Изобретение относится к области машиностроения и может быть использовано в тех областях, где необходимо осуществить раскрытие посадочных опор при осуществлении мягкой посадки объекта, например, в ракетно-космической технике при посадке возвращаемого (посадочного) аппарата пилотируемого космического корабля на Землю или другие планеты по вертикальной схеме.
Известна система раскрытия посадочных опор в составе советского лунного корабля, содержащая блок управления с кабелями связи и шарниры крепления посадочных опор, которые располагались на наружной поверхности корпуса лунного корабля. Перед посадкой посадочные опоры приводились из исходного в рабочее положение раскрытием пирозамков, после чего пружинные механизмы подкосов раскрывали посадочные опоры. Описание системы раскрытия посадочных опор советского лунного корабля приведено в книге В.М. Филина «Воспоминания о лунном корабле», издательство «Культура», 1992.
Система раскрытия посадочных опор космического корабля Х-38, выбранная в качестве прототипа (см. материалы NASA Х-38 Landing Gear Development, Adalbert Wagner, 1998 г), содержит блок управления с кабелями связи и размещенные в посадочных опорах устройства разделения - пироустройства, устройства выдвижения телескопических штоков - пружинные механизмы выдвижения. Посадочные опоры выдвигаются через вырезы в корпусе и теплозащитном покрытии, открываемые пироустройствами непосредственно перед приземлением.
Раскрытие посадочных опор начинается с момента подачи из блока управления по кабелям связи электрической команды на срабатывание пироустройств, фиксирующих опоры в убранном положении. После этого опора под действием сил гравитации совершает поворотное движение, затем при помощи пружинного привода выдвигается телескопический шток, и опора при помощи фиксирующих подкосов занимает рабочее положение.
Недостатком системы раскрытия посадочных опор - прототипа, является однократность использования из-за необходимости замены устройств фиксации посадочных опор, связанного с использованием пироустройств.
Задачей системы раскрытия посадочных опор является обеспечение многократности раскрытия и складывания посадочных опор космического корабля без замены их механизмов фиксации.
Техническим результатом настоящего изобретения является обеспечение многократности использования системы раскрытия посадочных опор.
Технический результат достигается тем, что в систему раскрытия посадочных опор космического корабля, содержащую блок управления с кабелями связи, устройства разделения, устройства выдвижения телескопических штоков в отличие от прототипа введен пневмоблок и пневмоколлекторы, пневматические раздвижные упоры с контактными датчиками их поворота, устройства разделения и устройства выдвижения телескопических штоков выполнены пневматическими, при этом пневматические раздвижные упоры кинематически связаны с указанными контактными датчиками поворота раздвижных упоров, а устройства выдвижения телескопических штоков снабжены датчиками выдвижения штоков и кинематически связаны с этими датчиками, причем пневмоблок выполнен в виде баллонов высокого давления со сжатым газом, связанных трубопроводами с заправочными клапанами и с электропневмоклапанами, при этом первый из электропневмоклапанов связан входом с первым баллоном, а выходом соединен через первый пневмоколлектор с тормозными полостями пневматических раздвижных упоров, второй электропневмоклапан связан входом со вторым баллоном, а выходом соединен через второй пневмоколлектор с устройствами разделения, а третий электропневмоклапан входом связан с выходом первого электропневмоклапана, а выходом соединен через третий пневмоколлектор с полостями устройств выдвижения телескопических штоков, при этом четвертый электропневмоклапан связан входом с выходом второго электропневмоклапана, а выходом соединен через четвертый пневмоколлектор с разгонными полостями пневматических раздвижных упоров, вход пятого электропневмоклапана связан с выходом первого электропневмоклапана и с входом третьего электропневмоклапана, а выход соединен с атмосферой, при этом электрические входы электропневмоклапанов и электрические выходы контактных датчиков поворота раздвижных упоров и датчиков выдвижения телескопических штоков кабелями связи соединены с блоком управления.
Использование пневматических устройств позволяет обеспечить многоразовость системы раскрытия посадочных опор.
