Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления для транспортного средства с электроприводом и к устройству управления для транспортного средства с электроприводом.
Уровень техники
[0002] Традиционно, в системе управления ускорением/замедлением для транспортного средства, известна технология, в которой замедление управляется в соответствии с величиной приведения в действие педали акселератора, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и ускорение управляется в соответствии с величиной приведения в действие педали акселератора, когда величина приведения в действие педали акселератора составляет предварительно определенное значение или выше (см. JP 2000-205015). В системе управления ускорением/замедлением, целевое ускорение/замедление может задаваться в соответствии с абсолютной величиной градиента поверхности дороги, соответствующего величине приведения в действие педали акселератора, таким образом, чтобы исключать влияние градиента поверхности дороги, и в силу этого даже на дороге с градиентом, величина приведения в действие педали акселератора, при которой целевое ускорение/замедление задается равным нулю, позволяет поддерживать равномерную скорость транспортного средства без необходимости регулирования величины приведения в действие педали акселератора.
Сущность изобретения
[0003] Здесь, в технологии, раскрытой в патентном документе 1, чтобы сдерживать ускорение/замедление и изменение скорости, вызываемое вследствие изменения градиента поверхности дороги, по которой движется транспортное средство, целевое ускорение/замедление корректируется таким образом, чтобы исключать влияние градиента поверхности дороги в соответствии с абсолютной величиной градиента поверхности дороги. Соответственно, из опыта, водитель считает, что замедление, вызываемое в транспортном средстве при градиенте спуска, меньше замедления для ровной дороги, но целевое ускорение/замедление корректируется таким образом, чтобы исключать влияние градиента спуска, так что замедление вызывается аналогично ровной дороге, в силу этого приводя к тому, что водитель может иметь некомфортное ощущение.
[0004] Настоящее изобретение имеет намерение предоставлять технологию, чтобы уменьшать величину коррекции градиента при градиенте спуска (нисходящая дорога) таким образом, чтобы сдерживать возникновение у водителя некомфортного ощущения.
[0005] Способ управления для транспортного средства с электроприводом этого изобретения включает в себя мотор, выполненный с возможностью подавать в транспортное средство тормозную силу или движущую силу, соответствующую величине приведения в действие педали акселератора. Способ управления служит для управления тормозной силой, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и управления движущей силой, когда величина приведения в действие педали акселератора составляет предварительно определенное значение или больше. В способе управления, вычисляется целевое значение крутящего момента, с которым мотору инструктируется выводить тормозной/движущий крутящий момент, соответствующий величине приведения в действие педали акселератора, оценивается возмущающий крутящий момент, действующий на мотор, в качестве сопротивления, соответствующего градиенту поверхности дороги, выполняется коррекция для того, чтобы удалять возмущающий крутящий момент из целевого значения крутящего момента, и мотор управляется в соответствии с целевым значением крутящего момента, подвергнутым коррекции. Величина коррекции при коррекции уменьшается на нисходящей дороге, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и скорость транспортного средства превышает предварительно определенную скорость транспортного средства.
Краткое описание чертежей
[0006] Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электрического транспортного средства, включающего в себя устройство управления для транспортного средства с электроприводом в одном варианте осуществления.
Фиг. 2 является процедурой процесса управления током мотора, выполняемого посредством контроллера мотора, включенного в устройство управления для транспортного средства с электроприводом в одном варианте осуществления.
Фиг. 3 является видом, иллюстрирующим один пример таблицы позиций акселератора и крутящих моментов.
Фиг. 4 является видом для того, чтобы описывать способ для вычисления первого целевого значения крутящего момента в одном варианте осуществления.
Фиг. 5 является видом, описывающим способ для вычисления оцененного значения возмущающего крутящего момента.
Фиг. 6 является моделированным видом системы трансмиссии для передачи движущей силы транспортного средства.
Фиг. 7 является видом для того, чтобы описывать процесс управления остановкой.
Фиг. 8 является видом для того, чтобы описывать способ для вычисления крутящего F/B-момента Tω по скорости вращения мотора на основе скорости вращения мотора.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процедуру процесса управления замедлением.
Фиг. 10 является видом, иллюстрирующим один пример коэффициента уменьшения величины коррекции градиента относительно скорости транспортного средства в форме абсолютного значения в одном варианте осуществления.
Фиг. 11 является видом, иллюстрирующим один пример коэффициента уменьшения величины коррекции градиента относительно скорости транспортного средства в форме абсолютного значения в одном варианте осуществления.
Фиг. 12 является видом, иллюстрирующим один пример результата управления посредством устройства управления для транспортного средства с электроприводом в одном варианте осуществления.
Подробное описание вариантов осуществления
[0007] Далее описывается пример, в котором устройство управления для транспортного средства с электроприводом согласно настоящему изобретению применяется к электрическому транспортному средству с использованием электромотора (в дальнейшем называемого "электрическим мотором" или просто "мотором") в качестве источника приведения в движение.
[0008] Один вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей основную конфигурацию электрического транспортного средства, включающего в себя устройство управления для транспортного средства с электроприводом в одном варианте осуществления. Устройство управления для транспортного средства с электроприводом согласно настоящему изобретению включает в себя электрический мотор 4 в качестве части или всего источника приведения в движение для транспортного средства и является применимым к транспортному средству с электроприводом, которое может двигаться посредством движущей силы электрического мотора. Транспортное средство с электроприводом включает в себя не только электрическое транспортное средство, но также и гибридное транспортное средство и транспортное средство на топливных элементах. В частности, устройство управления для транспортного средства с электроприводом в настоящем варианте осуществления может применяться к транспортному средству, которое может управлять ускорением и замедлением или остановкой транспортного средства только посредством операции нажатия педали акселератора. Во время ускорения водитель в транспортном средстве нажимает педаль акселератора, а во время замедления или остановки водитель уменьшает величину нажатия педали акселератора, нажатой водителем, или уменьшает величину нажатия педали акселератора до нуля. Следует отметить, что на восходящей дороге, чтобы предотвращать обратное движение транспортного средства, транспортное средство может приближаться к состоянию остановки, в то время как водитель нажимает педаль акселератора, в некоторых случаях.
[0009] Сигналы, указывающие состояние транспортного средства, такие как скорость V транспортного средства, позиция θ акселератора (степень открытия акселератора), фаза α ротора мотора (трехфазный переменный мотор) 4 и трехфазные переменные токи iu, iv, iw мотора 4, вводятся в контроллер 2 мотора в качестве цифровых сигналов. Контроллер 2 мотора формирует PWM-сигнал для управления мотором 4 на основе входных сигналов. Дополнительно, контроллер 2 мотора управляет переключающим элементом инвертора 3 таким образом, чтобы открывать и закрывать в ответ на PWM-сигнал, сформированный таким способом. Контроллер 2 мотора дополнительно формирует значение команды управления величиной фрикционного торможения в соответствии с величиной приведения в действие педали акселератора водителем или величиной приведения в действие педали тормоза 10.
[0010] Инвертор 3 включает/отключает два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT или MOSFET), предоставляемые для каждой фазы, с тем чтобы преобразовывать постоянный ток, подаваемый из аккумулятора 1, в переменный ток, и вводит требуемый ток в мотор 4.
[0011] Мотор 4 формирует движущую силу посредством переменного тока, подаваемого из инвертора 3, и передает движущую силу на правое и левое ведущие колеса 9a, 9b через редуктор 5 и ведущий вал 8. Дополнительно, когда мотор 4 вращается согласно ведущим колесам 9a, 9b в то время, когда транспортное средство движется, мотор 4 формирует рекуперативную движущую силу таким образом, чтобы восстанавливать кинетическую энергию транспортного средства в качестве электрической энергии. В этом случае, инвертор 3 преобразует, в постоянный ток, переменный ток, сформированный во время работы в рекуперативном режиме мотора 4, и подает его в аккумулятор 1.
[0012] Датчик 7 тока определяет трехфазные переменные токи Iu, Iv, Iw, протекающие в мотор 4. Следует отметить, что поскольку сумма трехфазных переменных токов Iu, Iv, Iw равна нулю, токи данных двух фаз могут определяться, и ток оставшейся одной фазы может находиться посредством вычисления.
[0013] Датчик 6 вращения, например, представляет собой круговой датчик позиции или датчик позиции и определяет фазу α ротора мотора 4.
[0014] Тормозной контроллер 11 выводит, во фрикционный тормоз 13, значение команды управления тормозным актуатором для формирования тормозного гидравлического давления, соответствующего значению команды управления величиной фрикционного торможения, сформированному посредством контроллера 2 мотора.
[0015] Гидравлический датчик 12 определяет тормозное гидравлическое давление фрикционного тормоза 13 и выводит определенное тормозное гидравлическое давление в тормозной контроллер 11 и контроллер 2 мотора.
[0016] Фрикционный тормоз 13 предоставляется для каждого из правого и левого ведущих колес 9a, 9b и формирует тормозную силу в транспортном средстве посредством прижатия тормозной колодки к тормозному ротору в соответствии с тормозным гидравлическим давлением.
[0017] Следует отметить, что в случае, если максимальный рекуперативный тормозной крутящий момент является недостаточным относительно тормозного крутящего момента, намеченного водителем и вычисленного из величины приведения в действие педали акселератора, скорости транспортного средства и т.д., фрикционная тормозная сила, сформированная посредством фрикционного тормоза 13, функционирует в качестве тормозной силы, используемой в ответ на значение команды управления величиной фрикционного торможения, выводимое из контроллера 2 мотора. Дополнительно, фрикционная тормозная сила также используется в случае, если тормозная сила, намеченная водителем, меньше максимального рекуперативного тормозного крутящего момента, или в случае, если рекуперативная мощность ограничивается вследствие полного заряда аккумулятора 1, защиты от нагрева мотора 4 и т.п., и требуемая тормозная сила для водителя не может охватываться только посредством рекуперативного тормозного крутящего момента. Дополнительно, фрикционная тормозная сила используется не только в случае, если фрикционная тормозная сила запрашивается в соответствии с величиной приведения в действие педали акселератора, но также и в случае, если требуемая тормозная сила должна достигаться посредством величины приведения в действие педали тормоза водителем.
[0018] Датчик 15 продольной составляющей G главным образом определяет продольное ускорение и выводит значение определения в контроллер 2 мотора. В силу этого, контроллер 2 мотора может вычислять компонент возмущающего крутящего момента, в общем, совпадающий с сопротивлением вследствие градиента, действующим на мотор 4, на основе значения определения датчика продольной составляющей G.
[0019] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру процесса управления током мотора, программируемого с возможностью выполняться посредством контроллера 2 мотора.
[0020] На этапе S201, сигналы, указывающие состояние транспортного средства, вводятся в контроллер 2 мотора. В данном документе, вводятся скорость V транспортного средства (м/с), позиция θ акселератора (%), фаза α ротора (рад) мотора 4, скорость Nm вращения (об/мин) мотора 4, трехфазные переменные токи iu, iv, iw, протекающие в мотор 4, значение Vdc постоянного напряжения (В) между аккумулятором 1 и инвертором 3, величина приложения тормоза и тормозное гидравлическое давление.
[0021] Скорость V транспортного средства (км/ч), например, представляет собой скорость вращения колес для узлов колеса с шиной (ведущих колес 9a, 9b), выполненных с возможностью передавать движущую силу во время приведения в движение транспортного средства. Скорость V транспортного средства получается из датчиков 11a, 11b скорости вращения колес или других контроллеров (не показаны) через связь. Альтернативно, скорость V транспортного средства (км/ч) находится таким образом, что скорость ωm вращения мотора умножается на динамический радиус r шины, и результирующее значение делится на передаточное отношение главной шестерни, чтобы находить скорость v транспортного средства (м/с), и скорость v транспортного средства (м/с) умножается на 3600/1000 для преобразования единиц измерения.
[0022] Позиция θ акселератора (%) получается, в качестве индекса, указывающего величину приведения в действие педали акселератора водителем, из датчика позиции акселератора (не показан), либо получается из других контроллеров (не показаны), таких как контроллер транспортного средства, через связь.
[0023] Фаза α ротора (рад) мотора 4 получается из датчика 6 вращения. Скорость Nm вращения (об/мин) мотора 4 находится таким образом, что угловая скорость ωm вращения (электрический угол) делится на число полюсных пар p мотора 4, чтобы находить скорость ωm вращения мотора (рад/с), которая представляет собой механическую угловую скорость мотора 4, и скорость ωm вращения мотора, найденная таким способом, умножается на 60/(2π). Угловая скорость ω вращения находится посредством дифференцирования фазы α ротора.
[0024] Трехфазные переменные токи iu, iv, iw (A), протекающие в мотор 4, получаются из датчика 7 тока.
[0025] Значение Vdc постоянного напряжения (В) находится из значения напряжения источника мощности, отправленного из датчика напряжения (не показан), предоставленного в линии источника мощности постоянного тока между аккумулятором 1 и инвертором 3, или из контроллера аккумулятора (не показан).
[0026] Величина приложения тормоза получается из значения тормозного гидравлического датчика, определенного посредством гидравлического датчика 12. Альтернативно, значение определения (величина приведения в действие педали тормоза), определенное посредством датчика хода (не показан) и т.п., выполненного с возможностью определять величину нажатия педали тормоза посредством операции с педалью водителя, может использоваться в качестве величины приложения тормоза.
[0027] В процессе вычисления целевых значений крутящего момента этапа S202, контроллер 2 мотора задает первое целевое значение Tm1* крутящего момента. Более конкретно, сначала базовое целевое значение Tm0* крутящего момента (целевое значение крутящего момента) в качестве запрашиваемого водителем крутящего момента задается посредством обращения к таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3, которая иллюстрирует один аспект характеристики движущей силы, вычисленной в соответствии с позицией θ акселератора и скоростью ωm вращения мотора, вводимыми на этапе S201. После этого, находится оцененное значение Td возмущающего крутящего момента, в общем, совпадающее с сопротивлением вследствие градиента. После этого, посредством суммирования оцененного значения Td возмущающего крутящего момента в качестве крутящего момента коррекции градиента с базовым целевым значением Tm0* крутящего момента, может задаваться первое целевое значение Tm1* крутящего момента, при котором подавляется компонент сопротивления вследствие градиента.
