Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для электрического транспортного средства и к способу управления для электрического транспортного средства.
Уровень техники
[0002] Традиционно, в электрическом транспортном средстве, которое включает в себя электрическую машину в качестве источника приведения в движение, известна технология, в которой, когда водитель отпускает педаль акселератора, тормозная сила формируется посредством рекуперации электрической машины, чтобы замедлять или останавливать транспортное средство (см. JP2012-29461A).
[0003] В этой технологии, в то время как тормозная сила посредством рекуперации электрической машины используется для замедления или остановки транспортного средства, механическая тормозная сила, к примеру, из парковочного тормоза, используется для поддержания остановки без тормозной силы от электрической машины, аналогично общему транспортному средству, после того, как транспортное средство переключается в режим парковки, чтобы выключать сигнал переключателя зажигания. После этого, когда сигнал переключателя зажигания снова переходит во включенное состояние, и выполняется операция трогания с места транспортного средства, электрическая машина формирует возмущающий крутящий момент, соответствующий возмущениям, которые действуют на транспортное средство, в силу чего остановка транспортного средства поддерживается.
Сущность изобретения
[0004] Тем не менее, в традиционной технологии, возмущающий крутящий момент повышается после того, как выполняется операция трогания с места транспортного средства, и после этого начинается торможение. Затем до тех пор, пока возмущающий крутящий момент, соответствующий возмущениям, действующим на транспортное средство, не формируется, возникает такая проблема, что происходит сползание транспортного средства, в частности, на дороге с уклоном.
[0005] Цель настоящего изобретения заключается в том, чтобы предоставлять технологию для уменьшения сползания транспортного средства, которое возникает, в частности, на дороге с уклоном сразу после того, как выполняется операция трогания с места транспортного средства.
[0006] Устройство управления для электрического транспортного средства согласно варианту осуществления имеет электромотор, который формирует крутящий момент приведения в движение и рекуперативный крутящий момент, соответствующий операции нажатия педали акселератора водителем. Устройство управления для электрического транспортного средства для электрического транспортного средства определяет то, выполнена или нет операция трогания с места транспортного средства водителем, вычисляет оцененное значение Td возмущающего крутящего момента, необходимое для поддержания состояния остановки транспортного средства, соответствующего возмущениям, действующим на транспортное средство, и осуществляет управление таким образом, что крутящий момент приведения в движение электромотора сходится к оцененному значению Td возмущающего крутящего момента, когда транспортное средство определяется как находящееся в момент времени непосредственно перед остановкой транспортного средства в ходе движения, или определяется как находящееся в ходе операции трогания с места. Затем устройство управления для электрического транспортного средства управляет скоростью отклика крутящего момента приведения в движение на возмущения, действующие на транспортное средство, и увеличивает скорость отклика крутящего момента приведения в движение электромотора по сравнению со скоростью отклика крутящего момента приведения в движение непосредственно перед остановкой транспортного средства, когда операция трогания с места определяется как выполняемая.
[0007] Далее подробно описываются варианты осуществления настоящего изобретения с прилагаемыми чертежами.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электрического транспортного средства с устройством управления для электрического транспортного средства в первом варианте осуществления.
Фиг. 2 является последовательностью операций процессов для управления током электромотора, выполняемых посредством контроллера электромотора, содержащего устройство управления для электрического транспортного средства по первому варианту осуществления.
Фиг. 3 является схемой, иллюстрирующей примерную таблицу позиций акселератора (степеней открытия акселератора) и крутящих моментов.
Фиг. 4 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства.
Фиг. 5 является блок-схемой для осуществления процесса управления остановкой.
Фиг. 6 является схемой, описывающей способ для вычисления крутящего F/B-момента Tω по частоте вращения электромотора на основе частоты ωm вращения электромотора.
Фиг. 7 является схемой, описывающей способ для вычисления оцененного значения Td возмущающего крутящего момента.
Фиг. 8 является блок-схемой, описывающей процесс управления остановкой посредством устройства управления для электрического транспортного средства в вариантах осуществления настоящего изобретения.
Фиг. 9 является блок-схемой, описывающей процесс управления остановкой посредством устройства управления для электрического транспортного средства в первом варианте осуществления.
Фиг. 10 является последовательностью операций процесса первоначального трогания с места, выполняемого посредством контроллера электромотора, содержащего устройство управления для электрического транспортного средства в первом варианте осуществления.
Фиг. 11 является последовательностью операций обработки для задания управляющих параметров, выполняемых в ходе процесса первоначального трогания с места.
Фиг. 12 является схемой, иллюстрирующей примерный результат управления посредством устройства управления для электрического транспортного средства в первом варианте осуществления.
Фиг. 13 является схемой, иллюстрирующей примерный результат управления посредством сравнительного примера.
Фиг. 14 является последовательностью операций процесса первоначального трогания с места, выполняемого посредством контроллера электромотора, содержащего устройство управления для электрического транспортного средства во втором варианте осуществления.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электрического транспортного средства с устройством управления для электрического транспортного средства в первом варианте осуществления. Устройство управления для электрического транспортного средства в первом варианте осуществления является применимым к электрическим транспортным средствам, приводимым в движение посредством электромоторов. Электрические транспортные средства включают в себя не только электрические транспортные средства, которые имеют только электромотор в качестве источника приведения в движение, но также и гибридные транспортные средства, которые имеют электромотор и двигатель в качестве источника приведения в движение. В частности, устройство управления для электрического транспортного средства согласно варианту осуществления является применимым к транспортному средству, допускающему управление ускорением/замедлением и остановкой только посредством операции нажатия педали акселератора. Водитель, осуществляющий вождение транспортным средством, увеличивает позицию акселератора в ходе ускорения и уменьшает позицию акселератора или задает позицию акселератора нулевой в ходе замедления или в ходе остановки. Тем не менее, на дороге, идущей в подъем, иногда возникает случай, в котором транспортное средство переходит в остановленное состояние при увеличении позиции акселератора для предотвращения отката назад транспортного средства.
[0010] Контроллер 2 электромотора (в дальнейшем называемый просто "контроллером 2") принимает вводы сигналов, указывающих режим работы транспортного средства, например, сигнала переключателя зажигания, скорости V транспортного средства, позиции AP акселератора, фазы α вращения электромотора 4 (электромотора трехфазного переменного тока) и токов iu, iv и iw электромотора 4. Контроллер 2 формирует PWM-сигнал для управления электромотором 4 на основе входных сигналов. Контроллер 2 использует сформированный PWM-сигнал для того, чтобы выполнять управление размыканием/замыканием переключающего элемента инвертора 3. Контроллер 2 имеет функцию, которая заставляет постоянный ток, поданный в инвертор 3 и электромотор 4 из аккумулятора 1, передаваться, когда сигнал зажигания включен, и прерываться, когда сигнал зажигания отключен.
[0011] Контроллер 2 имеет функции в качестве средства определения трогания с места, которое определяет то, удовлетворяются или нет условия трогания с места, описанные далее, средства оценки возмущающего крутящего момента, которое оценивает возмущающий крутящий момент, описанный далее, средства управления крутящим моментом, которое управляет крутящим моментом электромотора (крутящим моментом приведения в движение) таким образом, что он сходится к оцененному значению возмущающего крутящего момента, и средства управления скоростью отклика, которое управляет скоростью отклика крутящего момента приведения в движение на возмущения, действующие на транспортное средство. Контроллер 2 имеет функцию в качестве средства регулирования скорости отклика крутящего момента, которое может варьировать скорость отклика (скорость отклика фактического крутящего момента на возмущения) крутящего момента электромотора на возмущения, более конкретно, высокую скорость отклика, которая заставляет оцененное значение возмущающего крутящего момента сходиться к возмущениям вследствие уклона, при управлении крутящим моментом электромотора, соответствующем состоянию транспортного средства.
[0012] Инвертор 3 включает/отключает, например, два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT и MOSFET), включенные для каждой фазы, чтобы преобразовывать постоянный ток, поданный из аккумулятора 1, в переменный ток, и заставляет требуемый ток протекать в электромотор 4.
[0013] Электромотор 4 формирует движущую силу посредством переменного тока, подаваемого из инвертора 3, и передает движущую силу на правое и левое ведущие колеса 9a, 9b через редуктор 5 и ведущий вал 8. Дополнительно, при вращении согласно вращению ведущих колес 9a, 9b в ходе движения транспортного средства, электромотор 4 формирует рекуперативную движущую силу, в силу этого собирая кинетическую энергию транспортного средства в качестве электроэнергии. В этом случае, инвертор 3 преобразует переменный ток, сформированный во время работы в рекуперативном режиме электромотора 4, в постоянный ток и подает постоянный ток в аккумулятор 1.
[0014] Датчик 7 тока определяет трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4. Следует отметить, что поскольку сумма трехфазных переменных токов iu, iv и iw равна 0, токи двух произвольных фаз могут определяться, и ток оставшейся одной фазы может получаться посредством вычисления.
[0015] Датчик 6 вращения, например, представляет собой круговой датчик позиции или датчик позиции и определяет фазу α вращения электромотора 4.
[0016] Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки для управления током электромотора, выполняемых посредством контроллера 2. Процессы для управления током электромотора всегда выполняются с постоянными интервалами в течение периода, когда активируется система транспортного средства.
[0017] На этапе S201, сигналы, указывающие состояния транспортного средства, вводятся в контроллер 2. Здесь, вводятся скорость V транспортного средства (км/ч), позиция AP акселератора (%), фаза α вращения (рад) электромотора 4, частота Nm вращения (об/мин) электромотора 4, трехфазные переменные токи iu, iv и iw, протекающие в электромоторе 4, значение Vdc постоянного напряжения (В) аккумулятора 1 и сигнал переключателя зажигания. Значение Tm1* первого целевого крутящего момента и значение Tm2* второго целевого крутящего момента, которые вычисляются в процессе управления по току один цикл до этого, вводятся в качестве предыдущего значения Tm1_z значения Tm1 первого целевого крутящего момента и предыдущего значения Tm2_z значения Tm2 второго целевого крутящего момента.
[0018] Скорость V транспортного средства (км/ч) получается посредством датчика скорости транспортного средства (не проиллюстрирован) или через связь из другого контроллера. Альтернативно, контроллер 2 умножает механическую угловую скорость ωm вращения на динамический радиус R шины и делит произведение на передаточное отношение главной шестерни, чтобы получать скорость v транспортного средства (м/с), и умножает произведение на 3600/1000 для преобразования единиц измерения, за счет этого получая скорость V транспортного средства (км/ч).
[0019] Контроллер 2 получает позицию AP акселератора (%) из датчика 11 позиции акселератора (средства определения позиции акселератора). Позиция AP акселератора (%) может получаться через связь из другого контроллера, такого как контроллер транспортного средства (не проиллюстрирован).
[0020] Фаза α вращения (рад) электромотора 4 получается из датчика 6 вращения. Частота Nm вращения (об/мин) электромотора 4 получается посредством деления угловой скорости ω вращения (электрического угла) на номер p полюсной пары электромотора 4, чтобы получать частоту ωm вращения электромотора (рад/с), которая представляет собой механическую угловую скорость электромотора 4, и умножения полученной частоты ωm вращения электромотора на 60/(2π). Угловая скорость ω вращения получается посредством дифференцирования фазы α вращения. Датчик 6 вращения имеет функцию в качестве средства определения параметров скорости/частоты вращения.
[0021] Токи iu, iv и iw(а), протекающие в электромоторе 4, получаются из датчика 7 тока.
[0022] Значение Vdc постоянного напряжения (В) получается из датчика напряжения (не проиллюстрирован), предоставленного в линии электропитания постоянного тока между аккумулятором 1 и инвертором 3. Значение Vdc постоянного напряжения (В) может определяться посредством сигнала, передаваемого из контроллера аккумулятора (не проиллюстрирован).
[0023] Контроллер 2 непосредственно получает сигнал переключателя зажигания из переключателя зажигания 10. Сигнал переключателя зажигания может получаться через связь из другого контроллера, такого как контроллер транспортного средства (не проиллюстрирован).
[0024] На этапе S202, контроллер 2 задает значение Tm1* первого целевого крутящего момента. В частности, значение Tm1* первого целевого крутящего момента задается на основе позиции AP акселератора и частоты ωm вращения электромотора, вводимых на этапе S201, посредством обращения к таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3. Как описано выше, устройство управления для электрического транспортного средства согласно варианту осуществления является применимым к транспортному средству, допускающему управление ускорением/замедлением и остановкой только посредством операции нажатия педали акселератора, и обеспечивает замедление или остановку, когда позиция акселератора является небольшой. Следовательно, в таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3, крутящий момент электромотора задается таким образом, что величина рекуперации электромотора с позицией акселератора в 0 (полное закрытие) является большой, и величина рекуперации электромотора увеличивается по мере того, как уменьшается позиция акселератора. Соответственно, в таблице позиций акселератора и крутящих моментов, когда частота ωm вращения электромотора является положительной, и позиция акселератора равна 0 (полное закрытие), отрицательный крутящий момент электромотора задается таким образом, чтобы управлять рекуперативной тормозной силой. Следует отметить, что таблица позиций акселератора и крутящих моментов не ограничена таблицей, проиллюстрированной на фиг. 3.
[0025] На этапе S203, контроллер 2 выполняет процесс первоначального трогания с места. В частности, определяется то, находится или нет момент времени в момент первоначального трогания с места транспортного средства, и когда момент времени находится в момент первоначального трогания с места, различные управляющие параметры для управления крутящим моментом электромотора изменяются на управляющие параметры для первоначального трогания с места. Управляющие параметры здесь означают различные заданные значения, при которых транспортное средство плавно останавливается посредством только крутящего момента электромотора независимо от уклона, и состояние остановки транспортного средства в системе управления крутящего момента электромотора поддерживается.
[0026] Здесь, "для первоначального трогания с места" означает момент, когда контроллер 2 определяет операцию трогания с места, которая должна выполняться. В этом варианте осуществления, когда сигнал переключателя зажигания, получаемый на этапе S201, переходит из выключенного состояния во включенное состояние, операция трогания с места определяется как выполняемая.
[0027] При определении трогания с места, операция трогания с места может определяться как выполняемая, когда парковочный тормоз распускается, или когда позиция переключения коробки передач переходит из позиции для парковки, в дополнение к случаю, в котором сигнал переключателя зажигания, получаемый на этапе S201, переходит из выключенного состояния во включенное состояние. При определении трогания с места, операция трогания с места может определяться как выполняемая, когда определяется, по меньшей мере, любой из случая, в котором парковочный тормоз распускается, и случая, в котором позиция переключения коробки передач переходит из позиции для парковки, без определения того, переходит или нет сигнал переключателя зажигания из выключенного состояния во включенное состояние.
[0028] Управляющие параметры для первоначального трогания с места, которые должны задаваться, задаются таким образом, что скорость отклика крутящего момента электромотора на возмущения является высокой по сравнению с управляющими параметрами в процессе управления остановкой, выполняемом непосредственно перед остановкой транспортного средства с тем, чтобы уменьшать расстояние сползания, которое называется "откатом", который возможно возникает при первоначальном трогании с места на дороге с уклоном транспортного средства, до минимума. Заданные управляющие параметры для первоначального трогания с места возвращаются к управляющим параметрам в ходе нормального движения после того, как удовлетворяются предварительно определенные условия.
[0029] На этапе S204, контроллер 2 выполняет процесс управления остановкой. В частности, контроллер 2 определяет то, находится или нет момент времени в момент времени непосредственно перед остановкой транспортного средства. Когда момент времени находится в момент времени непосредственно перед остановкой транспортного средства, контроллер 2 задает значение Tm1* первого целевого крутящего момента, вычисленное на этапе S202, равным значению Tm3* команды управления третьим крутящим моментом электромотора, и в момент времени непосредственно перед остановкой транспортного средства, контроллер 2 задает значение Tm2* второго целевого крутящего момента равным значению Tm3* команды управления третьим крутящим моментом электромотора. Значение Tm2* второго целевого крутящего момента сходится к значению Td команды управления возмущающим крутящим моментом с уменьшением частоты вращения электромотора, и значение Tm2* второго целевого крутящего момента составляет положительный крутящий момент на дороге, идущей в подъем, отрицательный крутящий момент на дороге, идущей под спуск, и почти в нуль на ровной дороге. Таким образом, состояние остановки транспортного средства может поддерживаться независимо от уклона поверхности дороги. Ниже описываются подробности процесса управления остановкой.
