
[0069] Блок 702 управления функционирует в качестве фильтра нижних частот, имеющего передаточную характеристику H(s), и выполняет процесс фильтрации относительно значения Tm3* третьего целевого крутящего момента, за счет этого вычисляя оцененное значение второго крутящего момента электромотора.
[0070] После этого, модуль 703 вычитания вычитает оцененное значение первого крутящего момента электромотора из оцененного значения второго крутящего момента электромотора, чтобы вычислять оцененное значение Td возмущающего крутящего момента.
[0071] Следует отметить, что хотя возмущающий крутящий момент согласно варианту осуществления оценивается посредством модуля наблюдения возмущений, как проиллюстрировано на фиг. 7, он может оцениваться с использованием измерительного прибора, такого как датчик продольной составляющей G транспортного средства.
[0072] Здесь, хотя сопротивление воздуха, погрешность моделирования, вызываемая посредством варьирования веса транспортного средства вследствие числа пассажиров и допустимой нагрузки, сопротивление крену шин, сопротивление вследствие градиента поверхности дороги и аналогичное сопротивление считаются возмущениями, которые представляют собой цели этого варианта осуществления, фактор возмущений, доминирующий непосредственно перед остановкой транспортного средства, представляет собой сопротивление вследствие градиента. Хотя факторы возмущений отличаются в зависимости от условий вождения, факторы возмущений, описанные выше, могут совместно оцениваться, поскольку модуль 502 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основе значения Tm3* третьего целевого крутящего момента, частоты ωm вращения электромотора и модели Gp(s) транспортного средства. Это позволяет добиваться плавной остановки транспортного средства из замедления при любом состоянии движения.
[0073] Возвращаясь к фиг. 5, пояснение продолжается. Сумматор 503 суммирует крутящий F/B-момент Tω по частоте вращения электромотора, вычисленный посредством устройства 501 задания крутящего F/B-момента по частоте вращения электромотора, с оцененным значением Td возмущающего крутящего момента, вычисленным посредством модуля 502 оценки возмущающего крутящего момента, чтобы вычислять значение Tm2* второго целевого крутящего момента. Когда частота ωm вращения электромотора уменьшается и приближается к 0, крутящий F/B-момент Tω по частоте вращения электромотора также приближается 0. Соответственно, значение Tm2* второго целевого крутящего момента сходится к оцененному значению Td возмущающего крутящего момента согласно уменьшению частоты ωm вращения электромотора.
[0074] Модуль 504 сравнения крутящих моментов сравнивает абсолютные величины значения Tm1* первого целевого крутящего момента со значением Tm2* второго целевого крутящего момента и задает большее значение целевого крутящего момента в качестве значения Tm3* третьего целевого крутящего момента. Значение Tm2* второго целевого крутящего момента меньше значения Tm1* первого целевого крутящего момента во время движения транспортного средства. Когда транспортное средство замедляется и достигает момента времени непосредственно перед остановкой транспортного средства (скорость транспортного средства равна или меньше предварительно определенной скорости транспортного средства), значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента. Таким образом, когда значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, модуль 504 сравнения крутящих моментов определяет то, что транспортное средство находится в момент времени до момента времени непосредственно перед остановкой транспортного средства, и задает значение Tm1* первого целевого крутящего момента в качестве значения Tm3* третьего целевого крутящего момента. Дополнительно, когда значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, модуль 504 сравнения крутящих моментов определяет то, что транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, и переключает значение Tm3* третьего целевого крутящего момента со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента.
[0075] Следует отметить, что для того, чтобы поддерживать состояние остановки транспортного средства, значение Tm2* второго целевого крутящего момента сходится к положительному крутящему моменту на дороге, идущей в подъем, отрицательному крутящему моменту на дороге, идущей под спуск, и почти 0 на ровной дороге.
[0076] Подробности процесса управления остановкой являются такими, как описано выше. Посредством выполнения такого процесса, независимо от градиента на поверхности дороги, по которой движется транспортное средство, транспортное средство может плавно останавливаться только посредством крутящего момента электромотора, чтобы поддерживать состояние остановки транспортного средства.
[0077] Здесь, хотя только крутящий момент электромотора позволяет продолжать поддерживать состояние остановки транспортного средства для транспортного средства, которое плавно остановлено только посредством крутящего момента электромотора посредством процесса управления остановкой, как описано выше, с точки зрения аспекта затрат на электричество более предпочтительно поддерживать состояние остановки транспортного средства посредством фрикционной тормозной силы фрикционных тормозов 12, потребление тока которых меньше. Далее описываются подробности процесса переключения, который представляет собой отличительный процесс настоящего изобретения. Процесс переключения переключает средство, которое поддерживает состояние остановки транспортного средства, с электромотора 4 на фрикционные тормоза 12.
[0078] Процесс переключения
Фиг. 8 является блок-схемой последовательности операций способа, показывающей последовательность операций процесса переключения, выполняемого на этапе S204 на фиг. 2, в этом варианте осуществления.
[0079] На этапе S801, контроллер 2 электромотора определяет то, равна или нет позиция акселератора 0, с тем чтобы определять то, что водитель имеет намерение трогания с места. Когда позиция акселератора равна 0, контроллер 2 электромотора определяет то, что водитель не имеет намерения трогания с места, с тем чтобы выполнять процесс на следующем этапе S802. Когда позиция акселератора не равна 0, контроллер 2 электромотора определяет то, что водитель имеет намерение трогания с места, с тем чтобы выполнять процесс на этапе S805.
[0080] На этапе S802, контроллер 2 электромотора определяет то, равна или нет частота ωm вращения электромотора 0, с тем чтобы подтверждать то, находится или нет транспортное средство в состоянии остановки транспортного средства. Когда частота ωm вращения электромотора равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии остановки транспортного средства, с тем чтобы выполнять процесс на следующем этапе S803. Когда частота ωm вращения электромотора не равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии движения, с тем чтобы выполнять процесс на этапе S805.
[0081] Следует отметить, что частота ωm вращения электромотора, которая представляет собой индекс, чтобы определять состояние остановки транспортного средства, не обязательно равна 0 и может составлять предварительно определенное чрезвычайно небольшое значение. Это предварительно определенное значение, например, составляет значение, приемлемое с точки зрения аспекта затрат на электричество, и при этом поддержания состояния остановки транспортного средства для транспортного средства посредством крутящего момента электромотора.
[0082] На этапе S803, определяется средство, которое поддерживает состояние остановки транспортного средства. Когда флаг переключения равен 1, определяется то, что фрикционные тормоза 12 выполняют поддержание остановки транспортного средства, с тем чтобы выполнять процесс на этапе S804. Когда флаг переключения равен 0, определяется то, что электромотор 4 выполняет поддержание остановки транспортного средства, с тем чтобы выполнять процесс на этапе S805.
[0083] Этот процесс позволяет продолжать поддерживать состояние остановки транспортного средства посредством электромотора 4 в зависимости от параметра (в дальнейшем называемое просто "состоянием транспортного средством), который представляет собой индекс, показывающий состояние транспортного средства, и отличается от частоты ωm вращения электромотора, без равномерного переключения средства поддержания остановки транспортного средства с электромотора 4 на фрикционные тормоза 12, когда частота ωm вращения электромотора становится почти равной 0. Это позволяет обеспечивать необходимый минимум частоты трогания с места из состояния поддержания остановки транспортного средства посредством фрикционных тормозов 12. Ниже описываются состояние транспортного средства, учитываемое посредством этого процесса, и задание флага переключения со ссылкой на фиг. 10.
[0084] На этапе S804, поскольку водитель не имеет намерения трогания с места, транспортное средство находится в состоянии остановки транспортного средства, и флаг переключения равен 1, выполняется процесс, который переключает средство, которое поддерживает состояние остановки транспортного средства, с крутящего момента электромотора на фрикционные тормоза. В частности, контроллер 2 электромотора задает значение Tm* команды управления крутящим моментом электромотора равным 0 и задает значение Tb* команды управления величиной фрикционного торможения в качестве абсолютного значения для значения третьего целевого крутящего момента Tm*.
[0085] Следует отметить, что значение, к которому значение Tm* команды управления крутящим моментом электромотора сходится на этом этапе, не обязательно равно 0 и может составлять чрезвычайно небольшое значение, например, приблизительно 1-2N, который является приемлемым с точки зрения аспекта затрат на электричество. Такое значение обеспечивает более быстрый переход в состояние движения, когда величина фрикционного торможения сбрасывается, чтобы трогать с места транспортное средство из состояния остановки.
[0086] Как описано выше, поскольку значение Tm* третьего целевого крутящего момента является значением, которое совпадает с оцененным значением Td возмущающего крутящего момента в состоянии остановки транспортного средства, значение Tb* команды управления величиной фрикционного торможения сбалансировано с оцененным значением Td возмущающего крутящего момента и является значением команды управления, которое инструктирует фрикционным тормозам 12 выводить величину фрикционного торможения, которая может поддерживать состояние остановки транспортного средства для транспортного средства, через тормозной контроллер 11. Это позволяет переключать средство, которое поддерживает состояние остановки транспортного средства, с электромотора 4 на фрикционные тормоза 12 и поддерживать состояние остановки транспортного средства для транспортного средства.
[0087] Следует отметить, что в это время, значение, к которому сходится значение Tb* команды управления величиной фрикционного торможения, может быть равным или большим абсолютного значения разности между оцененным значением Td возмущающего крутящего момента и значением Tm* команды управления крутящим моментом электромотора (Tb* ≥ |Td-Tm*|). Это позволяет обеспечивать устойчивость относительно дисперсии величины фрикционного торможения, вызываемой посредством, например, состояния износа фрикционных тормозов 12 и изменения вязкости масла посредством температуры, чтобы поддерживать состояние остановки транспортного средства без отката/наката транспортного средства.
[0088] С другой стороны, на этапе S805, поскольку водитель имеет намерение трогания с места, транспортное средство находится в состоянии движения, или флаг переключения равен 0, значение Tm* команды управления крутящим моментом электромотора задается равным значению значения Tm3* третьего целевого крутящего момента, и значение Tb* команды управления величиной фрикционного торможения задается равным 0. Таким образом, отсутствует вмешательство со стороны фрикционных тормозов 12, и транспортное средство выполнено с возможностью двигаться посредством крутящего момента электромотора.
[0089] На следующем этапе S806, контроллер 2 электромотора выполняет процесс фильтрации с учетом скорости отклика величины фрикционного торможения, для значения Tm* команды управления крутящим моментом электромотора.
[0090] В этом процессе, выполняется процесс фильтрации для регулирования темпа изменения, когда значение Tm* команды управления крутящим моментом электромотора принудительно сходится к значению (0 или значению Tm3* третьего целевого крутящего момента), заданному на этапе S804 и этапе S805, с учетом скорости отклика величины фрикционного торможения. Посредством выполнения такого процесса, даже когда средство, которое поддерживает состояние остановки транспортного средства, переключается между крутящим моментом электромотора и величиной фрикционного торможения, может постоянно сохраняться сила поддержания остановки транспортного средства в качестве транспортного средства. Ниже приводится конкретное описание со ссылкой на фиг. 9.
[0091] Фиг. 9 является блок-схемой, описывающей процесс фильтрации с учетом скорости отклика величины фрикционного торможения, выполняемый для значения Tm* команды управления крутящим моментом электромотора.
[0092] На этапе S806, фильтр Hba(s), выражаемый посредством следующего уравнения (13), выполняется для значения Tm* команды управления крутящим моментом электромотора, чтобы вычислять значение Tm* команды управления крутящим моментом электромотора после процесса фильтрации.
[0093] уравнение 13

[0094] Здесь, Hbrk(s) в уравнении (13) выражается посредством следующего уравнения (14).
уравнение 14

[0095] Задержка отклика актуатора фрикционных тормозов 12 представляется посредством τb в уравнении (14).
[0096] На этапе S806, вследствие того, что процесс фильтрации посредством фильтра Hba(s), выражаемого посредством уравнения (13), выполняется для значения Tm* команды управления крутящим моментом электромотора, может вычисляться значение Tm* команды управления крутящим моментом электромотора с учетом задержки отклика величины фрикционного торможения фрикционных тормозов 12 относительно значения команды управления величиной фрикционного торможения. Это позволяет постоянно сохранять силу поддержания остановки транспортного средства, которая действует на фактическое транспортное средство даже во время переключения между крутящим моментом электромотора и фрикционной тормозной силой посредством фрикционных тормозов 12.