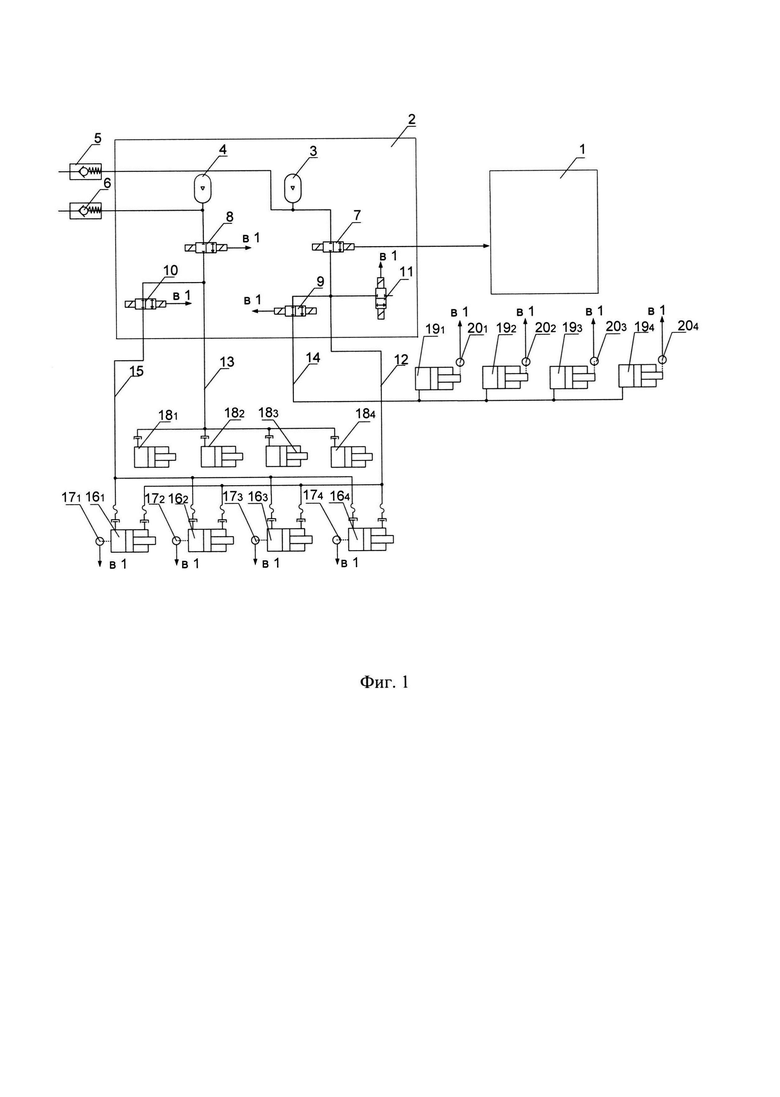
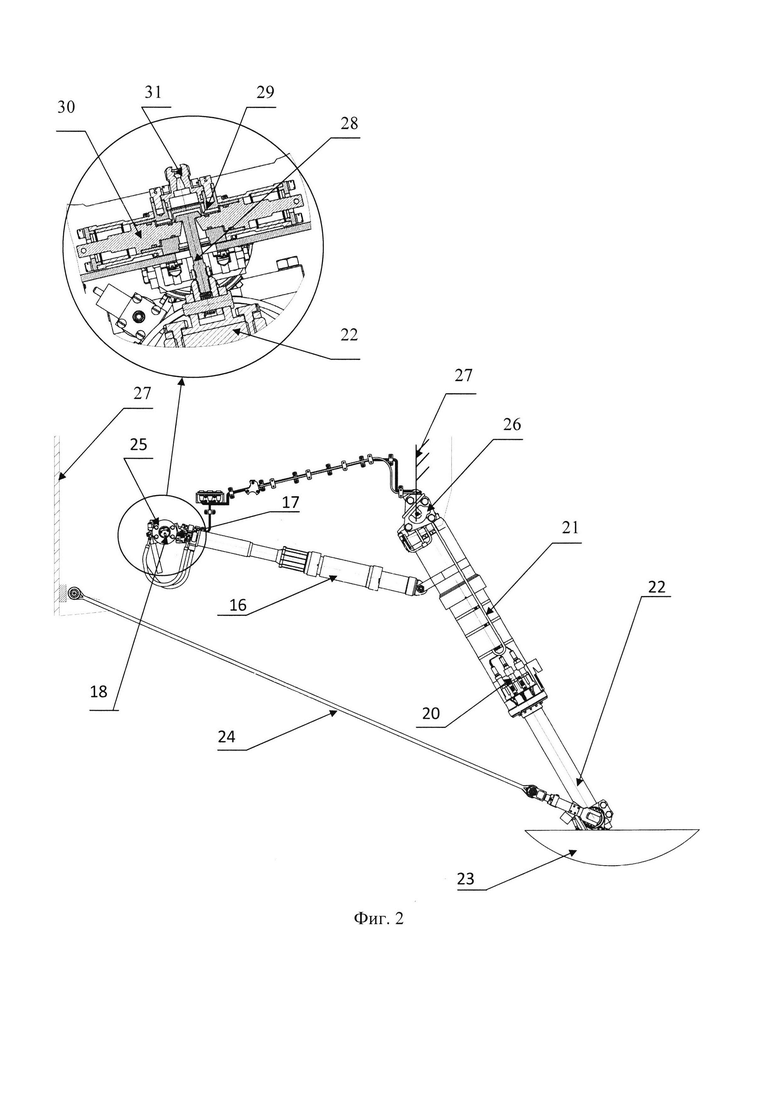
Осуществление заявленного технического решения поясняется с помощью чертежей, на которых на фиг. 1 приведена система раскрытия посадочных опор космического корабля, а на фиг. 2 схема посадочной опоры, раскрытие которой предлагается.
1 - блок управления
2 - пневмоблок;
3, 4 - баллоны высокого давления;
5, 6 - клапаны заправочные;
7, 8, 9, 10, 11 - электропневмоклапаны;
12, 13, 14, 15 - пневмоколлекторы;
161, 162, 163, 164 - пневматические раздвижные упоры;
171, 172, 173, 174 - контактные датчики поворота раздвижных упоров;
181, 182, 183, 184 - устройства разделения;
191, 192, 193, 194 - устройства выдвижения телескопических штоков;
201, 202, 203, 204 - датчики выдвижения телескопических штоков;
21 - главный цилиндр;
22 - телескопический шток;
23 - опорная тарель;
24 - тросы;
25 - поперечная балка;
26 - кронштейн;
27 - корпус космического корабля;
28 - тяга;
29 - корпус устройства разделения;
30 - шток устройства разделения;
31 - пневмоштуцер.
На фиг. 1 представлена схема системы раскрытия посадочных опор космического корабля. Пневмоблок 2 включает в себя в два баллона высокого давления 3 и 4 которые через трубопроводы связаны с клапанами заправочными 5 и 6 