Изобретение относится к винтовым конвейерам, предназначенным для транспортировки сыпучих грузов.
Известно устройство (а.с. СССР №1333595. МКИ В30В 9/14, опубл. 30.08.87) - винтовой конвейер, который содержит смонтированный в трубе направляющими приводной шнековый вал с винтовой лопастью.
Данное устройство предназначено для перемещения сыпучего груза по прямолинейной траектории. Перемещение сыпучего груза по изменяемой в пространстве криволинейной траектории таким конвейером осуществлять невозможно. Кроме того, нарушается надежность работы конвейера при перемещении сыпучего материала по сложной ломаной траектории, так как у промежуточных подшипников образуются зазоры.
Известно устройство (Желтов В.П. Рекомендации по расчету и конструированию винтовых и спирально-винтовых конвейеров для сыпучих материалов. Казань «ВНИИ». 1977, 54 с.) - винтовой конвейер, рабочим органом которого являются две вращающиеся проволочные спирали, вставленные одна в другую и имеющие противоположное направление вращения. Данное устройство позволяет перемещать груз по криволинейной траектории и имеет небольшую производительность из-за ограничения по диаметру проволок, их величина ограничивается существенным увеличением изгибной жесткости проволоки, которая пропорциональна диаметру проволок в 4-й степени, кроме того, увеличение изгибной жесткости проволоки приводит к ускоренному износу рукава и к увеличению сопротивления перемещаемого груза.
Известен винтовой конвейер с гибким винтом, взятый за прототип (патент РФ №2397131, МПК B65G 13/16, МПК B65G 13/26, опубл. 20.08.2010), содержащий гибкий винт, выполненный в виде двух коаксиально расположенных спирально изогнутых стержней, причем один из стержней выполнен в виде круглой пряди каната левой свивки, а другой - в виде круглой пряди каната правой свивки. Недостатком данного устройства является низкая производительность.
Задачей изобретения является повышение производительности винтового конвейера, это достигается за счет того, что винтовой конвейер с гибким рабочим органом содержит привод и вмонтированный в цилиндрическом желобе винт, выполненный в виде двух коаксиально расположенных спирально изогнутых стержней, причем наружный стержень выполнен в виде овальной пряди каната двойной правой односторонней свивки, а внутренний - в виде круглой пряди каната двойной левой односторонней свивки, причем большая ось поперечного сечения овальной пряди и ось круглой пряди расположены в диаметральной плоскости цилиндрического желоба винтового конвейера, а зазор между двумя коаксиально расположенными стержнями больше наибольшего размера гранулы транспортируемого груза.