[0097] Процесс переключения согласно этапу S204 завершается, как описано выше. После этого, в процессах от этапа S205, проиллюстрированных на фиг. 2, на основе значения Tm* команды управления крутящим моментом электромотора и значения Tb* команды управления величиной фрикционного торможения, полученных на этапе S204, управляются электромотор 4 и фрикционные тормоза 12.
[0098] Далее описывается флаг переключения, определенный на S803, со ссылкой на фиг. 10. Фиг. 10 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения.
[0099] На этапе S1001, контроллер 2 электромотора определяет то, равна или нет позиция акселератора 0, с тем чтобы определять намерение трогания с места водителя. Когда позиция акселератора равна 0, контроллер 2 электромотора определяет то, что водитель не имеет намерения трогания с места, с тем чтобы выполнять процесс на следующем этапе S1002. Когда позиция акселератора не равна 0, контроллер 2 электромотора определяет то, что водитель имеет намерение трогания с места, с тем чтобы выполнять процесс на этапе S1005.
[0100] На этапе S1002, контроллер 2 электромотора определяет то, равна или нет частота ωm вращения электромотора 0, с тем чтобы подтверждать то, находится или нет транспортное средство в состоянии остановки транспортного средства. Когда частота ωm вращения электромотора равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии остановки транспортного средства, с тем чтобы выполнять процесс на следующем этапе S1003. Когда частота ωm вращения электромотора не равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии движения, с тем чтобы выполнять процесс на этапе S1005.
[0101] На этапе S1003, контроллер 2 электромотора определяет то, равно предыдущее значение флага переключения 0 или 1. Когда предыдущее значение флага переключения равно 0, контроллер 2 электромотора выполняет процесс на этапе S1004, чтобы определять то, переключается или нет средство поддержания остановки транспортного средства с крутящего момента электромотора на фрикционную тормозную силу фрикционных тормозов 12. Когда предыдущее значение флага переключения равно 1, контроллер 2 электромотора выполняет процесс на этапе S1006, чтобы поддерживать состояние остановки транспортного средства посредством фрикционных тормозов 12. Этот процесс поддерживает состояние поддержания остановки транспортного средства посредством фрикционных тормозов 12 до трогания с места после того, как средство поддержания остановки транспортного средства переключается с крутящего момента электромотора на фрикционные тормоза 12. Другими словами, после управления остановкой на этапе S203, выполняется управление таким образом, что крутящий момент электромотора сходится к оцененному значению возмущающего крутящего момента после того, как средство поддержания остановки транспортного средства переключается с крутящего момента электромотора на фрикционные тормоза 12, состояние поддержания остановки транспортного средства посредством фрикционных тормозов 12 поддерживается до тех пор, пока не будет увеличена позиция акселератора. Это позволяет исключать, например, возникновение звука и увеличение нагрузки по обработке, вызываемые посредством частого переключения средства поддержания остановки транспортного средства.
[0102] На этапе S1004, контроллер 2 электромотора определяет то, равно или меньше либо нет абсолютное значение оцененного значения возмущающего крутящего момента в качестве индекса, показывающего состояние транспортного средства, порогового значения Td_th. Когда абсолютное значение оцененного значения возмущающего крутящего момента равно или меньше порогового значения Td_th, контроллер 2 электромотора определяет то, что градиент является небольшим, или транспортное средство находится на ровной дороге, с тем чтобы выполнять процесс на этапе S1005. Когда абсолютное значение оцененного значения возмущающего крутящего момента превышает пороговое значение Td_th, контроллер 2 электромотора определяет то, что градиент является большим, с тем чтобы выполнять процесс на этапе S1006.
[0103] Здесь, приводится описание порогового значения Td_th. Как описано выше, величина фрикционного торможения для выполнения поддержания остановки транспортного средства определяется на основе оцененного значения возмущающего крутящего момента. Оцененное значение возмущающего крутящего момента учитывает не только сопротивление вследствие градиента, но также и фрикционное сопротивление на поверхности дороги и компонент сопротивления посредством трения электромотора в качестве возмущений, за счет этого имея значение даже на ровной дороге. Тем не менее, на ровной дороге, необязательно выполнять поддержание остановки транспортного средства посредством фрикционных тормозов 12. Например, в той мере, в какой градиент составляет приблизительно 1-2%, допустимо с точки зрения аспекта затрат на электричество, даже если состояние остановки транспортного средства для транспортного средства поддерживается посредством крутящего момента электромотора. Таким образом, когда пусковые качества приоритезированы, предпочтительно, если поддержание остановки транспортного средства выполняется посредством крутящего момента электромотора.
[0104] Соответственно, оцененное значение возмущающего крутящего момента для определения нахождения на ровной дороге или для определения нахождения на градиенте до такой степени, в которой эффект сокращения затрат на электричество не ожидается, задается в качестве порогового значения Td_th согласно варианту осуществления. Это обеспечивает плавное трогание с места посредством крутящего момента электромотора, поскольку необязательное переключение на фрикционные тормоза на ровной дороге или при небольшом градиенте не возникает.
[0105] На этапе S1005, контроллер 2 электромотора задает флаг переключения равным 0, поскольку оно находится на ровной дороге или на дороге с небольшим градиентом, в силу этого исключая необходимость в переключении на фрикционные тормоза с точки зрения аспекта пусковых качеств.
[0106] На этапе S1006, контроллер 2 электромотора задает флаг переключения равным 1, поскольку градиент является большим, чтобы требовать переключения на фрикционное торможение с точки зрения аспекта затрат на электричество.
[0107] На этапе S1007, контроллер 2 электромотора сохраняет флаг переключения, заданный на этапе S1005 или этапе S1006, равным предыдущему значению флага переключения.
[0108] Далее описываются преимущества, когда устройство управления согласно одному варианту осуществления, описанное выше, применяется к электротранспортному средству со ссылкой на фиг. 11 и 12.
[0109] Фиг. 11 и фиг. 12 являются временными диаграммами, показывающими результаты управления, когда, устройство управления в этом варианте осуществления применяется к электротранспортному средству. Фиг. 11(a) и фиг. 12(a) показывают результат управления на дороге, идущей под спуск, и фиг. 11(b) и фиг. 12(b) показывают результат управления на дороге, идущей в подъем. Фиг. 11 и фиг. 12 показывают, относительно времени, выражаемого посредством горизонтальной оси, сверх, значение команды управления крутящим моментом электромотора, значение команды управления величиной фрикционного торможения, частоту вращения электромотора, определенное значение датчика продольного ускорения транспортного средства, позицию акселератора и флаг переключения.
[0110] На диаграмме, представляющей значение команды управления крутящим моментом электромотора, сплошная линия указывает значение команды управления крутящим моментом электромотора, пунктирная линия указывает оцененное значение возмущающего крутящего момента, пунктирная линия указывает значение первого целевого крутящего момента, и штрихпунктирная линия с одной точкой указывает значение второго целевого крутящего момента. На диаграмме, представляющей значение команды управления величиной фрикционного торможения, сплошная линия указывает значение команды управления фрикционной тормозной силы, и пунктирная линия указывает оцененное значение возмущающего крутящего момента.
[0111] Фиг. 11(a) и (b) являются временными диаграммами, показывающими окружение, в котором средство поддержания остановки транспортного средства переключается с электромотора 4 на фрикционные тормоза 12 после того, как транспортное средство плавно останавливается посредством крутящего момента электромотора посредством процесса управления остановкой.
[0112] Во время t0, электромотор 4 управляется на основе значения Tm1* первого целевого крутящего момента, вычисленного на этапе S202, чтобы замедлять транспортное средство.
[0113] Во время t1, вследствие того, что модуль 504 сравнения крутящих моментов, проиллюстрированный на фиг. 5, определяет то, что сейчас момент времени непосредственно перед остановкой транспортного средства, значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента.
[0114] Во время t2, независимо от градиента, значение Tm* команды управления крутящим моментом электромотора сходится к оцененному значению Td возмущающего крутящего момента, и частота ωm вращения электромотора асимптотически сходится к 0. Таким образом, транспортное средство плавно останавливается без вибрации при ускорении. Затем состояние остановки транспортного средства поддерживается только посредством крутящего момента электромотора.
[0115] Во время t3, позиция акселератора равна 0, и частота вращения электромотора равна 0, и дополнительно, флаг переключения равен 1. Таким образом, определяется, что транспортное средство находится в состоянии остановки транспортного средства, чтобы переключать средство поддержания остановки транспортного средства с электромотора 4 на фрикционные тормоза 12. В этом отношении, команда Tb* управления величиной фрикционного торможения сходится от 0 к абсолютному значению |Td| для оцененного значения Td возмущающего крутящего момента, и значение Tm* команды управления крутящим моментом электромотора сходится от значения, которое сопоставляет оцененное значение Td возмущающего крутящего момента, с темпом изменения с учетом скорости отклика величины фрикционного торможения, к 0.
[0116] Затем во время t4, переключение с электромотора 4 на фрикционные тормоза 12 завершается, чтобы поддерживать состояние остановки транспортного средства только посредством фрикционных тормозов 12.
[0117] Как описано выше, из результата управления, проиллюстрированного на фиг. 11, можно видеть, что турбулентность, которая вызывает вибрацию при ускорении, не возникает в определенном значении датчика продольного ускорения транспортного средства, когда транспортное средство останавливается во время t2, и в процессе переключения во время t3, транспортное средство плавно останавливается на дороге (a), идущей под спуск, или дороге (b), идущей в подъем, и сила поддержания остановки транспортного средства в качестве транспортного средства может постоянно сохраняться, даже когда средство поддержания остановки транспортного средства переключается.
[0118] Фиг. 12(a) и (b) являются временными диаграммами, показывающим от состояния, в котором состояние остановки транспортного средства для транспортного средства поддерживается посредством тормозной силы посредством фрикционных тормозов 12, до окружения, в котором средство трогается с места таким образом, что водитель нажимает педаль акселератора.
[0119] Во время t0, состояние остановки транспортного средства поддерживается посредством величины фрикционного торможения, эквивалентной абсолютному значению |Td| для оцененного значения Td возмущающего крутящего момента.
[0120] Во время t1, вследствие того, что водитель нажимает педаль акселератора, значение Tm1* первого целевого крутящего момента постепенно увеличивается. Поскольку позиция акселератора увеличивается, определяется то, что водитель имеет намерение трогания с места. Таким образом, значение Tb* команды управления величиной фрикционного торможения сходится от абсолютного значения |Td| оцененного значения Td возмущающего крутящего момента к 0, и значение Tm* команды управления крутящим моментом электромотора сходится от 0 к значению, которое сопоставляет оцененное значение Td возмущающего крутящего момента с темпом изменения с учетом скорости отклика величины фрикционного торможения. Это снова переключает средство поддержания остановки транспортного средства с фрикционных тормозов 12, переключенных с электромотора 4, на электромотор 4 в качестве источника приведения в движение.
[0121] Во время t2, поскольку модуль 504 сравнения крутящих моментов, проиллюстрированный на фиг. 5, определяет то, что значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, значение Tm* команды управления крутящим моментом электромотора переключается со значения Tm2* второго целевого крутящего момента на значение Tm1* первого целевого крутящего момента.
[0122] Во время t3, транспортное средство ускоряется согласно значению Tm1* первого целевого крутящего момента.
[0123] Как описано выше, из результата управления, проиллюстрированного на фиг. 12, можно видеть, что турбулентность, которая вызывает вибрацию при ускорении, не возникает в определенном значении датчика продольного ускорения транспортного средства даже при переключении с фрикционных тормозов 12 на электромотор 4 во время t1, и переход из состояния остановки транспортного средства в состояние движения в соответствии с переключением плавно выполняется.
[0124] Таким образом, можно видеть, что переключение с электромотора 4 на фрикционные тормоза 12 может уменьшать величину потребления тока в окружении, которое продолжает поддерживать состояние остановки транспортного средства на дороге с уклоном, и переключение между электромотором 4 и фрикционными тормозами 12 может плавно выполняться без вибрации при ускорении в транспортном средстве.