[0028] Следует отметить, что в настоящем варианте осуществления, в то время, когда замедление запрашивается от водителя, выполняется процесс уменьшения величины коррекции градиента для уменьшения абсолютной величины крутящего момента коррекции градиента (величины коррекции градиента), который должен суммироваться с базовым целевым значением Tm0* крутящего момента, в соответствии со скоростью транспортного средства. Ниже описываются подробности процесса уменьшения величины коррекции градиента в качестве характеристики управления в настоящем изобретении.
[0029] Следует отметить, что, как описано выше, устройство управления для транспортного средства с электроприводом в настоящем варианте осуществления является применимым к транспортному средству, которое может управлять ускорением и замедлением или остановкой транспортного средства только посредством операции нажатия педали акселератора, и транспортное средство может останавливаться посредством, по меньшей мере, полного закрытия педали акселератора. С учетом этого, в таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3, когда позиция акселератора составляет от 0 (полностью закрытая) до 1/8, отрицательный крутящий момент мотора задается таким образом, что рекуперативная тормозная сила работает. Следует отметить, что таблица позиций акселератора и крутящих моментов, проиллюстрированная на фиг. 3, представляет собой один пример и не ограничена этим.
[0030] На этапе S203, контроллер 2 выполняет процесс управления остановкой. Более конкретно, контроллер 2 определяет то, находится или нет транспортное средство в момент времени непосредственно перед остановкой. Когда транспортное средство не находится в момент времени непосредственно перед остановкой, контроллер 2 задает первое целевое значение Tm1* крутящего момента, вычисленное на этапе S202, равным значению Tm* команды управления крутящим моментом мотора, и когда транспортное средство находится в момент времени непосредственно перед остановкой, контроллер 2 задает второе целевое значение Tm2* крутящего момента равным значению Tm* команды управления крутящим моментом мотора. Второе целевое значение Tm2* крутящего момента сходится к оцененному значению Td возмущающего крутящего момента наряду с уменьшением скорости вращения мотора. Второе целевое значение Tm2* крутящего момента составляет положительный крутящий момент на восходящей дороге, отрицательный крутящий момент на нисходящей дороге, и, в общем, нуль на ровной дороге.
[0031] Дополнительно, во время процесса управления остановкой, в котором второе целевое значение Tm2* крутящего момента задается равным значению Tm* команды управления крутящим моментом мотора, процесс уменьшения величины коррекции градиента (описан ниже) не выполняется. Таким образом, во время процесса управления остановкой, значение Tm* команды управления крутящим моментом мотора сходится к оцененному значению Td возмущающего крутящего момента, в общем, совпадающему с сопротивлением вследствие градиента, и в силу этого независимо от градиента поверхности дороги, транспортное средство может плавно останавливаться только посредством операции нажатия педали акселератора, и состояние остановки может поддерживаться.
[0032] Затем, на этапе S204, контроллер 2 выполняет процесс вычисления значения команды управления током. Более конкретно, целевое значение id* тока d-оси и целевое значение iq* тока q-оси находятся на основе скорости ωm вращения мотора и значения Vdc постоянного напряжения в дополнение к значению Tm* команды управления крутящим моментом мотора, вычисленному на этапе S203. Например, таблица, которая задает взаимосвязь значения команды управления крутящим моментом, скорости вращения мотора и значения постоянного напряжения с целевым значением тока d-оси и целевым значением тока q-оси, подготавливается заранее, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси находятся путем обращения к таблице.
[0033] На этапе S205, управление по току выполняется таким образом, что ток id d-оси и ток iq q-оси совпадают с целевым значением id* тока d-оси и целевым значением iq* тока q-оси, найденными на этапе S204, соответственно. Для этой цели, сначала, ток id d-оси и ток iq q-оси находятся на основе трехфазных переменных токов iu, iv, iw и фазы α ротора мотора 4, вводимых на этапе S201. Затем, значения vd, vq команд управления напряжением d-оси и q-оси вычисляются из отклонений между целевыми значениями id*, iq* тока d-оси и q-оси и токами id, iq d-оси и q-оси. Следует отметить, что напряжение помехозащищенности, необходимое для того, чтобы компенсировать напряжение помех между ортогональными осями координат d-q, может суммироваться со значениями vd, vq команд управления напряжением d-оси и q-оси.
[0034] Затем, значения vu, vv, vw команд управления трехфазным переменным напряжением находятся из значений vd, vq команд управления напряжением d-оси и q-оси и фазы α ротора мотора 4. PWM-сигналы tu (%), tv (%), tw (%) находятся из таких найденных значений vu, vv, vw команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения. Посредством открытия и закрытия переключающего элемента инвертора 3 в ответ на PWM-сигналы tu, tv, tw, найденные таким способом, мотор 4 может приводиться в действие посредством требуемого крутящего момента, инструктированного посредством значения Tm* команды управления крутящим моментом мотора.
[0035] В дальнейшем описываются подробности процесса, выполняемого на этапе S202 на фиг. 2, т.е. способа для задания первого целевого значения Tm1* крутящего момента, со ссылкой на фиг. 4.
[0036] Модуль 401 задания базовых целевых значений крутящего момента задает базовое целевое значение Tm0* крутящего момента посредством обращения к таблице позиций акселератора и крутящих моментов, проиллюстрированной на фиг. 3, на основе позиции акселератора и скорости ωm вращения мотора.
[0037] Модуль 402 оценки возмущающего крутящего момента находит оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом мотора, скорости ωm вращения мотора и величины B применения тормоза.
[0038] Фиг. 5 является блок-схемой, иллюстрирующей подробную конфигурацию модуля 402 оценки возмущающего крутящего момента. Модуль 402 оценки возмущающего крутящего момента включает в себя блок 501 управления, блок 502 управления, модуль 503 оценки тормозного крутящего момента, сумматор/вычитатель 504 и блок 505 управления.
[0039] Блок 501 управления функционирует в качестве фильтра, имеющего передаточную характеристику, указываемую посредством H(s)/Gp(s), и вычисляет оцененное значение первого крутящего момента мотора посредством приема скорости ωm вращения мотора и выполнения фильтрации. Gp(s) представляет собой передаточную характеристику из крутящего момента Tm мотора в скорость ωm вращения мотора, и ниже описываются подробности Gp(s). H(s) представляет собой фильтр нижних частот, имеющий такую передаточную характеристику, что разность между степенью знаменателя и степенью числителя не меньше разности между степенью знаменателя и степенью числителя передаточной характеристики Gp(s).
[0040] Блок 502 управления функционирует в качестве фильтра нижних частот, имеющего передаточную характеристику, указываемую посредством H(s), и вычисляет оцененное значение второго крутящего момента мотора посредством приема значения Tm* команды управления крутящим моментом мотора и выполнения фильтрации.
[0041] Модуль 503 оценки тормозного крутящего момента вычисляет оцененное значение тормозного крутящего момента на основе величины B приложения тормоза и скорости V транспортного средства. В модуле 503 оценки тормозного крутящего момента, оцененное значение тормозного крутящего момента вычисляется с учетом процесса умножения, чтобы выполнять преобразование крутящего момента вала мотора из величины B приложения тормоза, скорости отклика из значения гидравлического датчика, определенного посредством гидравлического датчика 12, в фактическую тормозную силу и т.д.
[0042] Следует отметить, что тормозная сила, вызываемая посредством фрикционного тормоза 13, работает в направлении замедления как во время движения вперед транспортного средства, так и во время обратного движения, и в силу этого необходимо инвертировать знак оцененного значения тормозного крутящего момента в соответствии со знаком продольной скорости транспортного средства (параметра скорости, пропорционального скорости транспортного средства, например, скорости кузова транспортного средства, скорости вращения колес, скорости вращения мотора, скорости вращения ведущего вала и т.п.). Соответственно, когда транспортное средство движется вперед, модуль 503 оценки тормозного крутящего момента задает знак оцененного значения тормозного крутящего момента как отрицательный в соответствии с входной скоростью V транспортного средства, и когда транспортное средство движется назад, модуль 503 оценки тормозного крутящего момента задает знак оцененного значения тормозного крутящего момента как положительный в соответствии с входной скоростью V транспортного средства.
[0043] Сумматор/вычитатель 504 вычитает оцененное значение первого крутящего момента мотора из оцененного значения второго крутящего момента мотора и суммирует оцененное значение тормозного крутящего момента. В сумматоре/вычитателе 504, когда оцененное значение тормозного крутящего момента, имеющее знак минус, суммируется в направлении движения транспортного средства, оцененное значение Td возмущающего крутящего момента, при котором подавляется тормозной крутящий момент, вызываемый вследствие величины B приложения тормоза, может вычисляться на последующей стадии. Вычисленное значение выводится в блок 505 управления.
[0044] Блок 505 управления представляет собой фильтр, имеющий передаточную характеристику, указываемую посредством Hz(s), и блок 505 управления вычисляет оцененное значение Td возмущающего крутящего момента посредством выполнения фильтрации для вывода из сумматора/вычитателя 504 и выводит его в модуль 403 регулирования величины коррекции градиента, проиллюстрированный на фиг. 4. Ниже описываются подробности Hz(s).
[0045] Теперь ссылаясь на фиг. 4, далее продолжается описание. Оцененное значение Td возмущающего крутящего момента, вычисленное в модуле 402 оценки возмущающего крутящего момента, традиционно вводится в сумматор 404 таким образом, что оно суммируется с базовым целевым значением Tm0* крутящего момента. В силу этого, коррекция градиента на основе оцененного значения Td возмущающего крутящего момента выполняется для базового целевого значения Tm0* крутящего момента таким образом, что оцененное значение Td возмущающего крутящего момента в качестве крутящего момента коррекции градиента, соответствующего компоненту сопротивления вследствие градиента, суммируется с базовым целевым значением Tm0* крутящего момента, и в силу этого, первое целевое значение Tm1* крутящего момента, при котором подавляется компонент сопротивления вследствие градиента, вычисляется.
[0046] Тем не менее, когда влияние компонента сопротивления вследствие градиента на ускорение и замедление полностью устраняется посредством такой коррекции градиента, водитель может иметь некомфортное ощущение, поскольку водитель не может ощущать ожидаемое влияние градиента на ускорение и замедление. Например, в случае если позиция акселератора меньше предварительно определенного значения во время движения на нисходящей дороге (при градиенте спуска), когда замедление (тормозная сила) корректируется инкрементно посредством коррекции градиента, большое замедление может формироваться в транспортном средстве, несмотря на градиент спуска. В это время, водитель, движущийся на нисходящей дороге, на уровне ощущений ожидает, что транспортное средство имеет тенденцию ускоряться вследствие градиента, а замедление уменьшается, и в силу этого водитель имеет некомфортное ощущение при замедлении, которое увеличивается в противовес ожиданию. Дополнительно, поскольку замедление, скорректированное инкрементно, становится относительно большим по мере того, как скорость транспортного средства является более высокой, некомфортное ощущение у водителя легко становится большим по мере того, как скорость транспортного средства является более высокой.
[0047] В настоящем варианте осуществления, с точки зрения ощущения при вождении, чтобы сдерживать некомфортное ощущение, которое может формироваться в то время, когда замедление запрашивается от водителя на нисходящей дороге, выполняется процесс уменьшения величины коррекции градиента для уменьшения абсолютной величины (величины коррекции градиента) крутящего момента коррекции градиента в соответствии со скоростью транспортного средства. Далее описывается конфигурация для того, чтобы выполнять процесс уменьшения величины коррекции градиента.
[0048] Модуль 403 регулирования величины коррекции градиента, проиллюстрированный на фиг. 4, выполнен с возможностью выполнять процесс уменьшения величины коррекции градиента, и модуль 403 регулирования величины коррекции градиента вычисляет крутящий момент коррекции градиента, подвергнутый процессу уменьшения величины коррекции градиента посредством приема скорости транспортного средства и оцененного значения Td возмущающего крутящего момента, оцененного в модуле 402 оценки возмущающего крутящего момента. Более конкретно, модуль 403 регулирования величины коррекции градиента сначала вычисляет коэффициент уменьшения величины коррекции градиента, который функционально оптимизирован с точки зрения ощущения при вождении, из градиента поверхности дороги, который является определяемым из оцененного значения Td возмущающего крутящего момента, и скорости вращения мотора в качестве параметра скорости, указывающего скорость транспортного средства. Затем крутящий момент коррекции градиента вычисляется посредством умножения входного оцененного значения Td возмущающего крутящего момента на вычисленный коэффициент уменьшения величины коррекции градиента. В силу этого, крутящий момент коррекции градиента, отрегулированный до величины коррекции градиента, которая не выдает водителю некомфортное ощущение, вычисляется. Следует отметить, что скорость вращения мотора, используемая в качестве индекса, на основе которого определяется скорость транспортного средства, представляет собой один пример, и параметр скорости, пропорциональный скорости транспортного средства, например, скорость вращения колес, скорость вращения ведущего вала и т.п., также является применимым и выбирается надлежащим образом. Ниже описываются подробности способа задания коэффициента уменьшения величины коррекции градиента, используемого для вычисления крутящего момента коррекции градиента.
[0049] Сумматор 404 суммирует базовое целевое значение Tm0* крутящего момента в качестве запрашиваемого водителем крутящего момента, вычисленного в модуле 401 задания базовых целевых значений крутящего момента, с крутящим моментом коррекции градиента, вычисленным посредством модуля 403 регулирования величины коррекции градиента, таким образом, чтобы вычислять первое целевое значение Tm1* крутящего момента.
[0050] Посредством использования первого целевого значения Tm1* крутящего момента, вычисляемого таким способом, можно уменьшать величину приведения в действие педали акселератора (величину хода) водителя посредством величины коррекции градиента, которая не вызывает некомфортное ощущение, в частности, на нисходящей дороге, в силу этого позволяя улучшать ощущение при вождении во время движения на дороге с градиентом.
[0051] Здесь, до описания относительно процесса уменьшения величины коррекции градиента, далее описывается передаточная характеристика Gp(s) из крутящего момента Tm мотора в скорость ωm вращения мотора в устройстве управления для транспортного средства с электроприводом настоящего варианта осуществления. Во время вычисления оцененного значения возмущающего крутящего момента, передаточная характеристика Gp(s) используется в качестве модели транспортного средства, которая моделирует систему трансмиссии для передачи движущей силы транспортного средства.
[0052] Фиг. 6 является моделированным видом системы трансмиссии для передачи движущей силы транспортного средства, и параметры на чертеже являются следующими.
Jm - инерция электрического мотора
Jw - инерция ведущего колеса
M - вес транспортного средства
Kd - жесткость скручивания приводной системы
Kt - коэффициент, связанный с трением между шиной и поверхностью дороги
N - полное передаточное отношение
r - радиус нагрузки шины
ωm - скорость вращения мотора
Tm - целевое значение Tm* крутящего момента
Td - крутящий момент ведущего колеса
F - сила, которая должна добавляться в транспортное средство
V - скорость транспортного средства
ωw - угловая скорость ведущего колеса
Из фиг. 6, могут получаться следующие уравнения движения.
[0053] Математическое выражение 1

