Изобретение относится к области измерительной, приводной техники, механике, трибологии.
Известны способы возбуждения автоколебаний в электромеханических системах (ЭМС), где незатухающие механические колебания создаются применением обратных связей по положению, упругих свойств механических пружин и качающегося магнитного поля (1. Мирошниченко Г.П. Устройство для измерения момента инерции твердых тел. А.С. №139858. Опубл. в Б.И., 1961, №14; 2. Петров И.И., Мейстель A.M. Специальные режимы работы синхронного электропривода, - М.: Энергия, 1968, с. 20-25, 168-171; 3. Шваб И.А., Селезнев А.В. Измерение угловых ускорений. - М.: Машиностроение, 1983, с. 127-128)
Известные способы позволяют возбуждать механические автоколебания обратными связями (ОС), реализуемыми различными электрическими и механическими устройствами. При этом возникают технические трудности осуществления ОС, управления параметрами колебаний, снижается надежность из-за двигателей постоянного тока, а в случае асинхронных - и колебательный электромагнитный момент при низких частотах.
Следовательно, недостатками известных способов являются технические трудности реализации, ограничения по функциональным возможностям, по регулированию параметрами колебаний и недостаточная надежность.
Из известных технических решений наиболее близким к предполагаемому по достигаемому результату является способ на принципе положительной обратной связи (ПОС) в электромеханической системе на основе двухфазной синхронной машины с постоянными магнитами, в которой одна фаза статора подключена к источнику постоянного тока, а вторая фаза подключена к выходу усилителя, ко входу которого подключена дополнительная обмотка, ось которой геометрически совпадает с осью второй и выполняющей роль датчика ПОС (Копейкин А.И., Малафеев С.И. Определение моментов инерции с помощью автоколебательной электромеханической системы. Измерительная техника, 1994, №4. - с. 31-32).
При реализации известного способа возбуждаются механические автоколебания сигналом положительной обратной связи, снимаемым с дополнительной обмотки статора (датчика ПОС). Вместе с тем, в этом известном способе недоиспользуется синхронный двигатель (СД) по нагрузке и, соответственно, установленной мощности, ограничены функциональные возможности по применению и управлению параметрами автоколебаний.
Цель предполагаемого изобретения - расширение функциональных возможностей, диапазона частот автоколебаний, увеличение динамической мощности автоколебательного движения.
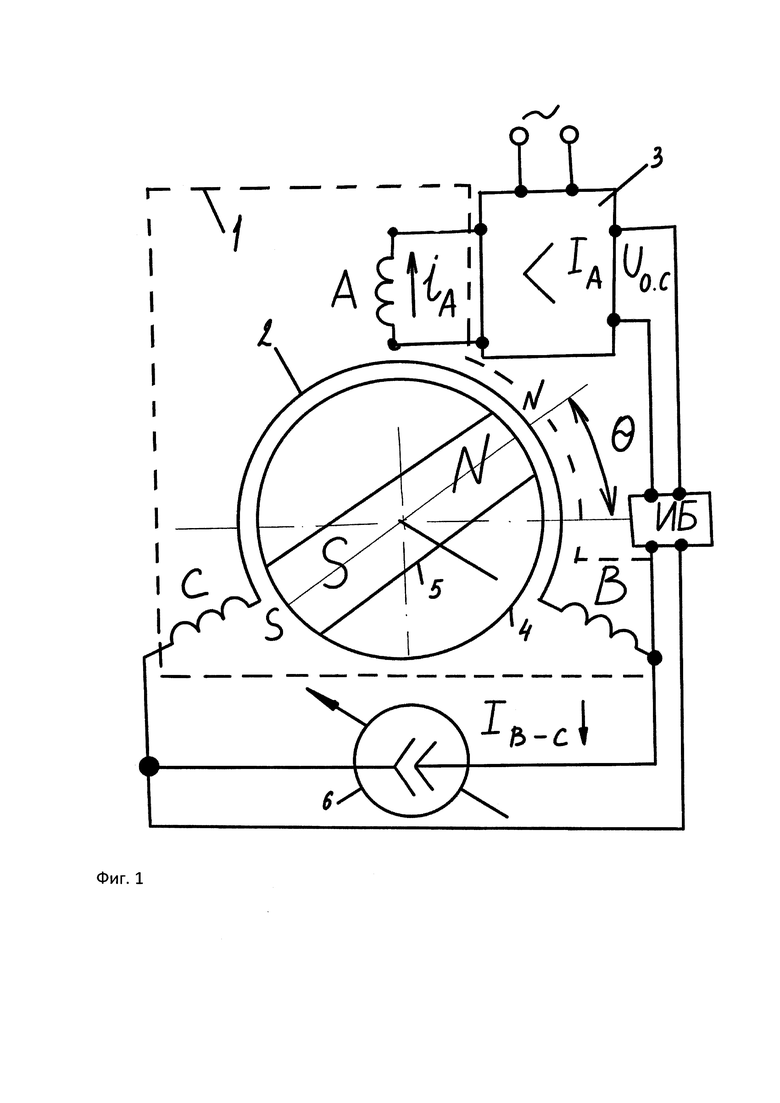
Поставленная цель достигается тем, что в известном способе получения автоколебаний в электромеханической системе с синхронным двигателем активного типа и двухфазной обмоткой на статоре, одна фаза статора подключена к источнику постоянного тока, а вторая фаза статора подключена к выходу усилителя, на вход которого подключена дополнительная обмотка, ось которой геометрически совпадает с осью второй фазы, выполняющей роль датчика ПОС, а в предполагаемом изобретении (фиг. 1) выполняют совмещение функций регулируемой электрической пружины и датчика ПОС на последовательном соединении фаз статора В и С трехфазного синхронного двигателя, питают выводы фаз В и С от регулируемого источника постоянного тока IBC, подключают третью фазу А статора на выход усилителя мощности 3, на вход которого подают сигнал положительной обратной связи через измерительный блок ИБ.