[0125] Как описано выше, устройство управления для электротранспортного средства в первом варианте осуществления, в электротранспортном средстве, включающем в себя электромотор 4, который функционирует в качестве источника приведения в движение и предоставляет рекуперативную тормозную силу в транспортное средство, и фрикционные тормоза 12, которые предоставляют фрикционную тормозную силу в транспортное средство, определяет частоту ωm вращения электромотора, пропорциональную скорости движения этого электротранспортного средства, оценивает возмущающий крутящий момент, который действует на электромотор 4, и выполняет управление таким образом, что значение команды управления крутящим моментом электромотора сходится к оцененному значению Td возмущающего крутящего момента по мере того, как уменьшается частота ωm вращения электромотора. После этого, когда частота ωm вращения электромотора становится почти равной 0, устройство управления выполняет управление таким образом, что значение команды управления величиной фрикционного торможения относительно фрикционных тормозов 12 сходится к значению, определенному на основе оцененного значения Td возмущающего крутящего момента, и инструктирует значению команды управления крутящим моментом электромотора сходиться почти к 0. Это позволяет уменьшать величину потребления тока электромотора 4 при поддержании состояния остановки транспортного средства для транспортного средства посредством фрикционной тормозной силы, за счет этого сокращая затраты на электричество транспортного средства.
[0126] Устройство управления для электротранспортного средства в первом варианте осуществления инструктирует значению Tb* команды управления величиной фрикционного торможения относительно фрикционных тормозов 12 сходиться к значению, равному или большему разности между оцененным значением Td возмущающего крутящего момента и значением Tm* команды управления крутящим моментом электромотора, когда частота ωm вращения электромотора становится равной или меньше предварительно определенного значения, определенного заранее. Это позволяет обеспечивать устойчивость относительно дисперсии величины фрикционного торможения, которая действует на ведущие колеса согласно значению Tb* команды управления величиной фрикционного торможения, чтобы поддерживать состояние остановки транспортного средства без формирования отката/наката транспортного средства.
[0127] В устройстве управления для электротранспортного средства в первом варианте осуществления, темп изменения значения Tm* команды управления крутящим моментом электромотора, когда это значение Tm* команды управления крутящим моментом электромотора принудительно сходится к оцененному значению Td возмущающего крутящего момента, регулируется согласно задержке отклика относительно значения Tb* команды управления величиной фрикционного торможения для величины фрикционного торможения. Это позволяет постоянно сохранять силу поддержания остановки транспортного средства в качестве транспортного средства, даже при переключении с электромотора 4 на фрикционные тормоза 12. Поскольку потребление тока электромотора, требуемое для постоянного сохранения силы поддержания остановки транспортного средства, может уменьшаться до минимума, затраты на электричество могут сокращаться в большей степени.
[0128] Устройство управления для электротранспортного средства в первом варианте осуществления инструктирует значению Tm* команды управления крутящим моментом электромотора сходиться к значению Tm3* третьего целевого крутящего момента и инструктирует значению Tb* команды управления величиной фрикционного торможения сходиться к 0, когда электротранспортное средство трогается с места из состояния, которое поддерживает состояние остановки транспортного средства посредством величины фрикционного торможения. Это позволяет плавно трогать с места транспортное средство из состояния остановки транспортного средства без формирования отката/наката транспортного средства.
[0129] Кроме того, в устройстве управления для электротранспортного средства в первом варианте осуществления, темп изменения значения Tm* команды управления крутящим моментом электромотора, когда это значение Tm* команды управления крутящим моментом электромотора принудительно сходится к значению Tm3* третьего целевого крутящего момента, регулируется согласно задержке отклика относительно значения Tb* команды управления величиной фрикционного торможения для величины фрикционного торможения. Это позволяет постоянно сохранять силу поддержания остановки транспортного средства в качестве транспортного средства, даже при переключении с фрикционных тормозов 12 на электромотор 4. Поскольку потребление тока электромотора, требуемое для постоянного сохранения силы поддержания остановки транспортного средства, может уменьшаться до минимума, затраты на электричество могут сокращаться в большей степени.
[0130] Устройство управления для электротранспортного средства в первом варианте осуществления выполняет управление таким образом, что величина фрикционного торможения фрикционных тормозов 12 сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктирует крутящему моменту электромотора сходиться почти к 0, когда частота ωm вращения электромотора становится почти равной 0, и параметр, который представляет собой индекс, показывающий состояние транспортного средства и отличающийся от частоты ωm вращения электромотора, равен или превышает предварительно определенное значение. Это позволяет продолжать поддерживать остановку транспортного средства посредством электромотора 4 в зависимости от окружения, без равномерного переключения средства поддержания остановки транспортного средства с электромотора 4 на фрикционные тормоза 12, когда частота вращения электромотора становится почти равной 0, за счет этого обеспечивая необходимый минимум частоты трогания с места из состояния остановки транспортного средства посредством фрикционных тормозов 12
[0131] Устройство управления для электротранспортного средства в первом варианте осуществления выполняет управление таким образом, что величина фрикционного торможения фрикционных тормозов 12 сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктирует крутящему моменту электромотора сходиться почти к 0, когда частота ωm вращения электромотора становится почти равной 0, и оцененное значение возмущающего крутящего момента равно или превышает предварительно определенное пороговое значение Td_th. Это позволяет исключать необязательное переключение на фрикционные тормоза 12 на ровной дороге или на дороге с небольшим градиентом, чтобы обеспечивать плавное трогание с места при остановке транспортного средства посредством крутящего момента электромотора.
[0132] Устройство управления для электротранспортного средства в первом варианте осуществления определяет позицию акселератора, которая представляет собой рабочее состояние педали акселератора, и когда управление выполняется таким образом, что величина фрикционного торможения фрикционных тормозов 12 сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и крутящий момент электромотора сходится почти к 0, поддерживает состояние, в котором величина фрикционного торможения фрикционных тормозов 12 сходится к возмущающему крутящему моменту до тех пор, пока не будет увеличена позиция акселератора. Это позволяет предотвращать частое переключение средства поддержания остановки транспортного средства в состоянии остановки транспортного средства для транспортного средства.
[0133] Второй вариант осуществления
Устройство управления для электротранспортного средства во втором варианте осуществления отличается от устройства управления в первом варианте осуществления по способу задания флага переключения. Более конкретно, отличается состояние транспортного средства, учитываемое при задании флага переключения. Далее описывается, главным образом, отличие от первого варианта осуществления, для устройства управления для электротранспортного средства во втором варианте осуществления.
[0134] Фиг. 13 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения во втором варианте осуществления.
[0135] На этапе S1301, контроллер 2 электромотора определяет то, равна или нет позиция акселератора 0, с тем чтобы определять намерение трогания с места водителя. Когда позиция акселератора равна 0, контроллер 2 электромотора определяет то, что водитель не имеет намерения трогания с места, с тем чтобы выполнять процесс на следующем этапе S1302. Когда позиция акселератора не равна 0, контроллер 2 электромотора определяет то, что водитель имеет намерение трогания с места, с тем чтобы выполнять процесс на этапе S1305.
[0136] На этапе S1302, контроллер 2 электромотора определяет то, равна или нет частота ωm вращения электромотора 0, с тем чтобы подтверждать то, находится или нет транспортное средство в состоянии остановки транспортного средства. Когда частота ωm вращения электромотора равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии остановки транспортного средства, с тем чтобы выполнять процесс на следующем этапе S1303. Когда частота ωm вращения электромотора не равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии движения, с тем чтобы выполнять процесс на этапе S1305.
[0137] На этапе S1303, контроллер 2 электромотора определяет то, равно предыдущее значение флага переключения 0 или 1. Когда предыдущее значение флага переключения равно 0, контроллер 2 электромотора выполняет процесс на этапе S1304, чтобы определять то, переключается или нет средство поддержания остановки транспортного средства с крутящего момента электромотора на фрикционную тормозную силу фрикционных тормозов 12. Когда предыдущее значение флага переключения равно 1, контроллер 2 электромотора выполняет процесс на этапе S1306, чтобы поддерживать состояние остановки транспортного средства посредством фрикционных тормозов 12.
[0138] На этапе S1304, контроллер 2 электромотора определяет то, равна или меньше либо нет температура электромотора в качестве индекса, показывающего состояние транспортного средства, порогового значения TM_th. Пороговое значение TM_th задается с возможностью иметь достаточный допустимый запас относительно температуры (температуры охватывания теплового ограничения), при которой тепловое ограничение охватывает температуру электромотора 4 или инвертора 3. Когда температура электромотора равна или меньше порогового значения TM_th, контроллер 2 электромотора определяет то, что имеется достаточный допустимый запас относительно температуры охватывания теплового ограничения, с тем чтобы выполнять процесс на этапе S1305. Когда температура электромотора превышает пороговое значение TM_th, контроллер 2 электромотора определяет то, что отсутствует достаточный допустимый запас относительно температуры охватывания теплового ограничения, с тем чтобы выполнять процесс на этапе S1306.
[0139] Учет температуры электромотора в качестве индекса, показывающего состояние транспортного средства, позволяет исключать влияние теплового ограничения посредством роста температуры электромотора 4 или инвертора 3, например, когда оно находится на резком градиенте, который требует большого крутящего момента, либо когда транспортное средство останавливается в течение длительного времени. Следует отметить, что температура электромотора может использовать действующее значение, определенное посредством датчика, или может использовать оцененное значение, оцененное с использованием известной технологии.
[0140] На этапе S1305, контроллер 2 электромотора задает флаг переключения равным 0, поскольку имеется достаточный допустимый запас в температуре охватывания теплового ограничения, чтобы исключать необходимость в переключении на фрикционные тормоза 12 с точки зрения аспекта пусковых качеств.
[0141] На этапе S1306, контроллер 2 электромотора задает флаг переключения равным 1, поскольку отсутствует достаточный допустимый запас в температуре охватывания теплового ограничения, чтобы требовать переключения на фрикционные тормоза 12.
[0142] На этапе S1307, контроллер 2 электромотора сохраняет флаг переключения, заданный на этапе S1305 или этапе S1306, равным предыдущему значению флага переключения.
[0143] Как описано выше, устройство управления для электротранспортного средства во втором варианте осуществления выполняет управление таким образом, что величина фрикционного торможения фрикционных тормозов 12 сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктирует крутящему моменту электромотора сходиться почти к 0, когда частота ωm вращения электромотора становится почти равной 0, и температура электромотора 4 равна или превышает предварительно определенное пороговое значение TM_th. Это позволяет исключать необязательное переключение на фрикционные тормоза 12 с точки зрения аспекта пусковых качеств, чтобы исключать влияние теплового ограничения и обеспечивать плавное трогание с места при остановке транспортного средства посредством крутящего момента электромотора.
[0144] Третий вариант осуществления
В устройстве управления для электротранспортного средства в третьем варианте осуществления, состояние транспортного средства, учитываемое при задании флага переключения, отличается от состояний в первом и втором вариантах осуществления. Далее описывается, главным образом, отличие согласно заданию флага переключения от вышеописанных вариантов осуществления, для устройства управления для электротранспортного средства в третьем варианте осуществления.
[0145] Фиг. 14 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения в третьем варианте осуществления.
[0146] На этапе S1401, контроллер 2 электромотора определяет то, равна или нет позиция акселератора 0, с тем чтобы определять намерение трогания с места водителя. Когда позиция акселератора равна 0, контроллер 2 электромотора определяет то, что водитель не имеет намерения трогания с места, с тем чтобы выполнять процесс на следующем этапе S1402. Когда позиция акселератора не равна 0, контроллер 2 электромотора определяет то, что водитель имеет намерение трогания с места, с тем чтобы выполнять процесс на этапе S1405.
[0147] На этапе S1402, контроллер 2 электромотора определяет то, равна или нет частота ωm вращения электромотора 0, с тем чтобы подтверждать то, находится или нет транспортное средство в состоянии остановки транспортного средства. Когда частота ωm вращения электромотора равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии остановки транспортного средства, с тем чтобы выполнять процесс на следующем этапе S1403. Когда частота ωm вращения электромотора не равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии движения, с тем чтобы выполнять процесс на этапе S1405.