[0054] Математическое выражение 2

[0055] Математическое выражение 3

[0056] Математическое выражение 4

[0057] Математическое выражение 5

[0058] Следует отметить, что звездочка (*), присоединяемая к правому верхнему повороту ссылки с номером в уравнениях (1)-(3), указывает производную по времени.
[0059] Когда передаточная характеристика Gp(s) из крутящего момента Tm мотора для мотора 4 в скорость ωm вращения мотора находится на основе уравнений движения, выражаемых посредством уравнений (1)-(5), уравнение (6) получается следующим образом.
[0060] Математическое выражение 6

[0061] Следует отметить, что параметры в уравнении (6) выражаются посредством уравнения (7).
[0062] Математическое выражение 7

[0063] Когда полюс и нулевая точка передаточной функции, выражаемой посредством уравнения (6), анализируются, передаточная характеристика Gp(s) может аппроксимировать передаточную функцию, выражаемую посредством уравнения (8) следующим образом, и один полюс и одна нулевая точка демонстрируют чрезвычайно близкие значения. Это эквивалентно указывает то, что α и β в уравнении (8) являются чрезвычайно близкими значениями.
[0064] Математическое выражение 8

[0065] Соответственно, посредством выполнения отмены нулей и полюсов (аппроксимации для α=β) в уравнении (8), Gp(s) составляет передаточную характеристику (второй порядок)/(третий порядок), как выражается в уравнении (9).
[0066] Математическое выражение 9

[0067] Далее, со ссылкой на фиг. 7 и 8, описываются подробности процесса управления остановкой, выполняемого на этапе S203.
[0068] Фиг. 7 является блок-схемой для того, чтобы реализовывать процесс управления остановкой. Процесс управления остановкой выполняется посредством использования модуля 701 задания крутящего F/B-момента по скорости вращения мотора, сумматора 702 и модуля 703 сравнения крутящих моментов.
[0069] Модуль 701 задания крутящего F/B-момента по скорости вращения мотора вычисляет крутящий момент Tω обратной связи по скорости вращения мотора (в дальнейшем в этом документе, называемый "крутящим F/B-моментом Tω по скорости вращения мотора") на основе определенной скорости ωm вращения мотора. В дальнейшем описываются подробности со ссылкой на фиг. 8.
[0070] Фиг. 8 является видом для того, чтобы описывать способ для вычисления крутящего F/B-момента Tω по скорости вращения мотора на основе скорости ωm вращения мотора. Модуль 701 задания крутящего F/B-момента по скорости вращения мотора включает в себя умножитель 801 и вычисляет крутящий F/B-момент Tω по скорости вращения мотора посредством умножения скорости ωm вращения мотора на усиление Kvref. Следует отметить, что Kvref является значением с отрицательным значением (со знаком "минус"), необходимым для того, чтобы останавливать транспортное средство с электроприводом непосредственно перед остановкой транспортного средства с электроприводом, и задается надлежащим образом, например, посредством экспериментальных данных и т.п. Крутящий F/B-момент Tω по скорости вращения мотора задается в качестве крутящего момента, который предоставляет большую тормозную силу по мере того, как скорость ωm вращения мотора больше.
[0071] Следует отметить, что выше описывается, что модуль 701 задания крутящего F/B-момента по скорости вращения мотора вычисляет крутящий F/B-момент Tω по скорости вращения мотора посредством умножения скорости ωm вращения мотора на усиление Kvref. Тем не менее, крутящий F/B-момент Tω по скорости вращения мотора может вычисляться посредством использования таблицы рекуперативных крутящих моментов, которая определяет рекуперативный крутящий момент относительно скорости ωm вращения мотора, таблицы коэффициентов ослабления, в которой коэффициент ослабления скорости ωm вращения мотора сохраняется заранее, и т.п.
[0072] Теперь ссылаясь на фиг. 7, далее продолжается описание. Сумматор 702 суммирует, с крутящим F/B-моментом Tω по скорости вращения мотора, вычисленным посредством модуля 701 задания крутящего F/B-момента по скорости вращения мотора, крутящий момент коррекции градиента, вычисленный в модуле 403 регулирования величины коррекции градиента посредством умножения оцененного значения Td возмущающего крутящего момента на коэффициент уменьшения величины коррекции градиента, таким образом, чтобы вычислять второе целевое значение Tm2* крутящего момента.
[0073] Здесь, с точки зрения оцененного значения Td возмущающего крутящего момента, в дальнейшем описываются подробности блока 505 управления, проиллюстрированного на фиг. 5. Блок 505 управления представляет собой фильтр, имеющий передаточную характеристику, указываемую посредством Hz(s), и блок 505 управления принимает вывод из сумматора/вычитателя 504 и выполняет фильтрацию таким образом, чтобы вычислять оцененное значение Td возмущающего крутящего момента.
[0074] Далее описывается передаточная характеристика Hz(s). Когда уравнение (9) перезаписывается, уравнение (10) предоставляется следующим образом. Следует отметить, что ζz, ωz, ζp, ωp в уравнении (10) выражаются как уравнение (11).
[0075] Математическое выражение 10