По сравнению с наиболее близким аналогичным техническим решением предлагаемый способ включается следующие новые операции:
- выбор для автогенератора СД с трехфазной обмоткой (фиг. 1) статора А, В, С и сдвиге фаз на 120 электрических градусов;
- увеличение жесткости электрической пружины последовательным соединением двух фаз В и С статора;
- совмещение функций регулируемой электрической пружины и бесконтактного датчика ПОС подключением выводов фаз В и С к регулируемому источнику постоянного тока;
- подключение третьей обмотки статора на выход усилителя переменного тока iA (усилителя мощности УМ) 3 с регулируемым коэффициентом усиления;
- подача на вход УМ сигнала с зажимом обмоток В и С через измерительный блок ИБ с управляемыми параметрами.
Следовательно, заявляемое техническое решение соответствует требованию "Новизна". При реализации предполагаемого способа расширяются функциональные возможности, диапазон регулирования по частоте автоколебаний, повышаются мощность колебательного движения, надежность в работе и упрощается техническое исполнение.
Следовательно, заявляемое техническое решение соответствует требованию "Положительный эффект". По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, измерений, контроля и диагностики, механики.
Операции:
- создание автогенератора на базе СД с трехфазной обмоткой статора А, В, С и ротором с постоянными магнитами;
- увеличение жесткости «электрической» пружины последовательным соединением двух фаз В и С;
- совмещение функций управляемой «электрической» пружины и бесконтактного датчика амплитуды колебаний подключением выводов фаз В и С к регулируемому источнику постоянного тока;
- подключение третьей фазы А статора на выход усилителя мощности 3 с регулируемым коэффициентом усиления;
- подача на вход УМ сигнала с выводов фаз В и С через измерительный блок (ИБ) с управляемыми параметрами
в известных способах аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «Существенные отличия».
Создание автоколебаний заявляемым способом существенно упрощает использование для этой цели серийных трехфазных статоров машин переменного тока с отработанной технологией. В этом случае растет выходная мощность колебательного движения из-за питания всех трех фаз статора допустимым по нагреву номинальным током и, соответственно, увеличивается использование установленной мощности синхронного двигателя. А последовательное соединение двух фаз статора 7 и 9 и подключение их к управляемому источнику постоянного тока расширяет возможности регулирования жесткости «электрической» пружины, увеличивая диапазон автоколебаний.