[0148] На этапе S1403, контроллер 2 электромотора определяет то, равно предыдущее значение флага переключения 0 или 1. Когда предыдущее значение флага переключения равно 0, контроллер 2 электромотора выполняет процесс на этапе S1404, чтобы определять то, переключается или нет средство поддержания остановки транспортного средства с крутящего момента электромотора на фрикционную тормозную силу фрикционных тормозов 12. Когда предыдущее значение флага переключения равно 1, контроллер 2 электромотора выполняет процесс на этапе S1406, чтобы поддерживать состояние остановки транспортного средства посредством фрикционных тормозов 12.
[0149] На этапе S1404, контроллер 2 электромотора определяет то, равен или меньше либо нет период длительности остановки транспортного средства (период остановки транспортного средства) в качестве индекса, показывающего состояние транспортного средства, порогового значения T_th. Пороговое значение T_th задается равным времени, которое учитывает влияние на затраты на электричество и тепловое ограничение посредством повышения температуры электромотора и не заставляет водителя испытывать некомфортное ощущение, вызываемое в связи с тем, что средство поддержания остановки транспортного средства переключается на фрикционные тормоза 12 в течение короткого периода остановки транспортного средства. Когда период остановки транспортного средства равен или меньше порогового значения T_th, контроллер 2 электромотора выполняет процесс на этапе S1405. Когда период остановки транспортного средства превышает пороговое значение T_th, контроллер 2 электромотора выполняет процесс на этапе S1406. Ниже описывается способ вычисления периода остановки транспортного средства.
[0150] На этапе S1405, переключение на фрикционные тормоза не является необходимостью, поскольку период остановки транспортного средства является небольшим, влияние затрат на электричество и теплового ограничения посредством повышения температуры электромотора является небольшим, и переключение при каждой остановке/трогании с места, например, при ожидании на светофоре или посредством пробки, вызывает некомфортное ощущение у водителя. Таким образом, контроллер 2 электромотора задает флаг переключения равным 0.
[0151] На этапе S1406, переключение на фрикционные тормоза является необходимостью с точки зрения аспекта затрат на электричество и теплового ограничения для электромотора, поскольку период остановки транспортного средства является длительным. Таким образом, контроллер 2 электромотора задает флаг переключения равным 1.
[0152] На этапе S1407, контроллер 2 электромотора сохраняет флаг переключения, заданный на этапе S1405 или этапе S1406, равным предыдущему значению флага переключения.
[0153] Ниже описывается способ вычисления периода остановки транспортного средства со ссылкой на фиг. 15.
[0154] На этапе S1501, контроллер 2 электромотора определяет то, равна или нет частота ωm вращения электромотора 0. Когда частота ωm вращения электромотора равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии остановки транспортного средства, с тем чтобы выполнять процесс на следующем этапе S1502. Когда частота ωm вращения электромотора не равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии движения, с тем чтобы выполнять процесс на этапе S1503.
[0155] На этапе S1502, контроллер 2 электромотора суммирует 1 с предыдущим значением CNT_z счетчика, чтобы вычислять значение CNT счетчика.
[0156] С другой стороны, на этапе S1503, контроллер 2 электромотора сбрасывает значение CNT счетчика до 0.
[0157] На этапе S1504, контроллер 2 электромотора умножает период работы Tsmp контроллера 2 электромотора на значение CNT счетчика, чтобы вычислять период остановки транспортного средства. Вычисленный период остановки транспортного средства используется в качестве периода длительности остановки транспортного средства (периода остановки транспортного средства) в качестве индекса, показывающего состояние транспортного средства на вышеописанном этапе S1404.
[0158] На этапе S1505, контроллер 2 электромотора сохраняет значение CNT счетчика равным предыдущему значению CNT_z счетчика.
[0159] Как описано выше, устройство управления для электротранспортного средства в третьем варианте осуществления выполняет управление таким образом, что величина фрикционного торможения фрикционных тормозов 12 сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктирует крутящему моменту электромотора сходиться почти к 0, когда частота ωm вращения электромотора становится почти равной 0, и период остановки транспортного средства равен или превышает предварительно определенное пороговое значение T_th. Это позволяет исключать частое переключение средства поддержания остановки транспортного средства в окружении, в котором период остановки транспортного средства является небольшим, например, при ожидании на светофоре или посредством пробки, за счет этого обеспечивая плавную остановку/трогание с места посредством крутящего момента электромотора в окружении, в котором период остановки транспортного средства является небольшим.
[0160] Четвертый вариант осуществления
В устройстве управления для электротранспортного средства в четвертом варианте осуществления, состояние транспортного средства, учитываемое при задании флага переключения, отличается от состояний в первом-третьем вариантах осуществления. Далее описывается, главным образом, отличие согласно заданию флага переключения от вышеописанных вариантов осуществления, для устройства управления для электротранспортного средства в четвертом варианте осуществления.
[0161] Фиг. 16 является блок-схемой последовательности операций способа, показывающей последовательность операций задания флага переключения в четвертом варианте осуществления.
[0162] На этапе S1601, контроллер 2 электромотора определяет то, равна или нет позиция акселератора 0, с тем чтобы определять намерение трогания с места водителя. Когда позиция акселератора равна 0, контроллер 2 электромотора определяет то, что водитель не имеет намерения трогания с места, с тем чтобы выполнять процесс на следующем этапе S1602. Когда позиция акселератора не равна 0, контроллер 2 электромотора определяет то, что водитель имеет намерение трогания с места, с тем чтобы выполнять процесс на этапе S1605.
[0163] На этапе S1602, контроллер 2 электромотора определяет то, равна или нет частота ωm вращения электромотора 0, с тем чтобы подтверждать то, находится или нет транспортное средство в состоянии остановки транспортного средства. Когда частота ωm вращения электромотора равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии остановки транспортного средства, с тем чтобы выполнять процесс на следующем этапе S1603. Когда частота ωm вращения электромотора не равна 0, контроллер 2 электромотора определяет то, что транспортное средство находится в состоянии движения, с тем чтобы выполнять процесс на этапе S1605.
[0164] На этапе S1603, контроллер 2 электромотора определяет то, равно предыдущее значение флага переключения 0 или 1. Когда предыдущее значение флага переключения равно 0, контроллер 2 электромотора выполняет процесс на этапе S1604, чтобы определять то, переключается или нет средство поддержания остановки транспортного средства с крутящего момента электромотора на фрикционную тормозную силу фрикционных тормозов 12. Когда предыдущее значение флага переключения равно 1, контроллер 2 электромотора выполняет процесс на этапе S1606, чтобы поддерживать состояние остановки транспортного средства посредством фрикционных тормозов 12.
[0165] На этапе S1604, контроллер 2 электромотора определяет то, равно или меньше либо нет потребление мощности электромотора 4 в качестве индекса, показывающего состояние транспортного средства, порогового значения TP_th. Пороговое значение TP_th задается таким образом, чтобы сокращать затраты на электричество, и вследствие этого повышение температуры электромотора посредством увеличения потребления мощности имеет достаточный допустимый запас относительно температуры охватывания теплового ограничения. Когда потребление мощности равно или меньше порогового значения TP_th, контроллер 2 электромотора выполняет процесс на этапе S1605. Когда потребление мощности превышает пороговое значение TP_th, контроллер 2 электромотора выполняет процесс на этапе S1606.
[0166] На этапе S1605, переключение на фрикционные тормоза не является необходимостью с точки зрения аспекта пусковых качеств, поскольку потребление мощности является небольшим на низком градиенте и т.п., и влияние затрат на электричество и тепловое ограничение посредством повышения температуры электромотора является небольшим. Таким образом, контроллер 2 электромотора задает флаг переключения равным 0.
[0167] На этапе S1606, переключение на фрикционные тормоза является необходимостью с точки зрения аспекта затрат на электричество и теплового ограничения для электромотора, поскольку потребление мощности является большим. Таким образом, контроллер 2 электромотора задает флаг переключения равным 1.
[0168] На этапе S1607, контроллер 2 электромотора сохраняет флаг переключения, заданный на этапе S1605 или этапе S1606, равным предыдущему значению флага переключения.
[0169] Как описано выше, устройство управления для электротранспортного средства в четвертом варианте осуществления выполняет управление таким образом, что величина фрикционного торможения фрикционных тормозов 12 сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктирует крутящему моменту электромотора сходиться почти к 0, когда частота ωm вращения электромотора становится почти равной 0, и потребление мощности равно или превышает предварительно определенное пороговое значение TP_th. Это позволяет обеспечивать плавное трогание с места при остановке транспортного средства посредством крутящего момента электромотора без переключения на фрикционные тормоза в окружении, в котором потребление мощности электромотора является небольшим, чтобы уменьшать влияние на затраты на электричество, например, на дороге с низким градиентом.
[0170] Настоящее изобретение не ограничено вышеописанным одним вариантом осуществления, и возможны различные модификации и варианты применения. Например, вышеприведенное пояснение описывает то, что когда рабочая величина нажатия педали акселератора равна или меньше предварительно определенного значения, и электротранспортное средство находится в момент времени непосредственно перед остановкой, значение Tm* команды управления крутящим моментом электромотора сходится к оцененному значению Td возмущающего крутящего момента (или 0) в сочетании с уменьшением частоты вращения электромотора 4. Тем не менее, поскольку параметры скорости/частоты вращения, такие как скорость вращения колес, скорость кузова транспортного средства и частота вращения ведущего вала, находятся в пропорциональной взаимосвязи с частотой вращения электромотора 4, значение Tm* команды управления крутящим моментом электромотора может сходиться к оцененному значению Td возмущающего крутящего момента (или 0) в сочетании с уменьшением параметра скорости/частоты вращения, который является пропорциональным частоте вращения электромотора 4.
[0171] Вышеприведенное пояснение описывает фрикционные тормоза 12, которые действуют на ведущие колеса 9a и 9b в качестве конфигурации, которая функционирует в качестве узла фрикционного торможения; тем не менее, она не обязательно ограничена этим. Например, конфигурация, которая функционирует в качестве узла фрикционного торможения, может представлять собой тормоз вала, который действует на вращение ведущего вала 8.
[0172] Данная заявка притязает на приоритет заявки на патент (Япония) № 2015-167173, поданной в патентное бюро (Япония) 26 августа 2015 года, содержимое которой полностью содержится в этом описании изобретения по ссылке.