[0076] Математическое выражение 11
[0077] Сверху, Hz(s) выражается посредством уравнения (12) следующим образом. Следует отметить, что ζc>ζz устанавливается. Дополнительно, чтобы повышать эффект сдерживания вибраций в окружении при замедлении, которое вызывает люфт шестерни, например, ζc>1 устанавливается.
[0078] Математическое выражение 12

[0079] В связи с этим, как проиллюстрировано на фиг. 5, оцененное значение Td возмущающего крутящего момента в настоящем варианте осуществления оценивается из модуля наблюдения возмущений. Следует отметить, что оцененное значение Td возмущающего крутящего момента может корректироваться на основе значения определения, определенного посредством датчика 15 продольной составляющей G таким образом, чтобы дополнительно повышать точность. Дополнительно, преобразованное значение крутящего момента компонента сопротивления вследствие градиента, вычисленное на основе значения определения, определенного посредством датчика 15 продольной составляющей G, может использоваться в качестве оцененного значения Td возмущающего крутящего момента.
[0080] Здесь, в качестве возмущений, рассматриваются сопротивление воздуха, ошибка моделирования вследствие флуктуации в массе транспортного средства, вызываемой посредством числа пассажиров или допустимой нагрузки, сопротивление крену шины, сопротивление вследствие градиента поверхности дороги и т.п., но фактор возмущений, который является доминирующим, в частности, в то время, когда транспортное средство находится в момент времени непосредственно перед остановкой, представляет собой сопротивление вследствие градиента. Фактор возмущений варьируется в зависимости от рабочих условий, но поскольку модуль 402 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основе значения Tm* команды управления крутящим моментом мотора, скорости ωm вращения мотора и передаточной характеристики Gp(s), факторы возмущений, описанные выше, могут оцениваться совместно. В силу этого, при любом рабочем состоянии, можно достигать плавной остановки после замедления.
[0081] Теперь ссылаясь на фиг. 7, далее продолжается описание. Сумматор 702 суммирует крутящий F/B-момент Tω по скорости вращения мотора, вычисленный посредством модуля 701 задания крутящего F/B-момента по скорости вращения мотора, и крутящий момент коррекции градиента таким образом, чтобы вычислять второе целевое значение Tm2* крутящего момента.
[0082] Модуль 703 сравнения крутящих моментов сравнивает соответствующие абсолютные величины первого целевого значения Tm1* крутящего момента и второго целевого значения Tm2* крутящего момента друг с другом и задает целевое значение крутящего момента с большим значением равным значению Tm* команды управления крутящим моментом мотора. В ходе движения транспортного средства, второе целевое значение Tm2* крутящего момента меньше первого целевого значения Tm1* крутящего момента, и когда транспортное средство замедляется и доходит до момента непосредственно перед остановкой, второе целевое значение Tm2 крутящего момента становится больше первого целевого значения Tm1* крутящего момента. Соответственно, когда первое целевое значение Tm1* крутящего момента превышает второе целевое значение Tm2* крутящего момента, модуль 703 сравнения крутящих моментов определяет то, что транспортное средство не доходит до момента непосредственно перед остановкой, и задает первое целевое значение Tm1* крутящего момента равным значению Tm* команды управления крутящим моментом мотора. Следует отметить, что когда скорость транспортного средства становится не больше значения по умолчанию (скорости транспортного средства для начала управления остановкой), которое определяет, заранее, скорость вращения мотора или параметр скорости, пропорциональноый скорости вращения мотора, на основе которого можно определять то, что транспортное средство находится в момент времени непосредственно перед остановкой, может определяться то, что транспортное средство находится в момент времени непосредственно перед остановкой.
[0083] Дополнительно, когда второе целевое значение Tm2* крутящего момента становится больше первого целевого значения Tm1* крутящего момента, модуль 703 сравнения крутящих моментов определяет то, что транспортное средство находится в момент времени непосредственно перед остановкой, и модуль 703 сравнения крутящих моментов изменяет значение Tm* команды управления крутящим моментом мотора с первого целевого значения Tm1* крутящего момента на второе целевое значение Tm2* крутящего момента. В это время, крутящий момент коррекции градиента задается равным значению, которое совпадает с оцененным значением Td возмущающего крутящего момента. Соответственно, в то время как второе целевое значение Tm2* крутящего момента задается равным значению Tm* команды управления крутящим моментом мотора, процесс управления замедлением (описан ниже) не выполняется, или коэффициент уменьшения величины коррекции градиента задается равным 0%. Следует отметить, что для того, чтобы поддерживать состояние остановки транспортного средства, второе целевое значение Tm2* крутящего момента сходится к положительному крутящему моменту на восходящей дороге, к отрицательному крутящему моменту на нисходящей дороге, и, в общем, к нулю на ровной дороге.
[0084] Выше описываются подробности передаточной характеристики Gp(s) и процесса управления остановкой. Далее описываются подробности вычисления коэффициента уменьшения величины коррекции градиента и вычисления крутящего момента коррекции градиента на основе коэффициента уменьшения величины коррекции градиента, которые должны выполняться в модуле 403 регулирования величины коррекции градиента, проиллюстрированном на фиг. 4.
[0085] Процесс уменьшения величины коррекции градиента
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процедуру процесса уменьшения величины коррекции градиента в настоящем варианте осуществления. Процесс уменьшения величины коррекции градиента программируется с возможностью многократно выполняться с данным циклом в контроллере 2 мотора.
[0086] На этапе S901, контроллер 2 мотора вычисляет оцененное значение Td возмущающего крутящего момента. Оцененное значение Td возмущающего крутящего момента вычисляется посредством использования модуля наблюдения возмущений, описанного со ссылкой на фиг. 5.
[0087] На следующем этапе S902, контроллер 2 мотора получает скорость V транспортного средства. Скорость V транспортного средства получается из значения определения скорости вращения мотора, скорости вращения колес или параметра скорости, пропорционального им. После того, как скорость V транспортного средства получается, выполняется процесс следующего этапа S903.
[0088] На этапе S903, контроллер 2 мотора получает позицию акселератора в качестве величины приведения в действие педали акселератора водителя таким образом, чтобы обнаруживать запрос на замедление от водителя. Когда позиция акселератора получается, выполняется процесс следующего этапа S904.
[0089] На этапе S904, контроллер 2 мотора определяет то, запрашивает или нет водитель замедление, на основе позиции акселератора, полученной таким способом. Как описано со ссылкой на фиг. 3, позиция акселератора, имеющая предварительно определенное значение или более, представляет собой запрос на ускорение таким образом, что задается положительный крутящий момент мотора (движущий крутящий момент). Между тем, позиция акселератора, меньшая предварительно определенного значения, представляет собой запрос на замедление, и отрицательный крутящий момент мотора (тормозной крутящий момент) задается таким образом, что рекуперативная тормозная сила работает. Соответственно, когда позиция акселератора меньше предварительно определенного значения, можно определять то, что водитель запрашивает замедление. Следует отметить, что предварительно определенное значение, используемое в данном документе, представляет собой нижнее предельное значение позиции акселератора, при котором задается движущий крутящий момент. В случае если определяется то, что водитель запрашивает замедление, чтобы вычислять базовое целевое значение Tm0* крутящего момента в качестве тормозного крутящего момента, запрашиваемого водителем, выполняется процесс следующего этапа S905.
[0090] Между тем, когда полученная позиция акселератора составляет предварительно определенное значение или больше, т.е. позиция акселератора представляет собой позицию акселератора, в которой движущий крутящий момент задается, определяется то, что водитель запрашивает ускорение таким образом, что процесс уменьшения величины коррекции градиента в этой процедуре заканчивается.
[0091] На этапе S905, контроллер 2 мотора обращается к таблице позиций акселератора и крутящих моментов, один пример которой проиллюстрирован на фиг. 3, и вычисляет базовое целевое значение Tm0* крутящего момента в качестве запрашиваемого водителем крутящего момента из позиции θ акселератора и скорости ωm вращения мотора. Когда базовое целевое значение Tm0* крутящего момента вычисляется, процесс следующего этапа S906 выполняется таким образом, чтобы определять то, представляет ли собой поверхность дороги, по которой движется транспортное средство, нисходящую дорогу.
[0092] На этапе S906, контроллер 2 мотора определяет то, меньше или нет градиент (%) поверхности дороги предварительно определенного значения. В данном документе, поскольку следует определять то, представляет или нет поверхность дороги собой нисходящую дорогу, предварительно определенное значение задается равным 0%. Следует отметить, что как описано выше, градиент поверхности дороги может получаться из оцененного значения Td возмущающего крутящего момента. Здесь, оцененное значение Td возмущающего крутящего момента составляет положительный крутящий момент на восходящей дороге, отрицательный крутящий момент на нисходящей дороге, и, в общем, нуль на ровной дороге. Соответственно, на этом этапе, когда оцененное значение Td возмущающего крутящего момента меньше нуля, определяется то, что поверхность дороги представляет собой нисходящую дорогу, так что выполняется процесс следующего этапа S907. Когда оцененное значение Td возмущающего крутящего момента равно нулю или больше, определяется то, что поверхность дороги не представляет собой нисходящую дорогу, так что процесс этапа S909 выполняется без выполнения процесса уменьшения величины коррекции градиента.
[0093] На этапе S907, контроллер 2 мотора определяет то, превышает или нет скорость транспортного средства предварительно определенную скорость транспортного средства. Этот этап представляет собой процесс для того, чтобы обнаруживать время до того, как транспортное средство останавливается во время замедления транспортного средства. Соответственно, в качестве предварительно определенной скорости транспортного средства, используемой в данном документе, задается скорость транспортного средства, которая не меньше скорости транспортного средства (например, 2-3 км/ч), на основе чего можно определять то, что транспортное средство находится в момент времени непосредственно перед остановкой. Дополнительно, чтобы запрещать уменьшение величины коррекции градиента раньше момента времени непосредственно перед остановкой транспортного средства с допустимым запасом времени, предварительно определенная скорость транспортного средства, например, может задаваться равной приблизительно 10 км/ч. Следует отметить, что предварительно определенная скорость транспортного средства, используемая в данном документе в настоящем варианте осуществления, должна задаваться равной 3 км/ч.
[0094] Следует отметить, что предварительно определенная скорость транспортного средства, которая должна сравниваться в данном документе, представляет собой скорость транспортного средства, которая не меньше, по меньшей мере, скорости транспортного средства (скорости транспортного средства для начала управления остановкой), при которой выполняется процесс управления остановкой. Как описано выше, когда управление остановкой для транспортного средства трогается с места, второе целевое значение Tm2* крутящего момента задается равным значению команды управления крутящим моментом мотора. Второе целевое значение Tm2* крутящего момента сходится к оцененному значению Td возмущающего крутящего момента в качестве крутящего момента коррекции градиента наряду с уменьшением скорости вращения мотора, и второе целевое значение Tm2* крутящего момента составляет положительный крутящий момент на восходящей дороге, отрицательный крутящий момент на нисходящей дороге, и, в общем, нуль на ровной дороге. В силу этого, транспортное средство может плавно останавливаться даже на дороге с градиентом, и состояние остановки транспортного средства может поддерживаться. Таким образом, после того, как управление остановкой начинается, значение команды управления крутящим моментом мотора сопоставляется с возмущениями градиента, так что транспортное средство останавливается. Соответственно, когда коррекция градиента выполняется после того, как процесс управления остановкой начинается, значение команды управления крутящим моментом мотора не совпадает с возмущениями градиента, так что транспортное средство не может останавливаться. Соответственно, до того, как транспортное средство останавливается, и, по меньшей мере, в области предварительно определенной скорости транспортного средства или меньше, в которой управление остановкой выполняется таким образом, чтобы инструктировать крутящему моменту мотора сходиться к оцененному значению Td возмущающего крутящего момента, процесс уменьшения величины коррекции градиента не выполняется. В силу этого, в окружении, в котором транспортное средство останавливается, крутящий момент коррекции градиента совпадает с оцененным значением Td возмущающего крутящего момента, так что транспортное средство может плавно останавливаться посредством управления остановкой на дороге с градиентом, и состояние остановки транспортного средства может поддерживаться. Следует отметить, что в случае, если процесс управления остановкой не выполняется, предварительно определенная скорость транспортного средства, которая должна сравниваться на этапе S907, должно составлять значение, по меньшей мере, в 0 км/ч или больше.
