Изобретение относится к области машиностроения и может быть использовано в тех областях, где необходимо осуществить мягкую посадку объекта, например, в ракетно-космической технике при посадке возвращаемого (посадочного) аппарата пилотируемого космического корабля на Землю или другие планеты по вертикальной схеме.
Известна схема посадочного устройства, включающего четыре посадочных опоры, расположенные в корпусе космического корабля азимутально через 90°, описанная в патенте на изобретение RU №2521451 С2, 27.01.1998, МПК: F42B 15/36.
Посадочная опора включает центральную стойку, состоящую из главного цилиндра с сотовым энергопоглотителем, телескопического штока, расположенного внутри него пневматического механизма выдвижения телескопического штока и снабженную узлом крепления к корпусу космического корабля, а также опорную тарель, шарнирно связанную с телескопическим штоком, откидную раму, прикрепляемую к корпусу космического корабля при помощи кронштейнов, два подкоса, связанных с откидной рамой, устройство фиксации главного цилиндра в убранном положении, пневмопривод вращательного типа и датчик угла поворота рамы, установленные на оси вращения откидной рамы.
Известна также схема посадочного устройства космического корабля° - ближайший аналог (прототип), описанный в заявке на изобретение RU №2015146280, дата публикации 03.05.2017.
Посадочное устройство содержит четыре посадочных опоры, каждая из которых включает центральную стойку, имеющую главный цилиндр с сотовым энергопоглотителем и узел крепления к корпусу космического корабля, телескопический шток и механизм выдвижения телескопического штока, расположенный внутри него, опорную тарель, шарнирно связанную с телескопическим штоком, датчик угла поворота. Посадочная опора снабжена двумя тросами, при этом один конец троса соединен с телескопическим штоком со стороны опорной тарели, а второй конец троса закреплен в нише корпуса космического корабля, в котором размещена посадочная опора в исходном положении, а также введен раздвижной упор, шток которого соединен с главным цилиндром, а корпус - с поперечной балкой, закрепленной в нише, в которой размещена посадочная опора, а датчик угла поворота установлен на оси вращения раздвижного упора.
Указанная схема обеспечивает более высокую степень устойчивости корабля к опрокидыванию, чем схема-аналог посадочного устройства, однако в определенных условиях посадки космического корабля не обеспечивается необходимое значение клиренса, что может привести к контакту корпуса космического корабля с грунтом, его деформации и, как следствие, к потере многоразовости космического корабля. Это может наступить, например, при неблагоприятном сочетании вертикальной и горизонтальной скоростей космического корабля, углов его подхода к посадочной поверхности и угла наклона самой поверхности или при наличии локального препятствия (кочки). В этом случае - при превышении располагаемого хода раздвижного упора на сжатие резко возрастает усилие на штоке раздвижного упора, что может привести к разрушению упора или поперечной балки его крепления и, как следствие, подламыванию центральной стойки.
Задачей предлагаемого посадочного устройства является повышение безопасности посадки космического корабля сегментно-конической формы.
Техническим результатом настоящего изобретения является повышение безопасности посадки космического корабля на поверхности планеты со сложным рельефом.
Технический результат достигается за счет того, что в посадочном устройстве космического корабля, содержащем посадочные опоры, каждая из которых включает центральную стойку, имеющую главный цилиндр с сотовым энергопоглотителем и узел крепления к корпусу космического корабля, телескопический шток и механизм выдвижения телескопического штока, расположенный внутри него, опорную тарель, шарнирно связанную с телескопическим штоком, датчик угла поворота, датчик выдвижения штока, два троса и раздвижной упор, шток которого соединен с главным цилиндром, а корпус - с поперечной балкой, закрепленной в нише, в которой размещена посадочная опора, в отличие от известного, главный цилиндр снабжен рычагом в плоскости вращения центральной стойки с противоположной стороны от телескопического штока, а раздвижной упор выполнен в виде пневмоцилиндра, шток которого шарнирно соединен с рычагом главного цилиндра в точке, расположенной на расстоянии, равному радиусу окружности с центром на оси вращения центральной стойки, при этом вход обратного клапана связан с магистралью подвода сжатого газа из пневмосистемы, а его выход связан со штоковой полостью пневмоцилиндра, причем вход предохранительного клапана связан также со штоковой полостью пневмоцилиндра, а его выход сообщен с атмосферой, при этом датчик угла поворота установлен на оси вращения центральной стойки.