Техническим результатом является увеличение зачерпывающей способности за счет того, что большая ось поперечного сечения овальной пряди, расположенный в диаметральной плоскости желоба больше диаметра круглой пряди, при одинаковой изгибной жесткости.
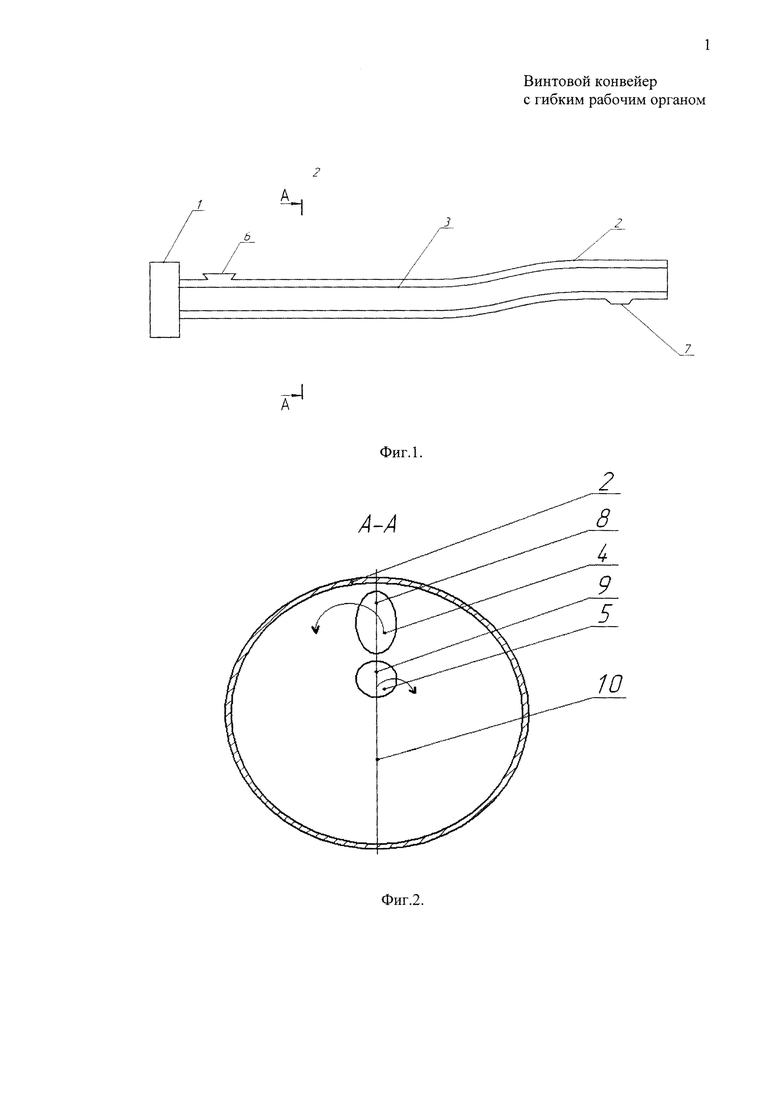
На фиг. 1 изображен общий вид винтового конвейера для транспортировки сыпучих грузов: на фиг. 2 - разрез А-А на фиг. 1.
Винтовой конвейер с гибким рабочим органом содержит привод 1, цилиндрический желоб 2 с расположенным в нем гибким винтом 3. Гибкий винт 3 состоит из двух коаксиально расположенных спирально изогнутых стержней 4 и 5, причем наружный стержень 4 выполнен в виде овальной пряди каната двойной правой односторонней свивки, а внутренний стержень 5 - в виде круглой пряди каната двойной левой односторонней свивки. Для приведения во вращение гибкого винта служит привод 1. Насыпной груз (условно не показан) подается в цилиндрический желоб 2 через загрузочный люк 6. Разгрузка из цилиндрического желоба 2 производится через разгрузочный люк 7. Причем большая ось 8 и диаметр 9 соответствующих прядей 4 и 5 расположены в диаметральной плоскости 10 цилиндрического желоба 2, проходящей вдоль основания винтового конвейера.
Устройство работает следующим образом. Ввключается привод 1, и соответственно в противоположных направлениях начинают вращаться изогнутые стержни 4, 5. Поданный через загрузочный люк 6 насыпной груз перемещается по цилиндрическому желобу 2 и выгружается через разгрузочный люк 7. Благодаря тому, что наружный стержень выполнен в виде овальной пряди двойной правой односторонней свивки, а внутренний - в виде круглой пряди двойной левой односторонней свивки, движение груза направленно в одну сторону. За счет того, что зазор между двумя коаксиально расположенными стержнями больше наибольшего размера гранулы транспортируемого груза, большая ось поперечного сечения овальной пряди и ось круглой пряди расположены в диаметральной плоскости 10, диаметр овальной пряди, расположенный в диаметральной плоскости желоба больше диаметра круглой пряди, при одинаковой изгибной жесткости, увеличивается зачерпывающая способность рабочего органа и соответственно производительность винтового конвейера, а так же благодаря такой конструкции происходит перемешивание груза по всему объему и соответственно способствует его однородности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ КОНВЕЙЕР | 2015 |