[0095] Затем, на этапе S908, контроллер 2 мотора определяет коэффициент (коэффициент уменьшения величины коррекции градиента), чтобы уменьшать величину коррекции градиента, в соответствии со скоростью транспортного средства. Коэффициент уменьшения величины коррекции градиента вычисляется в соответствии со скоростью транспортного средства, полученной на этапе S902, например, на основе взаимосвязи между абсолютным значением скорости транспортного средства [км/ч] (в дальнейшем называемым "скоростью транспортного средства в форме абсолютного значения" или просто "скоростью транспортного средства"), примерно проиллюстрированным на фиг. 10 или 11, и коэффициентом уменьшения величины коррекции градиента [%]. Следует отметить, что этот этап представляет собой процесс, который должен выполняться в модуле 403 регулирования величины коррекции градиента, проиллюстрированном на фиг. 4.
[0096] Фиг. 10 и 11 являются видами, иллюстрирующими один пример взаимосвязи между скоростью транспортного средства [км/ч] и коэффициентом уменьшения величины коррекции градиента [%]. Горизонтальная ось указывает абсолютное значение скорости транспортного средства (км/ч), и вертикальная ось указывает коэффициент уменьшения величины коррекции градиента (%). Коэффициент уменьшения величины коррекции градиента указывает коэффициент для того, чтобы уменьшать величину коррекции градиента, когда величина коррекции градиента (крутящий момент коррекции градиента) в то время, когда оцененное значение Td возмущающего крутящего момента, в общем, совпадающее с сопротивлением вследствие градиента, подавляется из базового целевого значения Tm0* крутящего момента, предположительно составляет 1 (100%). Соответственно, когда коэффициент уменьшения величины коррекции градиента равен 0%, величина коррекции градиента равна 1, и оцененное значение Td возмущающего крутящего момента задается в качестве крутящего момента коррекции градиента без изменений. Когда коэффициент уменьшения величины коррекции градиента составляет 100%, величина коррекции градиента равна нулю (0%), и крутящий момент коррекции градиента задается равным 0. Следует отметить, что, в этой процедуре, должен использоваться коэффициент уменьшения величины коррекции градиента, проиллюстрированный на фиг. 10.
[0097] Коэффициент уменьшения величины коррекции градиента, проиллюстрированный на фиг. 10, задается равным 100% в области, в которой абсолютное значение скорости транспортного средства на нисходящей дороге составляет приблизительно 8 км/ч или больше. В соответствии с уменьшением скорости транспортного средства с 8 км/ч приблизительно до 3 км/ч, коэффициент уменьшения величины коррекции градиента также становится меньшим по мере того, как скорость транспортного средства становится меньшей. Когда скорость транспортного средства становится меньше 3 км/ч, передаточное число редуктора равно 0% таким образом, что величина коррекции градиента не уменьшается. Как проиллюстрировано на чертеже, коэффициент уменьшения величины коррекции градиента задается равным 40%, когда скорость транспортного средства составляет 5 км/ч таким образом, что величина коррекции градиента составляет 0,6 (60%). Соответственно, значение, полученное посредством умножения оцененного значения Td возмущающего крутящего момента на 0,6 (60%), задается в качестве крутящего момента коррекции градиента. В связи с этим, после того, как коэффициент уменьшения величины коррекции градиента, соответствующий скорости транспортного средства, определяется, выполняется процесс следующего этапа S909.
[0098] Следует отметить, что фиг. 11 является видом, иллюстрирующим один пример коэффициента уменьшения величины коррекции градиента, вероятный помимо фиг. 10. Коэффициент уменьшения величины коррекции градиента, проиллюстрированный на фиг. 11, задается равным 70% в области, в которой абсолютное значение скорости транспортного средства на нисходящей дороге составляет приблизительно 3 км/ч или больше. В соответствии с уменьшением скорости транспортного средства с 3 км/ч до 0 км/ч, коэффициент уменьшения величины коррекции градиента также становится меньшим по мере того, как скорость транспортного средства становится меньшей, и когда скорость транспортного средства достигает 0 км/ч, коэффициент уменьшения величины коррекции градиента достигает 0%. Следует отметить, что, в случае если коэффициент уменьшения величины коррекции градиента, проиллюстрированный на фиг. 11, используется в этой процедуре, предварительно определенное значение, которое должно сравниваться со скоростью транспортного средства на этапе S907, задается равным 0 км/ч.
[0099] Здесь, общие аспекты на фиг. 10 и 11 в отношении перехода коэффициента уменьшения величины коррекции градиента заключаются в том, что коэффициент уменьшения величины коррекции градиента равен 0%, по меньшей мере, когда скорость транспортного средства равна 0 км/ч, и в том, что коэффициент уменьшения величины коррекции градиента задается равным меньшему значению по мере того, как скорость транспортного средства является меньшей.
Другими словами, исходя из того, что переход коэффициента уменьшения величины коррекции градиента равен 0%, когда скорость транспортного средства равна 0 км/ч, и коэффициент уменьшения величины коррекции градиента задается равным меньшему значению по мере того, как скорость транспортного средства является меньшей, переход коэффициента уменьшения величины коррекции градиента не ограничен переходами, проиллюстрированными на фиг. 10, 11, и может быть функционально оптимизирован посредством эксперимента и т.п. с точки зрения ощущения при вождении.
[0100] Дополнительно, коэффициент уменьшения величины коррекции градиента дополнительно может регулироваться в соответствии с разностью между настоящим крутящим моментом мотора и крутящим моментом коррекции градиента. Например, в случае если настоящий крутящий момент мотора приближается к крутящему моменту коррекции градиента, можно определять то, что транспортное средство должно останавливаться, так что коэффициент уменьшения величины коррекции градиента дополнительно может регулироваться таким образом, что он уменьшается.
[0101] На этапе S909, контроллер 2 мотора вычисляет крутящий момент коррекции градиента. Более конкретно, крутящий момент коррекции градиента вычисляется посредством умножения оцененного значения Td возмущающего крутящего момента, вычисленного на этапе S901, на коэффициент уменьшения величины коррекции градиента, вычисленный на предыдущем этапе. Как описано касательно крутящего момента коррекции градиента со ссылкой на фиг. 10, в области скоростей в 8 км/ч или больше, коэффициент уменьшения величины коррекции градиента 100 [%], и в силу этого крутящий момент коррекции градиента равен 0. По мере того, как уменьшается скорость транспортного средства с 8 км/ч до 3 км/ч, коэффициент уменьшения величины коррекции градиента становится меньшим, и в силу этого крутящий момент коррекции градиента приближается к оцененному значению Td возмущающего крутящего момента по мере того, как скорость транспортного средства становится меньшей. В диапазоне низких скоростей ниже скорости транспортного средства в 3 км/ч, коэффициент уменьшения величины коррекции градиента равен 0% таким образом, что крутящий момент коррекции градиента совпадает с оцененным значением Td возмущающего крутящего момента.
[0102] Следует отметить, что в случае, если процесс этапа S909 выполняется после того, как определение "Нет" выполняется на этапе S906 или S907, когда коэффициент уменьшения величины коррекции градиента задается равным 100%, вычисляется крутящий момент коррекции градиента Td, совпадающий с оцененным значением возмущающего крутящего момента.
[0103] На этапе S910, контроллер 2 мотора вычисляет первое целевое значение Tm1* крутящего момента. Более конкретно, как проиллюстрировано на фиг. 4, первое целевое значение Tm1* крутящего момента вычисляется посредством суммирования базового целевого значения Tm0* крутящего момента в качестве запрашиваемого водителем крутящего момента с крутящим моментом коррекции градиента, вычисленным на этапе S908. Во время нормального движения, которое не выполняется в момент времени непосредственно перед остановкой транспортного средства, первое целевое значение Tm1* крутящего момента задается равным значению Tm* команды управления крутящим моментом мотора (см. фиг. 7).
[0104] На этапе S911, контроллер 2 мотора управляет мотором 4 посредством первого целевого значения Tm1* крутящего момента, заданного в качестве значения Tm* команды управления крутящим моментом мотора, таким образом, чтобы выполнять управление торможением для транспортного средства на основе запроса на замедление от водителя.
[0105] В дальнейшем описываются преимущества, полученные, когда устройство управления для транспортного средства с электроприводом в одном варианте осуществления, как описано выше, применяется к электрическому транспортному средству со ссылкой на фиг. 12.
[0106] Фиг. 12 является видом для того, чтобы сравнивать один пример (c) результата управления, полученного посредством устройства управления для транспортного средства с электроприводом в настоящем варианте осуществления, с результатами управления (a) и (b) в традиционной технологии. Результат управления (a) указывает режим без коррекции градиента (нормальный режим), и результат управления (b) указывает режим коррекции градиента.
[0107] На фиг. 12 проиллюстрированы результаты управления, полученные в окружении, в котором транспортное средство замедляется и затем останавливается на поверхности дороги, на которой изменяется градиент, и градиент, управляемая по замедлению величина, величина коррекции градиента, замедление транспортного средства и скорость транспортного средства проиллюстрированы последовательно сверху. Следует отметить, что при управлении на этой временной диаграмме, процесс управления остановкой не должен выполняться. Соответственно, при управлении на этой временной диаграмме, первое целевое значение Tm1* крутящего момента всегда задается равным значению Tm* команды управления крутящим моментом мотора, в то время как транспортное средство останавливается после нормального движения транспортного средства.
[0108] С точки зрения градиента, проиллюстрированного на чертеже, положительное значение указывает восходящую дорогу и отрицательное значение указывает нисходящую дорогу. Большее абсолютное значение указывает более крутой градиент. Управляемая по замедлению величина представляет собой замедление, обеспечиваемое для транспортного средства водителем через операцию нажатия педали акселератора, и соответствует базовому целевому значению Tm0* крутящего момента во время замедления посредством позиции акселератора, меньшей предварительно определенного значения. Величина коррекции градиента соответствует крутящему моменту коррекции градиента, проиллюстрированному на фиг. 4. Замедление транспортного средства указывает фактическое замедление во время управления замедлением. Скорость транспортного средства указывает фактическую скорость транспортного средства во время управления замедлением.
[0109] Режим без коррекции градиента (нормальный режим)
Сначала описывается традиционное управление (режим без коррекции градиента (a)), проиллюстрированное в левом конце на чертеже. От времени t1 до времени t3, градиент поверхности дороги изменяется с восходящей дороги на нисходящую дорогу. В течение этого периода, замедление, запрашиваемое водителем, является равномерным, как проиллюстрировано в данном документе. Следует отметить, что в этом режиме, водитель не имеет намерения останавливать транспортное средство, и транспортное средство не должно останавливаться на нисходящей дороге только посредством замедления, запрашиваемого водителем.
[0110] В режиме без коррекции градиента, коррекция градиента не выполняется. Соответственно, замедление транспортного средства затрагивается посредством сопротивления вследствие градиента, так что замедление транспортного средства от момента времени t1 до момента после времени t2 уменьшается (приближается к нулю) относительно равномерной управляемой по замедлению величины по мере того, как градиент восходящей дороги становится умеренным. Затем, после времени t2, градиент поверхности дороги переключается на нисходящую дорогу, так что замедление транспортного средства дополнительно снижается. Затем после времени t2,5, транспортное средство не может замедляться посредством замедления, запрашиваемого водителем, так что транспортное средство переключается на сторону ускорения. Таким образом, в случае если коррекция градиента не выполняется, когда управляемая по замедлению величина не удовлетворяет тормозной силе, которая может останавливать транспортное средство на нисходящей дороге, транспортное средство может ускоряться в противовес запросу на замедление от водителя. В это время, в случае если водитель хочет замедлять или останавливать транспортное средство, водитель дополнительно уменьшает позицию акселератора или нажимает педаль тормоза.
[0111] Режим коррекции градиента
Далее описывается традиционное управление (режим коррекции градиента (b)), проиллюстрированное в центре чертежа. Хотя замедление, запрашиваемое водителем, является равномерным, как проиллюстрировано в данном документе, водитель имеет намерение останавливать транспортное средство в этом режиме. Дополнительно, пунктирная линия, показанная в скорости транспортного средства, указывает скорость транспортного средства посредством управления в нормальном режиме (a).