[0030] На этапе S205, контроллер 2 выполняет процесс управления демпфированием вибрации. В частности, контроллер 2 выполняет процесс управления демпфированием вибрации для значения Tm3* команды управления крутящим моментом электромотора, вычисленного на этапе S204, и частоты ωm вращения электромотора. Таким образом, вычисленное значение Tm* команды управления крутящим моментом электромотора уменьшает вибрацию системы передачи крутящего момента (к примеру, крутильную вибрацию ведущего вала) без ухудшения отклика крутящего момента ведущего вала. Ниже описываются подробности процесса управления демпфированием вибрации.
[0031] Затем, на этапе S206, контроллер 2 выполняет процесс вычисления значения команды управления током. В частности, целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются на основе частоты ωm вращения электромотора и значения Vdc постоянного напряжения в дополнение к значению целевого крутящего момента электромотора Tm*, вычисленному на этапе S205. Например, таблица, задающая взаимосвязь целевого значения тока d-оси и целевого значения тока q-оси со значением команды управления крутящим моментом, частотой вращения электромотора и значением постоянного напряжения, подготавливается заранее, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси получаются посредством обращения к этой таблице.
[0032] На этапе S207, управление по току выполняется таким образом, чтобы сопоставлять ток id d-оси и ток iq d-оси с целевым значением id* тока d-оси и целевым значением iq* тока q-оси, полученными на этапе S206, соответственно. С этой целью, ток id d-оси и ток iq d-оси сначала получаются на основе значений iu, iv и iw трехфазного переменного тока и фазы α вращения электромотора 4, вводимых на этапе S201. Затем, значения vd и vq команд управления напряжением d-оси и q-оси вычисляются из отклонений между значениями id* и iq* команд управления током d-оси и q-оси и токами id и iq d-оси и q-оси.
[0033] Затем, из значений vd и vq команд управления напряжением d-оси и q-оси и фазы α вращения электромотора 4, получаются значения vu, vv и vw команд управления трехфазным переменным напряжением. После этого, из полученных значений vu, vv и vw команд управления трехфазным переменным напряжением и значения Vdc токового напряжения, получаются PWM-сигналы tu (%), tv (%) и tw (%). Посредством размыкания и замыкания переключающих элементов инвертора 3 посредством PWM-сигналов tu, tv и tw, полученных таким способом, электромотор 4 может приводиться в действие с требуемым крутящим моментом, инструктированным посредством значения Tm* команды управления крутящим моментом.
[0034] Здесь, до того, как подробно описывается процесс первоначального трогания с места в качестве аспекта настоящего изобретения, описывается характеристика Gp(s) передачи из значения Tm целевого крутящего момента к частоте ωm вращения электромотора, и после этого подробно описывается вышеописанный процесс управления остановкой и управление демпфированием вибрации в устройстве управления для электрического транспортного средства согласно варианту осуществления.
[0035] Характеристики Gp(s) передачи
Фиг. 4 является схемой, моделирующей систему трансмиссии для передачи движущей силы транспортного средства, и каждый параметр на схеме является таким, как описано ниже.
Jm - инерция электромотора
Jw - инерция ведущих колес
M - вес транспортного средства
KD - крутильная жесткость приводной системы
N - полное передаточное отношение
r - наружный радиус шин
ωm - частота вращения электромотора
Tm - значение целевого крутящего момента
TD - крутящий момент ведущих колес
F - сила, прикладываемая к транспортному средству
V - скорость транспортного средства
ωw - частота вращения ведущих колес
Следующие уравнения движения могут извлекаться из фиг. 4. Следует отметить, что звездочка (*), присоединяемая в правом верхнем углу ссылочного обозначения в следующих уравнениях (1)-(3), указывает дифференциал времен.
[0036] уравнение 1

[0037] уравнение 2

[0038] уравнение 3

[0039] уравнение 4

[0040] уравнение 5

[0041] Следует отметить, что Kt в уравнении (5) указывает коэффициент трения между шиной и поверхностью дороги.
[0042] Характеристика Gp(s) передачи из значения Tm целевого крутящего момента электромотора 4 в частоту ωm вращения электромотора, полученная на основе уравнений движения (1)-(5), выражается посредством следующего уравнения (6).
[0043] уравнение 6

[0044] Здесь, каждый параметр в уравнении (6) выражается посредством следующих уравнений (7).
[0045] уравнение 7
[0046] Посредством исследований, полюса и нулевые точки передаточной функции, показанной в уравнении (6), могут быть аппроксимированы в передаточную функцию следующего уравнения (8), и один полюс и одна нулевая точка указывают значения, чрезвычайно близкие друг к другу. Это является эквивалентным тому, что α и β следующего уравнения (8) указывают значения, чрезвычайно близкие друг к другу.
[0047] уравнение 8

[0048] Соответственно, посредством выполнения отмены нулей и полюсов (аппроксимации для α=β) в уравнении (8), Gp(s) составляет характеристику передачи (второй порядок)/(третий порядок), как показано в следующем уравнении (9).
[0049] уравнение 9

[0050] Как описано выше, характеристика Gp(s) передачи из значения Tm целевого крутящего момента к частоте ωm вращения электромотора в системе передачи крутящего момента транспортного средства получается.
[0051] Процесс управления остановкой
Далее описываются подробности процесса управления остановкой, выполняемого на этапе S204 на фиг. 2, со ссылкой на фиг. 5-7. Фиг. 5 является блок-схемой для осуществления процесса управления остановкой.
[0052] Устройство 501 задания крутящего F/B-момента по частоте вращения электромотора вычисляет крутящий момент Tω обратной связи по частоте вращения электромотора (в дальнейшем называемый "крутящим F/B-моментом Tω по частоте вращения электромотора"), чтобы останавливать электрическое транспортное средство посредством рекуперативной тормозной силы из электромотора 4 на основе определенной частоты ωm вращения электромотора.
[0053] Фиг. 6 является схемой, описывающей способ для вычисления крутящего F/B-момента Tω по частоте вращения электромотора на основе частоты ωm вращения электромотора. Устройство 501 задания крутящих F/B-моментов по частоте вращения электромотора включает в себя умножитель 601 и вычисляет крутящий F/B-момент Tω по частоте вращения электромотора посредством умножения частоты ωm вращения электромотора на усиление Kvref. Тем не менее, усиление Kvref является отрицательным значением (со знаком "минус"), необходимым для того, чтобы останавливать электрическое транспортное средство непосредственно перед тем, как электрическое транспортное средство останавливается, и надлежащим образом задается, например, из экспериментальных данных или аналогичных данных.
[0054] Следует отметить, что хотя устройство 501 задания крутящего F/B-момента по частоте вращения электромотора описывается таким образом, что оно вычисляет крутящий F/B-момент Tω по частоте вращения электромотора посредством умножения частоты ωm вращения электромотора на усиление Kvref, крутящий F/B-момент Tω по частоте вращения электромотора может вычисляться с использованием таблицы рекуперативных крутящих моментов, задающей рекуперативный крутящий момент относительно частоты ωm вращения электромотора, и таблицы темпов спада, сохраняющей темп спада частоты ωm вращения электромотора заранее.
[0055] Модуль 502 оценки возмущающего крутящего момента, проиллюстрированный на фиг. 5, вычисляет оцененное значение Td возмущающего крутящего момента на основе определенной частоты ωm вращения электромотора и значения Tm3* третьего целевого крутящего момента.
[0056] Фиг. 7 является схемой, описывающей способ для вычисления оцененного значения Td возмущающего крутящего момента на основе частоты ωm вращения электромотора и значения Tm3* третьего целевого крутящего момента.
[0057] Блок 701 управления выступает в качестве фильтра, имеющего характеристику H(s)/Gp(s) передачи, и выполняет процесс фильтрации для частоты ωm вращения электромотора, за счет этого вычисляя оцененное значение первого крутящего момента электромотора. Gp(s) представляет собой модель для характеристики передачи крутящего момента, вводимого в транспортное средство, и частоты вращения электромотора, и выражается посредством вышеприведенного уравнения (9). H(s) представляет собой фильтр нижних частот, имеющий такую характеристику передачи, что разность между его степенью знаменателя и степенью числителя не меньше разности между степенью знаменателя и степенью числителя модели Gp(s).
[0058] Блок 702 управления выступает в качестве фильтра нижних частот, имеющего характеристику H(s) передачи, заданную равным предварительно определенной постоянной времени, и выполняет процесс фильтрации для значения Tm3* третьего целевого крутящего момента, за счет этого вычисляя оцененное значение второго крутящего момента электромотора.
[0059] Модуль 703 вычитания вычитает оцененное значение первого крутящего момента электромотора, вычисленное посредством блока 701 управления, из оцененного значения второго крутящего момента электромотора, вычисленного в блоке 702 управления.
[0060] Блок 704 управления представляет собой фильтр, имеющий характеристику Hz(s) передачи, и выполняет процесс фильтрации для вывода модуля 703 вычитания, за счет этого вычисляя оцененное значение Td возмущающего крутящего момента.
[0061] Здесь, приводится описание характеристики Hz(s) передачи. Вышеприведенное уравнение (9) перезаписывается, чтобы получать следующее уравнение (10). Следует отметить, что ζz, ωz, ζp и ωp в уравнении (10) выражаются посредством уравнения (11).
[0062] уравнение 10

[0063] уравнение 11
[0064] Как описано выше, Hz(s) выражается посредством следующего уравнения (12).
[0065] уравнение 12

[0066] Оцененное значение Td возмущающего крутящего момента, вычисляемое так, как описано выше, оценивается посредством модуля наблюдения возмущений, как проиллюстрировано на фиг. 7, и представляет собой параметр, указывающий возмущения, которые действуют на транспортное средство.
[0067] Здесь, хотя сопротивление воздуха, погрешность моделирования, вызываемая посредством варьирования веса транспортного средства вследствие числа пассажиров и допустимой нагрузки, сопротивление качения шин, сопротивление вследствие уклона поверхности дороги и аналогичное сопротивление считаются возмущениями, действующими на транспортное средство, фактор возмущений, доминирующий непосредственно перед остановкой транспортного средства и при первоначальном трогании с места, представляет собой сопротивление вследствие уклона. Хотя факторы возмущений отличаются в зависимости от условий вождения, факторы возмущений, описанные выше, могут совместно оцениваться, поскольку модуль 502 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом электромотора, частоты ωm вращения электромотора и модели Gp(s) транспортного средства. Это позволяет добиваться плавной остановки транспортного средства из замедления при любом состоянии движения.
[0068] Снова ссылаясь на фиг. 5, пояснение продолжается. Сумматор 503 вычисляет значение Tm2* второго целевого крутящего момента посредством суммирования крутящего F/B-момента Tω по частоте вращения электромотора, вычисленного посредством устройства 501 задания крутящих F/B-моментов по частоте вращения электромотора, и оцененного значения Td возмущающего крутящего момента, вычисленного посредством модуля 502 оценки возмущающих крутящих моментов.
[0069] Модуль 504 сравнения крутящих моментов сравнивает абсолютные величины значения Tm1* первого целевого крутящего момента со значением Tm2* второго целевого крутящего момента и задает большее значение целевого крутящего момента в качестве значения Tm3* третьего целевого крутящего момента. Хотя значение Tm2* второго целевого крутящего момента меньше значения Tm1* первого целевого крутящего момента в ходе движения транспортного средства, когда транспортное средство замедляется, и возмущения увеличиваются непосредственно перед остановкой транспортного средства (скорость транспортного средства равна или меньше предварительно определенной скорости транспортного средства), значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента. Таким образом, когда значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, модуль 504 сравнения крутящих моментов определяет то, что момент времени находится в момент времени непосредственно перед остановкой транспортного средства, и задает значение Tm3* третьего целевого крутящего момента равным значению Tm1* первого целевого крутящего момента. Дополнительно, когда значение Tm2* второго целевого крутящего момента превышает значение Tm1* первого целевого крутящего момента, модуль 504 сравнения крутящих моментов определяет то, что транспортное средство находится в момент времени непосредственно перед остановкой транспортного средства, и задает значение Tm* третьего целевого крутящего момента равным значению Tm2* второго целевого крутящего момента. Следует отметить, что значение Tm2* второго целевого крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, и отрицательный крутящий момент на дороге, идущей под спуск, и сходится почти к нулю на ровной дороге, чтобы поддерживать состояние остановки транспортного средства.
[0070] Процесс управления демпфированием вибрации
Далее приводится описание процесса управления демпфированием вибрации этапа S205 на фиг. 2. На этом этапе, процесс управления демпфированием вибрации выполняется для значения Tm3* третьего целевого крутящего момента, вычисленного на этапе S204, чтобы получать значение Tm* команды управления крутящим моментом электромотора. Далее приводится конкретное описание со ссылкой на фиг. 8 и фиг. 9.
[0071] Фиг. 8 является блок-схемой процесса управления демпфированием вибрации, используемого в этом варианте осуществления. Здесь, значение Tm3* команды управления крутящим моментом электромотора, вычисленное на этапе S204, и частота ωm вращения электромотора вводятся в блок 801 управления демпфированием вибрации, чтобы вычислять значение Tm* команды управления крутящим моментом электромотора, которое уменьшает вибрацию системы передачи крутящего момента (к примеру, крутильную вибрацию ведущего вала) без ухудшения отклика крутящего момента ведущего вала. Далее описывается пример процесса управления демпфированием вибрации, выполняемого посредством блока 801 управления демпфированием вибрации, со ссылкой на фиг. 9.
[0072] Фиг. 9 является блок-схемой, подробно описывающей процесс управления демпфированием вибрации, используемого в этом варианте осуществления. Модуль 901 компенсации с прямой связью (в дальнейшем называемый "модулем F/F-компенсации") выступает в качестве фильтра, имеющего передаточную характеристику Gr(s)/Gp(s), которая состоит из передаточной характеристики Gr(s) и обратной системы модели Gp(s) для передаточной характеристики крутящего момента, вводимого в транспортное средство, и частоты вращения электромотора. Посредством выполнения процесса фильтрации для значения Tm3* третьего целевого крутящего момента, выполняется процесс управления демпфированием вибрации посредством компенсации с прямой связью. Используемая передаточная характеристика Gr(s) может выражаться посредством следующего уравнения (13).
[0073] уравнение 13

[0074] Следует отметить, что F/F-компенсация по управлению демпфированием вибрации, выполняемая посредством модуля 901 F/F-компенсации, может представлять собой управление демпфированием вибрации, описанное в JP2001-45613A, или может представлять собой управление демпфированием вибрации, описанное в JP2002-152916A.
[0075] Блоки 903 и 904 управления представляют собой фильтры, используемые для управления с обратной связью (в дальнейшем, обратная связь называется "F/B"). Блок 903 управления представляет собой фильтр, имеющий вышеописанную передаточную характеристику Gp(s). Блок 903 управления выполняет процесс фильтрации для значений, полученных посредством суммирования вывода из модуля 901 F/F-компенсации, который выводится из сумматора 905, с выводом из блока 904 управления, описанного ниже. Модуль 906 вычитания вычитает частоту ωm вращения электромотора из значения, выводимого из блока 903 управления. Вычитаемое значение вводится в блок 904 управления. Блок 904 управления представляет собой фильтр, имеющий передаточную характеристику H(s)/Gp(s), которая состоит из фильтра H(s) нижних частот и обратной системы модели Gp(s) для передаточной характеристики крутящего момента, вводимого в транспортное средство, и частоты вращения электромотора. Блок 904 управления выполняет процесс фильтрации для вывода из модуля 906 вычитания. Значение, вычисляемое как крутящий момент F/B-компенсации после процесса фильтрации, выводится в модуль 907 компенсации усиления.
[0076] Модуль 907 компенсации усиления представляет собой фильтр, имеющий усиление KFB, и выполнен с возможностью регулировать значение усиления KFB, чтобы регулировать стабильность модуля F/B-компенсации, используемого в процессе управления демпфированием вибрации. Крутящий момент TF/B F/B-компенсации, для которого регулировка усиления выполняется посредством модуля 907 компенсации усиления, выводится в сумматор 905.
[0077] Затем сумматор 905 суммирует значение Tm3* третьего целевого крутящего момента, для которого процесс управления демпфированием вибрации выполнен посредством модуля 901 F/F-компенсации, с вышеописанным значением TF/B, вычисляемым как крутящий момент F/B-компенсации с тем, чтобы вычислять значение Tm* команды управления крутящим моментом электромотора, чтобы уменьшать вибрации в системе передачи крутящего момента для транспортного средства.
[0078] Следует отметить, что управление демпфированием вибрации, выполняемое посредством блока 801 управления демпфированием вибрации, может представлять собой управление демпфированием вибрации, описанное в JP2003-9566A, или может представлять собой управление демпфированием вибрации, описанное в JP2010-288332A.
