Предполагаемое изобретение относится к электромашиностроению, машиностроению, измерительной, испытательной техники, трибологии.
Известны способы управления синхронным двигателем в режиме колебаний, при которых в одну из обмоток подается регулируемый по частоте и амплитуде переменный ток, а во вторую - регулируемый постоянный. Управление параметрами колебаний осуществляется амплитудой и частотой переменного тока, а также величиной постоянного тока. (Копейкин А.И., Малафеев С.И., Лыков А.Ю. Синхронный колебательный электропривод. Проблемы конверсии, разработка и испытания приборных устройств. Материалы Междунар. науч.-техн. конф . - М.: Информ. техника, 1993. - с. 117-120 / Копейкин А.И., Малафеев С.И. Способ управления синхронным двигателем в режиме колебаний. - Патент РФ №2025890. - Опубл. в БИ, 1994, №24)
Известные способы позволяют управлять параметрами механических колебаний, но не указывают, как можно увеличить диапазон частот и использование установленной мощности выбранного исполнительного синхронного двигателя.
Следовательно, недостатками известных способов являются ограниченные функциональные возможности и снижение использования установленной мощности выбранного исполнительного синхронного двигателя.
Из известных технических решений наиболее близким к предлагаемому по достигаемому результату является способ управления, при котором в электрической машине переменного тока с трехфазной обмоткой на статоре регулируемый источник постоянного тока подключен к одной из обмоток статора, выход последовательно соединенных фазосдвигающего звена и усилителя подключен к другой обмотке статора, а ротор электрической машины выполнен активным. (Копейкин А.И., Малафеев С.И. Электропривод колебательного движения. Патент РФ №2050687. - Опубл. в БИ, 1995, №35).
При реализации известного способа увеличивается КПД электропривода, надежность за счет работы в резонансной области.
Вместе с тем при использовании этого известного способа ограничены диапазон частот колебаний и возможность увеличения мощности колебательного движения.
Недостатками известного способа являются ограниченные функциональные возможности и недостаточное использование установленной трехфазной машины по мощности колебательного движения.
Цель предполагаемого изобретения - расширение функциональных возможностей и повышение мощности колебательного движения синхронного двигателя.
Поставленная цель достигается тем, что в известном способе управления электрической машиной переменного тока с трехфазной обмоткой статора регулируемый источник постоянного тока подключен к одной из обмоток статора, выход последовательно соединенных фазосдвигающего звена и усилителя подключен к другой обмотке статора, при этом вход фазосдвигающего звена соединен с третьей обмоткой статора, а ротор электрической машины выполнен активным, а в предполагаемом изобретении регулируемый источник постоянного тока подключают на две последовательно соединенные обмотки статора и амперметр, третью обмотку статора подключают на выход регулируемого источника переменного тока, состоящего из маломощного задающего устройства (низкочастотного генератора электрических колебаний) и усилителя мощности, изменяют величину постоянного тока или частоту колебаний задающего устройства до значений, при которых будет минимум тока в третьей обмотке статора.
По сравнению с наиболее близким аналогичным техническим решением предполагаемый способ включает следующие новые операции:
- соединяют последовательно две обмотки статора и подключают их на выход регулируемого источника постоянного тока;
- выполняют источник регулируемого переменного тока в виде двух блоков: маломощного низкочастотного задающего генератора электрических колебаний и усилителя мощности;
- ведут постоянный контроль величины переменного тока измерительным устройством;
- поддерживают значение переменного тока в третьей обмотке на экстремальном (минимальном) уровне;
- регулируют величину постоянного тока в двух последовательно соединенных обмотках статора до получения минимума переменного тока в третьей обмотке статора;
- регулируют частоту на выходе задающего низкочастотного генератора 2 до минимума тока в обмотке 8;
- осуществляют комбинированное регулирование частоты на выходе ЗУ и величины постоянного тока в обмотках 7 и 9 до наступления минимума переменного тока в обмотке 8.
При реализации предполагаемого способа расширяются регулировочные и функциональные возможности, снижаются трудности технического исполнения, повышаются показатели надежности.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, электромашиностроения, электропривода.
Операции:
- последовательное соединение двух обмоток статора и подключение их к регулируемому источнику постоянного тока;
- контроль величины постоянного тока в последовательно соединенных обмотках;
- контроль величины переменного тока в третьей обмотке статора;
- регулирование постоянного тока в двух последовательно соединенных обмотках до получения минимума тока в третьей обмотке статора;
- установка максимального значения частоты механических колебаний постоянным током;
- двухканальное управление параметрами задающего устройства 2 (частотой) и величиной постоянного тока в обмотках 7 и 9 для достижения минимума тока в обмотке 8.
В известных способах аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
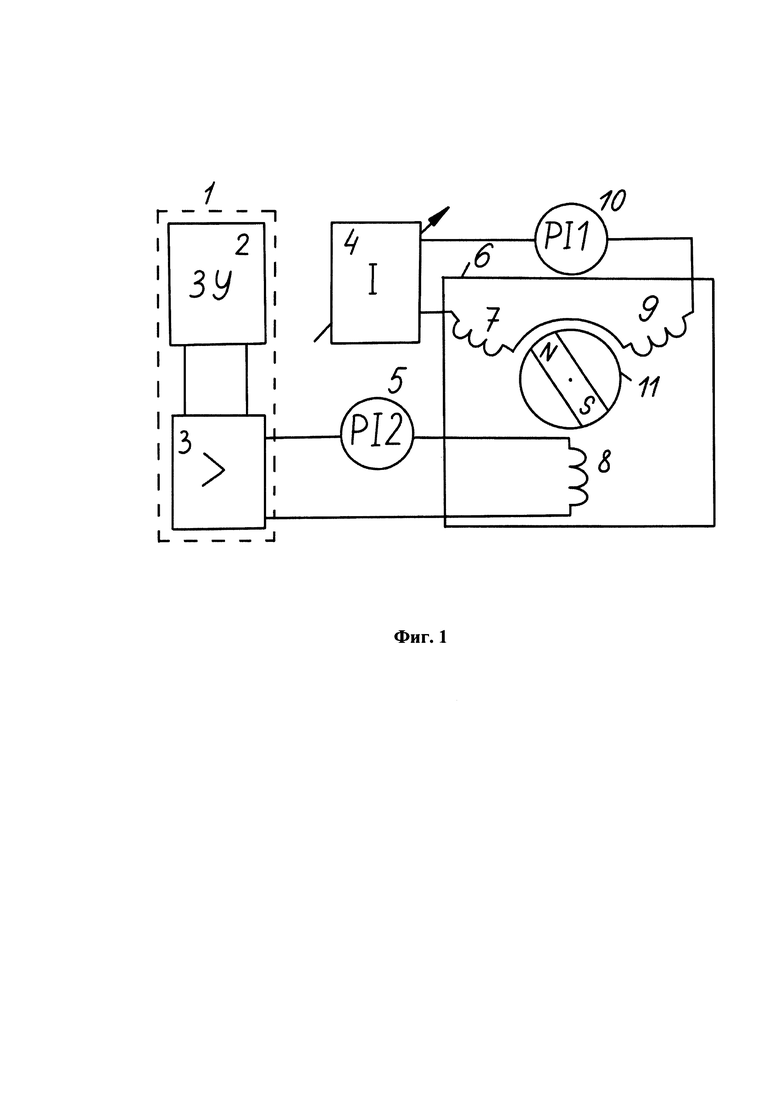
Предполагаемый способ показан на фиг.1, на которой:
1 - регулируемый генератор переменного тока, состоящий из задающего устройства (ЗУ) 2 (маломощный низкочастотный генератор электрических колебаний) и усилителя мощности (УМ) 3; 4 - регулируемый источник постоянного тока вместе с его измерителем (амперметром) 10; 5 - измеритель (амперметр) переменного тока на выходе УМ;. 6 - бесконтактную трехфазную машину (синхронный исполнительный двигатель (СИД) с активным ротором 11 (с постоянными магнитами); 7, 8, 9 - обмотки (фазы) статора СИД.
Обмотки двигателя 7 и 9, соединенные последовательно, подключают к регулируемому источнику постоянного тока 4 через амперметр 10, создавая эффект «электрической» пружины, т.е. двигатель приобретает упругие свойства. Обмотку 8 СИД через амперметр 5 подключают на выход усилителя мощности 3, на вход которого поступают электрические колебания необходимой величины и частоты с задающего устройства (генератора малой мощности).
Постоянные магниты ротора 11 создают магнитное поле в зазоре синхронного двигателя с рабочим потоком Фо. При подключении обмоток 7 и 9 к регулируемому источнику постоянного тока 4 создается магнитное поле статора. При взаимодействии этих полей ротор установится в нулевое (исходное) положение, соответствующее минимуму электромагнитной энергии.
Подключением обмотки статора 8 на выход усилителя мощности 3 создается управляющий магнитный поток, под действием которого ротор совершает колебания относительно исходной (нулевой) точки. При этом частота колебаний определяется частотой задающего устройства 2. Амплитуда колебаний θm зависит от параметров двигателя, величины переменного тока в обмотке 8 и жесткости «электрической» пружины. Для максимального использования установленной мощности синхронного двигателя при любых изменениях параметра двигателя, внешних воздействий, нагрузки необходима работа в резонансной области, где амплитуда колебаний ротора максимальна, а ток потребления по цепи управляющей обмотки 8 минимален. С целью выявления и контроля этого режима установлен измеритель 5 (амперметр) в цепи обмотки 8, минимум показаний которого достигается частотой электрического сигнала низкочастотного генератора колебаний (НГК), регулировкой жесткости «электрической» пружины величиной постоянного тока в обмотках 7 и 9 двигателя либо комбинированное регулирование по обоим каналам. Требуемые значения частоты ω и амплитуды колебаний задают НГК и по градуировочным зависимостям амплитуды от величины выходного напряжения Uвых. нгк при фиксированных жесткостях, которые предварительно снимаются на конкретной экспериментальной установке.
С целью аналитического подтверждения новизны и преимуществ способа перед известными техническими решениями рассмотрим физическую сущность управления механическими колебаниями.
Известно, что собственная частота ω угловых незатухающих колебаний систем с восстанавливающей силой определяется уравнением (Пановко Я.Г. Введение в теорию механических колебаний. - М.: Наука, Физматлит, 1980. - с. 26-27)

где С - обобщенный коэффициент жесткости,  - момент инерции колеблющейся механической части
- момент инерции колеблющейся механической части
Применительно к используемому в данном способе исполнительному синхронному двигателю (СД) формулу (1) следует интерпретировать как

где Сэ - электромагнитная жесткость СД; Мm - максимальный электромагнитный момент двигателя; Кф - коэффициент формы его угловой характеристики.
Из (2) следует, что диапазон частот, в котором можно применять заявляемый способ, зависит от величины Мm при известных других параметрах (Кф, ), определяемых конструкцией СД. В свою очередь из теории электромеханического преобразования энергии (Ивоботенко Б.А, Рубцов В.П., Садовский Л.А., Цаценкин В.К., Чиликин М.Г. Дискретный электропривод с шаговыми двигателями, под общ. Ред. М.Г. Чиликина - М., Энергия, 1971. - с. 56-58) известно, что

где Dp, Lp - диаметр и длина ротора; Вm - максимальная индукция, создаваемая ротором в зазоре; W7,9 - число витков, последовательно соединенных обмоток 7 и 9; I7,9 - постоянный ток в обмотках 7 и 9.
Следовательно, при допустимом по нагреву токе I7,9 максимальный электромагнитный момент Мm в заявляемом способе будет больше, нежели при питании постоянным током только одной обмотки, т.к. W7,9>W8 (W8 - число витков одной обмотки 8 статора).
Кроме того, обмотки 7 и 9 находятся в одинаковом температурном режиме, обтекаются одним и тем же постоянным током I7,9, т.е. равнозначны по вкладу в общую электромагнитную жесткость и соответственно в диапазон частот угловых колебаний и электромагнитное усилие.
Как показано в работе (Копейкин А.А. Исследование, моделирование и идентификация механических подсистем электроприводов: метод незатухающих колебаний. Диссертация на соискание ученой степени доктора технических наук, Владимир, 2007 - с. 175-178) наибольшее использование по мощности выбранного исполнительного СД достигается в резонансной области ввиду гармонического характера движения и где максимальная динамическая мощность, а также ее среднее значение соответственно равны

где W, f соответственно угловая частота и число механических колебаний в одну секунду, связанных известным соотношением W=2 πf; θm - амплитуда колебаний.
Из (4) следует, что при последовательном соединении обмоток статора 7 и 9 и подключении их на регулируемый источник постоянного тока ввиду возрастания электромагнитного момента Мm и W существенно увеличивается максимальная динамическая и средняя мощности, пропорциональные кубу частоты. А поскольку работа происходит в резонансной области, то достигается и большее использование (больший КПД) установленной мощности выбранного СД. А из-за создания «электрической» пружины двумя обмотками статора 7 и 9 увеличивается диапазон частот, в котором обеспечивается резонанс. Т.е. можно управлять резонансом по цепям постоянного и переменного тока при вариации различных воздействий на колебательную систему. Именно с этих позиций целесообразно использование регулируемого генератора переменного тока в виде двух блоков. В этом случае управление по частоте и амплитуде колебаний ведется маломощным низкочастотным генератором электрических сигналов, не затрагивая силовых цепей усилителя мощности УМ. Такое исполнение повышает надежность генератора переменного тока, упрощает его техническую реализацию из-за открытой архитектуры, т.е. модульности, и вместе с увеличением жесткости «электрической» пружины последовательным соединением обмоток 7 и 9, расширяет функциональные возможности способа. Следовательно, заявляемый способ обеспечивает достижение поставленной цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ возбуждения механических автоколебаний | 2019 |
|
RU2725897C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКИХ АВТОКОЛЕБАНИЙ | 2022 |
|
RU2793608C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ХАРАКТЕРИСТИКИ ТРЕНИЯ | 2022 |
|
RU2789985C1 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ ТВЕРДОГО ТЕЛА | 1991 |
|
RU2009455C1 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 2000 |
|
RU2172936C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПОДШИПНИКОВ | 2005 |
|
RU2284019C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1992 |
|
RU2050687C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПАР ТРЕНИЯ | 2008 |
|
RU2360231C1 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОЛЕБАНИЙ СИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2076439C1 |
Изобретение относится к области электротехники и может быть использовано в машиностроении, электромашиностроении, измерительной, испытательной технике, трибологии. Техническим результатом является расширение диапазона частот колебаний, увеличение динамической мощности в нагрузке, использование установленной мощности исполнительного СД питанием всех трех фаз силовым током от соответствующих регулируемых преобразователей, расширение функциональных и регулировочных возможностей. В способе управления трехфазным синхронным двигателем (СД) с ротором на постоянных магнитах применяют колебательную электромеханическую систему с двумя управляемыми каналами и обеспечивают различные практические реализации по созданию генераторов механических колебаний как регулируемых источников колебательного электромагнитного момента, усилия, мощности. Отличительными особенностями последних являются непрерывность электромагнитного момента, плавность реверса, что повышает надежность и безопасность соответствующих технических объектов. Кроме того, ввиду двухканального управления параметрами колебаний достижима работа в энергетически выгодной резонансной области, минимизируют потери и повышают КПД технических устройств. Указываются пути достижения резонансной области. 1 ил.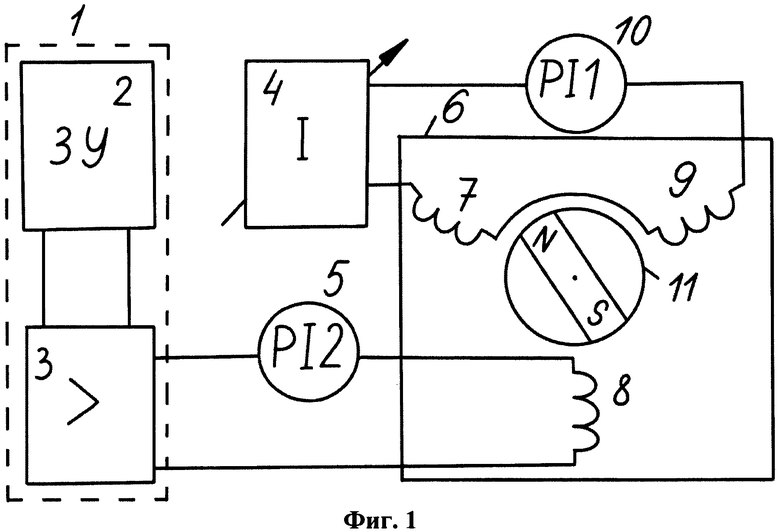
Способ управления синхронным двигателем в режиме колебаний, при котором регулируемый источник постоянного тока подключают к одной из обмоток статора, выход последовательно соединенных фазосдвигающего звена и усилителя подключают к другой обмотке статора, вход фазосдвигающего звена соединяют с третьей обмоткой статора, отличающийся тем, что регулируемый источник постоянного тока включают на две последовательно соединенные обмотки статора, третью обмотку статора подключают на выход регулируемого источника переменного тока, состоящего из задающего устройства и усилителя мощности, а энергетически выгодный режим достигают изменением величины постоянного тока или частоты задающего устройства до значений, при которых обеспечивают минимум тока в третьей обмотке.
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1992 |
|
RU2050687C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1992 |
|
RU2050687C1 |
| Электропривод колебательного движения | 1985 |
|
SU1307530A1 |
| JP 2000050659 A, 18.02.2000 | |||
| US 9000691 B2, 07.04.2015 | |||
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТОПЛИВНОЙ АППАРАТУРЫ | 1991 |
|
RU2054573C1 |
| CN 104113267 B, 11.08.2017. | |||