[0112] В режиме коррекции градиента, коррекция градиента выполняется, но процесс уменьшения величины коррекции градиента не выполняется. Таким образом, величина коррекции градиента (крутящий момент коррекции градиента) в этом режиме всегда совпадает с возмущениями градиента (оцененным значением Td возмущающего крутящего момента). Соответственно, от времени t0 до момента после t4, величина коррекции градиента увеличивается и уменьшается таким образом, что она соответствует изменению градиента поверхности дороги.
[0113] С учетом этого, замедление транспортного средства в режиме коррекции градиента корректируется таким образом, что оно увеличивается в соответствии с градиентом (абсолютное значение увеличивается) на восходящей дороге, в то время как замедление транспортного средства в режиме коррекции градиента корректируется таким образом, что оно уменьшается в соответствии с градиентом (абсолютное значение уменьшается) на нисходящей дороге. Соответственно, хотя замедление, запрашиваемое водителем, является равномерным, замедление, вызываемое в транспортном средстве, всегда является равномерным без влияния посредством изменения градиента до тех пор, пока транспортное средство не останавливается в t4. Как результат, даже в окружении, в котором величина приведения в действие педали акселератора водителя является равномерной, когда градиент поверхности дороги изменяется с восходящей дороги на нисходящую дорогу, скорость транспортного средства может значительно уменьшаться вследствие коррекции градиента.
[0114] В это время, в общем, водитель, ожидающий то, что транспортное средство имеет тенденцию ускоряться на нисходящей дороге, имеет некомфортное ощущение для управления в том, что транспортное средство значительно замедляется в противовес ожиданию.
[0115] Управление в настоящем варианте осуществления
Далее описывается результат управления (c) посредством устройства управления для транспортного средства с электроприводом в настоящем варианте осуществления. В этом результате управления, замедление, запрашиваемое водителем, является равномерным, аналогично режиму без коррекции градиента, и водитель имеет намерение останавливать транспортное средство. Дополнительно, пунктирная линия, показанная в скорости транспортного средства, указывает скорость транспортного средства посредством управления в нормальном режиме (a). Пунктирная линия, показанная в величине коррекции градиента и в скорости транспортного средства, указывает скорость транспортного средства посредством управления в режиме коррекции градиента (b), в котором сопротивление вследствие градиента корректируется до 100%. Следует отметить, что при управлении, которое описывается посредством использования этой временной диаграммы, процесс уменьшения величины коррекции градиента должен выполняться посредством коэффициента уменьшения величины коррекции градиента, проиллюстрированного на фиг. 11.
[0116] От времени t0 до времени t2, поверхность дороги не представляет собой нисходящую дорогу, и в силу этого коррекция градиента, в которой сопротивление вследствие градиента корректируется до 100%, выполняется в настоящем варианте осуществления. Соответственно, управление до времени t2 является аналогичным режиму коррекции градиента (b).
[0117] Здесь, при управлении в настоящем варианте осуществления, в случае если управление замедлением на нисходящей дороге выполняется и скорость транспортного средства превышает 0 км/ч (см. фиг. 11), выполняется процесс уменьшения величины коррекции градиента для уменьшения величины коррекции градиента. Коэффициент уменьшения величины коррекции градиента в этом процессе задается равномерно равным 70%, когда скорость транспортного средства превышает 3 км/ч, как описано со ссылкой на фиг. 11. По мере того, как скорость транспортного средства приближается к 0 км/ч от 3 км/ч, коэффициент уменьшения величины коррекции градиента также становится меньшим, и когда скорость транспортного средства достигает 0 км/ч, коэффициент уменьшения величины коррекции градиента достигает 0%.
[0118] После времени t2, управление замедлением на нисходящей дороге выполняется таким образом, что выполняется процесс уменьшения величины коррекции градиента. Соответственно, от t2 до момента после t4, скорость транспортного средства превышает 3 км/ч таким образом, что величина коррекции градиента уменьшается на 70%. Как результат, замедление транспортного средства уменьшается таким образом, что скорость транспортного средства уменьшается более умеренно, чем при управлении в режиме коррекции градиента (b), при котором сопротивление вследствие градиента корректируется на 100%.
[0119] После этого, скорость транспортного средства становится 3 км/ч или меньше во время t4. Когда скорость транспортного средства составляет 3 км/ч или меньше, коэффициент уменьшения величины коррекции градиента при этом управлении уменьшается с 70% по мере того, как скорость транспортного средства уменьшается до 0 км/ч, и когда скорость транспортного средства достигает 0 км/ч, коэффициент уменьшения величины коррекции градиента достигает 0%. Соответственно, величина коррекции градиента увеличивается по мере того, как скорость транспортного средства уменьшается, и когда скорость транспортного средства достигает нуля, величина коррекции градиента совпадает с оцененным значением возмущающего крутящего момента (пунктирная линия). Таким образом, при этом управлении, замедление транспортного средства от времени t2 до t5 задается больше умеренным, чем замедление транспортного средства в режиме коррекции градиента (b), и в момент времени, когда транспортное средство останавливается, величина коррекции градиента сопоставляется с сопротивлением вследствие градиента, аналогично режиму коррекции градиента (b).
[0120] В силу этого, в то время как некомфортное ощущение, возникающее у водителя, когда коррекция градиента выполняется на 100% в окружении, в котором транспортное средство должно останавливаться, уменьшается, величина коррекции градиента сопоставляется с сопротивлением вследствие градиента в момент времени, когда скорость транспортного средства равна 0 км/ч, в силу этого позволяя надежно останавливать транспортное средство посредством коррекции градиента.
[0121] Как описано выше, устройство управления для транспортного средства с электроприводом согласно одному варианту осуществления представляет собой устройство, включающее в себя мотор 4, выполненный с возможностью подавать в транспортное средство тормозную силу или движущую силу, соответствующую величине приведения в действие педали акселератора, и представляет собой устройство, которое реализует способ управления для транспортного средства с электроприводом таким образом, что когда величина приведения в действие педали акселератора меньше предварительно определенного значения, тормозная сила управляется, и когда величина приведения в действие педали акселератора составляет предварительно определенное значение или больше, движущая сила управляется. Устройство вычисляет целевое значение крутящего момента (базовое целевое значение Tm0* крутящего момента), с которым мотору 4 инструктируется выводить тормозной/движущий крутящий момент, соответствующий величине приведения в действие педали акселератора, оценивает возмущающий крутящий момент, действующий на мотор 4 в качестве сопротивления, соответствующего градиенту поверхности дороги, выполняет коррекцию, чтобы удалять возмущающий крутящий момент из целевого значения крутящего момента, и управляет мотором 4 в соответствии со скорректированным целевым значением крутящего момента (значением Tm* команды управления крутящим моментом мотора). Затем на нисходящей дороге, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и скорость транспортного средства превышает предварительно определенную скорость транспортного средства, величина коррекции (величина коррекции градиента) при коррекции уменьшается.
[0122] В силу этого, поскольку величина коррекции градиента на нисходящей дороге уменьшается в соответствии со скоростью транспортного средства, можно уменьшать зазор между замедлением транспортного средства на нисходящей дороге и замедлением, соответствующим величине приведения в действие педали акселератора водителя, в силу этого позволяя сдерживать некомфортное ощущение, которое должно вызываться у водителя на нисходящей дороге.
[0123] Дополнительно, устройство управления для транспортного средства с электроприводом согласно одному варианту осуществления уменьшает величину коррекции градиента на нисходящей дороге, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и абсолютное значение скорости транспортного средства превышает нуль. В силу этого, по меньшей мере, когда скорость транспортного средства равна нулю, т.е., по меньшей мере, в то время, когда транспортное средство останавливается, величина коррекции градиента не уменьшается, в силу этого позволяя надежно останавливать транспортное средство посредством крутящего момента коррекции градиента на дороге с градиентом.
[0124] Дополнительно, в устройстве управления для транспортного средства с электроприводом в одном варианте осуществления на нисходящей дороге, когда величина приведения в действие педали акселератора меньше предварительно определенного значения и скорость транспортного средства превышает предварительно определенную скорость транспортного средства, коэффициент (коэффициент уменьшения величины коррекции градиента) для того, чтобы уменьшать величину коррекции градиента, уменьшается по мере того, как уменьшается скорость транспортного средства. В силу этого, в то время как величина коррекции градиента уменьшается таким образом, что транспортное средство должно останавливаться, можно эффективно сдерживать некомфортное ощущение при управлении, которое становится относительно большим по мере того, как скорость транспортного средства является большей.
[0125] Дополнительно, устройство управления для транспортного средства с электроприводом согласно одному варианту осуществления определяет скорость вращения мотора 4 или параметр скорости, пропорциональный скорости вращения, и когда скорость транспортного средства становится скоростью транспортного средства для начала управления остановкой или меньше, устройство управления управляет мотором 4 без уменьшения величины коррекции градиента таким образом, что крутящий момент мотора сходится к возмущающему крутящему моменту наряду с уменьшением скорости вращения мотора 4 или параметра скорости. Дополнительно, скорость транспортного средства для начала управления остановкой представляет собой скорость транспортного средства, при которой транспортное средство находится в момент времени непосредственно перед остановкой, и скорость вращения мотора 4 или параметр скорости меньше значения по умолчанию, определенного заранее. В силу этого, в то время как некомфортное ощущение, которое должно вызываться у водителя на нисходящей дороге, сдерживается, можно плавно останавливать транспортное средство после того, как транспортное средство доходит до момента непосредственно перед остановкой на дороге с градиентом, и поддерживать состояние остановки транспортного средства.
[0126] В связи с этим, выше описывается устройство управления для транспортного средства с электроприводом согласно одному варианту осуществления настоящего изобретения, но вариант осуществления предоставляет только часть настоящего изобретения и не имеет намерение ограничивать объем настоящего изобретения конкретными конфигурациями варианта осуществления. Например, в вышеприведенном описании, в случае если позиция акселератора меньше предварительно определенного значения, как описано со ссылкой на фиг. 3, определяется то, что водитель имеет намерение замедлять транспортное средство (см. этап S904 на фиг. 9). Тем не менее, может определяться то, что водитель имеет намерение замедлять транспортное средство, когда позиция акселератора меньше частичной эквивалентной величины. Следует отметить, что частичная эквивалентная величина при использовании в данном документе указывает позицию акселератора, которая достигает состояния, в котором транспортное средство движется таким образом, чтобы сохранять заданную скорость, и ускорение или замедление не вызывается в транспортном средстве. Тем не менее, позиция акселератора с частичной эквивалентной величиной варьируется в зависимости от заданного значения в таблице позиций акселератора и крутящих моментов, как описано на фиг. 3, и в силу этого, когда заданное значение таблицы позиций акселератора и крутящих моментов изменяется, позиция акселератора с частичной эквивалентной величиной также изменяется наряду с этим.
[0127] Дополнительно, в вышеприведенном описании, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и транспортное средство с электроприводом находится в момент времени непосредственно перед остановкой, значение Tm* команды управления крутящим моментом мотора сходится к оцененному значению скорректированного возмущающего крутящего момента Td наряду с уменьшением скорости вращения электрического мотора 4. Тем не менее, параметр скорости, такой как скорость вращения колес, скорость кузова транспортного средства или скорость вращения ведущего вала, является пропорциональным скорости вращения электрического мотора 4, и в силу этого значение Tm* команды управления крутящим моментом мотора может сходиться к оцененному значению Td возмущающего крутящего момента наряду с уменьшением параметра скорости, пропорционального скорости вращения электрического мотора 4. Следует отметить, что, во-первых, управление остановкой не обязательно может выполняться непосредственно перед остановкой транспортного средства, и процесс управления остановкой на этапе S203 на фиг. 2 может опускаться.
[0128] Настоящая заявка испрашивает приоритет заявки на патент (Япония) № 2017-010568, поданной в Патентное бюро Японии 24 января 2017 года, и содержимое этой заявки полностью содержится в данном документе по ссылке.