[0079] Выше описаны подробности управления крутящим моментом электромотора в ходе нормального движения, в том числе непосредственно перед остановкой транспортного средства. Далее подробно описывается процесс первоначального трогания с места с учетом этой предпосылки.
[0080] Здесь, приводится описание цели процесса первоначального трогания с места. Как описано выше, процесс первоначального трогания с места, описанный ниже, представляет собой процесс для задания управляющего параметра, при котором скорость отклика крутящего момента электромотора на возмущения, в частности, возмущения вследствие уклона, увеличивается для того, чтобы уменьшать откат транспортного средства при первоначальном трогании с места.
[0081] Оцененное значение возмущающего крутящего момента при первоначальном трогании с места не совпадает с возмущениями вследствие фактического уклона за счет инициализации на предварительно определенном значении (например, эквивалентном ровной дороге) в ходе прекращения работы системы транспортного средства. Следовательно, при первоначальном трогании с места на дороге с уклоном, оцененное значение Td возмущающего крутящего момента повышается сразу после первоначального трогания с места транспортного средства, и откат транспортного средства возникает в зависимости от уклона до сходимости к возмущению вследствие фактического уклона. Цель процесса первоначального трогания с места, описанного ниже, заключается в том, чтобы увеличивать быструю скорость отклика оцененного значения Td возмущающего крутящего момента на возмущения вследствие уклона, чтобы увеличивать скорость отклика крутящего момента электромотора на возмущения вследствие уклона, за счет этого уменьшая расстояние отката, который возможно возникает сразу после первоначального трогания с места транспортного средства.
[0082] Процесс первоначального трогания с места
Фиг. 10 является блок-схемой последовательности операций способа процесса первоначального трогания с места, выполняемого на этапе S203 на фиг. 2. Процесс первоначального трогания с места всегда выполняется посредством контроллера 2 с постоянным циклом в то время, когда электроэнергия подается в контроллер 2.
[0083] На этапе S701, контроллер 2 определяет то, переходит или нет сигнал переключателя зажигания из выключенного состояния во включенное. Когда водитель управляет переключателем зажигания (пусковым переключателем) транспортного средства таким образом, чтобы осуществлять переход сигнала переключателя зажигания из выключенного состояния во включенное, контроллер 2 выполняет последующий процесс этапа S701B. Когда сигнал переключателя зажигания остается во включенном состоянии, т.е. когда состояние транспортного средства не находится сразу после первоначального трогания с места, контроллер 2 выполняет процесс этапа S703.
[0084] На этапе S701, когда сигнал переключателя зажигания переходит из выключенного состояния во включенное, контроллер 2 может выполнять процесс следующего этапа S701B, когда случай дополнительно определяется как, по меньшей мере, любой из случая, в котором парковочный тормоз определяется как распущенный, и случая, в котором позиция переключения коробки передач переходит из позиции для парковки, и контроллер 2 может выполнять процесс этапа S703 в других случаях.
[0085] Контроллер 2 может выполнять процесс следующего этапа S701B, когда случай определяется как, по меньшей мере, любой из случая, в котором парковочный тормоз определяется как распущенный, и случая, в котором позиция переключения коробки передач определяется как переходящая из позиции для парковки, без определения того, переходит или нет сигнал переключателя зажигания из выключенного состояния во включенное, и контроллер 2 может выполнять процесс этапа S703 в других случаях.
[0086] На этапе S701B, контроллер 2 определяет то, прекращает или нет действовать механическая тормозная сила от ножного тормоза. Когда механическая тормозная сила от ножного тормоза прекращает действовать, выполняется процесс этапа S702. В то время, когда механическая тормозная сила действует на транспортное средство, циклично выполняется процесс этапа S701B. Контроллер 2 может опускать процесс этого этапа. Таким образом, в процессе этапа S701, контроллер 2 далее может выполнять процесс этапа S702, когда определяется "Да".
[0087] На этапе S702, таймер 1, флаг 1 (в дальнейшем называемый "flg1") и флаг 2 (в дальнейшем называемый "flg2") задаются равными таймеру 1=T1, flg1=1 и flg2=0, соответственно.
[0088] Здесь, приводится описание flg1, flg2 и таймера 1.
[0089] Flg1 представляет собой флаг для определения переключения между управляющим параметром в ходе нормального движения, в том числе непосредственно перед остановкой транспортного средства, и управляющим параметром при первоначальном трогании с места. Flg1=1 означает момент времени сразу после перехода сигнала переключателя зажигания из выключенного состояния во включенное, т.е. состояние транспортного средства сразу после первоначального трогания с места. Когда процесс этапа S701B не опускается, flg1=1 означает состояние, в котором момент времени находится сразу после перехода сигнала переключателя зажигания из выключенного состояния во включенное, и механическая тормозная сила посредством тормоза прекращает действовать.
[0090] Flg2 представляет собой флаг для определения того, находится или нет транспортное средство в состоянии отката. Flg2=0 в качестве начального значения означает, что транспортное средство не откатывается.
[0091] Таймер 1 представляет собой таймер для измерения времени, чтобы возвращать заданный управляющий параметр при первоначальном трогании с места к управляющему параметру в ходе нормального движения. Значение T1 счетчика, заданное сразу после первоначального трогания с места, представляет собой период времени до момента, когда возмущения вследствие уклона поверхности дороги, на которой останавливается транспортное средство, не совпадают с оцененным значением возмущающего крутящего момента, вычисленным посредством контроллера 2, и крутящий момент электромотора управляется со значением Tm* команды управления крутящим моментом электромотора, чтобы поддерживать состояние остановки транспортного средства после определения первоначального трогания с места. Значение T1 счетчика является значением, предварительно адаптированным посредством эксперимента и т.п.
[0092] Значение T1 счетчика является, например, эквивалентным пяти секундам. Тем не менее, значение T1 счетчика может изменяться согласно весу транспортного средства и уклону поверхности дороги. Например, по мере того, как вес транспортного средства или уклон поверхности дороги становится большим, значение T1 счетчика задается большим значением.
[0093] Снова ссылаясь на блок-схему последовательности операций способа, пояснение продолжается. После того, как процесс этапа S702 выполняется, выполняется процесс этапа S711. На этапе S711, состояние flg1 определяется. В случае flg1=1, выполняется процесс этапа S712. В случае flg1=0, выполняется процесс этапа S713. Когда сигнал переключателя зажигания переходит из выключенного во включенное состояние, flg1=1 задается на этапе S702, в силу чего контроллер 2 выполняет процесс этапа S712.
[0094] На этапе S712, управляющий параметр при первоначальном трогании с места задается в качестве управляющего параметра, используемого при вычислении оцененного значения Td возмущающего крутящего момента. После того, как управляющий параметр при первоначальном трогании с места задается, процесс первоначального трогания с места завершается.
[0095] С другой стороны, на этапе S713, выполняемом в случае flg1=0, управляющий параметр в ходе нормального движения задается в качестве управляющего параметра, используемого при вычислении оцененного значения Td возмущающего крутящего момента. После того, как управляющий параметр в ходе нормального движения задается, процесс первоначального трогания с места завершается.
[0096] Далее приводится описание последовательности операций в случае, если это не момент времени, в который сигнал переключателя зажигания переходит из выключенного во включенное состояние.
[0097] На этапе S703, контроллер 2 определяет состояние flg1. В случае flg1=1, выполняется процесс этапа S704. В случае, если не удовлетворяется flg1=1, выполняется процесс этапа S711.
[0098] На этапе S704, предыдущее значение Tm1_z значения Tm1* первого целевого крутящего момента, которое получается посредством обращения к таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3, сравнивается с предыдущим значением Tm2_z значения Tm2* второго целевого крутящего момента, которое сходится к оцененному значению Td возмущающего крутящего момента с уменьшением частоты вращения электромотора, на основе позиции AP акселератора, вводимой на этапе S201 на фиг. 2, и частоты ωm вращения электромотора. Когда Tm2_z > Tm1_z удовлетворяется, процесс этапа S705 выполняется для определения того, находится или нет транспортное средство в ходе отката. Когда Tm2_z > Tm1_z не удовлетворяется, определяется то, что транспортное средство находится в состоянии нормального движения, например, в состоянии, в котором водитель нажимает педаль акселератора, чтобы ускорять транспортное средство, и выполняется процесс этапа S710.
[0099] На этапе S704, может быть определено то, является или нет позиция акселератора нулевой, вместо сравнения предыдущего значения Tm1_z значения Tm1* первого целевого крутящего момента с предыдущим значением Tm2_z значения Tm2* второго целевого крутящего момента. Когда "позиция акселератора=0" удовлетворяется, выполняется процесс этапа S705. Когда "позиция акселератора=0" не удовлетворяется, определяется то, что транспортное средство начинает движение, согласно намерению водителя, flg задается равным 0 на этапе S710, и после этого выполняется процесс этапа S711. Следует отметить, что на этом этапе должно определяться то, имеется или нет вероятность отката транспортного средства. После этого, "позиция акселератора=0" может определяться как удовлетворяемая с приблизительно нулевым значением. Верхнее предельное значение для определения как нулевого значения может изменяться согласно весу транспортного средства и абсолютной величине уклона. Например, верхнее предельное значение может увеличиваться по мере того, как увеличивается вес транспортного средства или уклон.
[0100] На этапе S705, состояние flg2 определяется. В случае flg2=1, транспортное средство определяется как находящееся в ходе отката, и выполняется процесс этапа S708. В случае flg2=0, транспортное средство определяется как не находящееся в состоянии отката, и выполняется процесс этапа S706.
[0101] Этап S706 представляет собой процесс, выполняемый после определения того, что откат не возникает, на этапе S705, и представляет собой этап для определения того, начинается или нет откат. В частности, определяется то, удовлетворяется или нет "абсолютное значение |ωm| частоты вращения электромотора > частота ωm1 вращения электромотора". Частота ωm1 вращения электромотора предварительно определена посредством эксперимента и т.п. и представляет собой частоту вращения электромотора, допускающую определение того, что транспортное средство начинает откат. Когда "|ωm| > ωm1" удовлетворяется, выполняется процесс этапа S707, а в случае неудовлетворения, выполняется процесс этапа S711.
[0102] На этапе S707, контроллер 2 задает flg2=1, поскольку определяется то, что откат начинается, на этапе S706. После задания, выполняется процесс этапа S711.
[0103] На этапе S708, состояние отката определяется. В случае "таймер 1=0", или когда "абсолютное значение |ωm| частоты вращения электромотора < частота ωm2 вращения электромотора" удовлетворяется, откат транспортного средства определяется как уменьшающийся, и выполняется процесс этапа S710. Частота ωm2 вращения электромотора предварительно определена посредством эксперимента и т.п. и представляет собой частоту вращения электромотора, допускающую определение того, что транспортное средство остановлено. Когда как "таймер 1=0", так и "|ωm| < ωm2" не удовлетворяются, транспортное средство определяется как находящееся в ходе отката, и выполняется процесс на этапе S709 для выполнения процесса обратного отсчета таймера 1.
[0104] На этапе S710, контроллер 2 задает flg1 равным 0, чтобы возвращаться из управляющего параметра при первоначальном трогании с места к управляющему параметру в ходе нормального движения.
[0105] На этапе S709, значение счетчика таймера 1 вычитается посредством единицы. Таким образом, в ходе отката, значение счетчика таймера 1 отсчитывается в обратном порядке для каждого периода работы до тех пор, пока откат не определяется как уменьшающийся, на этапе S708. После обратного отсчета, выполняется процесс этапа S711.
[0106] На этапе S711, состояние flg1 определяется для того, чтобы определять управляющий параметр, который должен задаваться. В случае flg1=1, процесс этапа S712 для задания управляющего параметра при первоначальном трогании с места выполняется. В случае flg1=0, управляющий параметр для управления крутящим моментом электромотора задается равным управляющему параметру в ходе нормального движения, и процесс первоначального трогания с места завершается.
[0107] Далее приводится описание задания управляющего параметра при первоначальном трогании с места, выполняемом на этапе S712. Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процессов, связанных с заданием управляющего параметра при первоначальном трогании с места.
[0108] На этапе S712a, контроллер 2 задает усиление Kvref устройства 601 задания крутящего F/B-момента по частоте вращения электромотора, проиллюстрированного на фиг. 6, равным большому значению по сравнению с периодом в ходе нормального движения, в том числе непосредственно перед остановкой транспортного средства в системе управления с обратной связью по скорости/частоте вращения, которая выполняет обратную связь частоты вращения электромотора. Это увеличивает крутящий F/B-момент Tω по частоте вращения электромотора при первоначальном трогании с места, за счет этого обеспечивая более быстрое схождение значения Tm* команды управления крутящим моментом электромотора к возмущениям. Следовательно, после первоначального трогания с места, скорость отклика крутящего момента электромотора на возмущения, действующие на транспортное средство, увеличивается, так что обеспечивается уменьшение расстояния отката.
[0109] Усиление Kvref может увеличиваться по мере того, как оцененное значение Td возмущающего крутящего момента становится большим. Это обеспечивает преимущество уменьшения расстояния отката транспортного средства с поддержанием равным или большим определенного уровня, даже если увеличиваются возмущения, действующие на транспортное средство. Наиболее доминирующий фактор возмущений, который оказывает влияние на расстояние отката, представляет собой уклон поверхности дороги. Соответственно, уклон поверхности дороги, на которой останавливается транспортное средство, может определяться посредством средства 12 определения уклона (см. фиг. 1), такого как датчик уклона с тем, чтобы увеличивать усиление Kvref по мере того, как увеличивается уклон поверхности дороги.
[0110] На этапе S712b, коэффициент ζc сглаживания знаменателя фильтра Hz(s), проиллюстрированного на фиг. 7, который включен в модуль 502 оценки возмущающего крутящего момента, проиллюстрированный на фиг. 5, задается небольшим по сравнению с периодом в ходе нормального движения. Это обеспечивает быстрое сопоставление оцененного значения Td возмущающего крутящего момента с возмущениями вследствие уклона в то время, когда формируется вибрация при ускорении приблизительно в 1 Гц. Следовательно, скорость отклика крутящего момента электромотора на возмущения увеличивается, в силу чего расстояние отката может уменьшаться.
[0111] Коэффициент ζc сглаживания знаменателя фильтра Hz(s) может снижаться по мере того, как увеличивается оцененное значение Td возмущающего крутящего момента. Это обеспечивает преимущество уменьшения расстояния отката транспортного средства с поддержанием равным или большим определенного уровня, даже если увеличиваются возмущения, действующие на транспортное средство. Уклон поверхности дороги, на которой останавливается транспортное средство, может определяться таким образом, чтобы уменьшать коэффициент ζc сглаживания знаменателя фильтра Hz(s) по мере того, как увеличивается уклон поверхности дороги.
[0112] На этапе S712c, постоянная времени фильтра H(s) нижних частот, указываемая посредством блока 702 управления, который включен в модуль 502 оценки возмущающего крутящего момента, задается равной небольшому значению по сравнению с периодом в ходе нормального движения. Это обеспечивает быстрое сопоставление оцененного значения Td возмущающего крутящего момента с возмущениями вследствие уклона поверхности дороги, на которой остановилось транспортное средство. Следовательно, скорость отклика крутящего момента электромотора на возмущения увеличивается, в силу чего расстояние отката может уменьшаться.
[0113] Постоянная времени фильтра H(s) нижних частот может снижаться по мере того, как увеличивается оцененное значение Td возмущающего крутящего момента. Это обеспечивает преимущество уменьшения расстояния отката транспортного средства с поддержанием равным или большим определенного уровня, даже если увеличиваются возмущения, действующие на транспортное средство. Уклон поверхности дороги, на которой останавливается транспортное средство, может определяться таким образом, чтобы уменьшать постоянную времени фильтра H(s) нижних частот по мере того, как увеличивается уклон поверхности дороги.
[0114] На этапе S712d, число дискретизаций частоты вращения электромотора, которое связано с процессом определения скользящего среднего частоты ωm вращения электромотора, используемой в процессе управления остановкой этапа S204 и в процессе управления демпфированием вибрации этапа S205 на фиг. 2, снижается по сравнению с периодом в ходе движения. Это обеспечивает уменьшение мертвого времени при определении частоты вращения электромотора. Поскольку варьирование электромотора обычно варьируется незначительно сразу после первоначального трогания с места, шум, вызываемый посредством определения угла поворота и частоты вращения электромотора, является низким, и рокочущий шум и т.п. не возникает, даже если снижается число процессов определения скользящего среднего. Соответственно, стабильность управления обеспечивается, даже если мертвое время при определении частоты вращения электромотора уменьшается, чтобы увеличивать скорость отклика.