|
RU2598026C1 |
| Винтовой конвейер с гибким рабочим органом для транспортировки сыпучих грузов | 2019 |
|
RU2725364C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2012 |
|
RU2491223C1 |
| Винтовой конвейер с гибким рабочим органом | 2019 |
|
RU2725404C1 |
| Винтовой конвейер с гибким рабочим органом | 2017 |
|
RU2658217C1 |
| ВИНТОВОЙ КОНВЕЙЕР С ГИБКИМ РАБОЧИМ ОРГАНОМ | 2015 |
|
RU2581111C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2012 |
|
RU2505470C2 |
| ВИНТОВОЙ КОНВЕЙЕР С ГИБКИМ ВИНТОМ | 2009 |
|
RU2397131C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2015 |
|
RU2580606C1 |
| Винтовой конвейер для транспортировки сыпучих грузов | 2002 |
|
RU2222485C1 |
Винтовой конвейер с гибким рабочим органом содержит привод (1) и смонтированный в цилиндрическом желобе (2) гибкий винт (3), выполненный в виде двух коаксиально расположенных спирально изогнутых стержней (4, 5). Наружный стержень выполнен в виде овальной пряди каната двойной правой односторонней свивки, а внутренний - в виде круглой пряди каната двойной левой свивки. Большая ось (8) поперечного сечения овальной пряди и ось круглой пряди расположены в диаметральной плоскости (9) желоба винтового конвейера. Повышаются надежность и производительность винтового конвейера. 2 ил.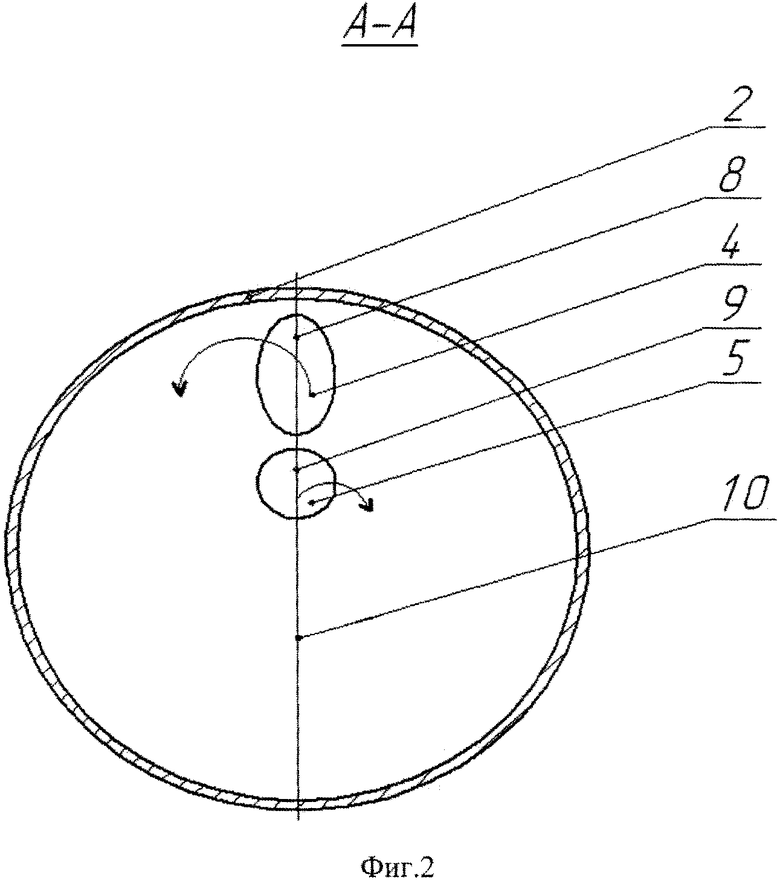
Винтовой конвейер с гибким рабочим органом, содержащий привод и вмонтированный в цилиндрическом желобе гибкий винт, выполненный в виде двух коаксиально расположенных спирально изогнутых стержней, отличающийся тем, что наружный стержень выполнен в виде овальной пряди каната двойной правой односторонней свивки, а внутренний - в виде круглой пряди каната двойной левой односторонней свивки, причем большая ось поперечного сечения овальной пряди больше оси круглой пряди, при одинаковой изгибной жесткости и обе оси расположены в диаметральной плоскости цилиндрического желоба, а зазор между двумя коаксиально расположенными стержнями больше наибольшего размера гранулы транспортируемого груза.
| ВИНТОВОЙ КОНВЕЙЕР С ГИБКИМ РАБОЧИМ ОРГАНОМ | 2015 |
|
RU2581111C1 |
| ВИНТОВОЙ КОНВЕЙЕР | 2012 |
|
RU2491223C1 |
| ВИНТОВОЙ КОНВЕЙЕР С ГИБКИМ ВИНТОМ | 2009 |
|
RU2397131C1 |