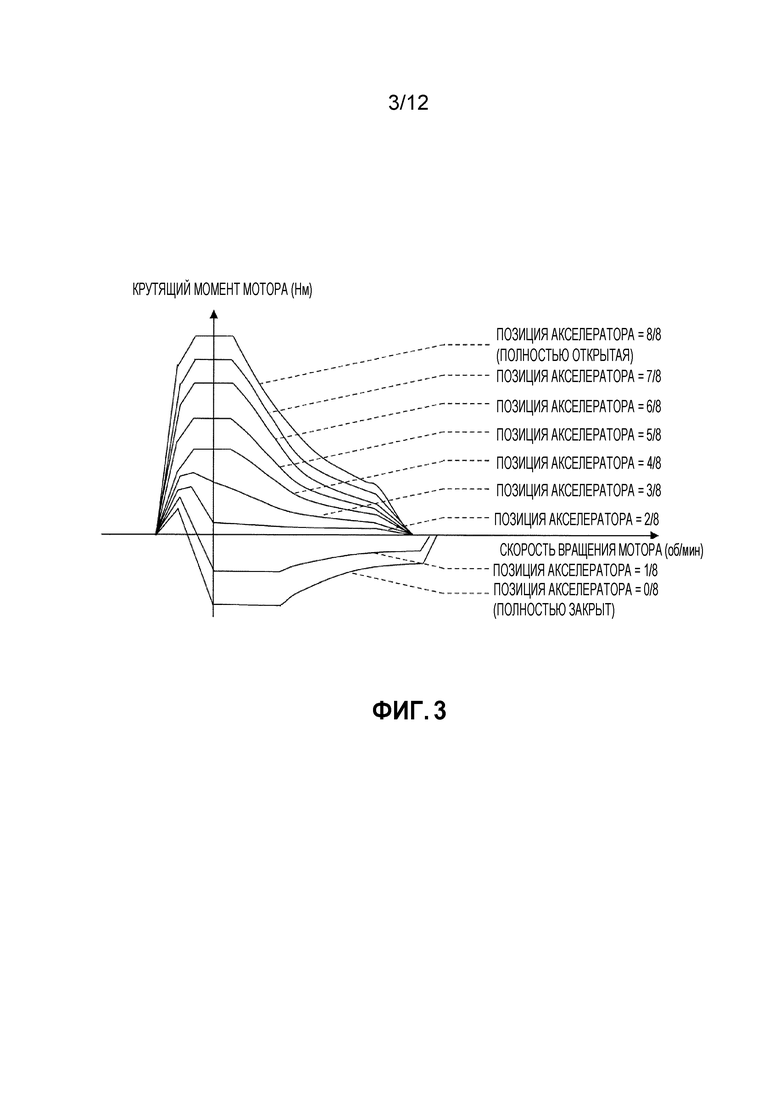


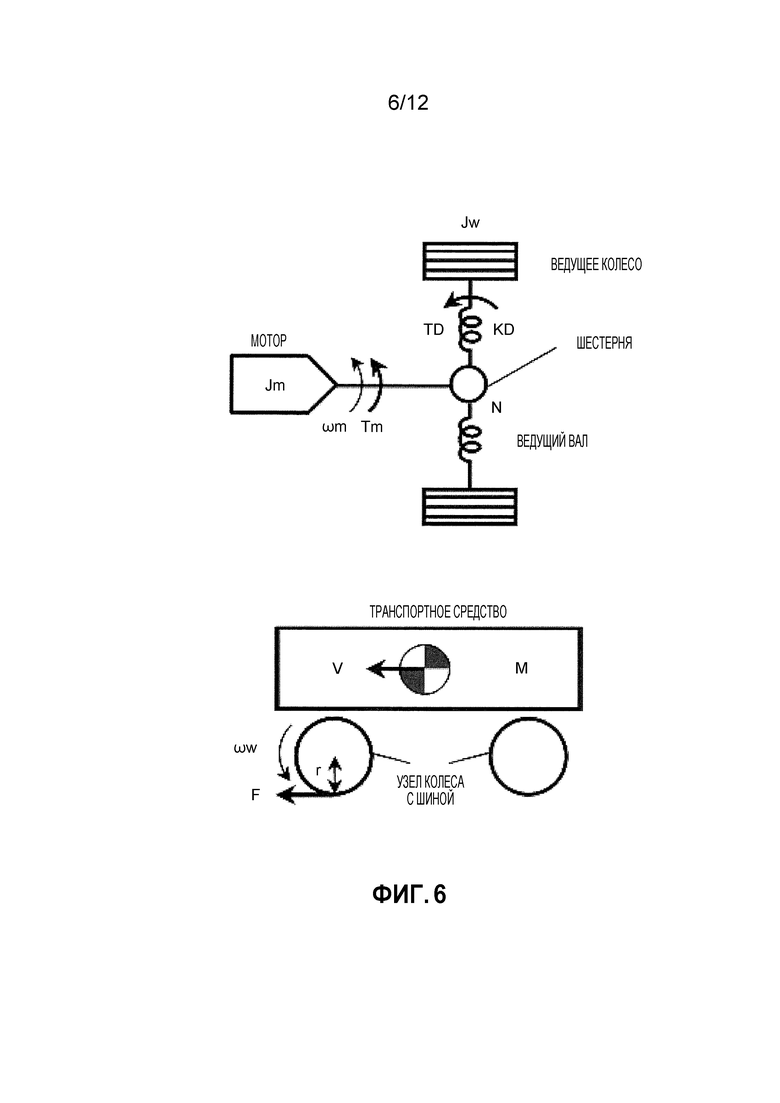


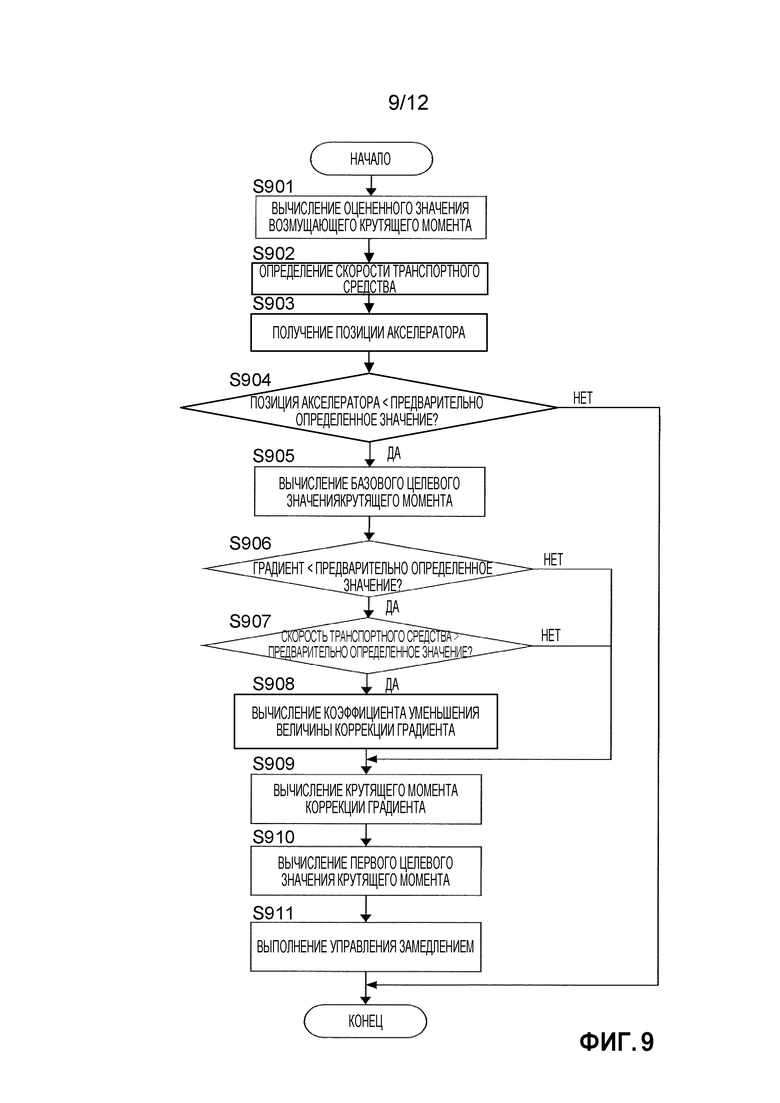


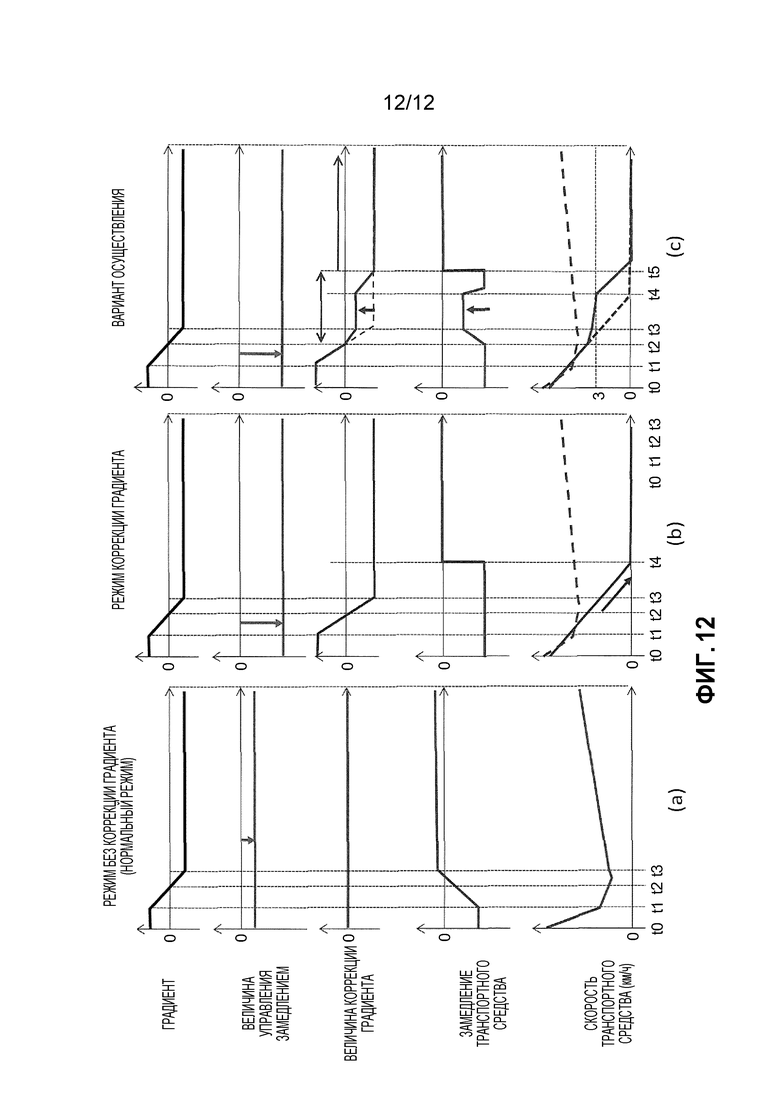
Группа изобретений относится к управлению тяговой системой транспортных средств с электротягой. Способ управления электромотором для транспортного средства с электроприводом заключается в следующем. Вычисляют целевое значение крутящего момента, с которым мотору инструктируется выводить тормозной/движущий крутящий момент, соответствующий величине приведения в действие педали акселератора. Оценивают возмущающий крутящий момент, действующий на мотор, в качестве сопротивления, соответствующего градиенту поверхности дороги. Выполняют коррекцию, чтобы удалять возмущающий крутящий момент из целевого значения крутящего момента. Управляют мотором в соответствии с целевым значением крутящего момента, подвергнутым коррекции. Уменьшают величину коррекции при коррекции на нисходящей дороге, только когда величина приведения в действие педали акселератора меньше предварительно определенного значения и скорость транспортного средства превышает предварительно определенную скорость транспортного средства. Также заявлено устройство управления электромотором для транспортного средства с электроприводом. Технический результат заключается в повышении комфорта управлением транспортного средства с электроприводом. 2 н. и 4 з.п. ф-лы, 12 ил.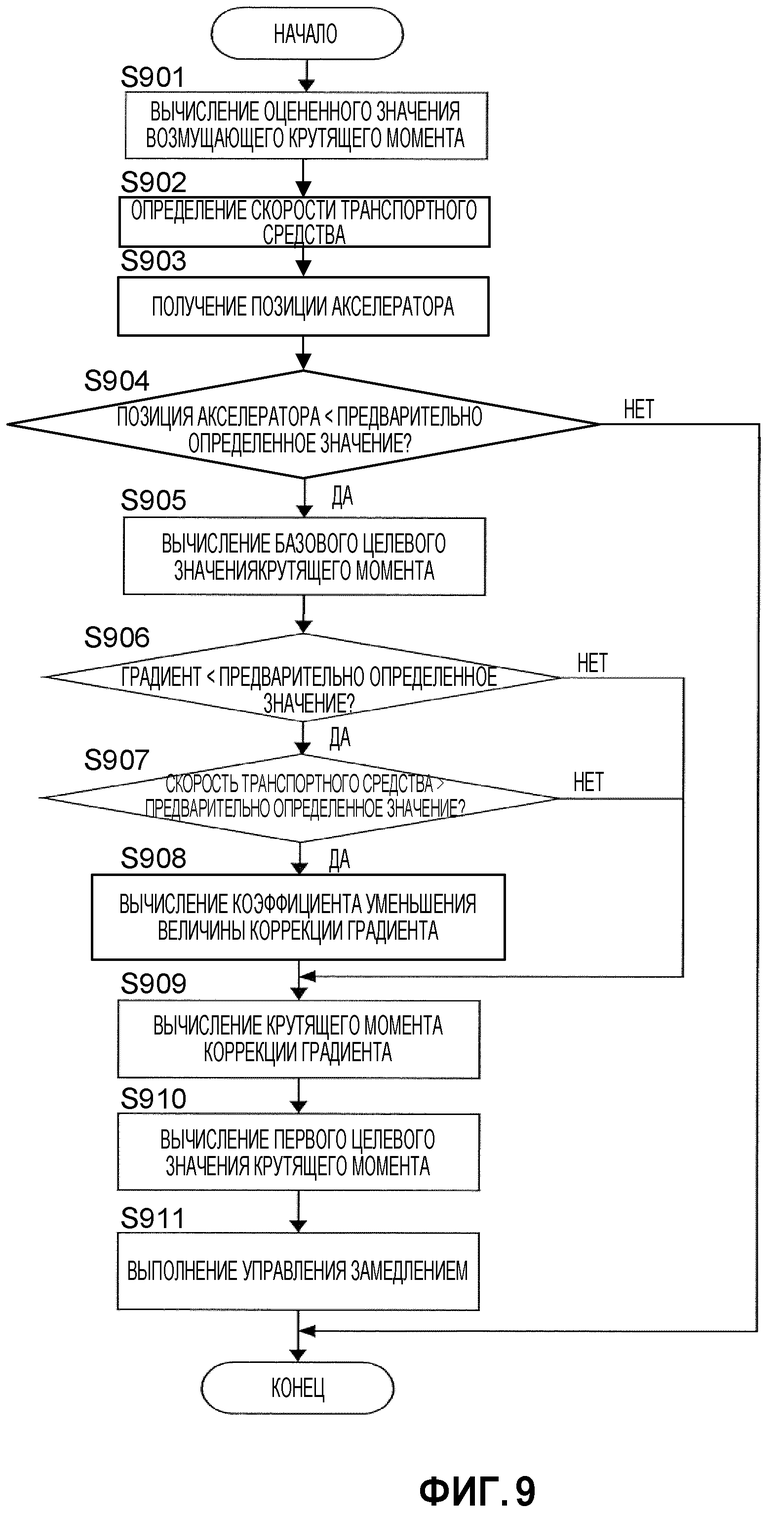
1. Способ управления электромотором для транспортного средства с электроприводом, включающего в себя мотор, выполненный с возможностью подавать в транспортное средство тормозную силу или движущую силу, соответствующую величине приведения в действие педали акселератора, причем способ управления предназначен для управления тормозной силой, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и управления движущей силой, когда величина приведения в действие педали акселератора составляет предварительно определенное значение или больше, при этом способ управления содержит этапы, на которых:
- вычисляют целевое значение крутящего момента, с которым мотору инструктируется выводить тормозной/движущий крутящий момент, соответствующий величине приведения в действие педали акселератора;
- оценивают возмущающий крутящий момент, действующий на мотор, в качестве сопротивления, соответствующего градиенту поверхности дороги;
- выполняют коррекцию, чтобы удалять возмущающий крутящий момент из целевого значения крутящего момента;
- управляют мотором в соответствии с целевым значением крутящего момента, подвергнутым коррекции; и
- уменьшают величину коррекции при коррекции на нисходящей дороге, только когда величина приведения в действие педали акселератора меньше предварительно определенного значения и скорость транспортного средства превышает предварительно определенную скорость транспортного средства.
2. Способ управления электромотором для транспортного средства с электроприводом по п. 1, в котором:
- предварительно определенная скорость транспортного средства имеет значение, абсолютное значение которого превышает нуль.