[0115] На этапе S712e, усиление KFB обратной связи (см. модуль 907 компенсации усиления на фиг. 9), используемое в процессе управления демпфированием вибрации, выполняемом на этапе S205, задается равным небольшому значению по сравнению с периодом в ходе движения. Это обеспечивает уменьшение перерегулирования крутящего момента TF/B F/B-компенсации (крутящего момента демпфирования вибрации) до значения целевого крутящего момента, за счет этого обеспечивая стабильность управления крутящим моментом электромотора.
[0116] Как описано выше, после определения первоначального трогания с места, управляющий параметр для управления крутящим моментом электромотора задается равным управляющему параметру при первоначальном трогании с места посредством процессов этапов S712a-S712e. Порядок этапов S712a-S712e не ограничен этим. Не обязательно требуется выполнять все этапы S712a-S712e, и выполняется, по меньшей мере, только один из этапов S712a-S712d.
[0117] Выше описаны подробности процесса первоначального трогания с места. Здесь, приводится описание причины увеличения скорости отклика крутящего момента электромотора только при первоначальном трогании с места.
[0118] В ходе нормального движения транспортного средства, вследствие влияния шума, вызываемого посредством определения угла поворота и частоты r вращения, иногда выводится высокочастотный компонент крутящего момента (например, вибрационный компонент в полосе частот 25-150 Гц). Вибрационный компонент передается в ходовую часть кузова из блока с электромотором, ведущего вала или аналогичного модуля через держатели и т.п., так что вызывается рокочущий шум. С учетом этого, когда высокая скорость отклика управляющего параметра для управления крутящим моментом электромотора увеличивается в ходе нормального движения, одновременно увеличивается высокочастотное усиление, так что возникает значительный рокочущий шум. Таким образом, задание управляющего параметра с увеличенной высокой скоростью отклика находится в компромиссном соотношении с рокочущим шумом.
[0119] С другой стороны, при первоначальном трогании с места транспортного средства скорость не является настолько высокой, как в ходе нормального движения, в силу чего высокочастотный шум, вызываемый посредством определения угла поворота и частоты вращения электромотора, практически не возникает по сравнению с периодом в ходе нормального движения. Таким образом, при первоначальном трогании с места, задание управляющего параметра с увеличенной высокой скоростью отклика практически не формирует рокочущий шум, аналогично периоду в ходе нормального движения. Соответственно, устройство управления для электрического транспортного средства этого варианта осуществления задает управляющий параметр с увеличенной высокой скоростью отклика только при первоначальном трогании с места, когда имеется небольшая потребность рассмотрения проблемы рокочущего шума, отдельно от управляющего параметра, связанного с управлением остановкой в ходе нормального движения.
[0120] Далее описываются преимущества устройства управления для электрического транспортного средства согласно варианту осуществления, применяемого к электрическому транспортному средству, в частности, для управления при первоначальном трогании с места, со ссылкой на фиг. 12 и фиг. 13.
[0121] Фиг. 12 является схемой, иллюстрирующей примерный результат управления посредством устройства управления для электрического транспортного средства согласно варианту осуществления. Фиг. 12 указывает результат управления в случае первоначального трогания с места из состояния остановки на дороге, идущей в подъем, с определенным уклоном, в порядке от начала: сигнал зажигания, значение команды управления крутящим моментом электромотора, продольное ускорение транспортного средства, частота вращения электромотора и расстояние отката. Пунктирная линия на схеме, указывающей сигнал зажигания, указывает состояние flg1. Пунктирная линия на схеме, указывающей значение команды управления крутящим моментом электромотора, указывает оцененное значение возмущающего крутящего момента, и штрихпунктирная линия с одной точкой указывает возмущения вследствие уклона.
[0122] Во время t0, сигнал зажигания, определенный на этапе S201 на фиг. 2, переходит из выключенного во включенное состояние. Затем задание flg1 равным 1 в процессе этапа S203 конфигурирует управляющий параметр таким образом, что он имеет высокую скорость отклика управления крутящим моментом электромотора, увеличенную по сравнению периодом в ходе нормального движения (см. этапы S712a-S712e). В это время, тогда как уклон поверхности дороги, на котором останавливается транспортное средство, представляет собой подъем, и оцененное значение возмущающего крутящего момента и значение команды управления крутящим моментом электромотора инициализируются равными 0. Соответственно, как видно из схемы, указывающей значение команды управления крутящим моментом электромотора, оцененное значение возмущающего крутящего момента отклоняется от возмущений вследствие уклона. Во время t0, фрикционный тормоз поддерживает состояние остановки транспортного средства на дороге, идущей в подъем.
[0123] Во время t1, торможение посредством фрикционного тормоза прекращается. В это время, вследствие flg1=1, процесс управления остановкой этапа S204 задается для управляющего параметра при первоначальном трогании с места. Соответственно, значение команды управления крутящим моментом электромотора регулируется посредством процесса управления остановкой на основе управляющего параметра, имеющего увеличенную высокую скорость отклика по сравнению с периодом в ходе нормального движения. С другой стороны, транспортное средство, в котором прекращается торможение за счет фрикционного тормоза, начинает откат.
[0124] Между временами t1 и t2, после определения состояния отката с абсолютным значением |ωm| частоты вращения электромотора, большим предварительно определенной частоты ωm1 вращения электромотора, когда абсолютное значение |ωm| частоты вращения электромотора определяется как сходящееся к значению, меньшему предварительно определенной частоты ωm2 вращения электромотора, на этапе S708 на фиг. 7, flg1 задается равным 0, и управляющий параметр возвращается к заданному значению управляющего параметра в ходе нормального движения. Из схемы, в момент t1,5 времени можно видеть, что частота вращения электромотора сходится к нулю, и откат прекращается.
[0125] После времени t2, можно видеть, что частота вращения электромотора сходится к 0, и состояние остановки транспортного средства поддерживается посредством процесса управления остановкой на основе управляющего параметра в ходе нормального движения.
[0126] Затем, в качестве сравнительного примера, приводится описание результата управления в случае, если управляющий параметр с увеличенной высокой скоростью отклика не задается при первоначальном трогании с места, со ссылкой на фиг. 13.
[0127] Во время t0, сигнал зажигания, определенный на этапе S201 на фиг. 2, переходит из выключенного во включенное состояние. Тогда как уклон поверхности дороги, на котором останавливается транспортное средство, представляет собой подъем, и оцененное значение возмущающего крутящего момента и значение команды управления крутящим моментом электромотора инициализируются равными 0. Соответственно, как видно из схемы, указывающей значение команды управления крутящим моментом электромотора, оцененное значение возмущающего крутящего момента отклоняется от возмущений вследствие уклона. Во время t0, фрикционный тормоз поддерживает состояние остановки транспортного средства на дороге, идущей в подъем.
[0128] Во время t1, торможение посредством фрикционного тормоза прекращается. В этом сравнительном примере, значение команды управления крутящим моментом электромотора вычисляется посредством процесса управления остановкой на основе управляющего параметра, идентичного параметру в ходе нормального движения. Как видно из схемы, транспортное средство, в котором распускается фрикционный тормоз, начинает откат.
[0129] Тогда как после распускания фрикционного тормоза, значение команды управления крутящим моментом электромотора регулируется посредством процесса управления остановкой на основе управляющего параметра, идентичного параметру в ходе нормального движения, значение команды управления крутящим моментом электромотора в этом примере еще не совпадает с возмущениями вследствие уклона в момент времени для времени t2. Следовательно, расстояние отката также продолжает увеличиваться даже во время t3, и транспортное средство, в итоге, останавливается в момент t3,5 времени.
[0130] Во время t4, частота вращения электромотора сходится к 0, и процесс управления остановкой поддерживает состояние остановки транспортного средства. Следует отметить, что можно видеть, что период времени до поддержания остановки транспортного средства и расстояния отката, является длительным по сравнению с процессом управления остановкой на основе управляющего параметра при первоначальном трогании с места, описанном со ссылкой на фиг. 13.
[0131] Таким образом, устройство управления для электрического транспортного средства согласно настоящему изобретению уменьшает период времени, требуемый для сопоставления оцененного значения возмущающего крутящего момента с возмущениями вследствие уклона и управления крутящим моментом электромотора, чтобы поддерживать остановку транспортного средства и расстояние отката по сравнению с традиционным примером.
[0132] Как описано выше, устройство управления для электрического транспортного средства первого варианта осуществления представляет собой устройство управления для электрического транспортного средства, включающее в себя электромотор, который формирует крутящий момент приведения в движение и рекуперативный крутящий момент, соответствующий операции нажатия педали акселератора водителем. Устройство управления для электрического транспортного средства определяет то, выполнена или нет операция трогания с места транспортного средства водителем, вычисляет оцененное значение Td возмущающего крутящего момента, необходимое для поддержания состояния остановки транспортного средства, соответствующего возмущениям, действующим на транспортное средство, и осуществляет управление таким образом, что крутящий момент приведения в движение электромотора сходится к оцененному значению Td возмущающего крутящего момента, когда транспортное средство определяется как находящееся в момент времени непосредственно перед остановкой транспортного средства в ходе движения, или определяется как находящееся в ходе операции трогания с места. Затем устройство управления для электрического транспортного средства управляет скоростью отклика крутящего момента приведения в движение на возмущения, действующие на транспортное средство, и увеличивает скорость отклика крутящего момента приведения в движение электромотора по сравнению со скоростью отклика крутящего момента приведения в движение непосредственно перед остановкой транспортного средства, когда операция трогания с места определяется как выполняемая.
[0133] Соответственно, при первоначальном трогании с места транспортного средства, обеспечивается увеличение скорости отклика крутящего момента электромотора, в частности, на возмущения вследствие уклона по сравнению с периодом в ходе нормального движения, в силу чего расстояние отката транспортного средства, который возникает, когда, например, тормозная сила тормоза прекращает действовать, может уменьшаться. Не допускается возникновение у водителя беспокойства, вызываемого посредством возникновения отката.
[0134] Устройство управления для электрического транспортного средства первого варианта осуществления определяет то, что операция трогания с места транспортного средства выполнена, когда устройство управления для электрического транспортного средства определяет переход сигнала переключателя зажигания транспортного средства из выключенного состояния во включенное состояние. Это обеспечивает надежное определение при первоначальном трогании с места транспортного средства.
[0135] Устройство управления для электрического транспортного средства первого варианта осуществления использует систему управления с обратной связью по скорости/частоте вращения, которая выполняет обратную связь для определенной частоты ωm вращения электромотора таким образом, чтобы вычислять оцененное значение возмущающего крутящего момента. Когда операция трогания с места определяется как выполняемая, устройство управления для электрического транспортного средства увеличивает усиление Kvref обратной связи системы управления с обратной связью по скорости/частоте вращения, чтобы увеличивать скорость отклика крутящего момента приведения в движение. Таким образом, устройство управления для электрического транспортного средства этого варианта осуществления увеличивает высокую скорость отклика оцененного значения Td возмущающего крутящего момента на возмущения вследствие уклона, соответствующие усилению Kvref при выполнении обратной связи частоты ωm вращения электромотора с тем, чтобы увеличивать скорость отклика крутящего момента электромотора на возмущения вследствие уклона. Соответственно, обеспечивается простое изменение скорости отклика крутящего момента электромотора между периодом в ходе нормального движения и периодом при первоначальном трогании с места, в силу чего управление скоростью отклика легко выполняется согласно ситуации при движении транспортного средства.
[0136] Устройство управления для электрического транспортного средства первого варианта осуществления включает в себя фильтр Hz(s), имеющий предварительно определенный коэффициент сглаживания, состоящий из квадратичного выражения в качестве числителя и квадратичного выражения в качестве знаменателя, и вычисляет оцененное значение Td возмущающего крутящего момента на основе коэффициента сглаживания фильтра. Когда операция трогания с места транспортного средства определяется как выполняемая, коэффициент ζc сглаживания знаменателя фильтра Hz(s) снижается, чтобы увеличивать скорость отклика крутящего момента приведения в движение. Таким образом, устройство управления для электрического транспортного средства этого варианта осуществления увеличивает высокую скорость отклика оцененного значения Td возмущающего крутящего момента на возмущения вследствие уклона, соответствующие коэффициенту ζc сглаживания знаменателя фильтра Hz(s) с тем, чтобы увеличивать скорость отклика крутящего момента электромотора на возмущения вследствие уклона. Соответственно, обеспечивается простое изменение скорости отклика крутящего момента электромотора между периодом в ходе нормального движения и периодом при первоначальном трогании с места, в силу чего управление скоростью отклика легко выполняется согласно ситуации при движении транспортного средства.
[0137] Устройство управления для электрического транспортного средства первого варианта осуществления включает в себя фильтр H(s), имеющий предварительно определенную постоянную времени, и вычисляет оцененное значение Td возмущающего крутящего момента на основе постоянной времени фильтра. Когда операция трогания с места транспортного средства определяется как выполняемая, постоянная времени снижается, чтобы увеличивать скорость отклика крутящего момента приведения в движение. Таким образом, устройство управления для электрического транспортного средства этого варианта осуществления увеличивает высокую скорость отклика оцененного значения Td возмущающего крутящего момента на возмущения вследствие уклона, соответствующие постоянной времени фильтра H(s) нижних частот с тем, чтобы увеличивать скорость отклика крутящего момента электромотора на возмущения вследствие уклона. Соответственно, обеспечивается простое изменение скорости отклика крутящего момента электромотора между периодом в ходе нормального движения и периодом при первоначальном трогании с места, в силу чего управление скоростью отклика легко выполняется согласно ситуации при движении транспортного средства.
[0138] Устройство управления для электрического транспортного средства первого варианта осуществления использует систему управления с обратной связью по скорости/частоте вращения, которая выполняет обратную связь для значений, при которых скользящее среднее на основе предварительно определенного числа дискретизаций применяется к определенной частоте ωm вращения электромотора с тем, чтобы вычислять оцененное значение Td возмущающего крутящего момента. Когда операция трогания с места транспортного средства определяется как выполняемая, число дискретизаций снижается, чтобы увеличивать скорость отклика крутящего момента приведения в движение. Устройство управления для электрического транспортного средства этого варианта осуществления сокращает число дискретизаций частоты ωm вращения электромотора в процессе определения скользящего среднего, выполняемом при вычислении частоты ωm вращения электромотора с тем, чтобы уменьшать мертвое время, вызываемое посредством задержки определения частоты ωm вращения электромотора. В таком случае, стабильность управления обеспечивается, даже если увеличивается высокая скорость отклика оцененного значения Td возмущающего крутящего момента на возмущения вследствие уклона.
[0139] Кроме того, устройство управления для электрического транспортного средства первого варианта осуществления выполняет процесс управления демпфированием вибрации, который заставляет электромотор формировать крутящий момент демпфирования вибрации для уменьшения вибрации, сформированной на кузове транспортного средства. Процесс управления демпфированием вибрации использует систему управления с обратной связью для того, чтобы вычислять крутящий момент TF/B F/B-компенсации (крутящий момент демпфирования вибрации), и когда операция трогания с места транспортного средства определяется как выполняемая, усиление KFB обратной связи системы управления с обратной связью задается меньше усиления KFB обратной связи непосредственно перед остановкой транспортного средства. Таким образом, устройство управления для электрического транспортного средства этого варианта осуществления задает усиление KFB обратной связи, используемое в процессе управления демпфированием вибрации, равным небольшому значению по сравнению с периодом в ходе движения с тем, чтобы уменьшать перерегулирование крутящего момента TF/B F/B-компенсации (крутящего момента демпфирования вибрации) до значения целевого крутящего момента. В таком случае, стабильность управления обеспечивается, даже если увеличивается высокая скорость отклика оцененного значения Td возмущающего крутящего момента на возмущения вследствие уклона.
[0140] Когда абсолютное значение определенного значения частоты ωm вращения электромотора увеличивается до значения, равного или большего предварительно определенному первому значению ωm1 определения отката, и затем уменьшается до значения, равного или меньшего предварительно определенному второму значению ωm2 определения отката, устройство управления для электрического транспортного средства первого варианта осуществления уменьшает скорость отклика крутящего момента приведения в движение, увеличенную тогда, когда операция трогания с места транспортного средства определяется как выполняемая, до эквивалента скорости отклика крутящего момента приведения в движение в ходе нормального движения. Альтернативно, после истечения предварительно определенного периода времени (значения T1 счетчика таймера) с момента, когда операция трогания с места транспортного средства определяется как выполняемая, устройство управления для электрического транспортного средства первого варианта осуществления уменьшает скорость отклика крутящего момента приведения в движение до эквивалента скорости отклика крутящего момента приведения в движение в ходе нормального движения. Таким образом, устройство управления для электрического транспортного средства этого варианта осуществления увеличивает только скорость отклика в начале трогания с места транспортного средства сразу после первоначального трогания с места, за счет этого обеспечивая уменьшение отката при первоначальном трогании с места. Одновременно, после момента первоначального трогания с места, скорость отклика регулируется до соответствующей скорости отклика, при которой перерегулирование не увеличивается, за счет этого обеспечивая стабильность управления в ходе нормального движения.
