ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится в целом к вентиляторным соплам с изменяемым сечением и, более конкретно, к управлению площадью сечения вентиляторных сопел с изменяемым сечением.
УРОВЕНЬ ТЕХНИКИ
[0002] Турбовентиляторные двигатели производят два потока выходящих газов: поток внутреннего контура двигателя и вентиляторный поток. Поток внутреннего контура двигателя выпускается из сопла внутреннего контура двигателя после прохода через внутренний контур двигателя. Вентиляторный поток проходит через кольцевой проход, образованный гондолой или обтекателем, окружающим внутренний контур двигателя и вентиляторный канал. Площади поперечного сечения, через которые проходят эти два потока, могут быть оптимизированы для конкретных рабочих режимов, таких как взлет, набор высоты, крейсерский режим и т.п. Вентиляторные сопла с изменяемым сечением, которые включают в себя подвижные створки, используются для увеличения или уменьшения площади сечения вентиляторного потока и, таким образом, увеличения или уменьшения скорости истечения соответственно.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] В соответствии с одним аспектом раскрыта система управления вентиляторным соплом с изменяемым сечением (variable area fan nozzle, VAFN). Вентиляторное сопло с изменяемым сечением может иметь множество створок и может использоваться с газотурбинным двигателем. Система управления может включать в себя первичную систему, выполненную с возможностью сбора первичных данных, характеризующих рабочий режим вентиляторного сопла с изменяемым сечением, вторичную систему, выполненную с возможностью сбора вторичных данных, характеризующих текущий рабочий режим газотурбинного двигателя, и модуль управления, имеющий оперативную связь с первичной системой и вторичной системой. Модуль управления может быть выполнен с возможностью: определения площади сечения вентиляторного сопла с изменяемым сечением на основании по меньшей мере частично первичных данных, корректирования полученной определением площади сечения сопла на основании вторичных данных и расположения указанного множества створок согласно откорректированной площади сечения сопла.
[0004] В одном варианте реализации вторичные данные могут включать в себя данные, характеризующие противодавление газотурбинного двигателя.
[0005] Еще в одном варианте реализации вторичная система может включать в себя по меньшей мере один датчик давления, выполненный с возможностью определения противодавления газотурбинного двигателя.
[0006] Еще в одном варианте реализации указанный по меньшей мере один датчик давления может быть расположен возле заднего конца обтекателя внутреннего контура газотурбинного двигателя.
[0007] Еще в одном варианте реализации вторичные данные могут включать в себя данные, характеризующие механическое напряжение лопасти вентилятора газотурбинного двигателя.
[0008] Еще в одном варианте реализации вторичная система может включать в себя по меньшей мере один тензодатчик, выполненный с возможностью определения механического напряжения лопасти вентилятора газотурбинного двигателя.
[0009] Еще в одном варианте реализации указанный по меньшей мере один тензодатчик может включать в себя волоконно-оптический тензодатчик, расположенный на лопасти вентилятора газотурбинного двигателя.
[0010] Еще в одном варианте реализации модуль управления также может быть выполнен с возможностью определения переходного режима работы газотурбинного двигателя на основании вторичных данных.
[0011] Еще в одном варианте реализации модуль управления также может быть выполнен с возможностью отправки сигнала для предупреждения членов экипажа летательного аппарата о переходном режиме работы.
[0012] Еще в одном варианте реализации модуль управления также может быть выполнен с возможностью перемещения указанного множества створок в положение безотказной работы, когда вторичные данные указывают на переходный режим работы.
[0013] В соответствии еще с одним аспектом раскрыт летательный аппарат. Летательный аппарат может включать в себя газотурбинный двигатель, вентиляторное сопло с изменяемым сечением (VAFN), установленное на дальнем по потоку конце газотурбинного двигателя и включающее в себя множество створок, и по меньшей мере один привод, выполненный с возможностью перемещения указанного множества створок, и систему управления, имеющую оперативную связь с газотурбинным двигателем и вентиляторным соплом с изменяемым сечением. Система управления может включать в себя по меньшей мере один датчик давления, выполненный с возможностью определения противодавления газотурбинного двигателя, по меньшей мере один тензодатчик, выполненный с возможностью определения механического напряжения лопасти вентилятора газотурбинного двигателя, и модуль управления, имеющий оперативную связь с указанным по меньшей мере одним датчиком давления, указанным по меньшей мере одним тензодатчиком, и первичную систему, выполненную с возможностью сбора первичных данных, характеризующих рабочий режим вентиляторного сопла с изменяемым сечением.