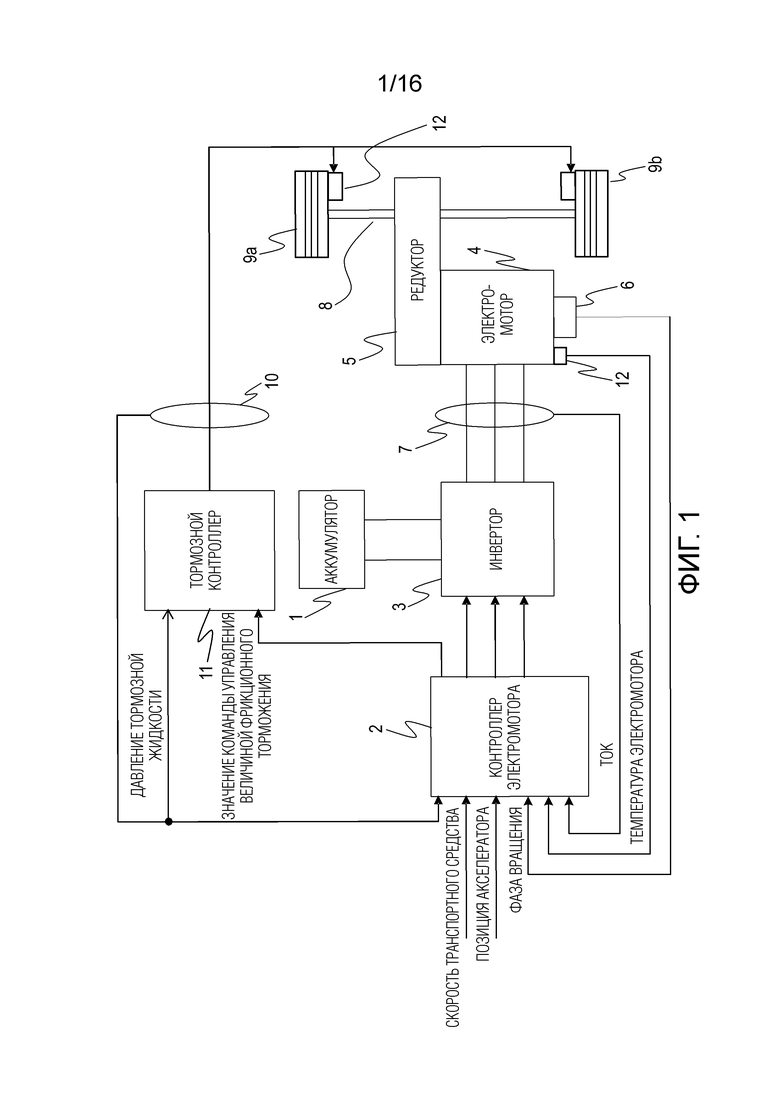
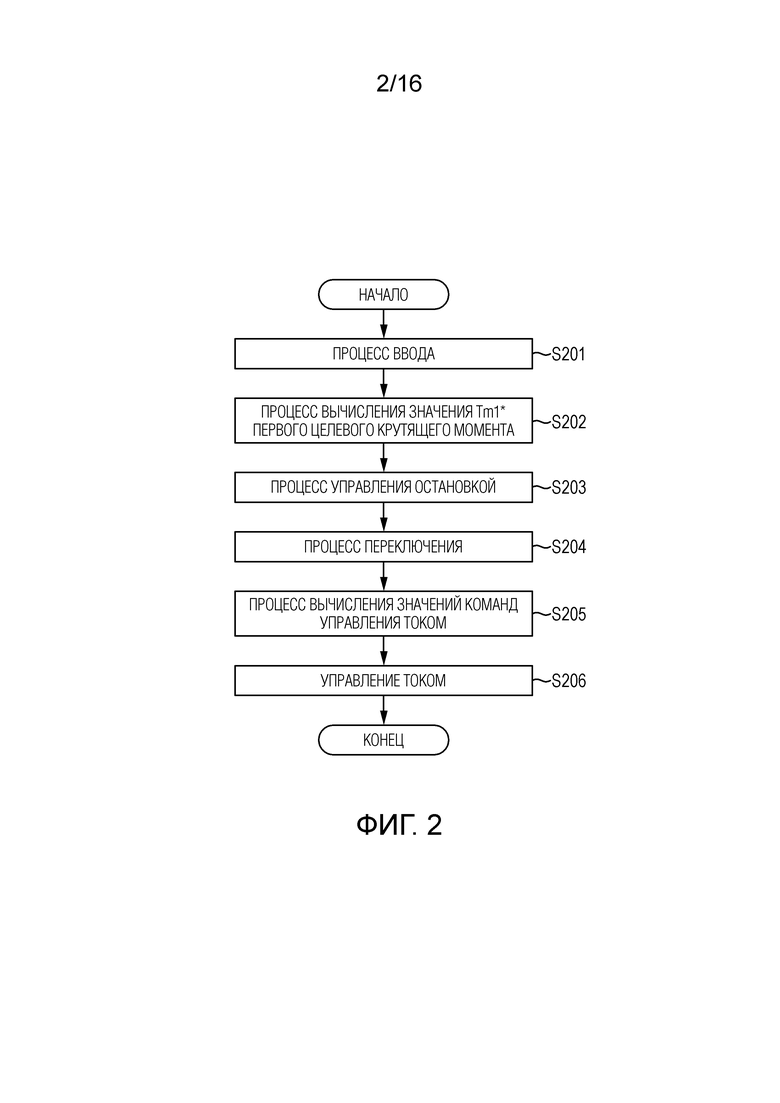
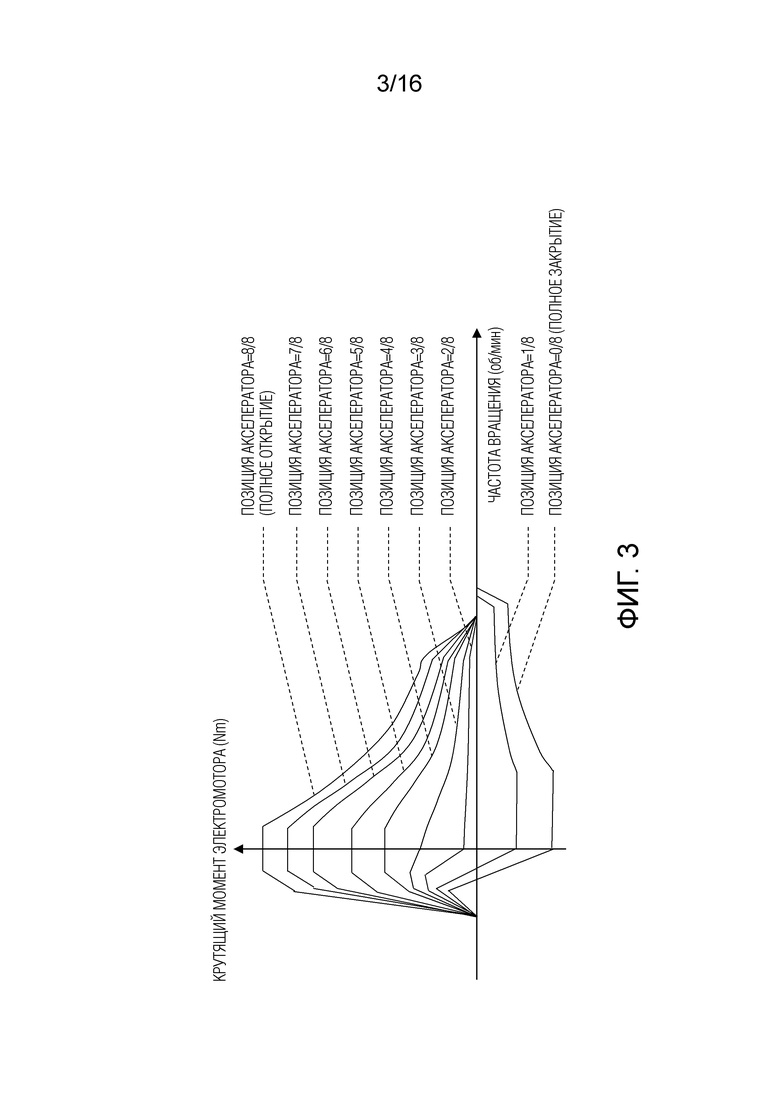
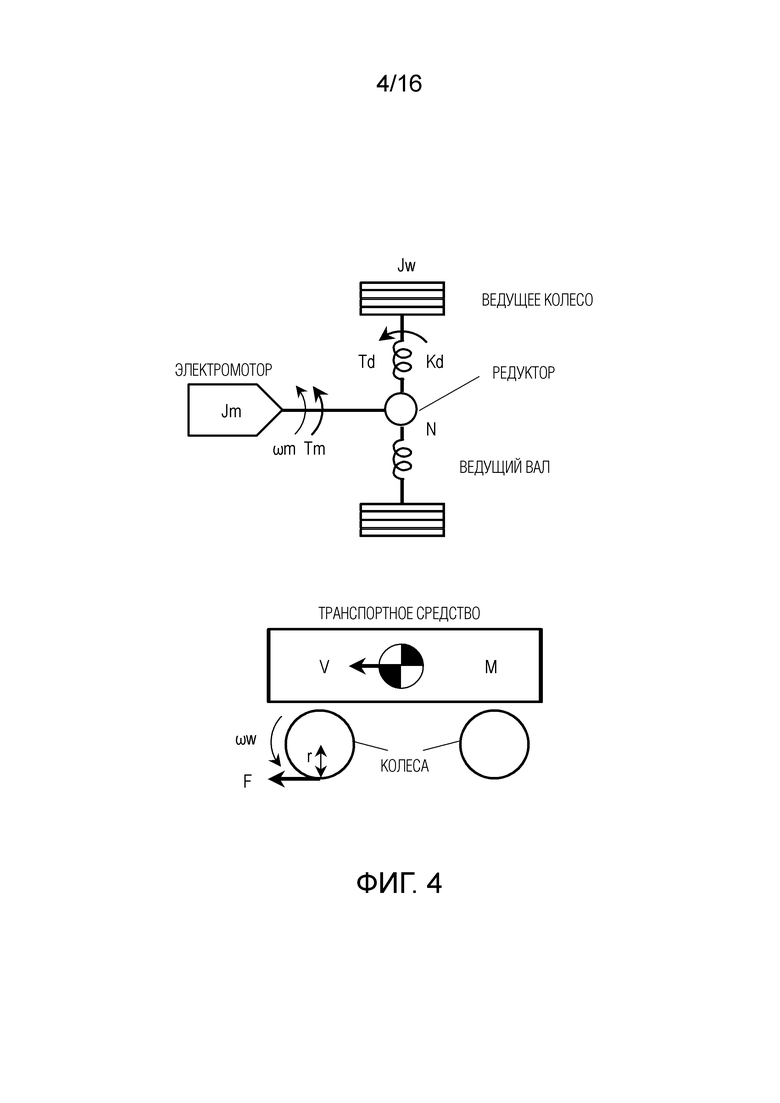
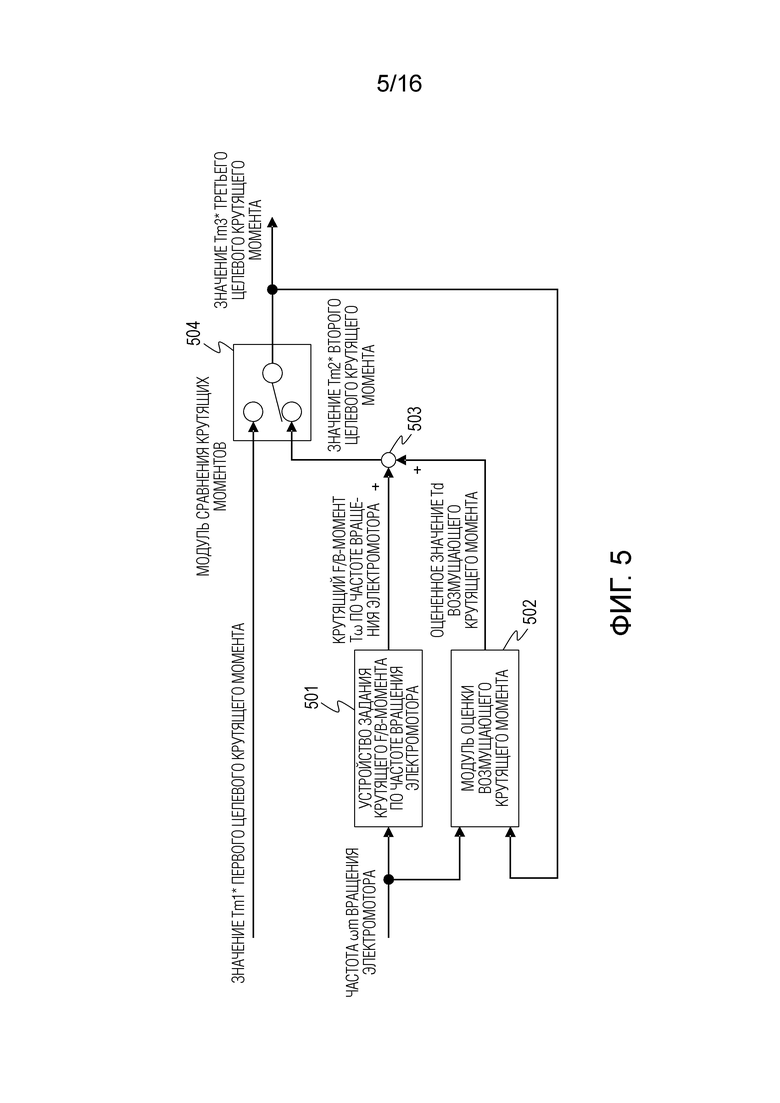
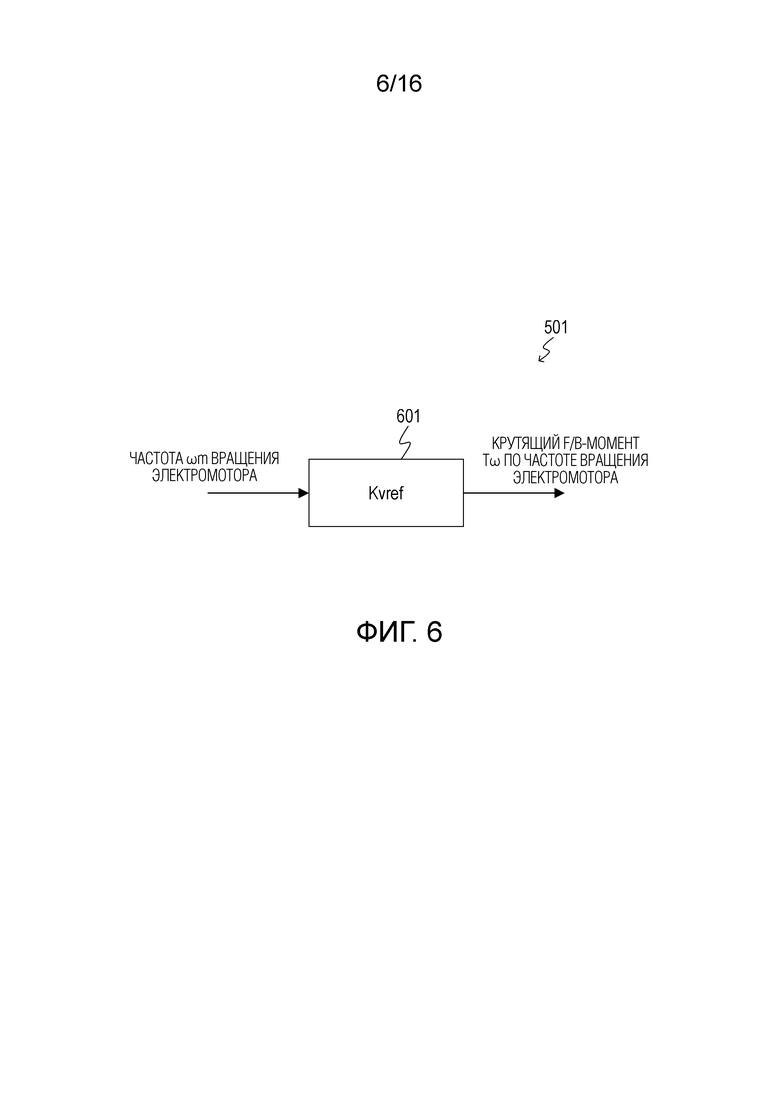
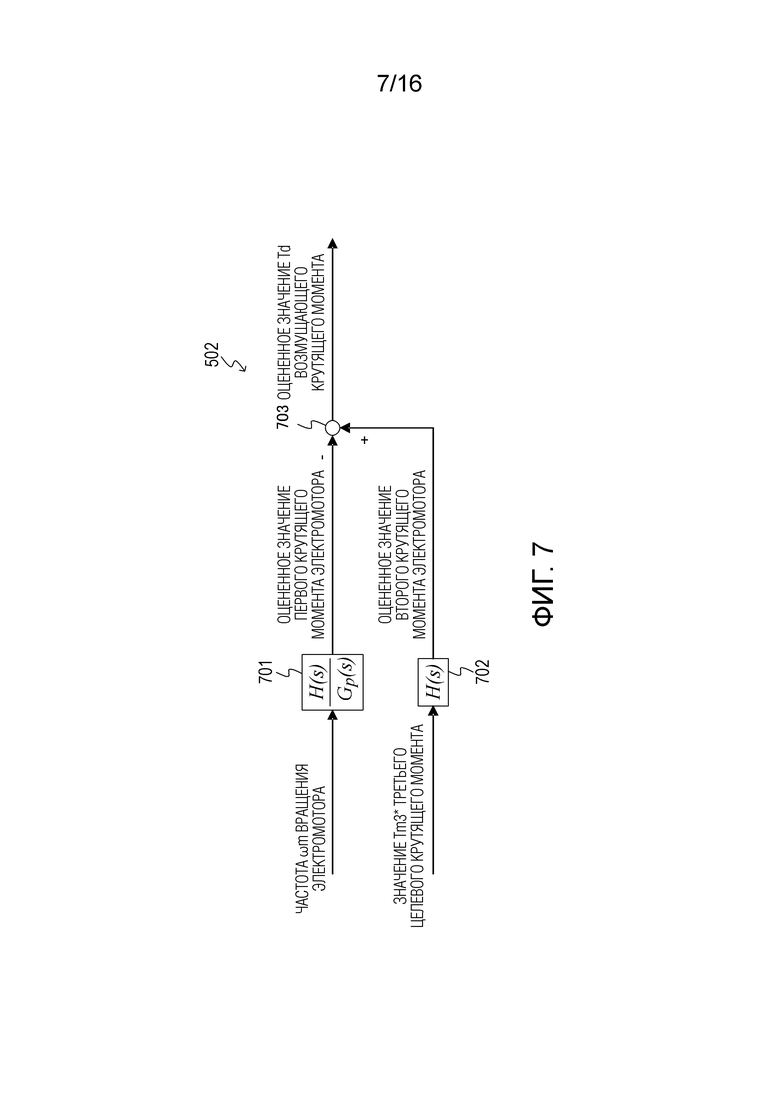
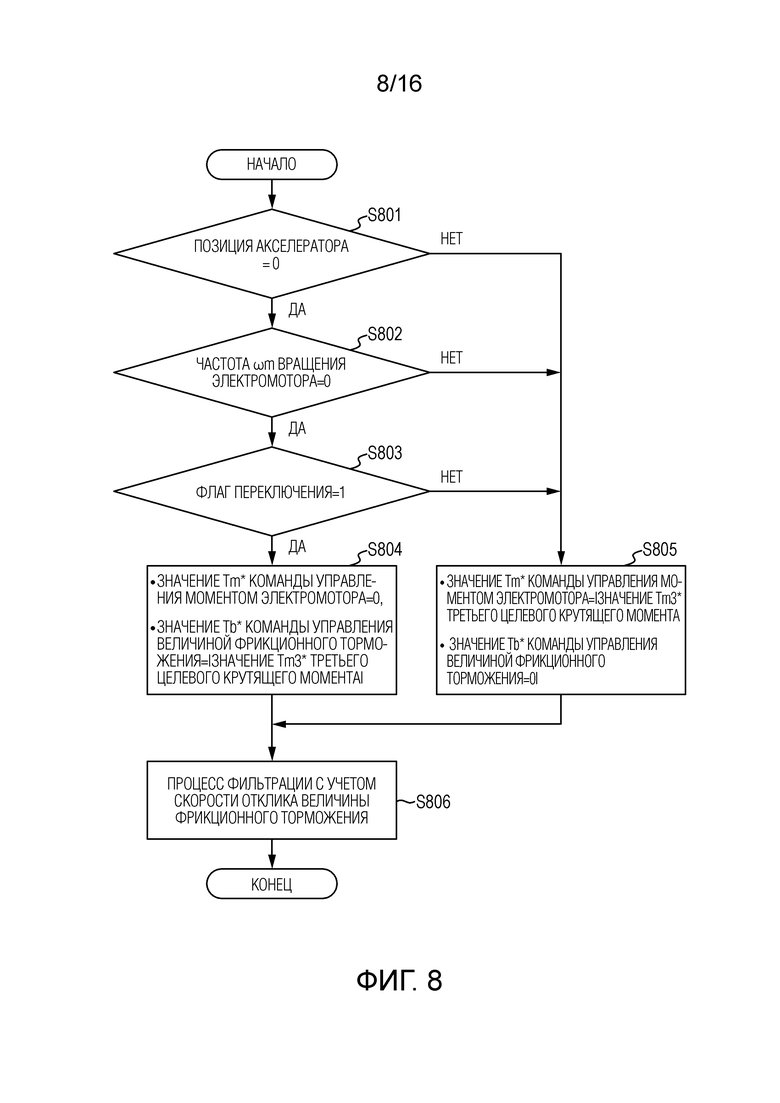
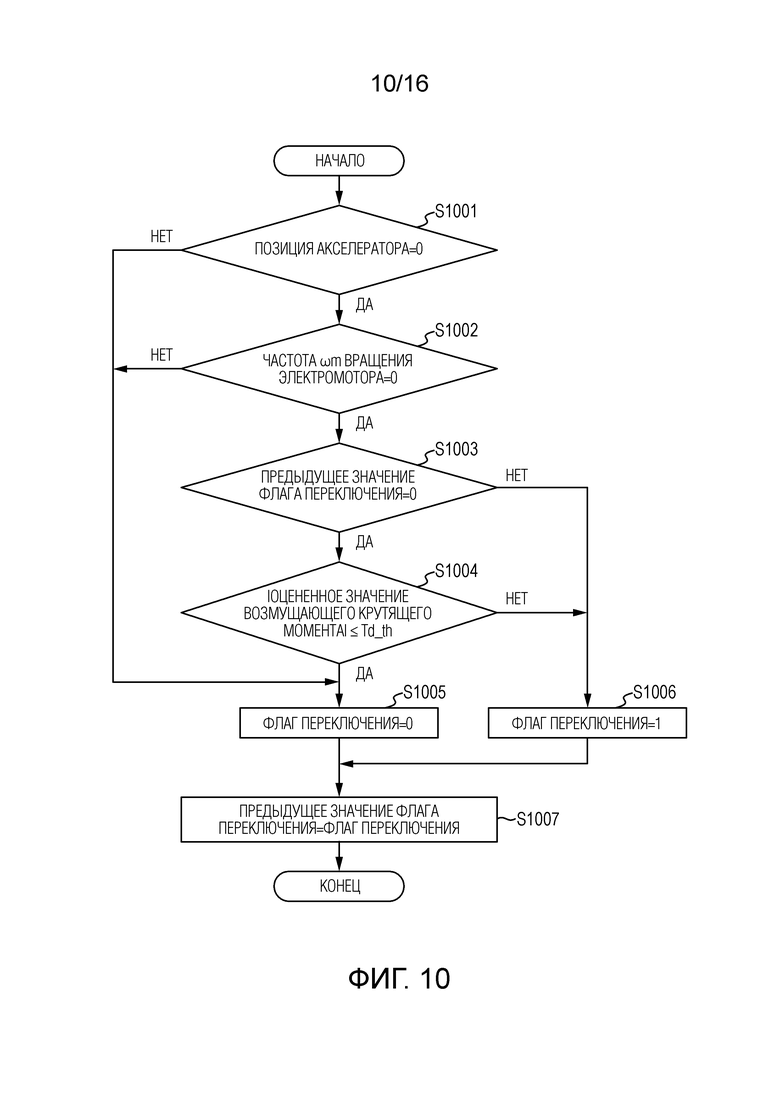
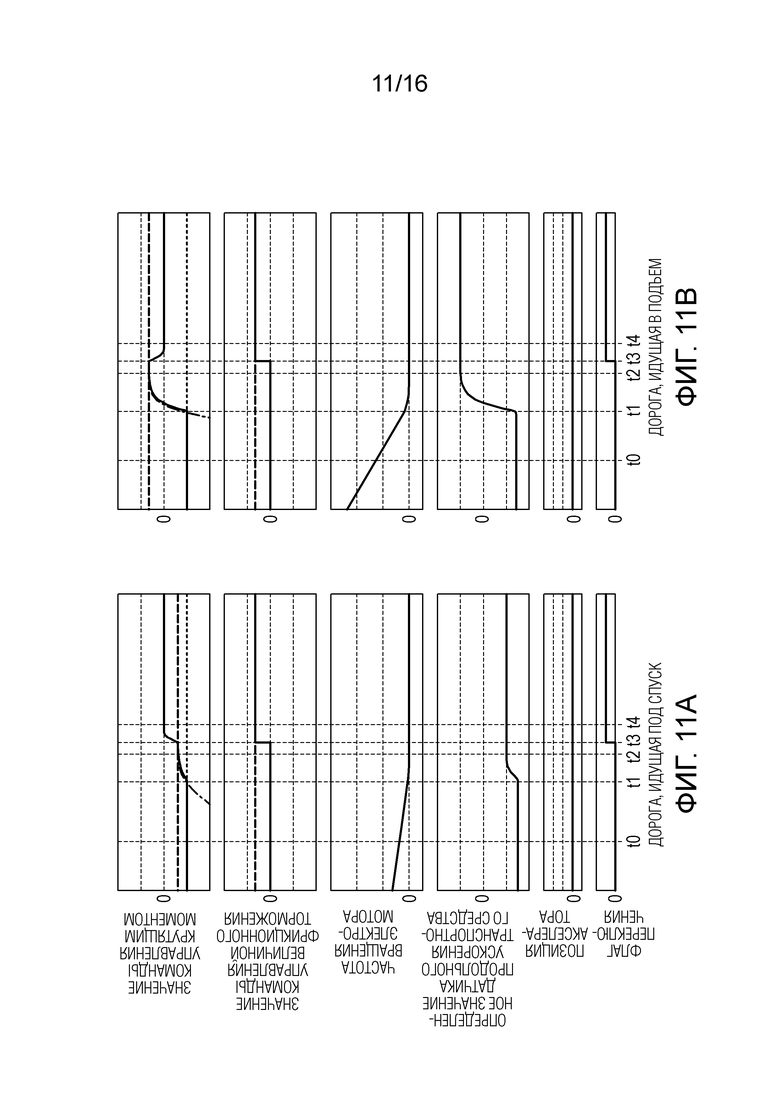
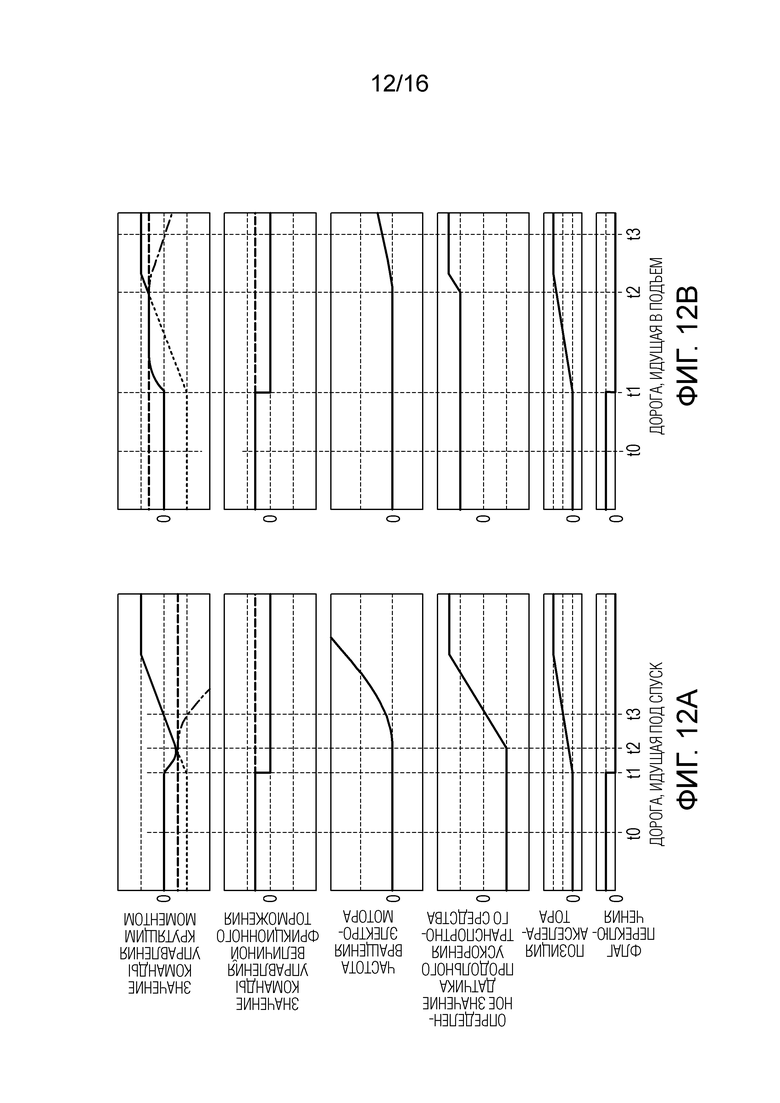
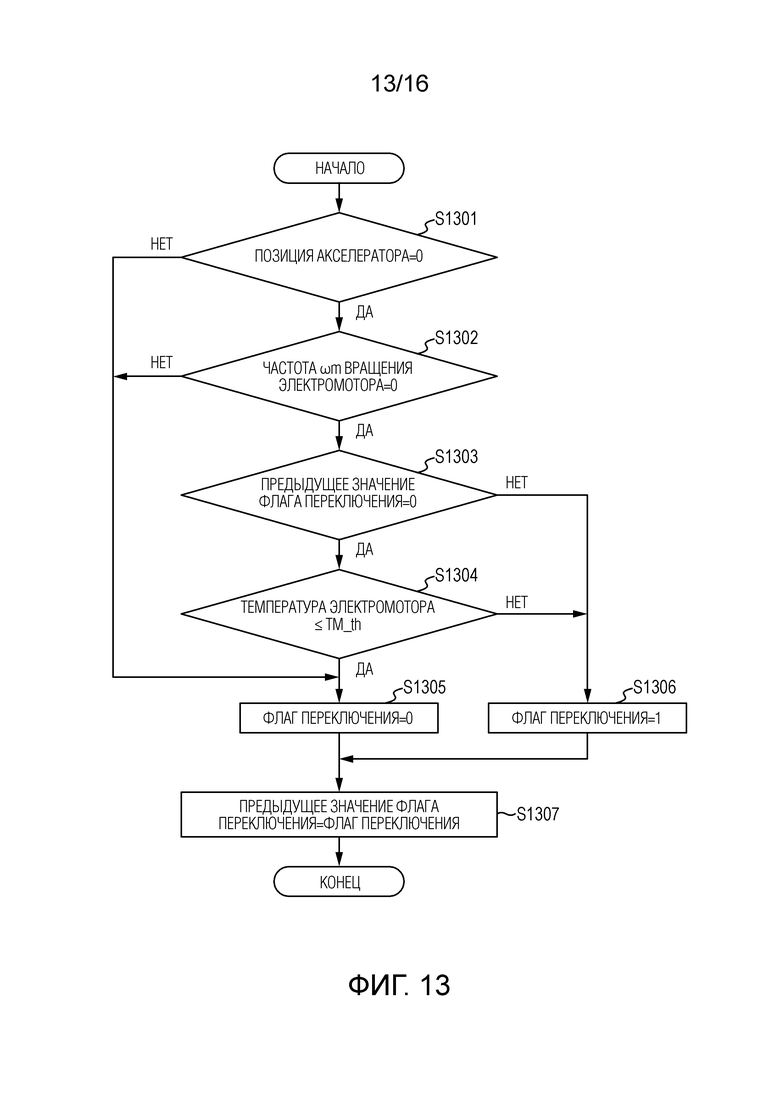
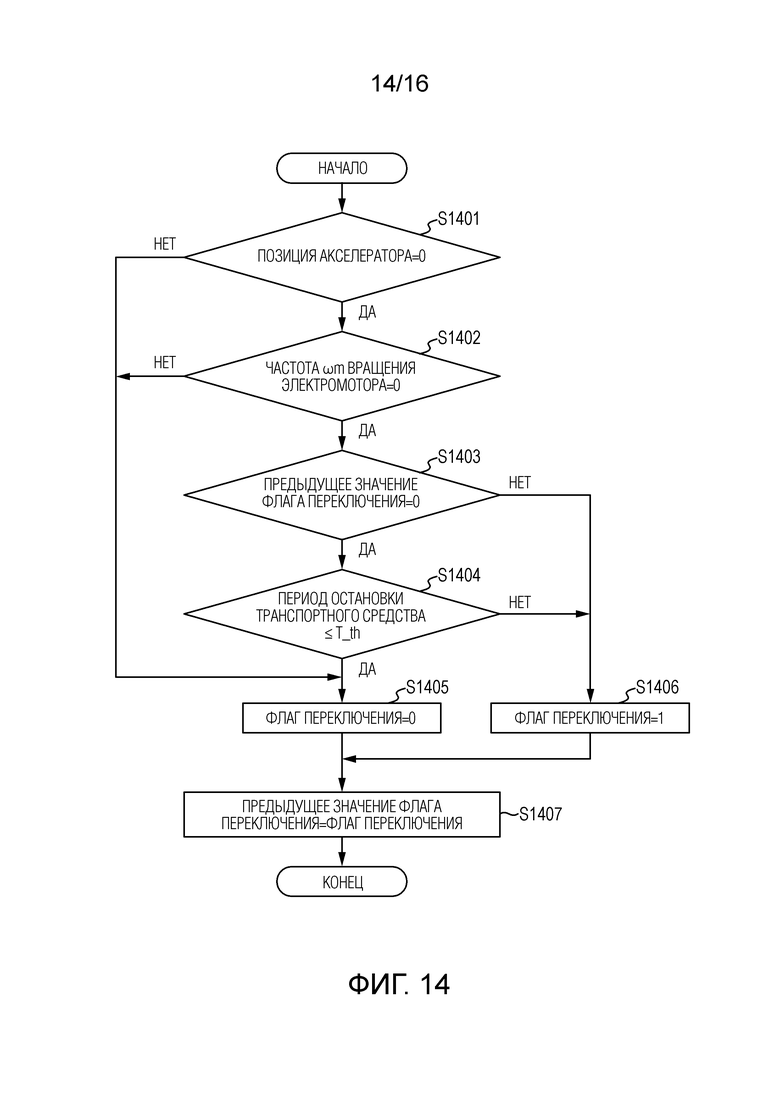
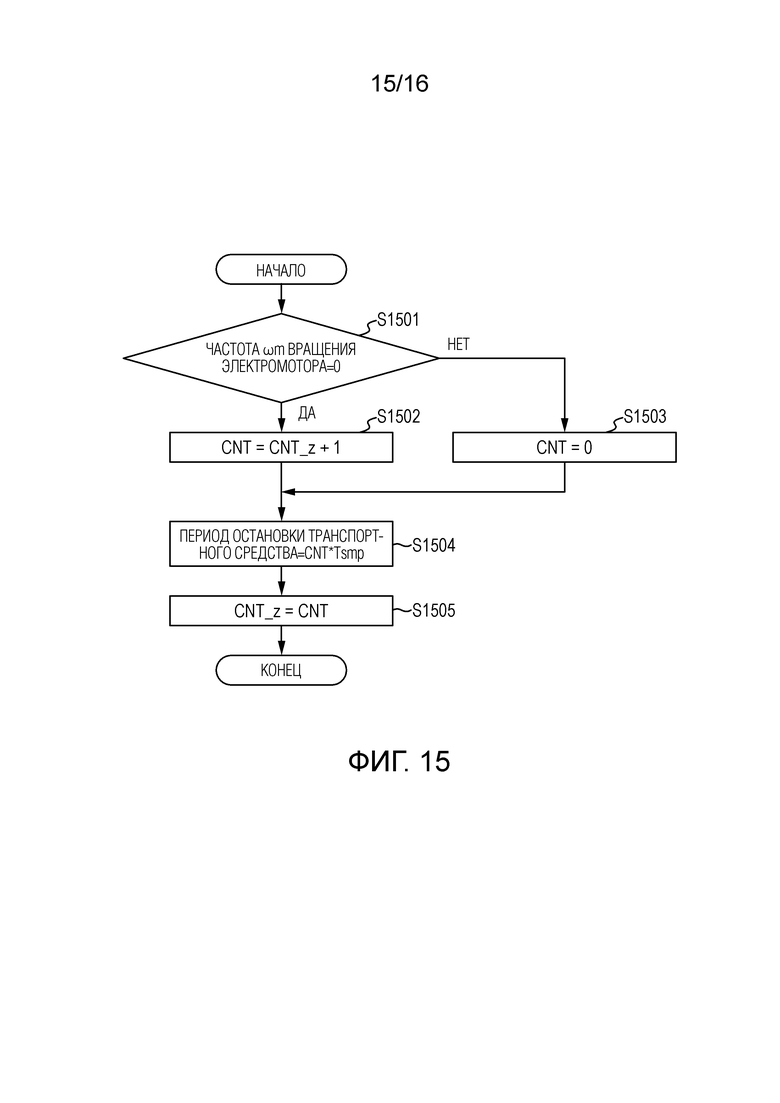
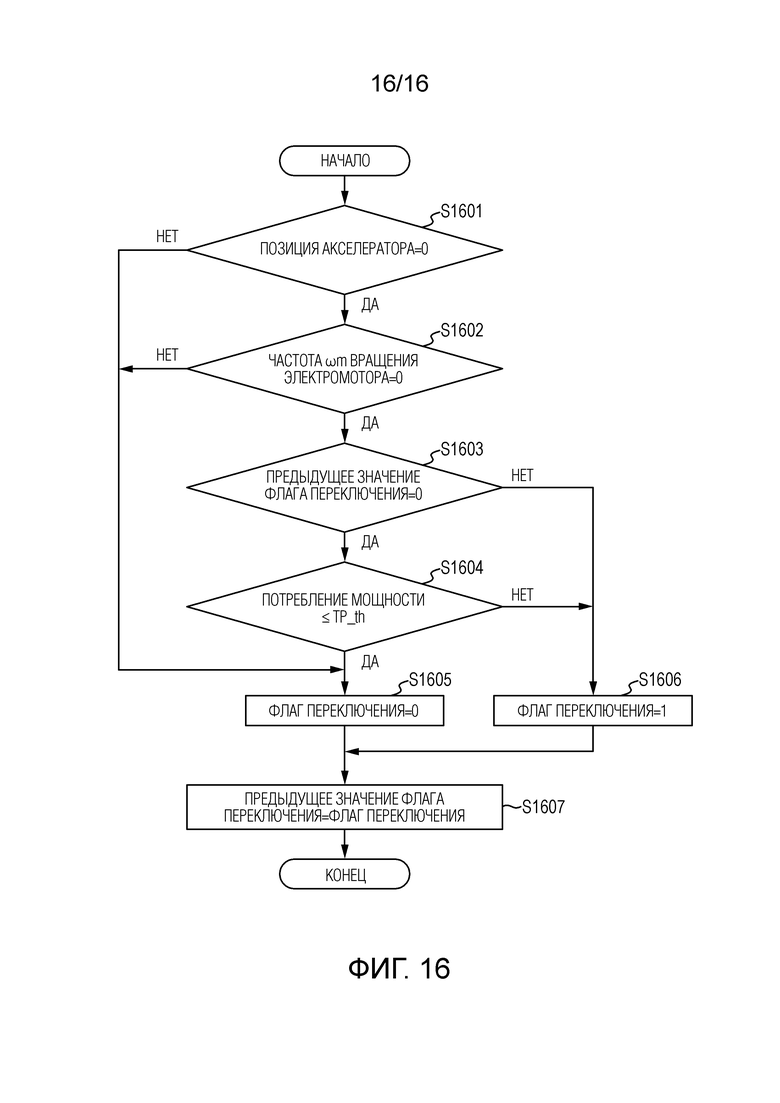
Группа изобретений относится к способу и устройству управления торможением для электротранспортного средства. Электротранспортное средство включает в себя: электромотор и узел фрикционного торможения. Электромотор функционирует в качестве источника приведения в движение и предоставляет рекуперативную тормозную силу в транспортное средство. Узел фрикционного торможения предоставляет фрикционную тормозную силу в транспортное средство. При этом способ управления содержит этапы, на которых: определяют параметр скорости/частоты вращения, пропорциональный скорости движения транспортного средства; оценивают возмущающий крутящий момент, который действует на электромотор; выполняют управление таким образом, что крутящий момент электромотора сходится к оцененному значению возмущающего крутящего момента по мере того, как параметр скорости/частоты вращения уменьшается; выполняют управление таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктируют крутящему моменту электромотора сходиться почти к 0, когда параметр скорости/частоты вращения становится почти равным 0, и определяется то, что транспортное средство находится в состоянии остановки. Достигается создание системы направленной на повышение энергоэффективности электротранспорта посредством управления ускорением/замедлением и остановкой транспортного средства. 2 н. и 10 з.п. ф-лы, 18 ил.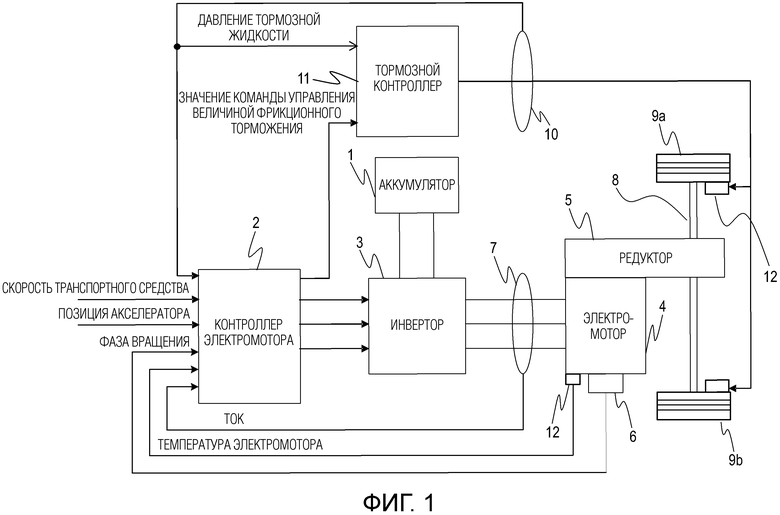
1. Способ управления торможением для электротранспортного средства, включающего в себя электромотор, который функционирует в качестве источника приведения в движение и предоставляет рекуперативную тормозную силу в транспортное средство, и узел фрикционного торможения, который предоставляет фрикционную тормозную силу в транспортное средство, при этом способ управления содержит этапы, на которых:
- определяют параметр скорости/частоты вращения, пропорциональный скорости движения транспортного средства;