[0141] Устройство управления для электрического транспортного средства первого варианта осуществления дополнительно включает в себя средство 12 определения уклона, которое определяет уклон поверхности дороги, на которой останавливается транспортное средство с тем, чтобы увеличивать скорость отклика крутящего момента приведения в движение по мере того, как определенный уклон становится большим. Это обеспечивает быстрое повышение оцененного значения Td возмущающего крутящего момента даже, например, при крутом уклоне, за счет этого уменьшая откат транспортного средства.
[0142] Второй вариант осуществления
Далее описывается устройство управления для электрического транспортного средства второго варианта осуществления. Устройство управления для электрического транспортного средства второго варианта осуществления отличается от устройства управления для электрического транспортного средства первого варианта осуществления, описанного выше, в частности, по времени задания управляющего параметра при первоначальном трогании с места в процессе первоначального трогания с места.
[0143] Для времени задания управляющего параметра при первоначальном трогании с места, в первом варианте осуществления, задание flg1 равным 1, когда сигнал зажигания подтверждается как переходящий из выключенного состояния во включенное состояние, заставляет управляющий параметр при первоначальном трогании с места задаваться в процессе этапа S712. Таким образом, первый вариант осуществления имеет конфигурацию, в которой когда водитель включает переключатель первоначального трогания с места, чтобы активировать систему транспортного средства, транспортное средство определяется как находящееся в состоянии первоначального трогания с места, в силу чего управляющий параметр при первоначальном трогании с места немедленно задается.
[0144] В этом варианте осуществления, в дополнение к подтверждению перехода сигнала зажигания из выключенного состояния во включенное состояние, контроллер 2 задает flg1 равным 1, когда позиция акселератора подтверждается как нулевая. Кроме того, когда абсолютное значение частоты вращения электромотора увеличивается до значения, равного или большего предварительно определенному значению, и обнаруживается, что начинается откат, контроллер 2 определяет то, что транспортное средство находится в состоянии первоначального трогания с места, за счет этого задавая управляющий параметр при первоначальном трогании с места. Далее подробно описывается процесс первоначального трогания с места в этом варианте осуществления со ссылкой на фиг. 14.
[0145] На этапе S701, контроллер 2 определяет то, переходит или нет сигнал переключателя зажигания из выключенного во включенное состояние. Когда сигнал переключателя зажигания переходит из выключенного состояния во включенное, контроллер 2 выполняет процесс этапа S715. Когда сигнал переключателя зажигания остается во включенном состоянии, контроллер 2 выполняет процесс этапа S703.
[0146] На этапе S715, контроллер 2 определяет то, является или нет позиция акселератора нулевой, т.е. то, выполнена или нет операция нажатия педали акселератора водителем. Когда позиция акселератора является нулевой, т.е. операция нажатия педали акселератора водителем не выполнена, выполняется процесс этапа S716. Когда позиция акселератора не является нулевой, и водитель нажимает педаль акселератора, выполняется процесс этапа S713. Когда водитель нажимает педаль акселератора, откат транспортного средства по существу не возникает, в силу чего контроллер 2 задает управляющий параметр в ходе нормального движения на этапе S713 таким образом, чтобы завершать процесс первоначального трогания с места.
[0147] На этапе S716, контроллер 2 определяет то, начинается или нет откат. В частности, определяется то, превышает или нет абсолютное значение частоты вращения электромотора транспортного средства |ωm| частоту ωm1 вращения электромотора, в качестве сравнительного значения. Частота ωm1 вращения электромотора предварительно определена посредством эксперимента и т.п. и представляет собой частоту вращения электромотора, допускающую определение того, что транспортное средство начинает откат. Значение частоты вращения электромотора транспортного средства для сравнения использует абсолютное значение для обеспечения совместного обнаружения как случая, в котором с которого транспортное средство скатывается назад на подъеме, так и случая, в котором транспортное средство скатывается вперед на спуске. Когда "|ωm| > ωm1" удовлетворяется, выполняется процесс этапа S702. Когда "|ωm| > ωm1" не удовлетворяется, выполняется процесс этапа S717.
[0148] На этапе S702, контроллер 2 задает каждое из таймера 1, flg1 и flg2. Значение, заданное в таймере 1, представляет собой период времени от момента определения того, что сигнал переключателя зажигания переходит во включенное состояние, и транспортное средство начинает откат, и возмущения вследствие уклона совпадают с оцененным значением Td возмущающего крутящего момента, вычисленным посредством контроллера 2, до момента, когда крутящий момент электромотора управляется со значением Tm* команды управления крутящим моментом электромотора, чтобы поддерживать состояние остановки транспортного средства. Значение, заданное в таймере 1, является значением, предварительно адаптированным посредством эксперимента и т.п.
[0149] После этого, контроллер 2 задает flg1 и flg2 равными 1. Flg1=1 в этом варианте осуществления указывает то, что сигнал зажигания переходит из выключенного во включенное состояние, и позиция акселератора является нулевой. Flg2=1 указывает, аналогично первому варианту осуществления, то, что транспортное средство начинает откат. В этом варианте осуществления, flg1=1 и flg2=1 задаются таким образом, чтобы указывать то, что транспортное средство находится в состоянии первоначального трогания с места. После задания, контроллер 2 выполняет процесс S711.
[0150] На S711, определяется то, удовлетворяется или нет flg=1. В процессе S702, flg задается равным 1, в силу чего контроллер 2 выполняет процесс этапа S712 в качестве следующего этапа.
[0151] На этапе S712, управляющий параметр при первоначальном трогании с места задается в качестве управляющего параметра, используемого при вычислении оцененного значения Td возмущающего крутящего момента. Задание управляющего параметра при первоначальном трогании с места выполняется аналогично первому варианту осуществления (см. фиг. 11). После того, как управляющий параметр при первоначальном трогании с места задается, процесс первоначального трогания с места завершается.
[0152] Далее приводится описание последовательности операций в случае, если "|ωm| > ωm1" не удовлетворяется на этапе S716. На этапе S717, поскольку сигнал зажигания переходит из выключенного во включенное состояние, и позиция акселератора является нулевой, контроллер 2 задает flg1 равным 1. Поскольку "|ωm| > ωm1" не удовлетворяется, и транспортное средство еще не начинает откат, flg2 задается равным 0. После задания, контроллер 2 выполняет процесс S713.
[0153] На этапе S713, управляющий параметр в ходе нормального движения задается в качестве управляющего параметра, используемого при вычислении оцененного значения Td возмущающего крутящего момента. После того, как управляющий параметр в ходе нормального движения задается, один цикл процесса первоначального трогания с места завершается.
[0154] Затем при выполнении процесса S701 в следующем цикле, сигнал переключателя зажигания остается во включенном состоянии, в силу чего контроллер 2 выполняет процесс этапа S703.
[0155] На этапе S703, контроллер 2 определяет состояние flg1. На этапе S717 в предыдущем цикле, flg1 задается равным 1, в силу чего после этого выполняется процесс этапа S704.
[0156] На этапе S704, контроллер 2 определяет то, является или нет позиция акселератора нулевой. Когда позиция акселератора является нулевой, выполняется процесс этапа S705, чтобы определять то, начинается или нет откат транспортного средства. Когда позиция акселератора не является нулевой, т.е. когда водитель нажимает педаль акселератора, транспортное средство определяется как переходящее в состояние движения, согласно намерению водителя, например, началу ускорения и прекращению нахождения в состоянии первоначального трогания с места, в силу чего flg задается равным 0 на этапе S710. Затем на этапе S713, контроллер 2 задает управляющий параметр в ходе нормального движения в качестве управляющего параметра, используемого при вычислении оцененного значения Td возмущающего крутящего момента, в силу чего процесс первоначального трогания с места завершается.
[0157] На этапе S704, аналогично первому варианту осуществления, предыдущее значение Tm1_z значения Tm1* первого целевого крутящего момента может сравниваться с предыдущим значением Tm2_z значения Tm2* второго целевого крутящего момента. Когда "Tm2_z > Tm1_z" удовлетворяется, выполняется процесс этапа S705. Когда "Tm2_z > Tm1_z" не удовлетворяется, определяется то, что транспортное средство начинает движение, согласно намерению водителя, и flg задается равным 0 на этапе S710. После этого выполняется процесс этапа S711.
[0158] Далее приводится описание последовательности операций в случае, если контроллер 2 определяет "позиция акселератора=0" на этапе S704. В случае "позиция акселератора=0", контроллер 2 выполняет процесс S705 и определяет состояние flg2. Транспортное средство в этот момент времени еще не начинает откат, так что flg2=0. Соответственно, контроллер 2 затем выполняет процесс этапа S706.
[0159] На этапе S706, контроллер 2 определяет то, удовлетворяется или нет "абсолютное значение |ωm| частоты вращения электромотора > частота ωm1 вращения электромотора" для определения того, начинает или нет транспортное средство откат. Как описано выше, частота ωm1 вращения электромотора представляет собой частоту вращения электромотора, допускающую определение того, что транспортное средство начинает откат, а также значения, предварительно определенного посредством эксперимента, и т.п. Когда "|ωm| > ωm1" не удовлетворяется, транспортное средство еще не начинает откат. После этого, контроллер 2 задает управляющий параметр в ходе нормального движения на этапе S713 и завершает процесс первоначального трогания с места. Когда "|ωm| > ωm1" удовлетворяется, выполняется процесс этапа S707.
[0160] На этапе S707, поскольку "|ωm| > ωm1" удовлетворяется, и определяется то, что транспортное средство начинает откат, flg2 задается равным 1, и значение T1 счетчика задается в таймере 1. После этого, контроллер 2 определяет состояние flg1 на следующем этапе S711. Значение T1 счетчика представляет собой период времени от определения транспортного средства как начинающего откат и находящегося в состоянии первоначального трогания с места до поддержания состояния остановки транспортного средства впоследствии. Значение T1 счетчика является значением, предварительно адаптированным посредством эксперимента и т.п.
[0161] На этапе S711, поскольку состояние, в котором flg1 задается равным 1 в процессе этапа S717, продолжается, flg1=1 удовлетворяется. Соответственно, контроллер 2 задает управляющий параметр при первоначальном трогании с места на следующем этапе S712 и завершает процесс первоначального трогания с места.
[0162] В этот момент времени, flg1, flg2 и таймер 1 заданы равными flg1=1, flg2=1 и таймер 1=T1, соответственно. Согласно этой предпосылке, ниже описывается процесс первоначального трогания с места в следующем цикле.
[0163] Как описано выше, поскольку flg1=1 и flg2=1 задаются в той мере, в какой "позиция акселератора=0" удовлетворяется на этапе S704, контроллер 2 выполняет процесс этапа S708. Когда "позиция акселератора=0" не удовлетворяется, контроллер 2 определяет то, что транспортное средство начинает движение, согласно намерению водителя, и прекращает нахождение в состоянии первоначального трогания с места. После этого, контроллер 2 задает flg равным 0 на этапе S710 и задает управляющий параметр в ходе нормального движения на этапе S713. После задания, процесс первоначального трогания с места завершается.
[0164] На этапе S708, состояние отката определяется. В случае "таймер 1=0", или в случае, если абсолютное значение |ωm| частоты вращения электромотора < частота ωm2 вращения электромотора" удовлетворяется, откат транспортного средства определяется как уменьшающийся, и выполняется процесс этапа S710. Частота ωm2 вращения электромотора предварительно определена посредством эксперимента и т.п. и представляет собой частоту вращения электромотора, допускающую определение того, что транспортное средство начинает откат. Когда как "таймер 1=0" и "|ωm| < ωm2" не удовлетворяются, транспортное средство определяется как находящееся в ходе отката. Далее выполняется процесс этапа S709 для выполнения процесса обратного отсчета таймера 1.
[0165] На этапе S709, значение счетчика таймера 1 вычитается посредством единицы. Таким образом, в ходе отката, значение счетчика таймера 1 отсчитывается в обратном порядке для каждого периода работы до тех пор, пока значение счетчика таймера 1 не станет равным нулю, или "|ωm| < ωm2" удовлетворяется до того, как определяется как уменьшающийся, на этапе S708. После этого, когда любое из "таймер 1=0" и "|ωm| < ωm2" удовлетворяется на этапе S708, контроллер 2 задает управляющий параметр в ходе нормального движения и завершает процесс первоначального трогания с места.
[0166] Как описано выше, устройство управления для электрического транспортного средства второго варианта осуществления определяет то, что операция трогания с места транспортного средства выполнена, когда устройство управления для электрического транспортного средства определяет переход сигнала переключателя зажигания транспортного средства из выключенного состояния во включенное состояние, позиция акселератора является нулевой, и абсолютное значение частоты ωm вращения электромотора, в общем, равно или превышает предварительно определенное значение ωm1. Это обеспечивает выполнение задания управляющего параметра с увеличенной скоростью отклика только во время, в которое начинается откат транспортного средства. Соответственно, на поверхности дороги, на которой откат, по сути, не возникает, к примеру, на ровной дороге, задание управляющего параметра в ходе нормального движения выполняется, даже если сигнал переключателя зажигания переходит из выключенного во включенное состояние. Затем выполнение задания управляющего параметра при первоначальном трогании с места обеспечивается в более соответствующее время, подходящее для объекта, чтобы уменьшать расстояние отката.
[0167] Настоящее изобретение не ограничено вышеописанными вариантами осуществления, и возможны различные модификации и варианты применения. Например, вышеприведенное пояснение описывает, что значение Tm* команды управления крутящим моментом электромотора сходится к значению Td команды управления возмущающим крутящим моментом по мере того, как уменьшается частота вращения электромотора 4. Тем не менее, параметр скорости/частоты вращения, такой как скорость вращения колес, скорость кузова транспортного средства и частота вращения ведущего вала, имеет пропорциональное соотношение с частотой вращения электромотора 4. Затем значение Tm* команды управления крутящим моментом электромотора может сходиться к оцененному значению Td возмущающего крутящего момента по мере того, как уменьшается параметр скорости/частоты вращения, пропорциональный частоте вращения электромотора 4.
[0168] Хотя пояснение приводится согласно тому, что управляющий параметр при первоначальном трогании с места задается для того, чтобы увеличивать скорость отклика крутящего момента электромотора, иногда возникает случай, в котором на нестабильной поверхности дороги с низким коэффициентом трения с поверхностью дороги, например, на обледеневшей поверхности дороги и на заснеженной дороге, увеличенная скорость отклика приводит к тому, что перерегулирование увеличивается, в силу чего затруднительно поддерживать стабильность управления. Соответственно, коэффициент трения с поверхностью дороги и т.п. может определяться таким образом, чтобы запрещать увеличение скорости отклика крутящего момента электромотора в зависимости от состояния поверхности дороги.
[0169] В устройстве управления для электрического транспортного средства согласно настоящему изобретению, микрофон и камера могут быть дополнительно расположены для того, чтобы определять операцию трогания с места транспортного средства водителем.
[0170] Кроме того, в вышеприведенном описании, оцененное значение возмущающего крутящего момента при первоначальном трогании с места инициализируется равным предварительно определенному значению (например, эквивалентному ровной дороге) в ходе прекращения работы системы транспортного средства. Тем не менее, без обязательного ограничения этим, оцененное значение возмущающего крутящего момента в ходе прекращения работы может сохраняться в запоминающем устройстве таким образом, чтобы задавать оцененное значение возмущающего крутящего момента при первоначальном трогании с места равным сохраненному оцененному значению возмущающего крутящего момента. В этом случае, значение команды управления крутящим моментом электромотора при первоначальном трогании с места управляется таким образом, что оно сходится к оцененному значению возмущающего крутящего момента, сохраненному в ходе прекращения работы системы транспортного средства.