[0014] Согласно этому аспекту модуль управления может быть выполнен с возможностью: вычисления площади сечения вентиляторного сопла с изменяемым сечением в реальном времени на основании по меньшей мере частично первичных данных, выработки команды на привод на основании по меньшей мере частично указанной площади сечения в реальном времени и заданной таблицы площадей сечения, предварительно заложенной в виде программы в запоминающее устройство модуля управления, изменения команды на привод на основе определенного противодавления и/или определенного механического напряжения лопасти вентилятора и отправки измененной команды на привод на указанный по меньшей мере один привод вентиляторного сопла с изменяемым сечением для корректирования указанного множества створок.
[0015] В одном варианте реализации указанный по меньшей мере один датчик давления может включать в себя лидарный датчик давления и/или трубку Пито.
[0016] Еще в одном варианте реализации модуль управления может быть реализован с помощью средств электронного управления двигателем и блока управления вентиляторным соплом с изменяемым сечением.
[0017] Еще в одном варианте реализации модуль управления может включать в себя устройство управления на основе модели, выполненное с возможностью оценки площади сечения вентиляторного сопла с изменяемым сечением, когда первичные данные недоступны.
[0018] Еще в одном варианте реализации устройство управления на основе модели может включать в себя обучающийся алгоритм для оценки площади сечения сопла на основании входных сигналов, подаваемых в средства электронного управления двигателем.
[0019] Еще в одном варианте реализации модуль управления также может быть выполнен с возможностью определения переходного режима работы газотурбинного двигателя, если площадь сечения, полученная в результате оценки от устройства управления на основе модели, находится за пределами заданного запаса вычисленной площади сечения, определенной блоком управления вентиляторным соплом с изменяемым сечением.
[0020] В соответствии еще с одним аспектом раскрыт способ управления площадью сечения вентиляторного сопла с изменяемым сечением (VAFN). Вентиляторное сопло с изменяемым сечением может иметь множество створок и может быть использовано с газотурбинным двигателем. Способ может включать сбор первичных данных, характеризующих рабочий режим вентиляторного сопла с изменяемым сечением; сбор вторичных данных, характеризующие противодавление и механическое напряжение лопасти вентилятора газотурбинного двигателя; вычисление площади сечения вентиляторного сопла с изменяемым сечением на основании первичных данных; выработку необходимой площади сечения сопла на основании по меньшей мере частично заданной таблицы площадей сечения; получение команды на привод на основе разности между вычисленной площадью сечения сопла и необходимой площадью сечения сопла; корректирование команды на привод на основании вторичных данных; и отправку откорректированной команды на привод на вентиляторное сопло с изменяемым сечением для перемещения указанного множества створок, при этом указанные вычисление, выработку, получение, корректирование и отправку выполняют модулем управления, связанным с вентиляторным соплом с изменяемым сечением и газотурбинным двигателем.
[0021] В одном варианте реализации способ может также включать изучение площади сечения вентиляторного сопла с изменяемым сечением на основе входных сигналов, подаваемых в средства электронного управления двигателем газотурбинного двигателя, при этом изучение выполняют посредством устройства управления на основе модели, содержащегося в системе управления.
[0022] Еще в одном варианте реализации способ может также включать использование вторичных данных для определения переходного режима работы газотурбинного двигателя.