- оценивают возмущающий крутящий момент, который действует на электромотор;
- выполняют управление таким образом, что крутящий момент электромотора сходится к оцененному значению возмущающего крутящего момента по мере того, как параметр скорости/частоты вращения уменьшается; и
- выполняют управление таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктируют крутящему моменту электромотора сходиться почти к 0, когда параметр скорости/частоты вращения становится почти равным 0, и определяется то, что транспортное средство находится в состоянии остановки.
2. Способ управления для электротранспортного средства по п. 1, в котором:
- значение, к которому принудительно сходится величина фрикционного торможения, равно или превышает разность между оцененным значением возмущающего крутящего момента и крутящим моментом электромотора.
3. Способ управления для электротранспортного средства по п. 1 или 2, в котором:
- темп изменения крутящего момента электромотора, когда крутящий момент электромотора принудительно сходится к предварительно определенному значению, регулируется согласно задержке отклика относительно значения команды управления величины фрикционного торможения.
4. Способ управления для электротранспортного средства по п. 1, содержащий этапы, на которых:
- задают значение первого целевого крутящего момента на основе информации касательно транспортного средства;
- задают значение второго целевого крутящего момента, которое сходится к оцененному значению возмущающего крутящего момента по мере того, как параметр скорости/частоты вращения уменьшается;
- сравнивают значение первого целевого крутящего момента со значением второго целевого крутящего момента, чтобы задавать большее значение в качестве значения третьего целевого крутящего момента; и
- инструктируют крутящему моменту электромотора сходиться к значению третьего целевого крутящего момента и инструктируют величине фрикционного торможения сходиться к 0, когда электротранспортное средство трогается с места из состояния, которое поддерживает состояние остановки транспортного средства посредством величины фрикционного торможения.
5. Способ управления для электротранспортного средства по п. 4, в котором:
- темп изменения крутящего момента электромотора, когда крутящий момент электромотора принудительно сходится к значению третьего целевого крутящего момента, регулируется согласно задержке отклика относительно значения команды управления величины фрикционного торможения.
