Изобретение относится к винтовым конвейерам, предназначенным для транспортировки сыпучих грузов.
Известно устройство (Желтов В.П. Рекомендации по расчету и конструированию винтовых и спирально-винтовых конвейеров для сыпучих материалов. Казань, «ВНИИ». 1977, 54 с.) - винтовой конвейер, рабочим органом которого являются три вращающиеся проволочные спирали, вставленные одна в другую, две из которых вращаются в одном направлении, а третья, средняя, в противоположном. Данное устройство позволяет перемещать груз по криволинейной траектории и имеет небольшую производительность вследствие небольшого диаметра проволоки, не более 5 миллиметров, что вызвано увеличением изгибной жесткости проволоки, которая пропорциональна диаметру проволоки в 4-й степени, кроме того, увеличение изгибной жесткости приводит к ускоренному износу рукава и к увеличению сопротивления перемещаемого груза, кроме того, устройство имеет низкую надежность, обрыв проволочной спирали приводит к отказу винтового конвейера.
Известен винтовой конвейер с гибким винтом, взятый за прототип (патент РФ №2505470, опубл. 27.01.2014, МПК B65G 33/16, B65G 33/26), содержащий привод, гибкий винт, выполненный в виде трех коаксиально расположенных спирально изогнутых стержней, причем средний стержень выполнен в виде круглой пряди каната свивки одного направления, а два других - в виде круглых прядей каната свивки противоположного направления. Недостатком данного устройства является недостаточная производительность.
Изобретение направлено на повышение производительности винтового конвейера.
Техническим результатом является увеличение зачерпывающей способности за счет того, что большая ось поперечного сечения трехгранной пряди, расположенной в диаметральной плоскости желоба больше диаметра круглой пряди, при одинаковой изгибной жесткости.
Это достигается за счет того, что винтовой конвейер с гибким рабочим органом, содержащий привод, цилиндрический желоб с расположенным в нем гибким винтом, выполненным в виде трех коаксиально расположенных спирально изогнутых стержней, причем средний стержень выполнен в виде трехгранной пряди каната правой двойной односторонней свивки, а два других в виде трехгранной пряди каната двойной односторонней левой свивки, причем большая ось поперечного сечения трех трехгранных прядей расположена в диаметральной плоскости желоба винтового конвейера.
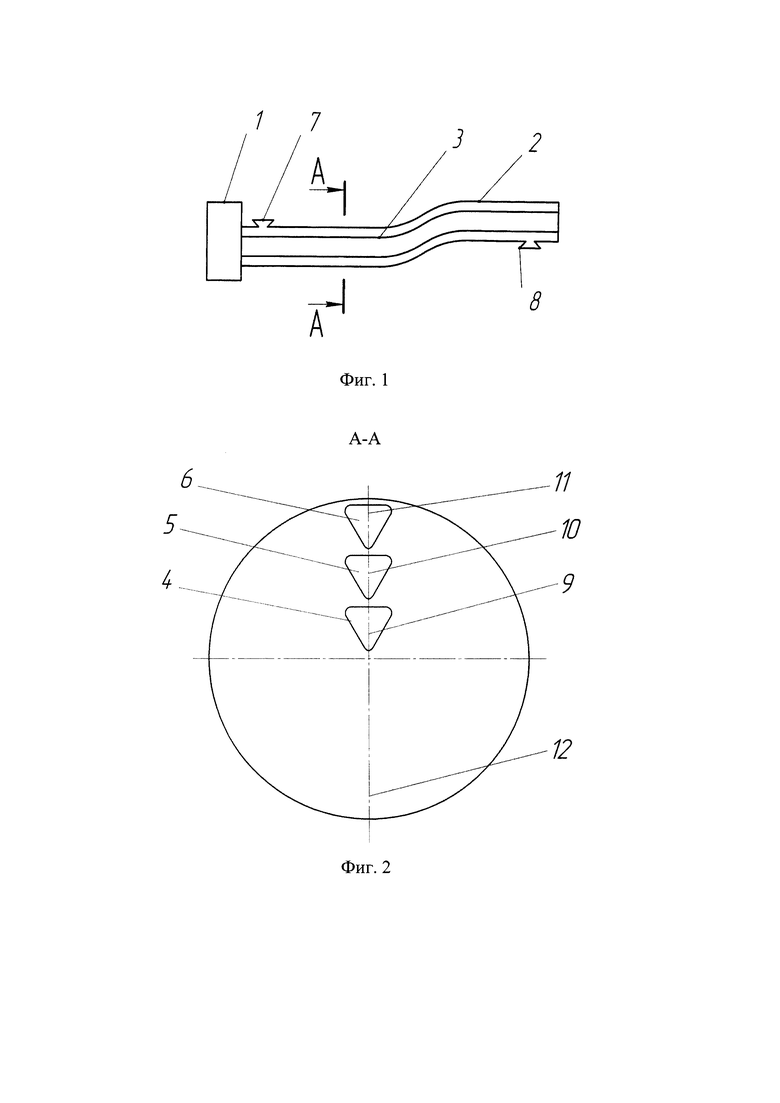
На фиг. 1 изображен общий вид винтового конвейера с гибким рабочим органом.
На фиг. 2 - разрез А-А на фигуре 1.
Винтовой конвейер с гибким рабочим органом содержит привод 1, цилиндрический желоб 2 с расположенным в нем гибким винтом 3. Гибкий винт 3 состоит из трех коаксиально расположенных спирально изогнутых стержней 4, 5 и 6, причем средний стержень 5 выполнен в виде трехгранной пряди каната правой двойной односторонней свивки, а два других 4 и 6 - в виде трехгранной пряди каната двойной односторонней левой свивки. Для приведения во вращение гибкого винта служит привод 1. Насыпной груз (условно не показан) подается в цилиндрический желоб 2 через загрузочный люк 7. Разгрузка из цилиндрического желоба 2 производится через разгрузочный люк 8. Причем большие оси 9, 10 и 11, проходящие через одну из трех вершин каждой из трехгранных прядей 4, 5 и 6 обращены к оси вращения гибкого винта 3 и расположены в диаметральной плоскости 12 цилиндрического желоба 2.