с входами электропневмоклапанов 7 и 8. Выход электропневмоклапана 7 связан с входом электропневмоклапанов 9 и 11, выход электропневмоклапана 8 связан с входом электропневмоклапана 10. При этом выход электропневмоклапана 11 связан с атмосферой. Электрические входы электропневмоклапанов 7, 8, 9, 11 связаны с блоком управления 1. Выход электропневмоклапана 7 через пневмоколлектор 12 связан с тормозными полостями пневматических раздвижных упоров 161, 162, 163, 164. Пневматические раздвижные упоры 161, 162, 163, 164 кинематически связаны с контактными датчиками поворота упора раздвижного 171, 172, 173, 174, электрические выходы которых связаны с блоком управления 1. Выход электропневмоклапана 8 через пневмоколлектор 13 связан с устройствами разделения 181, 182, 183, 184. Выход электропневмоклапана 9 через пневмоколлектор 14 связан с устройствами выдвижения телескопических штоков 191, 192, 193, 194. Выход электропневмоклапана 10 через пневмоколлектор 15 связан с разгонными полостями пневматических раздвижных упоров 161, 162, 163, 164, устройства выдвижения телескопических штоков 191, 192, 193, 194 кинематически связаны с датчиками выдвижения телескопических штоков 201, 202, 203, 204, электрические выходы которых связаны блоком управления 1.
