Изобретение относится к области машиностроения и может быть использовано в тех областях, где необходимо осуществить мягкую посадку объекта, например, в ракетно-космической технике при посадке возвращаемого (посадочного) аппарата пилотируемого космического корабля на Землю или другие планеты по вертикальной схеме.
Известно посадочное устройство аппарата Х-38 (см. материалы NASA Х-38 Landing Gear Development, Adalbert Wagner, 1998 г.), выполненного по классической схеме с тремя посадочными опорами: одной носовой и двумя основными опорами. Посадочные опоры выдвигаются через вырезы в корпусе и теплозащитном покрытии, открываемые пироустройствами непосредственно перед приземлением.
Раскрытие посадочных опор начинается с момента срабатывания пироустройства, фиксирующего опоры в убранном положении. После этого опора под действием сил гравитации совершает поворотное движение, затем при помощи пружинного механизма выдвижения телескопического штока взводится телескопический шток, и опора занимает рабочее положение. Касание поверхности осуществляется посадочной тарелью, шарнирно соединенной с телескопическим штоком и имеющей форму лыжи. Гашение энергии удара осуществляются трехступенчатыми разрушаемыми элементами, размещенными в главных цилиндрах стоек.
Известна также схема посадочного устройства, включающего четыре посадочных опоры, расположенные в корпусе космического корабля азимутально через 90° - ближайший аналог (прототип), описанный в патенте на изобретение RU №2521451 С2, 27.01.1998, МПК: F42B 15/36.
Посадочная опора включает в себя центральную стойку, состоящую из главного цилиндра с сотовым энергопоглотителем, телескопического штока, расположенного внутри него пневматического механизма выдвижения телескопического штока и снабженную узлом крепления к корпусу космического корабля, а также опорную тарель в форме сферического сегмента, шарнирно связанную с телескопическим штоком, откидную раму, прикрепляемую к корпусу космического корабля при помощи кронштейнов, два подкоса, связанных с откидной рамой, устройство фиксации главного цилиндра в убранном положении, пневмопривод вращательного типа и датчик угла поворота, установленные на оси вращения откидной рамы.
Одним из факторов, определяющих устойчивость космического корабля к опрокидыванию, является опорная база, которая характеризуется расстоянием между вершинами опорных тарелей двух диагонально расположенных посадочных опор, находящихся в рабочем положении. Опорная база находится в зависимости от угла между осью центральной стойки посадочной опоры и вертикальной осью корпуса космического корабля (угол установки).
Недостатком посадочного устройства-прототипа является невозможность обеспечения оптимального угла установки центральных стоек посадочных опор в корпусе космического корабля из-за ограничения возможностей компоновки посадочной опоры с откидной рамой и подкосами, что сужает зону его устойчивости к опрокидыванию, и, как следствие, не обеспечивается достаточная безопасность экипажа космического корабля при нештатных ситуациях (например, при отказе тормозящих посадочных двигателей).
Задачей предлагаемого посадочного устройства является повышение безопасности посадки космического корабля сегментно-конической формы.
Техническим результатом настоящего изобретения является увеличение зоны устойчивости к опрокидыванию космического корабля при его посадке за счет увеличения угла установки посадочных опор в корпусе космического корабля, что позволяет увеличить его опорную базу.
Технический результат достигается за счет того, в посадочном устройстве космического корабля, содержащем посадочные опоры, каждая из которых включает в себя центральную стойку, имеющую главный цилиндр с сотовым энергопоглотителем и узел крепления к корпусу космического корабля, телескопический шток и механизм выдвижения телескопического штока, расположенный внутри него, опорную тарель, шарнирно связанную с телескопическим штоком, датчик угла поворота, датчик выдвижения штока, в отличие от известного, посадочная опора снабжена двумя тросами, при этом один конец троса соединен с телескопическим штоком со стороны опорной тарели, а второй конец троса закреплен в нише корпуса космического корабля, в котором размещена посадочная опора в исходном положении, а также введен раздвижной упор, шток которого соединен с главным цилиндром, а корпус - с поперечной балкой, закрепленной в нише, в которой размещена посадочная опора, а датчик угла поворота установлен на оси вращения раздвижного упора.
Таким образом, благодаря данному техническому решению достигается больший угол установки посадочных опор (по сравнению с посадочной опорой-прототипом) за счет использования тросов и применения пневматического раздвижного упора, выполняющего функции ограничителя возможного обратного движения центральной стойки, в результате обеспечивается большая опорная база космического корабля при посадке и повышается устойчивость его к опрокидыванию.