[0023] Еще в одном варианте реализации способ может также включать предупреждение членов экипажа летательного аппарата о переходном режиме работы и перемещение указанного множества створок вентиляторного сопла с изменяемым сечением в положение безотказной работы при определении переходного режима работы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
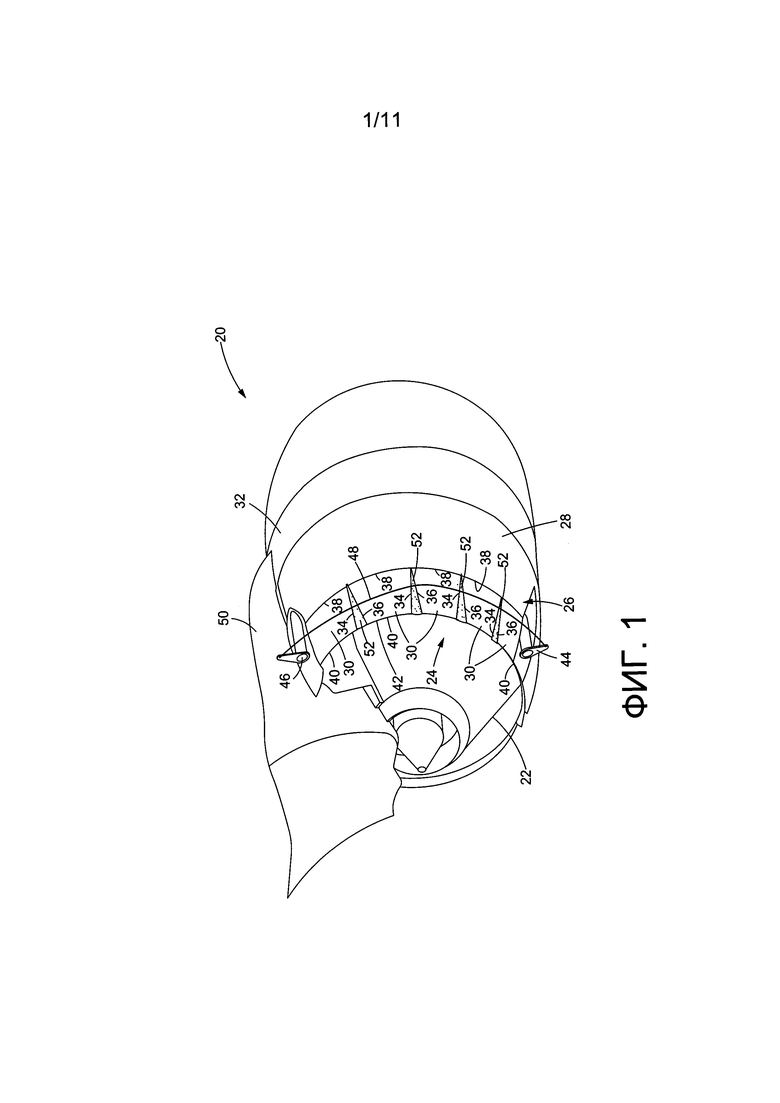