Кроме того, указанное выполнение ПОС по положению (амплитуде колебаний θm) бесконтактным датчиком повышает надежность и расширяет возможности по управлению частотой и амплитудой колебаний за счет измерительного блока изменением его параметров.
Сущность предполагаемого изобретения поясняется схемой (Фиг. 1) возбуждения автоколебаний, включающей: 1 - трехфазный синхронный двигатель со сдвигом фаз статора 2 А, В, С на 120 электрических градусов; активный ротор 4 с постоянными магнитами 5; регулируемый источник 3 переменного тока iA (усилитель мощности УМ); измерительный блок (ИБ) для формирования сигнала положительной обратной связи (напряжения Uoc), подаваемого на вход УМ и изменения параметров автоколебаний; регулируемый источник 6 постоянного тока IBC, выполняющего роль управляемой «электрической» пружины.
Адекватное состояние автоколебательной ЭМС, на основе которой реализуется заявляемый способ, достоинства, отличительные признаки объяснимы следующим.
В соответствии с теорией колебаний (Пановко Я.Г. Введение в теорию механических колебаний. Учебное пособие - 2-е изд., перераб. - М.: Наука, Главная ред.физико-математической литературы, 1980. - 272 с.) величина частоты периодических движений зависит от упругих (позиционных) сил системы (с. 110, формулы (5.5) и (5.6)). В заявляемом способе таким восстанавливающим воздействием является электромагнитный момент Mмsinθ (Малафеев С.И., Копейкин А.И., Малафеев С.С Анализ момента сопротивления при колебаниях в электромеханической системе. Т99 Трибология - машиностроению: Труды XII Междун. НТК, посвященной 80-летию ИМАШ РАН - М. - Ижевск: Институт компьютерных исследований, 2018. с. 308-312, формула 9). Максимальное значение Мм этого момента пропорционально геометрическим и магнитным параметрам ротора и магнитодвижущей силы (МДС) фазы В-С, т.е.

где К - коэффициент пропорциональности; Iв-с Wв-с - соответственно постоянный ток и число витков для фазы ВС, образованной последовательным соединением фаз В и С; Fвс - магнитодвижущая сила, создаваемая фазой ВС.
Так как число витков фазы ВС больше числа витков любой из фаз В или С, то, соответственно, при допустимом номинальном токе в фазах, Fвс возрастает. Это приводит к увеличению диапазона частот согласно известному выражению  J - момент инерции). Растет также мощность колебательного движения Рд=Мэ W, что расширяет функциональные возможности способа, увеличивает КПД при преобразовании энергии в динамическом режиме, соответственно повышая использование исполнительного двигателя (СД) по его установленной располагаемой мощности.
J - момент инерции). Растет также мощность колебательного движения Рд=Мэ W, что расширяет функциональные возможности способа, увеличивает КПД при преобразовании энергии в динамическом режиме, соответственно повышая использование исполнительного двигателя (СД) по его установленной располагаемой мощности.
Кроме того, предлагаемый способ реализации автоколебаний сигналом положительной обратной связи (ПОС) по положению обладает весьма широкими регулировочными, техническими достоинствами (в смысле простоты выполнения, надежности и монтажа). Электрический сигнал для самовозбуждения, как следует из заявляемого способа, снимается с выводов последовательно соединенных фаз В и С.Т.е он определяется алгебраической суммой Э.Д.С. каждой из фаз и соответственно равен

где Ψm - максимальное потокосцепление ротора с фазой статора при совпадении их осей; W - угловая частота автоколебаний; Кф - коэффициент формы сигнала, зависящий от геометрии воздушного зазора и определяемый экспериментальным путем; θm - амплитуда колебаний ротора.
Для повышения чувствительности, линейности преобразования угла поворота ротора в θ электрический сигнал, ослабления высших гармоник, управления параметрами автоколебаний в схему введен измерительный блок (ИБ).
Техническое использование ИБ оправдано возможностью корректировки сигнала, двойной частотой напряжения на его входе и электрической связью с выводами В и С без дополнительных датчиков.