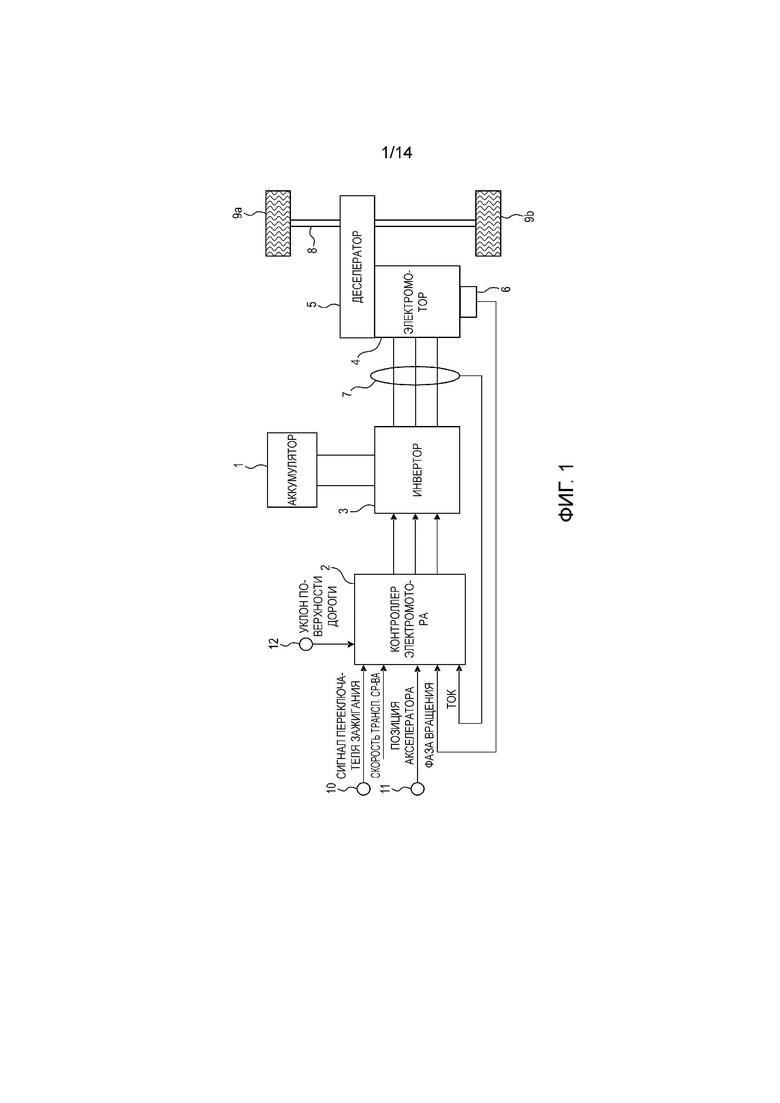
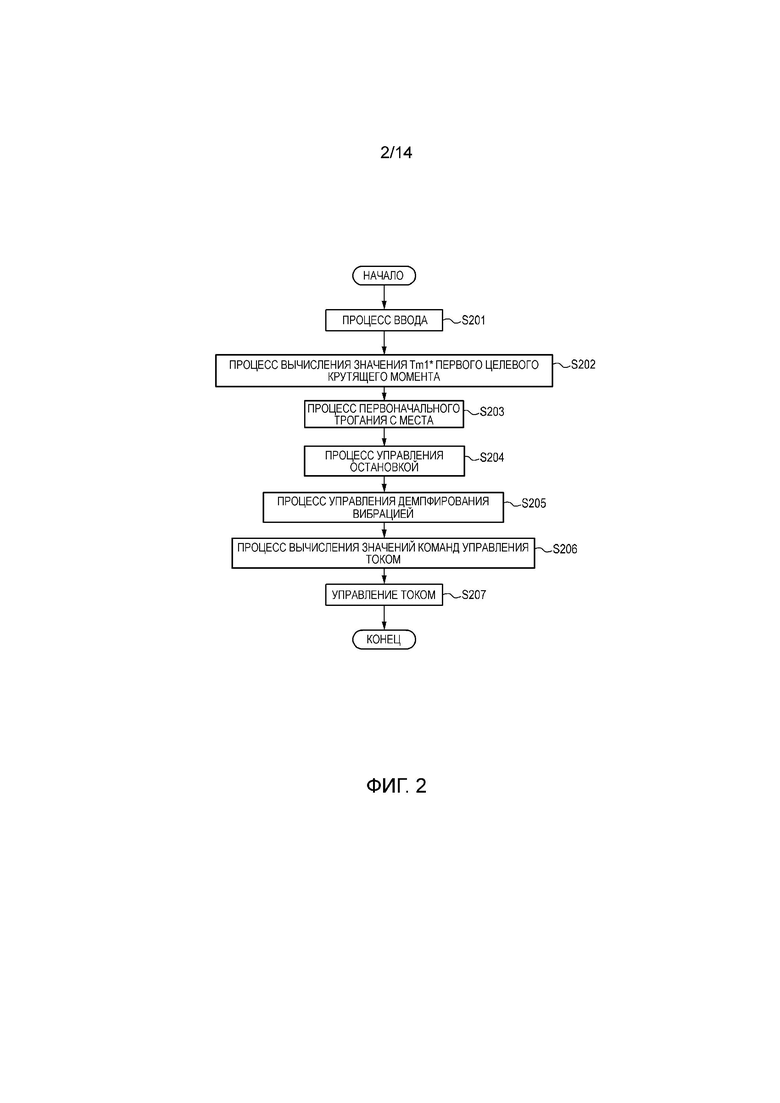
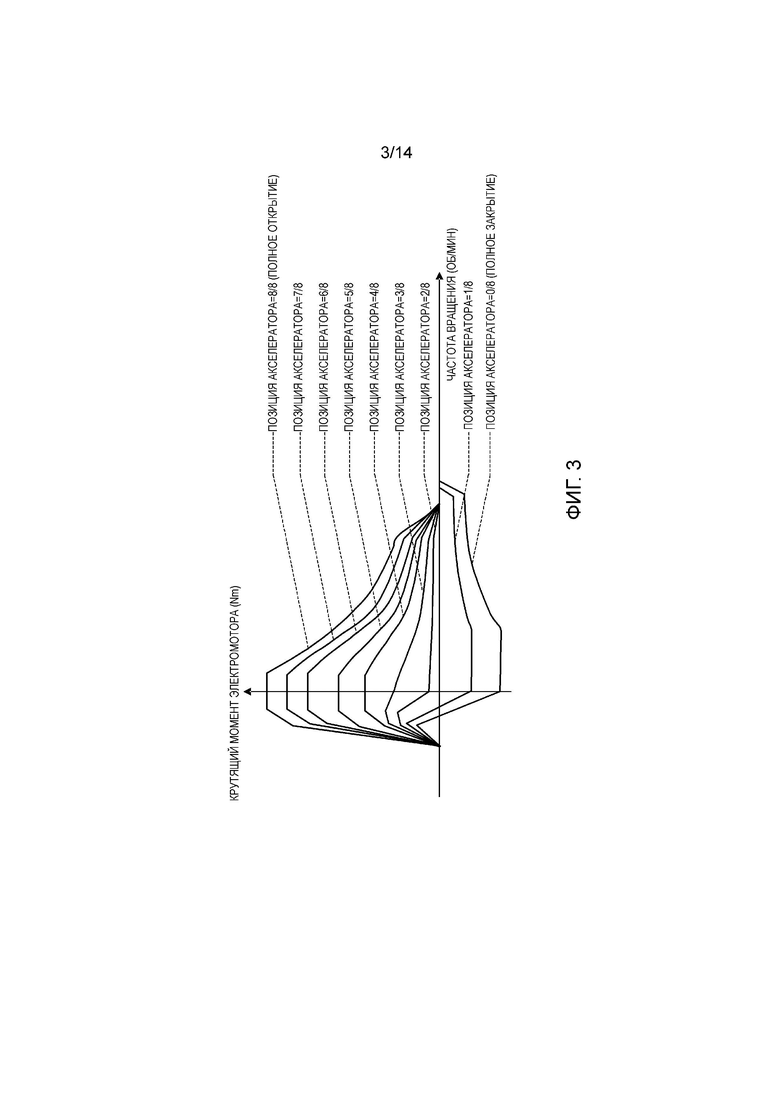
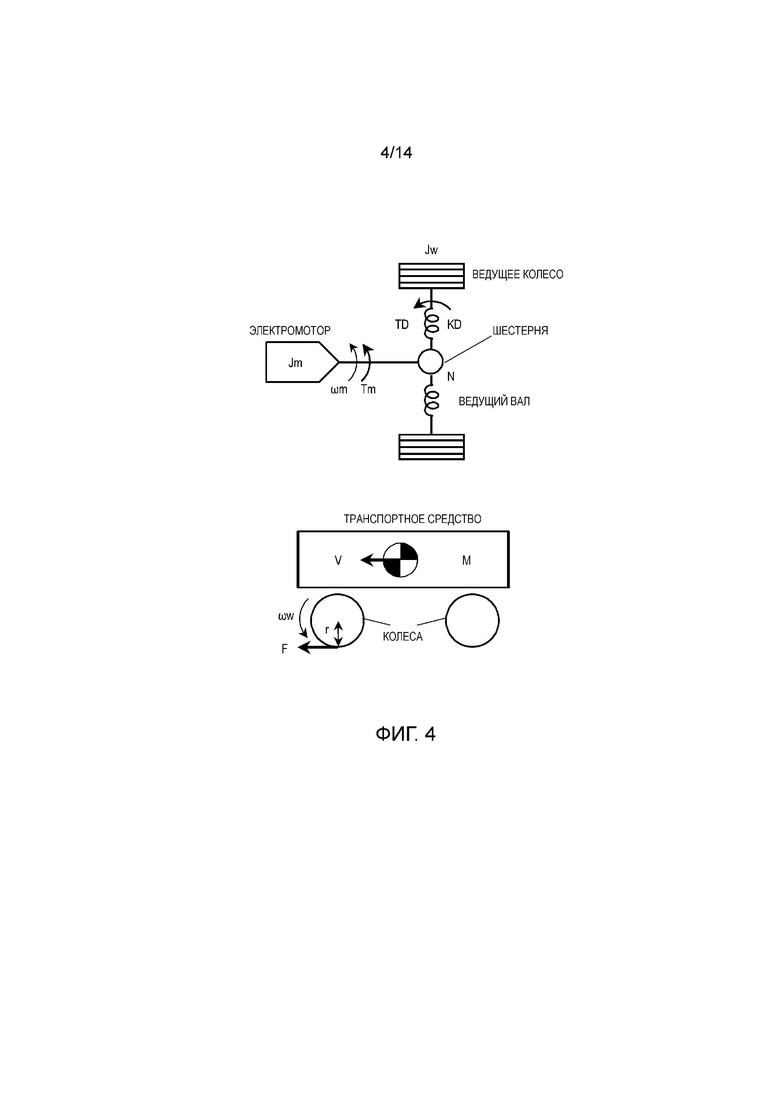
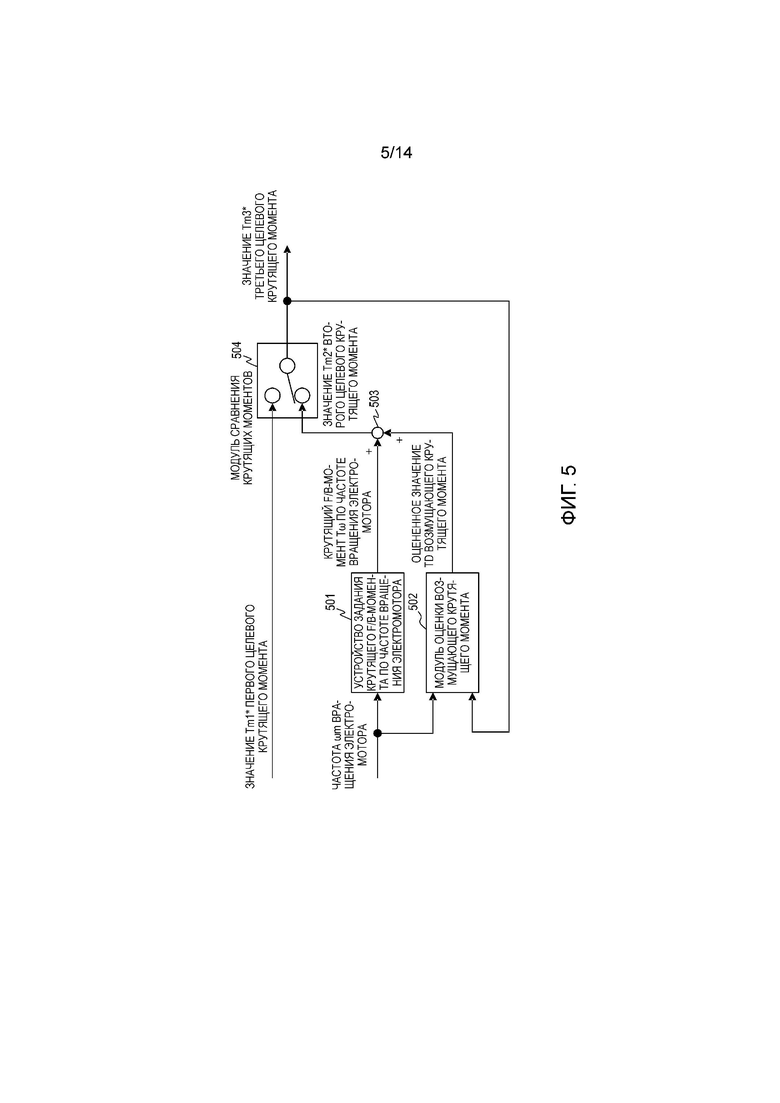
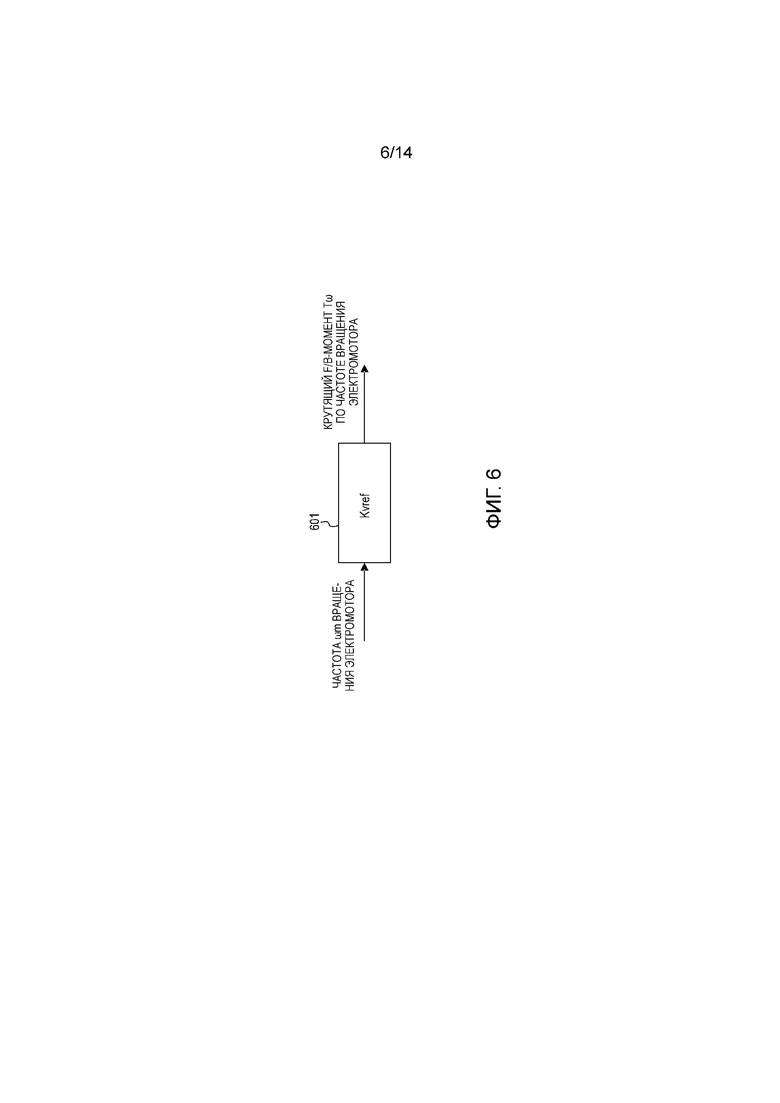
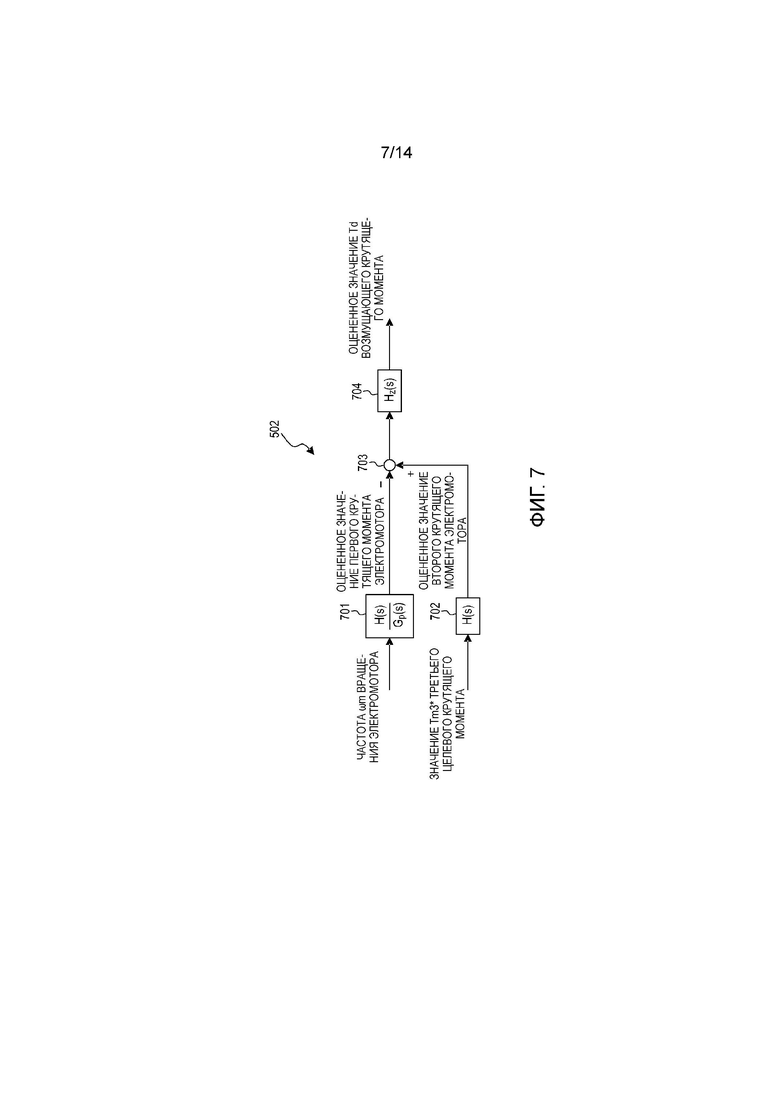
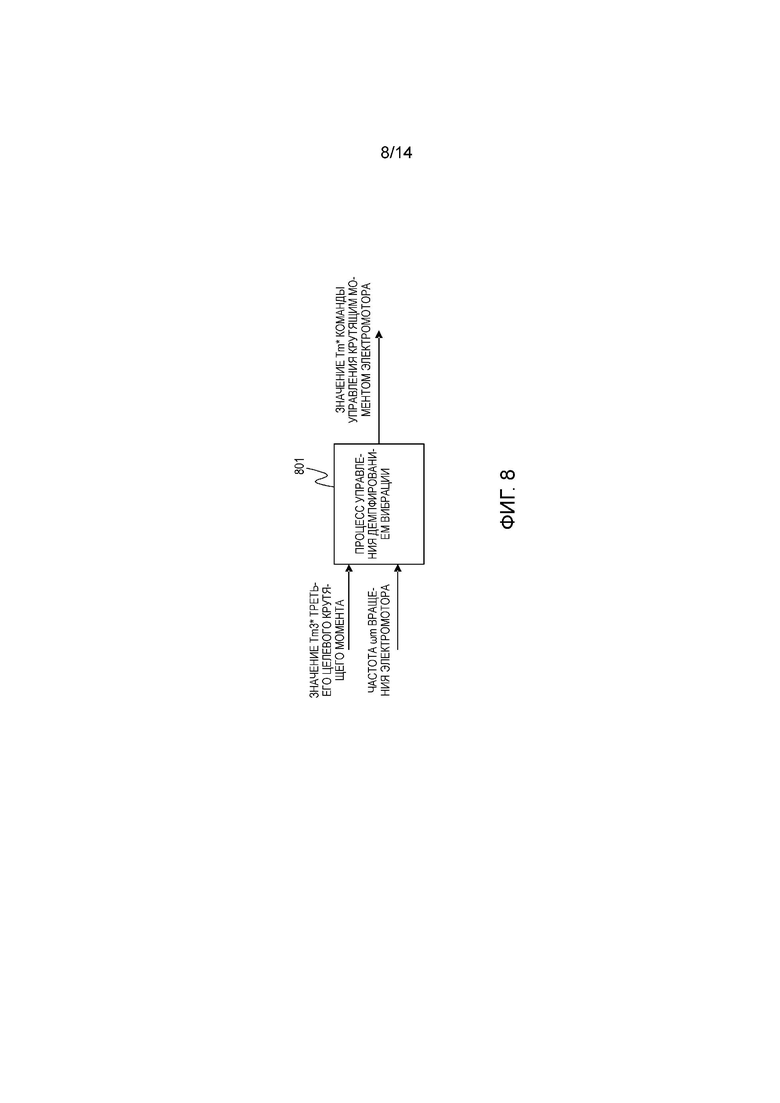
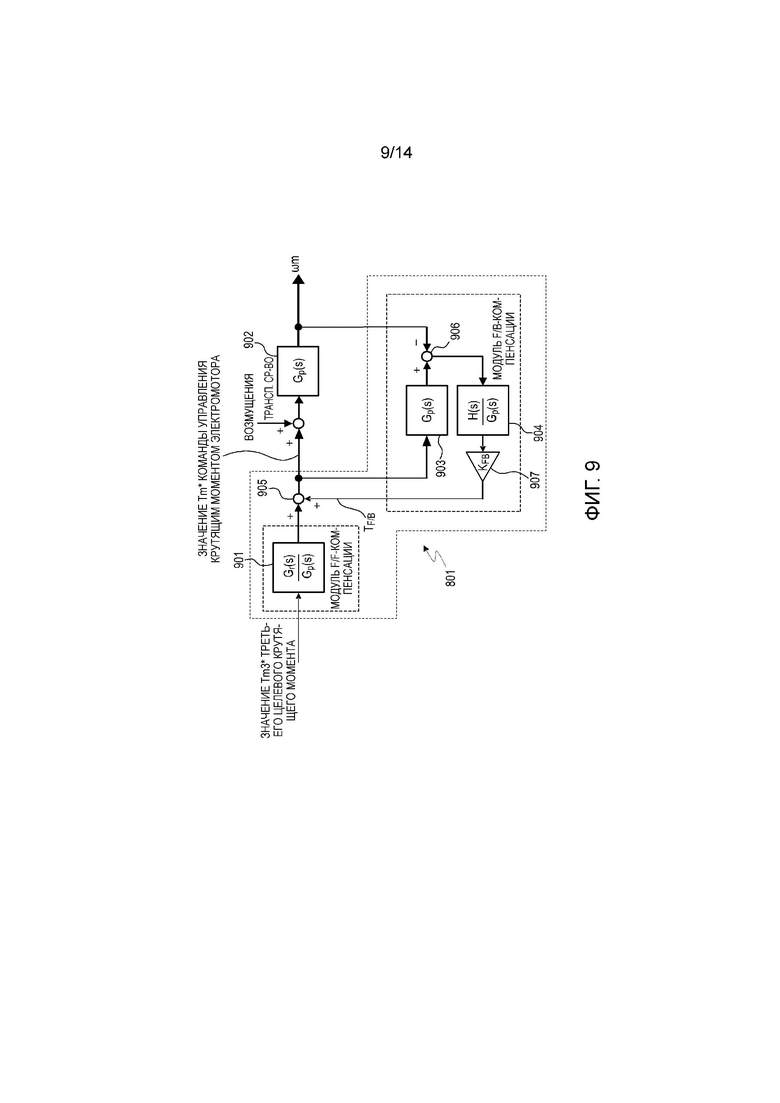
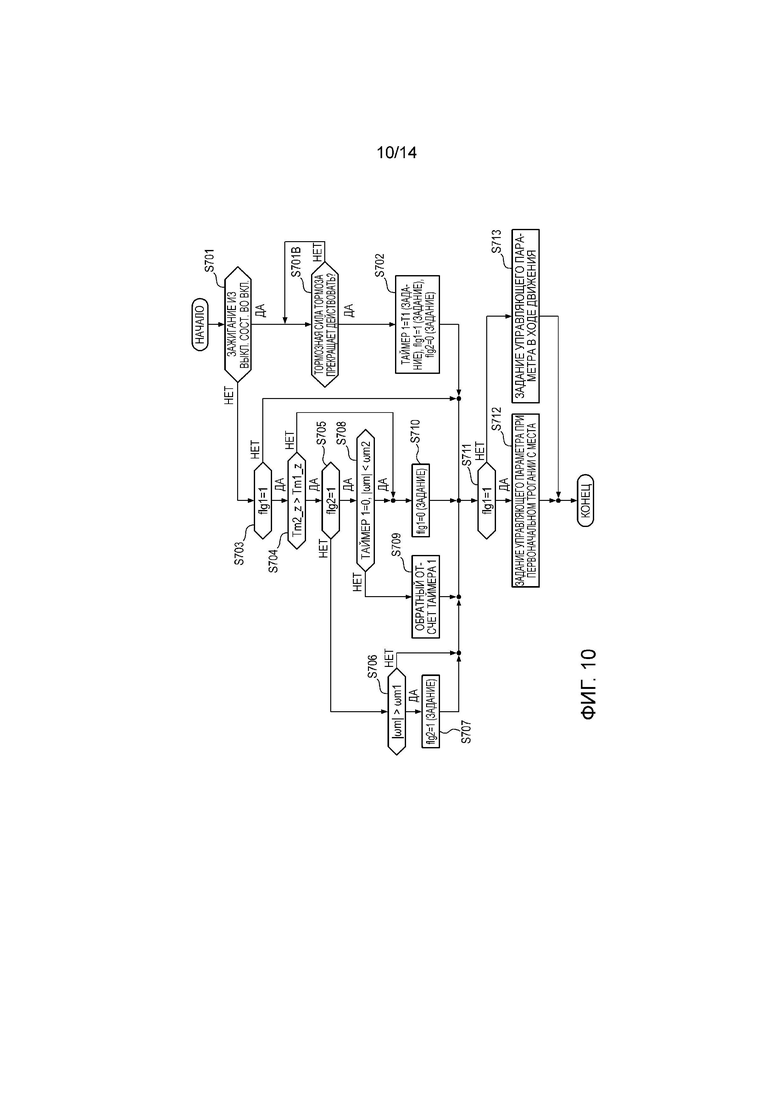
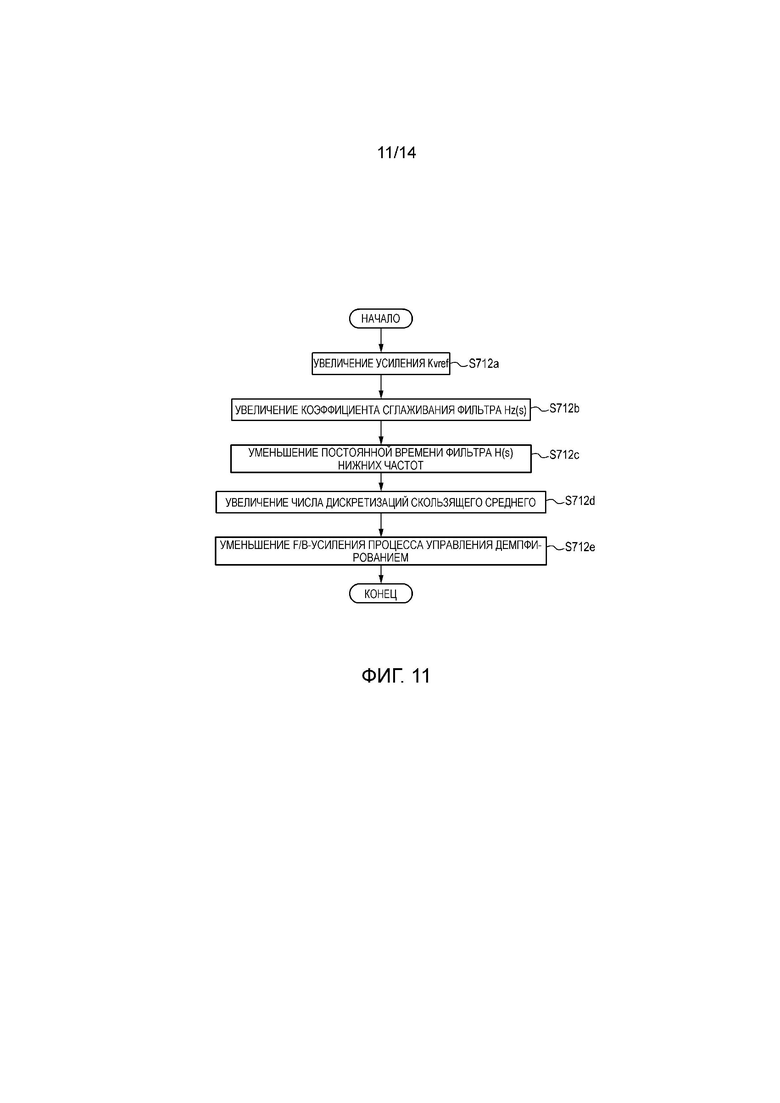
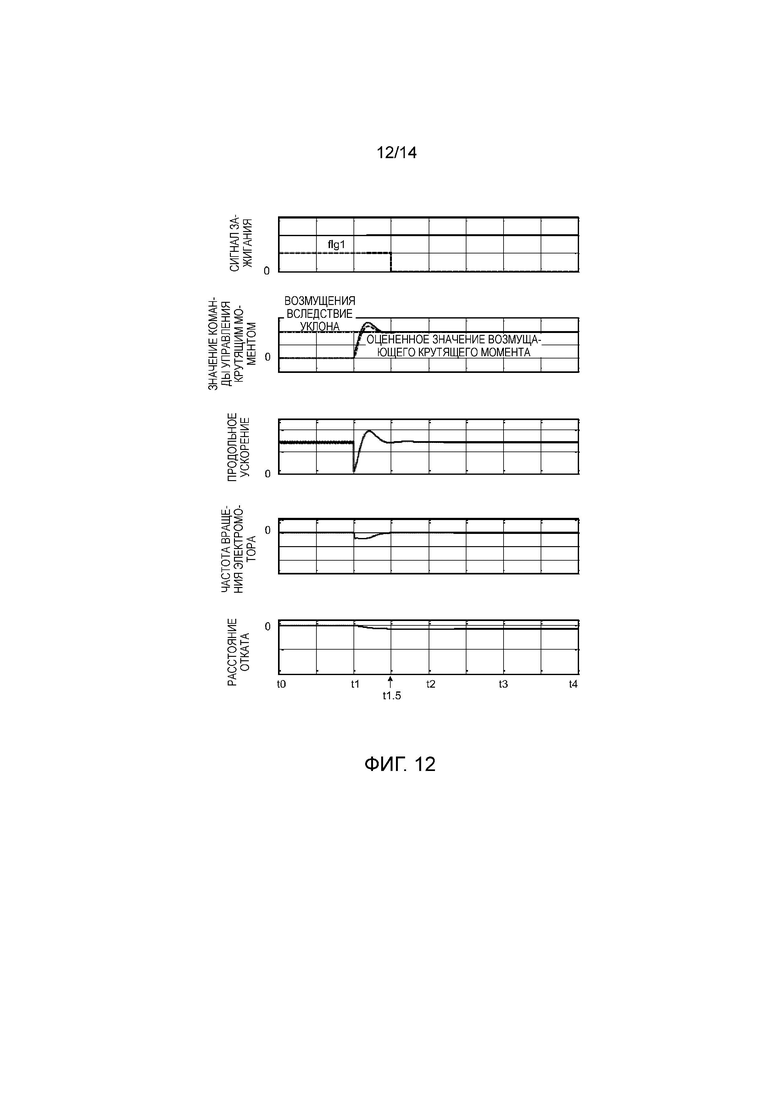
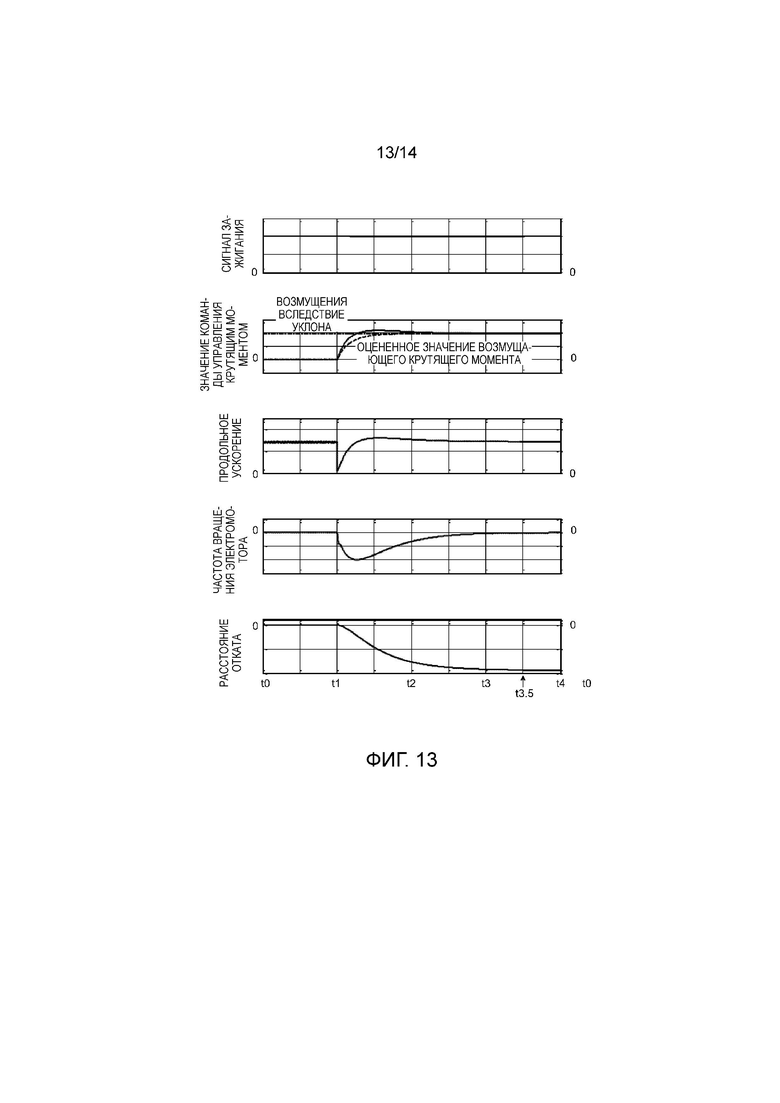
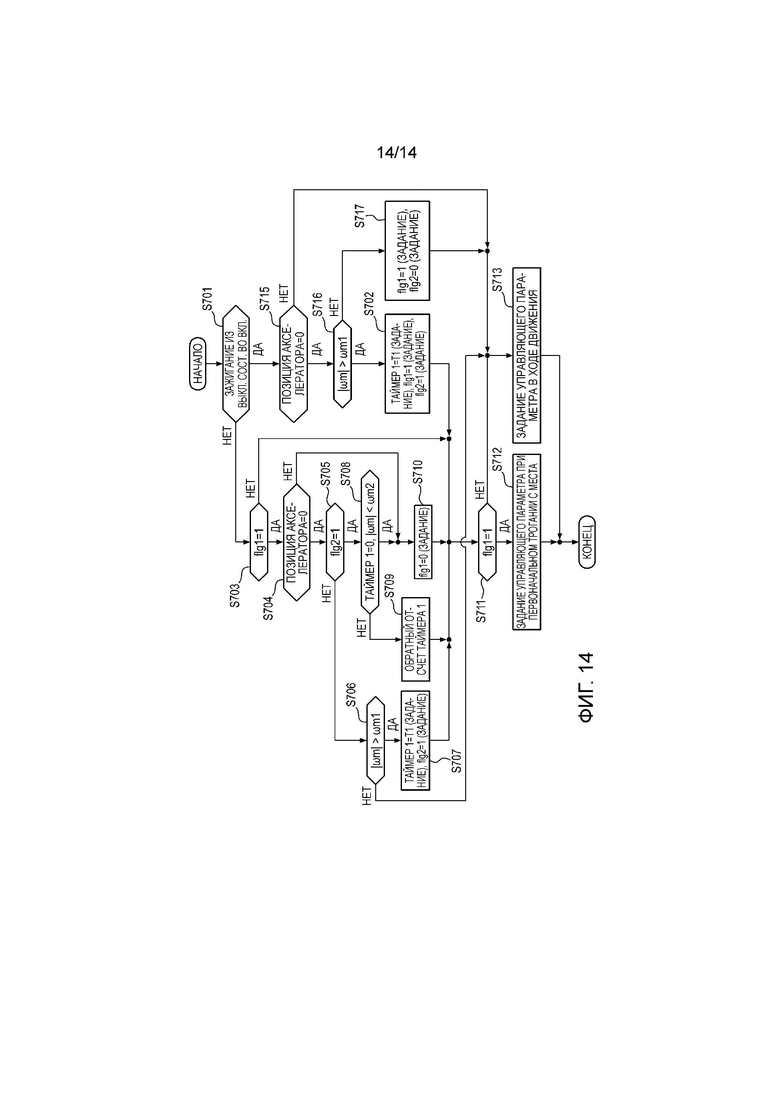
Группа изобретений относится к устройству для управления тяговой системой транспортных средств с электротягой. Устройство управления для электромотора электрического транспортного средства содержит средство определения запуска, средство оценки возмущающего крутящего момента, средство управления крутящим моментом и средство управления скоростью отклика. Средство управления скоростью отклика выполнено с возможностью управлять скоростью отклика крутящего момента приведения в движение на возмущения, действующие на транспортное средство. При этом, когда операция первоначального запуска определяется как выполняемая, средство управления скоростью отклика увеличивает скорость отклика крутящего момента приведения в движение электромотора по сравнению со скоростью отклика непосредственно перед остановкой транспортного средства. Также заявлен способ управления для электромотора электрического транспортного средства. Технический результат заключается в снижении возможности отката транспортного средства при начале движения на дороге с уклоном. 2 н. и 10 з.п. ф-лы, 14 ил.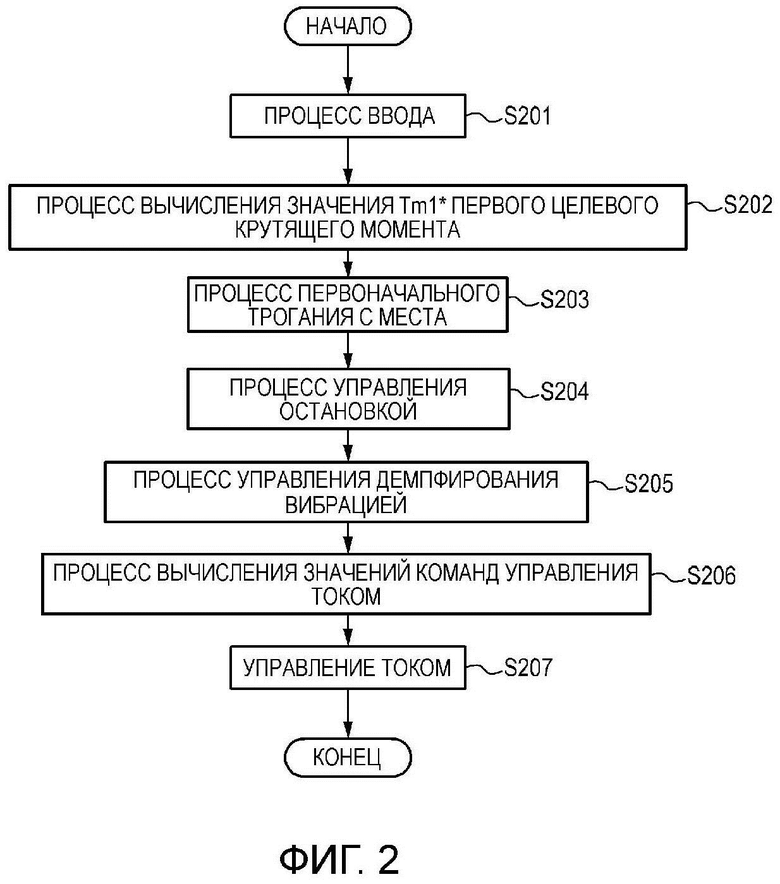
1. Устройство управления для электромотора электрического транспортного средства, причем электрическое транспортное средство включает в себя электромотор, который формирует крутящий момент приведения в движение и рекуперативный крутящий момент, причем устройство управления для электромотора электрического транспортного средства содержит:
- средство определения запуска, выполненное с возможностью определять то, выполнена или нет операция первоначального запуска транспортного средства водителем, причем операция первоначального запуска не выполняется вместе с операцией акселератора;
- средство оценки возмущающего крутящего момента, выполненное с возможностью вычислять оцененное значение возмущающего крутящего момента, необходимое для поддержания состояния остановки транспортного средства, соответствующего возмущениям, действующим на транспортное средство;
- средство управления крутящим моментом, выполненное с возможностью осуществлять управление таким образом, что крутящий момент приведения в движение электромотора сходится к оцененному значению возмущающего крутящего момента, когда транспортное средство определяется как находящееся в момент времени непосредственно перед остановкой транспортного средства в ходе движения, или определяется как находящееся в ходе операции первоначального запуска; и
- средство управления скоростью отклика, выполненное с возможностью управлять скоростью отклика крутящего момента приведения в движение на возмущения, действующие на транспортное средство, при этом
- средство управления скоростью отклика увеличивает, когда операция первоначального запуска определяется как выполняемая, скорость отклика крутящего момента приведения в движение электромотора по сравнению со скоростью отклика крутящего момента приведения в движение непосредственно перед остановкой транспортного средства.
2. Устройство управления для электромотора электрического транспортного средства по п. 1, в котором
- средство определения запуска определяет то, что операция первоначального запуска выполнена, когда средство определения запуска определяет переход сигнала переключателя зажигания транспортного средства из выключенного состояния во включенное состояние.
3. Устройство управления для электромотора электрического транспортного средства по п. 2, дополнительно содержащее:
- средство определения позиции акселератора, выполненное с возможностью определять позицию акселератора водителем; и