На фиг. 2 представлена схема посадочной опоры в раскрытом (рабочем) положении. Центральная стойка посадочной опоры содержит главный цилиндр 21, телескопический шток 22 и опорную тарель 23. Тросы 24 с одной стороны крепятся к телескопическому штоку 22, а другими концами к корпусу космического корабля 27. На поверхности главного цилиндра 21 расположены датчики выдвижения телескопических штоков 20, предназначенные для формирования сигнала в блок управления 1 о выдвижении штока. Пневматический раздвижной упор 16 представляет собой механизм, состоящий из двух частей: пневматической в виде цилиндра со штоком и замковой в виде зубчатой поверхности с цанговым механизмом. Цилиндр пневматического раздвижного упора 16 содержит две полости: полость торможения и полость разгона. На оси пневматического раздвижного упора 16 со стороны замковой части расположен контактный датчик поворота раздвижного упора 17. На поперечной балке 25 расположено устройство разделения 18, конструкция которого подробно раскрыта в патенте №2494289 с приоритетом от 10.02.2012, оно состоит из корпуса 29, внутри которого расположены подпружиненные штоки 30, и тяги 28, на корпусе 29 расположен пневмоштуцер 31. Тяга 28 связана с центральной стойкой через телескопический шток 22. Центральная стойка посадочной опоры крепится к корпусу космического корабля 27 при помощи кронштейна 26.
Рассмотрим работу системы раскрытия посадочных опор.
Перед началом работы баллоны высокого давления 3 и 4 заправлены сжатым газом через клапаны заправочные 5 и 6 до давления, например, 150 атм. При подаче команды с блока управления 1 на вход электропневмоклапана 7 он открывается, и сжатый газ из баллона 3 поступает в тормозные полости пневматических раздвижных упоров 161, 162, 163, 164. Через промежуток времени, например, 5 с из блока управления 1 подается команда на вход электропневмоклапана 8, при открытии которого сжатый газ из баллона 4 поступает через штуцеры 31 в полости устройств разделения 181, 182, 183, 184. При их срабатывании центральные стойки посадочных опор высвобождаются из сложенного положения и начинают поворачиваться под действием сил гравитации.
В процессе поворота центральных стоек относительно кронштейнов 26 начинают поворачиваться связанные с центральными стойками пневматические раздвижные упоры 161, 162, 163, 164, при этом после отклонения осей пневматических раздвижных упоров на определенный угол, например, 19° срабатывают контакты соединенных с ними контактных датчиков поворота раздвижных упоров 171, 172, 173, 174.
По сигналу с контактных датчиков поворота раздвижных упоров блок управления 1 формирует команду на срабатывание электропневмоклапана 9, с выхода которого сжатый газ из баллона 3 и электропневмоклапанов 7 и 9 поступает на устройства выдвижения телескопических штоков 191, 192, 193, 194. В результате в посадочных опорах происходит выдвижение телескопических штоков 22, в конце хода осуществляется механическая фиксация их относительно главных цилиндров 21 с помощью внутренних замков и происходит срабатывание датчиков выдвижения телескопических штоков 201, 202, 203, 204.