В работе (Иванов - Смоленский В.А. Электрические машины: Учебник для вузов. - М.: Энергия, 1980. - с. 190-193) доказано, что для получения однонаправленного преобразования энергии в машине переменного тока с двумя обмотками необходимо, чтобы сумма или разность угловых частот токов в обмотках равнялась угловой частоте изменения взаимной индуктивности между обмотками. Данный вывод находится в полном соответствии с уравнением (2), ибо только в таком случае за счет среднего электромагнитного момента, формируемого токами фаз В-С и А, создается колебательное движение ротора. Это также подтверждается теоретическими исследованиями физики колебательных процессов, результаты которых изложены в упомянутой выше статье (Малафеев С.И., Копейкин А.И., Малафеев С.С Анализ момента сопротивления при колебаниях в электромеханической системе. Т99 Трибология - машиностроению: Труды XII Междун. НТК, посвященной 80-летию ИМАШ РАН - М. - Ижевск: Институт компьютерных исследований, 2018. с. 308-312)
Кроме того, ПОС осуществляется только электрическим путем, не используя никаких дополнительных измерительных устройств, а функции преобразования сигнала ПОС и управления параметрами автоколебаний возлагаются на измерительный электронный блок ИБ. Это существенно упрощает техническое исполнение, повышает надежность аппаратных средств реализации заявляемого способа.
Следовательно, бездатчиковое осуществление положительной обратной связи только последовательным соединением двух фаз В и С, применение ИБ для коррекции электрического сигнала дает широкие возможности управления параметрами автоколебаний, а также использование для электромеханических преобразований энергии всех трех фаз синхронного двигателя при указанных схемах их питания от силовых источников, обеспечивают достижение поставленной цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНЕРАТОР МЕХАНИЧЕСКИХ АВТОКОЛЕБАНИЙ | 2022 |
|
RU2793608C1 |
| Способ управления синхронным двигателем в режиме колебаний | 2019 |
|
RU2706340C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1992 |
|
RU2050687C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ХАРАКТЕРИСТИКИ ТРЕНИЯ | 2022 |
|
RU2789985C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПОДШИПНИКОВ | 2005 |
|
RU2284019C1 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ ТВЕРДОГО ТЕЛА | 1991 |
|
RU2009455C1 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПАР ТРЕНИЯ | 2008 |
|
RU2360231C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ АВТОСАМОСВАЛА | 2021 |
|
RU2757093C1 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 2000 |
|
RU2172936C1 |
Изобретение относится к области метрологии. Способ возбуждения механических автоколебаний в электромеханической системе с синхронным двигателем активного типа, заключается в том, что одну из фаз двигателя, выполняющую роль электрической пружины, подключают к источнику постоянного тока, другую фазу соединяют с усилителем. При этом выполняют совмещение функций регулируемой электрической пружины и датчика положительной обратной связи (ПОС) на последовательном соединении фаз В и С статора трехфазного синхронного двигателя со сдвигом фаз на 120 градусов, питают выводы фаз В и С от регулируемого источника постоянного тока IBC, подключают третью фазу статора А на выход усилителя мощности, на вход которого подают сигнал положительной обратной связи через измерительный блок ИБ. Технический результат - расширение функциональных возможностей, диапазона частот автоколебаний, увеличение динамической мощности автоколебательного движения. 1 ил.
Способ возбуждения механических автоколебаний в электромеханической системе с синхронным двигателем активного типа, заключающийся в том, что одну из фаз двигателя, выполняющую роль электрической пружины, подключают к источнику постоянного тока, другую фазу соединяют с усилителем, отличающийся тем, что выполняют совмещение функций регулируемой электрической пружины и датчика положительной обратной связи (ПОС) на последовательном соединении фаз В и С статора трехфазного синхронного двигателя со сдвигом фаз на 120 градусов, питают выводы фаз В и С от регулируемого источника постоянного тока IBC, подключают третью фазу статора А на выход усилителя мощности, на вход которого подают сигнал положительной обратной связи через измерительный блок ИБ.
| Копейкин А.И | |||
| Исследование, моделирование и идентификация механических подсистем электроприводов: метод незатухающих колебаний | |||
| Диссертация, 2007 | |||
| Малафеев С.И | |||
| и др | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