- средство определения параметров скорости/частоты вращения, выполненное с возможностью определять частоту вращения электромотора или параметр скорости/частоты вращения, пропорциональный частоте вращения электромотора, при этом
- средство определения запуска определяет то, что операция первоначального запуска выполнена, когда средство определения запуска определяет переход сигнала переключателя зажигания транспортного средства из выключенного состояния во включенное состояние, рабочая величина нажатия педали акселератора является нулевой, и абсолютное значение частоты вращения электромотора или абсолютное значение параметра скорости/частоты вращения, в общем, равно или превышает предварительно определенное значение.
4. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, дополнительно содержащее:
- средство определения параметров скорости/частоты вращения, выполненное с возможностью определять частоту вращения электромотора или параметр скорости/частоты вращения, пропорциональный частоте вращения электромотора, при этом:
- средство оценки возмущающего крутящего момента использует систему управления с обратной связью по скорости/частоте вращения, которая выполняет обратную связь для определенной частоты вращения электромотора или параметра скорости/частоты вращения таким образом, чтобы вычислять оцененное значение возмущающего крутящего момента, и
- средство управления скоростью отклика увеличивает усиление обратной связи системы управления с обратной связью по скорости/частоте вращения, когда операция первоначального запуска определяется как выполняемая с тем, чтобы увеличивать скорость отклика крутящего момента приведения в движение.
5. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, в котором:
- средство оценки возмущающего крутящего момента включает в себя фильтр, имеющий предварительно определенный коэффициент сглаживания, состоящий из квадратичного выражения в качестве числителя и квадратичного выражения в качестве знаменателя, и вычисляет оцененное значение возмущающего крутящего момента, сглаженное на основе коэффициента сглаживания фильтра, и
- средство управления скоростью отклика уменьшает коэффициент сглаживания знаменателя фильтра, когда операция первоначального запуска определяется как выполняемая с тем, чтобы увеличивать скорость отклика крутящего момента приведения в движение.
6. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, в котором:
- средство оценки возмущающего крутящего момента включает в себя фильтр нижних частот, имеющий предварительно определенную постоянную времени, и вычисляет оцененное значение возмущающего крутящего момента на основе постоянной времени фильтра нижних частот, и
- средство управления скоростью отклика уменьшает постоянную времени, когда операция первоначального запуска определяется как выполняемая с тем, чтобы увеличивать скорость отклика крутящего момента приведения в движение.
7. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, дополнительно содержащее:
- средство определения параметров скорости/частоты вращения, выполненное с возможностью определять частоту вращения электромотора или параметр скорости/частоты вращения, пропорциональный частоте вращения электромотора, при этом
- средство оценки возмущающего крутящего момента использует систему управления с обратной связью по скорости/частоте вращения, которая выполняет обратную связь для значений, при которых скользящее среднее на основе предварительно определенного счетчика дискретизаций применяется к определенной частоте вращения электромотора или параметру скорости/частоты вращения с тем, чтобы вычислять оцененное значение возмущающего крутящего момента, и средство оценки возмущающего крутящего момента уменьшает предварительно определенный счетчик дискретизаций, когда операция первоначального запуска определяется как выполняемая.
8. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, дополнительно содержащее:
- средство управления демпфированием вибрации, выполненное с возможностью заставлять электромотор формировать крутящий момент демпфирования вибрации для уменьшения вибрации, сформированной на кузове транспортного средства, при этом