Таким образом, благодаря данному техническому решению обратный клапан обеспечивает запирание объема сжатого газа в штоковой полости пневмоцилиндра, что повышает сопротивление вращению центральной стойки к центру космического корабля (подламыванию), возникающему, например, при попадании опорной тарели на локальное препятствие (кочку). При дальнейшем повороте центральной стойки в сторону центра повышение давления в штоковой полости пневмоцилиндра ограничивается давлением настройки предохранительного клапана.
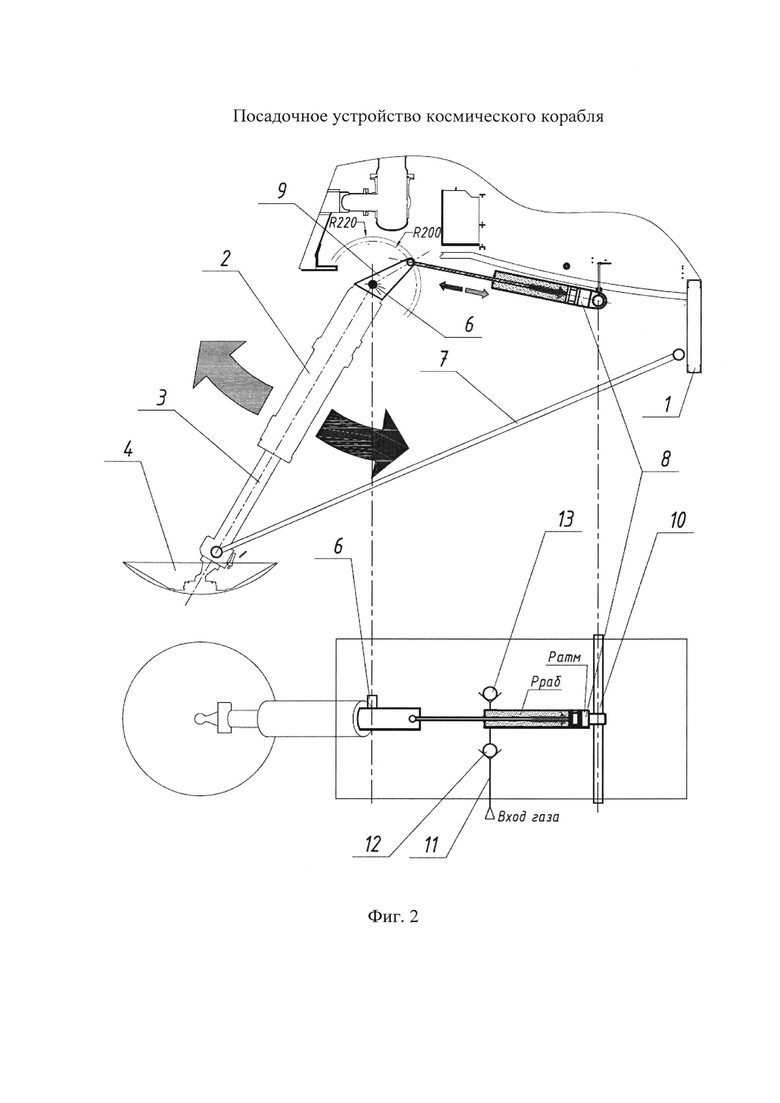
Осуществление заявленного технического решения поясняется с помощью чертежей посадочного устройства, где на фиг. 1 представлен чертеж посадочной опоры с раздвижным упором (прототип), на фиг. 2 - чертеж посадочной опоры в рабочем положении с рычагом и упором, выполненным в виде пневмоцилиндра, на фиг. 3-график изменения давления газа в полости пневмоцилиндра в зависимости от хода их штоков.