6. Способ управления для электротранспортного средства по п. 1, содержащий этап, на котором:
- когда параметр скорости/частоты вращения становится почти равным 0, и параметр, который представляет собой индекс, показывающий состояние транспортного средства, и отличающийся от параметра скорости/частоты вращения, равен или превышает предварительно определенное значение, выполняют управление таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктируют крутящему моменту электромотора сходиться почти к 0.
7. Способ управления для электротранспортного средства по п. 6, в котором:
- параметр представляет собой оцененное значение возмущающего крутящего момента, который действует на электромотор, и
- когда параметр скорости/частоты вращения становится почти равным 0, и оцененное значение возмущающего крутящего момента равно или превышает предварительно определенное пороговое значение, способ управления выполняет управление таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктирует крутящему моменту электромотора сходиться почти к 0.
8. Способ управления для электротранспортного средства по п. 6, содержащий этапы, на которых:
- определяют температуру электромотора в качестве параметра, и
- когда параметр скорости/частоты вращения становится почти равным 0, и температура электромотора равна или превышает предварительно определенное пороговое значение, выполняют управление таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктируют крутящему моменту электромотора сходиться почти к 0.
9. Способ управления для электротранспортного средства по п. 6, содержащий этапы, на которых:
- вычисляют период остановки транспортного средства для электротранспортного средства в качестве параметра,
- когда параметр скорости/частоты вращения становится почти равным 0, и период остановки транспортного средства равен или превышает предварительно определенное пороговое значение, выполняют управление таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктируют крутящему моменту электромотора сходиться почти к 0.
10. Способ управления для электротранспортного средства по п. 6, содержащий этапы, на которых:
- вычисляют потребление мощности электромотора в качестве параметра, и
- когда параметр скорости/частоты вращения становится почти равным 0, и потребление мощности равно или превышает предварительно определенное пороговое значение, выполняют управление таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и инструктируют крутящему моменту электромотора сходиться почти к 0.