3. Способ управления электромотором для транспортного средства с электроприводом по п. 1 или 2, в котором:
- на нисходящей дороге, когда величина приведения в действие педали акселератора меньше предварительно определенного значения и скорость транспортного средства превышает предварительно определенную скорость транспортного средства, коэффициент для того, чтобы уменьшать величину коррекции, уменьшается по мере того, как уменьшается скорость транспортного средства.
4. Способ управления электромотором для транспортного средства с электроприводом по любому из пп. 1, 2, в котором:
- определяется скорость вращения мотора или параметр скорости, пропорциональный скорости вращения; и
- когда скорость транспортного средства становится скоростью транспортного средства для начала управления остановкой или меньше, мотор управляется без уменьшения величины коррекции таким образом, что крутящий момент мотора сходится к возмущающему крутящему моменту наряду с уменьшением скорости вращения мотора или параметра скорости.
5. Способ управления электромотором для транспортного средства с электроприводом по п. 4, в котором:
- то, что скорость транспортного средства представляет собой скорость транспортного средства для начала управления остановкой или меньше, указывает то, что транспортное средство находится в момент времени непосредственно перед остановкой и скорость вращения мотора или параметр скорости меньше значения по умолчанию, определенного заранее.
6. Устройство управления электромотором для транспортного средства с электроприводом, причем устройство управления применяется к транспортному средству с электроприводом, включающему в себя мотор, выполненный с возможностью подавать в транспортное средство тормозную силу или движущую силу, соответствующую величине приведения в действие педали акселератора, причем устройство управления предназначено для управления тормозной силой, когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и управления движущей силой, когда величина приведения в действие педали акселератора составляет предварительно определенное значение или больше, причем устройство управления выполнено с возможностью:
- вычислять целевое значение крутящего момента, при котором мотору инструктируется выводить тормозной/движущий крутящий момент, соответствующий величине приведения в действие педали акселератора;
- оценивать возмущающий крутящий момент, действующий на мотор, в качестве сопротивления, соответствующего градиенту поверхности дороги;
- выполнять коррекцию, чтобы удалять возмущающий крутящий момент из целевого значения крутящего момента;
- управлять мотором в соответствии с целевым значением крутящего момента, подвергнутым коррекции; и
- уменьшать величину коррекции при коррекции на нисходящей дороге, только когда величина приведения в действие педали акселератора меньше предварительно определенного значения, и скорость транспортного средства превышает предварительно определенную скорость транспортного средства.
| JP 2009303342 A, 24.12.2009 | |||
| WO 2016189670 A1, 01.12.2016 | |||
| WO 2016120979 A1, 04.08.2016 | |||
| АВТОМОБИЛЬ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2003 |
|
RU2290330C2 |