По сигналу с датчиков выдвижения телескопических штоков блок управления 1 формирует команду на открытие электропневмоклапанов 10 и 11, с выхода электропневмоклапана 10 сжатый газ поступает в разгонные полости пневматических раздвижных упоров 161, 162, 163, 164, при этом штоки пневматических раздвижных упоров выдвигаются и создают усилия на центральные стойки, происходит их дополнительный поворот, что приводит к натяжению тросов 24 посадочных опор, при этом центральные стойки устанавливаются в рабочее положение. Благодаря открытию электропневмоклапана 11 сжатый воздух из тормозных полостей пневматических раздвижных упоров свободно выходит в атмосферу и не препятствует выдвижению их штоков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2665154C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2675042C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2015 |
|
RU2621416C2 |
| ПНЕВМОПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 2013 |
|
RU2529988C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2012 |
|
RU2521451C2 |
| СПОСОБ ЗАПРАВКИ ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО АППАРАТА КСЕНОНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2341424C2 |
| ЛОЖЕМЕНТНАЯ ОПОРА ДЛЯ ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ НЕЖЕСТКИХ И НЕВИБРОСТОЙКИХ ГРУЗОВ | 2005 |
|
RU2353850C2 |
| Сильфонный насос-дозатор - регулятор расхода | 2016 |
|
RU2636949C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ИСПЫТАНИЯ ГЕРМЕТИЧНОСТИ ЗАМКНУТЫХ ОБЪЕМОВ | 1998 |
|
RU2157981C2 |
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015936C1 |
Изобретение относится к средствам мягкой вертикальной посадки, главным образом космического объекта. В системе раскрытия посадочных опор (ПО) использованы приводные механизмы: раздвижные упоры и устройства выдвижения телескопических штоков ПО, а также устройства разделения ПО - пневматического типа. Данные механизмы и устройства через трубопроводы с заправочными и электропневмоклапанами и через пневмоколлекторы связаны с баллонами высокого давления пневмоблока. Указанные раздвижные упоры и устройства выдвижения снабжены соответственно контактными датчиками поворота и датчиками выдвижения, связанными с блоком управления. Данный блок управляет работой системы при разделении ПО, их развороте и выдвижении штоков ПО в рабочее положение при посадке. Техническим результатом изобретения является обеспечение многократности раскрытия ПО. 2 ил.
Система раскрытия посадочных опор космического корабля, содержащая блок управления с кабелями связи, устройства разделения, устройства выдвижения телескопических штоков, отличающаяся тем, что она снабжена пневмоблоком, пневмоколлекторами и пневматическими раздвижными упорами с контактными датчиками их поворота, устройства разделения и устройства выдвижения телескопических штоков выполнены пневматическими, при этом пневматические раздвижные упоры кинематически связаны с указанными контактными датчиками поворота раздвижных упоров, а устройства выдвижения телескопических штоков снабжены датчиками выдвижения штоков и кинематически связаны с этими датчиками, причем пневмоблок выполнен в виде баллонов высокого давления со сжатым газом, связанных трубопроводами с заправочными клапанами и с электропневмоклапанами, при этом первый из электропневмоклапанов связан входом с первым баллоном, а выходом соединен через первый пневмоколлектор с тормозными полостями пневматических раздвижных упоров, второй электропневмоклапан связан входом со вторым баллоном, а выходом соединен через второй пневмоколлектор с устройствами разделения, а третий электропневмоклапан входом связан с выходом первого электропневмоклапана, а выходом соединен через третий пневмоколлектор с полостями устройств выдвижения телескопических штоков, при этом четвертый электропневмоклапан связан входом с выходом второго электропневмоклапана, а выходом соединен через четвертый пневмоколлектор с разгонными полостями пневматических раздвижных упоров, вход пятого электропневмоклапана связан с выходом первого электропневмоклапана и с входом третьего электропневмоклапана, а выход соединен с атмосферой, при этом электрические входы электропневмоклапанов и электрические выходы контактных датчиков поворота раздвижных упоров и датчиков выдвижения телескопических штоков кабелями связи соединены с блоком управления.
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2015 |
|
RU2621416C2 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2012 |
|
RU2521451C2 |
| ПНЕВМОПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 2013 |
|
RU2529988C1 |
| US 6227494 B1, 08.05.2001 | |||
| US 20070221783 A1, 27.09.2007. | |||