На чертежах обозначены:
1 - корпус космического корабля;
2 - главный цилиндр;
3 - телескопический шток;
4 - опорная тарель;
5 - раздвижной упор;
6 - датчик угла поворота;
7 - трос;
8 - пневмоцилиндр;
9 - рычаг центральной стойки;
10 - поперечная балка;
11 - магистраль подвода газа к пневмоцилиндру;
12 - обратный клапан;
13 - предохранительный клапан
На фиг. 1 представлена посадочная опора (прототип) в раскрытом положении. Посадочная опора включает в себя центральную стойку, состоящую из главного цилиндра 2, телескопического штока 3 и опорной тарели 4, раздвижной упор 5, который с одной стороны крепится к главному цилиндру 2, а с другой к поперечной балке, при этом на оси раздвижного упора установлен датчик угла поворота 6. Тросы 7 с помощью узла крепления тросов крепятся к телескопическому штоку 3, а другими концами к отсеку корпуса космического корабля 1.
На фиг. 2 представлена посадочная опора предлагаемого посадочного устройства в рабочем (раскрытом) положении. Посадочная опора включает в себя центральную стойку, состоящую из главного цилиндра 2, телескопического штока 3 и опорной тарели 4. Тросы 7 с помощью узла крепления тросов крепятся к телескопическому штоку 3, а другими концами к отсеку корпуса космического корабля 1. Пневмоцилиндр 8 своим штоком шарнирно соединен с рычагом 9 главного цилиндра в точке, расположенной на расстоянии, равному радиусу окружности R с центром на оси вращения центральной стойки, при этом корпус пневмоцилиндра 8 связан с поперечной балкой 10, закрепленной в нише силовой рамы космического корабля. Магистраль 11, связанная с пневмосистемой посадочного устройства, соединена с входом обратного клапана 12, при этом выход клапана 12 связан со штоковой полостью пневмоцилиндра 8. Обратный клапан 12 предназначен для отсечки штоковых полостей пневмоцилиндра 8 от подводящей магистрали 12 с целью ограничения сжимаемого объема газа при повышении давления внутри полости пневмоцилиндра. Вход предохранительного клапана 13 связан со штоковой полостью пневмоцилиндра, а его выход сообщен с атмосферой, предохранительный клапан предназначен для ограничения давления в полости пневмоцилиндра. Датчик угла поворота 6 расположен на оси вращения центральной стойки и предназначен для осуществления контроля по угловому положению посадочной опоры.
На фиг. 3 представлен график функции изменения давления в штоковой полости пневмоцилиндра в зависимости от хода h его штока, который определяется углом отклонения центральной стойки от рабочего положения в сторону центра космического корабля. Эта функция характеризуется следующими параметрами: начальное давление рО, кривая повышения давления по адиабатическому процессу, участок постоянного давления рК, определяемый настройкой предохранительного клапана 13, hК - ход штока пневмоцилиндра, соответствующий давлению срабатывания предохранительного клапана.
Рассмотрим работу посадочного устройства.
Считаем, что центральные стойки четырех посадочных опор переведены из исходного (сложенного) положения в рабочее положение.
Рабочее положение посадочной опоры характеризуется следующими факторами:
- телескопический шток 3 центральной стойки выдвинут, при этом поршень и шток главного цилиндра находятся в зацеплении;
- в результате открытия электропневмоклапана пневмосистемы сжатый газ из баллона по магистрали 11 через обратный клапан 12 подан в штоковую полость пневмоцилиндра 8;
- шток пневмоцилиндра втянут, при этом центральная стойка, связанная со штоком через рычаг 9, повернута на исходный угол относительно вертикальной оси космического корабля, тросы 7 натянуты.
При контакте центральной стойки с посадочной поверхностью начинает осуществляться гашение скоростей космического корабля за счет работы сотовых энергопоглотителей, находящихся под поршнем главного цилиндра центральной стойки. В случае, например, попадания опорной тарели на локальное препятствие центральная стойка начинает поворачиваться относительно своей оси вращения из рабочего положения в сторону центра космического корабля, при этом рычаг 9 воздействует на шток пневмоцилиндра в сторону его выдвижения. Давление газа, запертого в полостях пневмоцилиндров, начинает повышаться по адиабатическому закону (фиг. 3), что приводит к нарастанию усилия, препятствующему повороту центральной стойки к центру космического корабля. Повышение усилия сопротивления ограничено давлением срабатывания предохранительного клапана рК; при дальнейшем повороте центральной стойки это усилие остается постоянным.
Благодаря использованию в конструкции посадочной опоры пневмоцилиндра с обратным и предохранительным клапаном создается усилие сопротивления повороту центральной стойки, достаточное для прекращения дальнейшего наклона корпуса космического корабля относительно вертикали к посадочной поверхности, что гарантирует отсутствие контакта корпуса с поверхностью земли и его деформации. При аналогичных условиях посадки механический раздвижной упор или балка к которой он крепится в устройстве - прототипе могут быть разрушены, что может привести к «подлому» центральной стойки и контакту корпуса космического корабля с грунтом, деформации корпуса и, как следствие, к потере многоразовости космического корабля.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2675042C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2015 |
|
RU2621416C2 |
| СИСТЕМА РАСКРЫТИЯ ПОСАДОЧНЫХ ОПОР КОСМИЧЕСКОГО КОРАБЛЯ | 2019 |
|
RU2725004C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2012 |
|
RU2521451C2 |
| ПОСАДОЧНОЕ УСТРОЙСТВО С КРАШ-ОПОРАМИ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2580601C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| ПНЕВМОПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 2010 |
|
RU2447329C2 |
| ПНЕВМОПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 2013 |
|
RU2529988C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2546042C2 |


Изобретение относится к посадочным устройствам. Посадочное устройство космического корабля (КК) содержит посадочные опоры, каждая из которых включает центральную стойку, имеющую главный цилиндр с сотовым энергопоглотителем, и узел крепления к корпусу КК, телескопический шток и механизм выдвижения телескопического штока, опорную тарель, шарнирно связанную с телескопическим штоком, датчик угла поворота, датчик выдвижения штока, два троса и раздвижной упор, шток которого соединен с главным цилиндром, а корпус - с поперечной балкой. Поперечная балка закреплена в нише посадочной опоры. Главный цилиндр снабжен рычагом в плоскости вращения центральной стойки с противоположной стороны от телескопического штока. Раздвижной упор выполнен в виде пневмоцилиндра. Шток пневомоцилиндра шарнирно соединен с рычагом главного цилиндра. Вход обратного клапана связан с магистралью подвода сжатого газа из пневмосистемы, а выход связан со штоковой полостью пневмоцилиндра. Вход предохранительного клапана связан также со штоковой полостью пневмоцилиндра, а выход сообщен с атмосферой. На оси вращения центральной стойки установлен датчик угла поворота. Техническим результатом изобретения является повышение безопасности посадки КК на поверхность планеты со сложным рельефом. 3 ил.
Посадочное устройство космического корабля, содержащее посадочные опоры, каждая из которых включает центральную стойку, имеющую главный цилиндр с сотовым энергопоглотителем и узел крепления к корпусу, телескопический шток и механизм выдвижения телескопического штока, расположенный внутри него, опорную тарель, шарнирно связанную с телескопическим штоком, датчик угла поворота, датчик выдвижения штока, два троса и раздвижной упор, отличающееся тем, что главный цилиндр снабжен рычагом в плоскости вращения центральной стойки с противоположной стороны от телескопического штока, а раздвижной упор выполнен в виде пневмоцилиндра, шток которого шарнирно соединен с рычагом главного цилиндра в точке, расположенной на расстоянии, равном радиусу окружности с центром на оси вращения центральной стойки, при этом вход обратного клапана связан с магистралью подвода сжатого газа из пневмосистемы, а его выход связан со штоковой полостью пневмоцилиндра, причем вход предохранительного клапана связан также со штоковой полостью пневмоцилиндра, а его выход сообщен с атмосферой, при этом датчик угла поворота установлен на оси вращения центральной стойки.
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2015 |
|
RU2621416C2 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2012 |
|
RU2521451C2 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2546042C2 |
| ПОСАДОЧНОЕ УСТРОЙСТВО С КРАШ-ОПОРАМИ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2580601C1 |
| US 3181821 A1, 04.05.1965 | |||
| US 6227494 B1, 08.05.2001. | |||