11. Способ управления для электротранспортного средства по любому из пп. 6-10, содержащий этапы, на которых:
- определяют рабочую величину нажатия педали акселератора, которая представляет собой рабочее состояние педали акселератора, и
- когда управление выполняется таким образом, что величина фрикционного торможения узла фрикционного торможения сходится к значению, определенному на основе оцененного значения возмущающего крутящего момента, и крутящий момент электромотора сходится почти к 0, поддерживают состояние, в котором величина фрикционного торможения сходится к возмущающему крутящему моменту до тех пор, пока не будет увеличена рабочая величина нажатия педали акселератора.
12. Устройство управления торможением для электротранспортного средства, включающего в себя электромотор, который функционирует в качестве источника приведения в движение и предоставляет рекуперативную тормозную силу в транспортное средство, и узел фрикционного торможения, который предоставляет фрикционную тормозную силу в транспортное средство, причем устройство управления содержит:
- детектор параметров скорости/частоты вращения, выполненный с возможностью определять параметр скорости/частоты вращения, пропорциональный скорости движения электротранспортного средства;
- модуль оценки возмущающего крутящего момента, выполненный с возможностью оценивать возмущающий крутящий момент, который действует на электромотор;
- узел фрикционного торможения, выполненный с возможностью предоставлять фрикционную тормозную силу в электротранспортное средство;
- контроллер величины фрикционного торможения, выполненный с возможностью управлять величиной фрикционного торможения узла фрикционного торможения; и
- контроллер крутящего момента электромотора, выполненный с возможностью управлять крутящим моментом электромотора, при этом:
- когда параметр скорости/частоты вращения становится почти равным 0, и определяется то, что транспортное средство находится в состоянии остановки транспортного средства, узел регулирования величины фрикционного торможения инструктирует величине фрикционного торможения электрически сходиться к значению, определенному на основе оцененного значения возмущающего крутящего момента, и контроллер крутящего момента электромотора инструктирует крутящему моменту электромотора сходиться почти к 0.
| JP H0879907 A, 22.03.1996 | |||
| JP 2015133799 A, 23.07.2015 | |||
| JP2008306815 A, 18.12.2008 | |||
| DE 102006057065 A1, 05.06.2008 | |||
| US 2005017580 A1, 27.01.2005. |