[0024] На ФИГ. 1 показан перспективный вид газотурбинного двигателя в соответствии с одним вариантом реализации раскрытия настоящего изобретения;
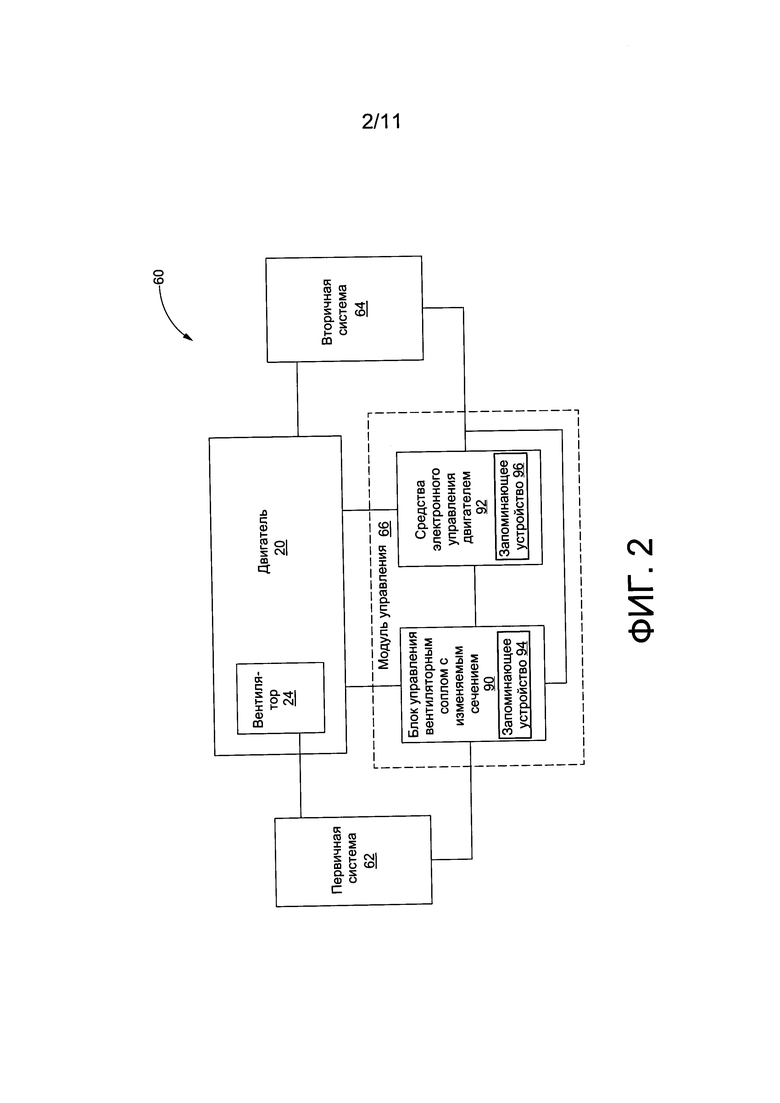
[0025] на ФИГ. 2 схематически представлена система управления вентиляторным соплом с изменяемым сечением (VAFN) газотурбинного двигателя по ФИГ. 1;
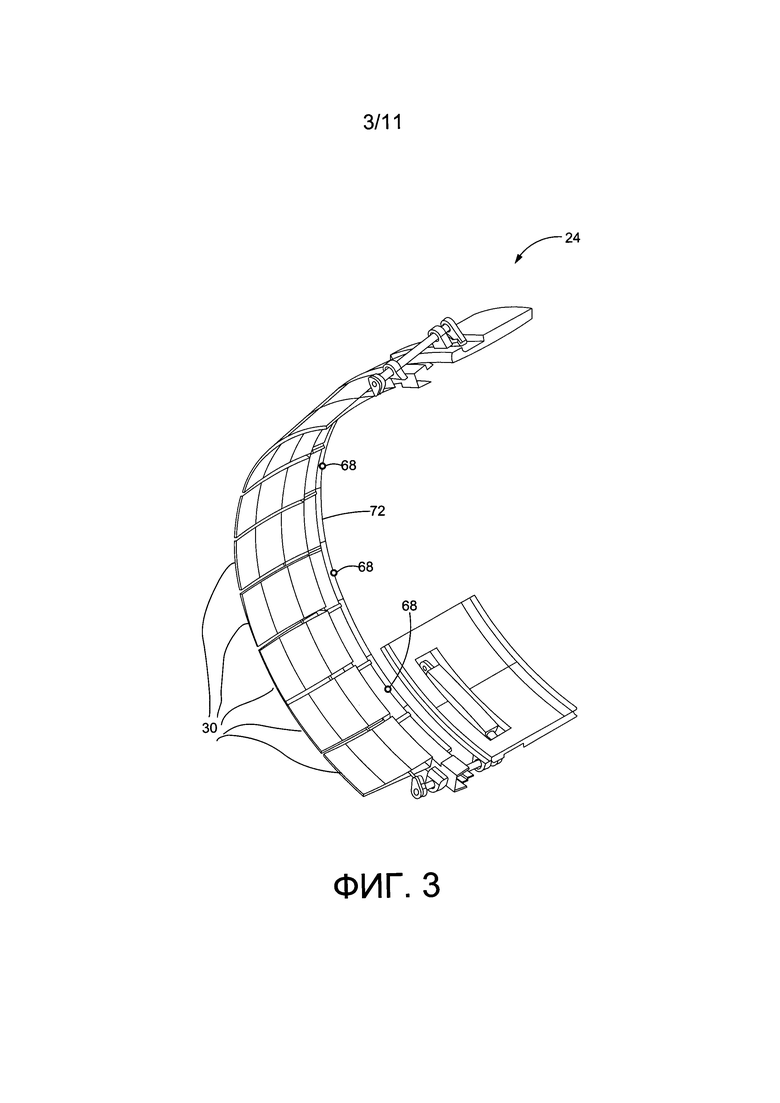