Устройство работает следующим образом: включается привод 1, и соответственно в противоположных направлениях начинают вращаться изогнутые стержни 4, 5 и 6. Поданный через загрузочный люк 7 насыпной груз перемещается по цилиндрическому желобу 2 и выгружается через разгрузочный люк 8. Благодаря тому, что средний стержень 5 трехгранной пряди каната правой двойной односторонней свивки, а два других крайних 4 и 6 - трехгранной пряди каната правой двойной односторонней свивки, происходит перелопачивание и движение груза в одну сторону.
За счет того, что высота трехгранной пряди на 10% больше диаметра круглой пряди при одинаковой изгибной жесткости и большая ось поперечного сечения трехгранных прядей расположена в диаметральной плоскости 12, увеличивается зачерпывающая способность рабочего органа и соответственно производительность винтового конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ КОНВЕЙЕР С ГИБКИМ РАБОЧИМ ОРГАНОМ | 2015 |
|
RU2581111C1 |
| Винтовой конвейер с гибким рабочим органом для транспортировки сыпучих грузов | 2019 |
|
RU2725364C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2015 |
|
RU2598026C1 |
| Винтовой конвейер с гибким рабочим органом | 2016 |
|
RU2629733C1 |
| Винтовой конвейер с гибким рабочим органом | 2017 |
|
RU2658217C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2012 |
|
RU2505470C2 |
| ВИНТОВОЙ КОНВЕЙЕР | 2012 |
|
RU2491223C1 |
| ВИНТОВОЙ КОНВЕЙЕР С ГИБКИМ ВИНТОМ | 2009 |
|
RU2397131C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2015 |
|
RU2580606C1 |
| МЕЛЬНИЦА ДЛЯ ПОМОЛА ЗЕРНА | 2012 |
|
RU2507005C1 |
Винтовой конвейер с гибким рабочим органом содержит привод (1) и цилиндрический желоб (2), с расположенным в нем гибким винтом (3), состоящим из трех коаксиально расположенных спирально изогнутых стержней (4, 5, 6). Один из стержней выполнен в виде трехгранной пряди каната двойной правой односторонней свивки, а два других крайних в виде трехгранной пряди каната двойной односторонней левой свивки. Большие оси (9, 10, 11), проходящие через одну из трех вершин каждой из трехгранных прядей, обращены к оси вращения гибкого винта и расположены в диаметральной плоскости (12) цилиндрического желоба. Повышаются надежность и производительность винтового конвейера. 2 ил.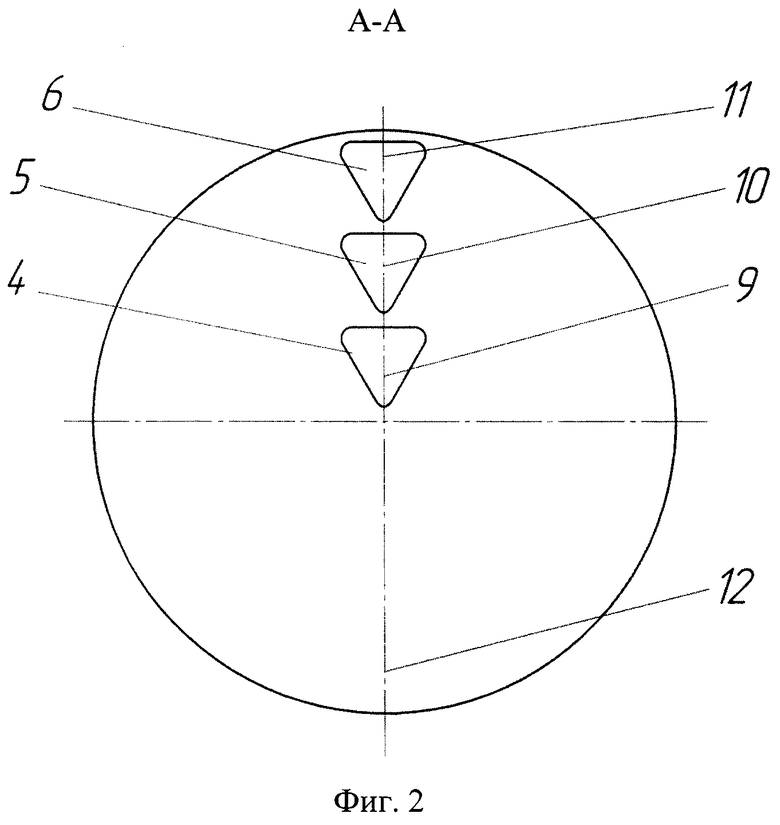
Винтовой конвейер с гибким рабочим органом, содержащий привод, цилиндрический желоб с расположенным в нем гибким винтом, выполненным из коаксиально расположенных спирально изогнутых стержней, отличающийся тем, что средний стержень выполнен в виде трехгранной пряди каната двойной правой односторонней свивки, а два других крайних в виде трехгранной пряди каната двойной односторонней левой свивки, причем большие оси, проходящие через одну из трех вершин каждой из трехгранных прядей, расположены в диаметральной плоскости цилиндрического желоба.
| ВИНТОВОЙ КОНВЕЙЕР С ГИБКИМ РАБОЧИМ ОРГАНОМ | 2015 |
|
RU2581111C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2015 |
|
RU2598026C1 |
| US 10189648 B2, 29.01.2019. | |||