- средство управления демпфированием вибрации использует систему управления с обратной связью для того, чтобы вычислять крутящий момент демпфирования вибрации, и задает усиление обратной связи системы управления с обратной связью меньшим усиления обратной связи непосредственно перед остановкой транспортного средства, когда операция первоначального запуска определяется как выполняемая.
9. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, дополнительно содержащее:
- средство определения параметров скорости/частоты вращения, выполненное с возможностью определять частоту вращения электромотора или параметр скорости/частоты вращения, пропорциональный частоте вращения электромотора, при этом
- средство определения запуска определяет то, что операция первоначального запуска выполнена, когда абсолютное значение определенного значения частоты вращения электромотора или параметра скорости/частоты вращения увеличивается до значения, равного или большего предварительно определенному первому значению определения отката, и затем уменьшается до значения, равного или меньшего предварительно определенному второму значению определения отката, и средство управления скоростью отклика уменьшает увеличенную скорость отклика крутящего момента приведения в движение до эквивалента скорости отклика крутящего момента приведения в движение непосредственно перед остановкой транспортного средства, когда операция первоначального запуска определяется как выполняемая.
10. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, в котором
- средство управления скоростью отклика уменьшает скорость отклика крутящего момента приведения в движение до эквивалента скорости отклика крутящего момента приведения в движение непосредственно перед остановкой транспортного средства после истечения предварительно определенного периода времени с момента, когда операция первоначального запуска определяется как выполняемая.
11. Устройство управления для электромотора электрического транспортного средства по любому из пп. 1-3, дополнительно содержащее:
- средство определения уклона, выполненное с возможностью определять уклон поверхности дороги, на которой останавливается транспортное средство, при этом
- средство управления скоростью отклика увеличивает скорость отклика крутящего момента приведения в движение по мере того, как уклон становится большим.
12. Способ управления для электромотора электрического транспортного средства, причем электрическое транспортное средство включает в себя электромотор, который формирует крутящий момент приведения в движение и рекуперативный крутящий момент, при этом способ управления для электромотора электрического транспортного средства содержит этапы, на которых:
- определяют то, выполнена или нет операция первоначального запуска транспортного средства водителем, причем операция первоначального запуска не выполняется вместе с операцией акселератора;
- вычисляют оцененное значение возмущающего крутящего момента, необходимое для поддержания состояния остановки транспортного средства, соответствующего возмущениям, действующим на транспортное средство;
- осуществляют управление таким образом, что крутящий момент приведения в движение электромотора сходится к оцененному значению возмущающего крутящего момента, когда транспортное средство определяется как находящееся в момент времени непосредственно перед остановкой транспортного средства в ходе движения, или определяется как находящееся в ходе операции первоначального запуска; и
- увеличивают скорость отклика крутящего момента приведения в движение электромотора по сравнению со скоростью отклика крутящего момента приведения в движение непосредственно перед остановкой транспортного средства, когда операция первоначального запуска определяется как выполняемая.
| JP 2012153175 A, 16.08.2012 | |||
| JP 2014187779 A, 02.10.2014 | |||
| JP 2014075869 A, 24.04.2014 | |||
| JP 2000320366 A, 21.11.2000 | |||
| JP 2015043669 A, 05.03.2015 | |||
| JP 2011229326 A, 10.11.2011 | |||
| JP H05168108 A, 02.07.1993 | |||
| JP 2005269833 A, 29.09.2005 | |||
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |