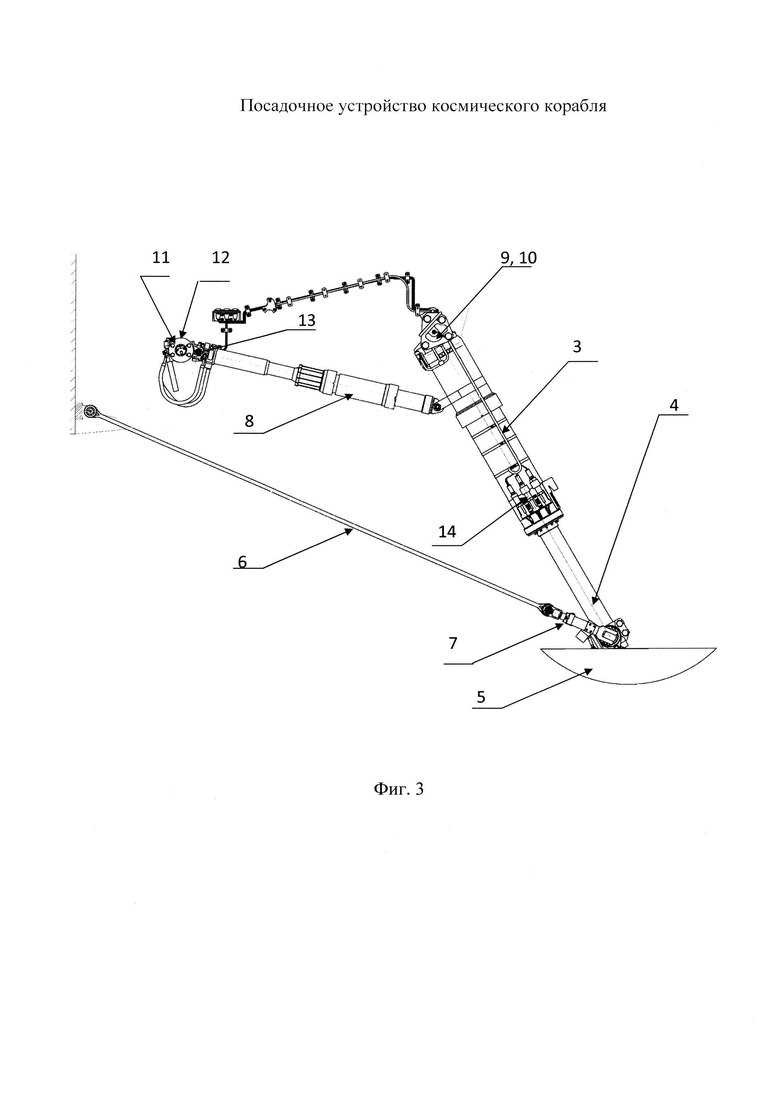
Осуществление заявленного технического решения поясняется с помощью чертежей посадочного устройства, где на фиг. 1 представлен общий вид корпуса космического корабля с посадочным устройством, имеющим четыре посадочных опоры с откидной рамой и подкосами (прототип); на фиг. 2 представлен общий вид корпуса космического корабля с четырьмя посадочными опорами с тросами и раздвижным упором; на фиг. 3 - чертеж посадочной опоры в рабочем положении.
На чертежах цифрами обозначены:
1 - корпус космического корабля;
2 - посадочная опора;
3 - главный цилиндр;
4 - телескопический шток;
5 - опорная тарель;
6 - тросы;
7 - узел крепления тросов к штоку;
8 - раздвижной упор;
9, 10 - кронштейны крепления центральной стойки;
11 - поперечная балка;
12 - дистанционно управляемый замок;
13 - датчик поворота раздвижного упора;
14 - датчик выдвижения штока.
На фиг. 1 представлен общий вид посадочного устройства-прототипа, состоящего из четырех посадочных опор 2, показанных в рабочем положении и размещенных в четырех отсеках корпуса 1 космического корабля. Опорная база показана размером L.
На фиг. 2 представлен общий вид посадочного устройства, состоящего из четырех посадочных опор 2, показанных в рабочем положении и размещенных в четырех отсеках корпуса 1 космического корабля. Опорная база показана размером L.
На фиг. 3 представлена посадочная опора в раскрытом (рабочем) положении. Посадочная опора 2 размещается в нише силовой рамы, принадлежащей корпусу 1.
Центральная стойка включает в себя главный цилиндр 3, телескопический шток 4 и опорную тарель 5. Тросы 6 с помощью узла крепления тросов 7 крепятся к телескопическому штоку 4, а другими концами - к отсеку корпуса 1. Раздвижной упор 8 представляет собой механизм, состоящий из двух частей: пневматической в виде цилиндра со штоком и замковой в виде зубчатой поверхности с цанговым механизмом. Раздвижной упор 8 своим штоком связан с главным цилиндром 3, а корпусной (замковой) частью через серьгу связан с поперечной балкой 11, которая с помощью кронштейнов соединена с отсеком корпуса 1. На оси раздвижного упора 8 со стороны замковой части расположен датчик угла поворота раздвижного упора 13 (в отличие от прототипа, в котором он был размещен на откидной раме). Центральная стойка с помощью кронштейнов 9 и 10 также соединена с отсеком корпуса 1. На поперечной балке 11 расположен дистанционно управляемый замок 12, который предназначен для удержания посадочной опоры 2 в убранном положении. На корпусе главного цилиндра 3 расположен датчик выдвижения штока 14, предназначенный для формирования сигнала в систему управления о выдвижении штока.
Рассмотрим работу посадочного устройства.
При подаче команды в виде давления сжатого газа на дистанционно управляемый замок 12 происходит его срабатывание, в результате чего посадочная опора 2 отсоединяется от поперечной балки 11 и начинает поворачиваться под действием сил гравитации относительно кронштейнов 9, 10 крепления главного цилиндра 3 к корпусу 1 космического корабля. В процессе поворота центральной стойки начинает поворачиваться раздвижной упор 8 относительно кронштейна, установленного на поперечной балке 11, при этом после отклонения оси раздвижного упора на определенный угол, например, 19° срабатывает соединенный с ним датчик поворота упора раздвижного 13. По сигналу с датчика поворота упора раздвижного 13 система управления формирует сигнал на выдвижение телескопического штока 4, например, с помощью давления сжатого газа от источника пневмопитания. После выдвижения штока 4 и фиксации его относительно цилиндра 3 с помощью внутреннего замка (на фиг. 3 не показан) происходит срабатывание датчика 14. По сигналу с датчика 14 система управления формирует команду для подачи сжатого газа в полость цилиндра раздвижного упора, шток раздвижного упора выдвигается и создает усилие на центральную стойку, происходит ее дополнительный поворот, что приводит к натяжению тросов 6. При достижении определенного хода шток устанавливается на зубчатую поверхность, благодаря наличию зубьев на зубчатой поверхности и цангового механизма в конструкции раздвижного упора образуется жесткая связь между штоком и корпусом раздвижного упора.
В процессе посадки космического корабля, при ударе опорной тарели 5 о грунт, усилие удара через телескопический шток 4 передается на главный цилиндр 3 и корпус 1, при этом тросы 6 работают на растяжение, а раздвижной упор 8 на сжатие, обеспечивая жесткость конструкции всей посадочной опоры.
Угол установки центральной стойки посадочной опоры благодаря замене откидной рамы и подкосов на тросы и раздвижной упор увеличивается с 19 до 30°, что приводит к увеличению опорной базы L космического корабля с 4800 до 5400 мм. В свою очередь это почти в 2,5 раза увеличивает зону устойчивости космического корабля к опрокидыванию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2675042C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2665154C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2012 |
|
RU2521451C2 |
| СИСТЕМА РАСКРЫТИЯ ПОСАДОЧНЫХ ОПОР КОСМИЧЕСКОГО КОРАБЛЯ | 2019 |
|
RU2725004C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО С КРАШ-ОПОРАМИ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2580601C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2546042C2 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| Космический аппарат для доставки полезного груза на космическое тело с малым гравитационным полем | 2020 |
|
RU2758656C1 |
| МНОГОЦЕЛЕВАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ РАКЕТНАЯ СИСТЕМА | 2022 |
|
RU2791754C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |



Изобретение относится к области машиностроения, где необходимо осуществить мягкую посадку объекта с помощью посадочного устройства по вертикальной схеме. Посадочное устройство содержит посадочные опоры с центральными стойками, содержащими главный цилиндр с сотовым энергопоглотителем и узел крепления к корпусу космического корабля, телескопический шток с механизмом выдвижения, шарнирно связанную с телескопическим штоком опорную тарель. Посадочная опора снабжена тросами из высокомодульного материала. Пневматический раздвижной упор штоком соединен с главным цилиндром, а корпусом – с поперечной балкой, закрепленной в нише посадочной опоры. Техническим результатом изобретения является увеличение области устойчивости к опрокидыванию космического корабля при его посадке. 3 ил.
Посадочное устройство космического корабля, содержащее посадочные опоры, каждая из которых включает в себя центральную стойку, имеющую главный цилиндр с сотовым энергопоглотителем и узел крепления к корпусу космического корабля, телескопический шток и механизм выдвижения телескопического штока, расположенный внутри него, опорную тарель, шарнирно связанную с телескопическим штоком, датчик угла поворота, датчик выдвижения штока, отличающийся тем, что в нем посадочная опора снабжена двумя тросами, при этом один конец троса соединен с телескопическим штоком со стороны опорной тарели, а второй конец троса закреплен в нише корпуса космического корабля, в котором размещена посадочная опора в исходном положении, а также введен раздвижной упор, шток которого соединен с главным цилиндром, а корпус - с поперечной балкой, закрепленной в нише, в которой размещена посадочная опора, а датчик угла поворота установлен на оси вращения раздвижного упора.
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО КОРАБЛЯ | 2012 |
|
RU2521451C2 |
| ПОСАДОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2546042C2 |
| US 3191316 A1, 29.06.1965. | |||