[0026] на ФИГ. 3 показан перспективный вид части вентиляторного сопла с изменяемым сечением газотурбинного двигателя по ФИГ. 1, если смотреть сзади вперед;
[0027] на ФИГ. 4 показан перспективный вид вентиляторной секции газотурбинного двигателя по ФИГ. 1;
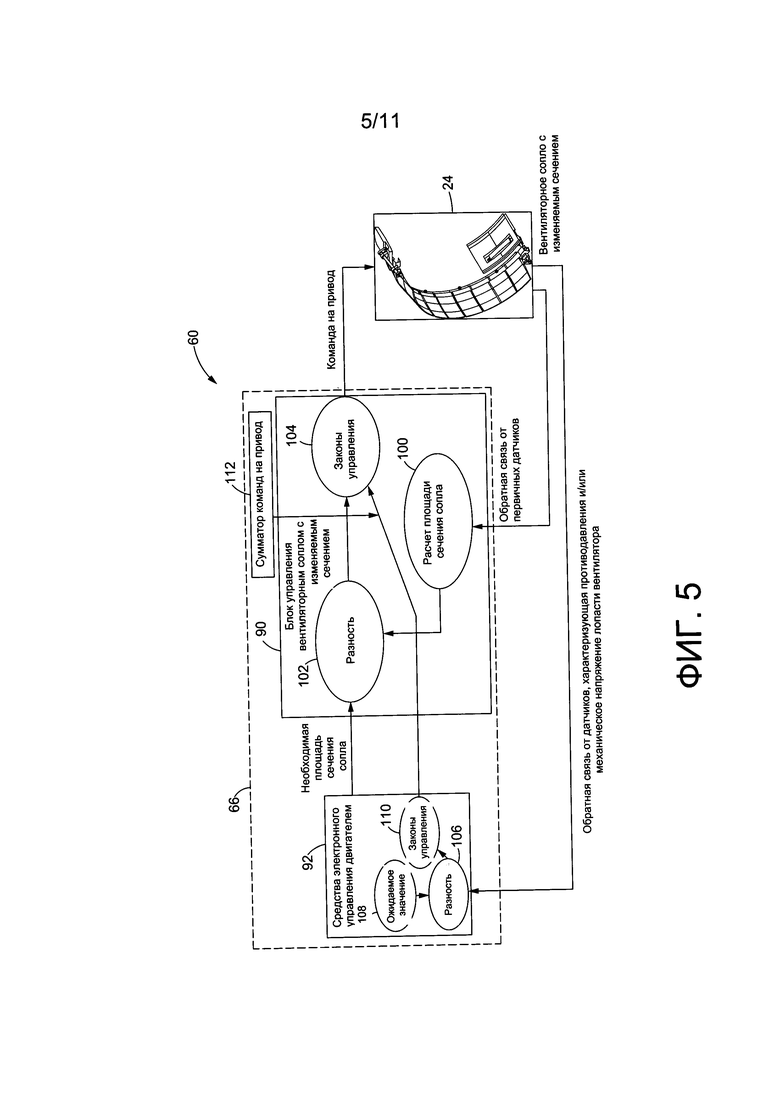
[0028] на ФИГ. 5 схематически показана система управления вентиляторным соплом с изменяемым сечением;
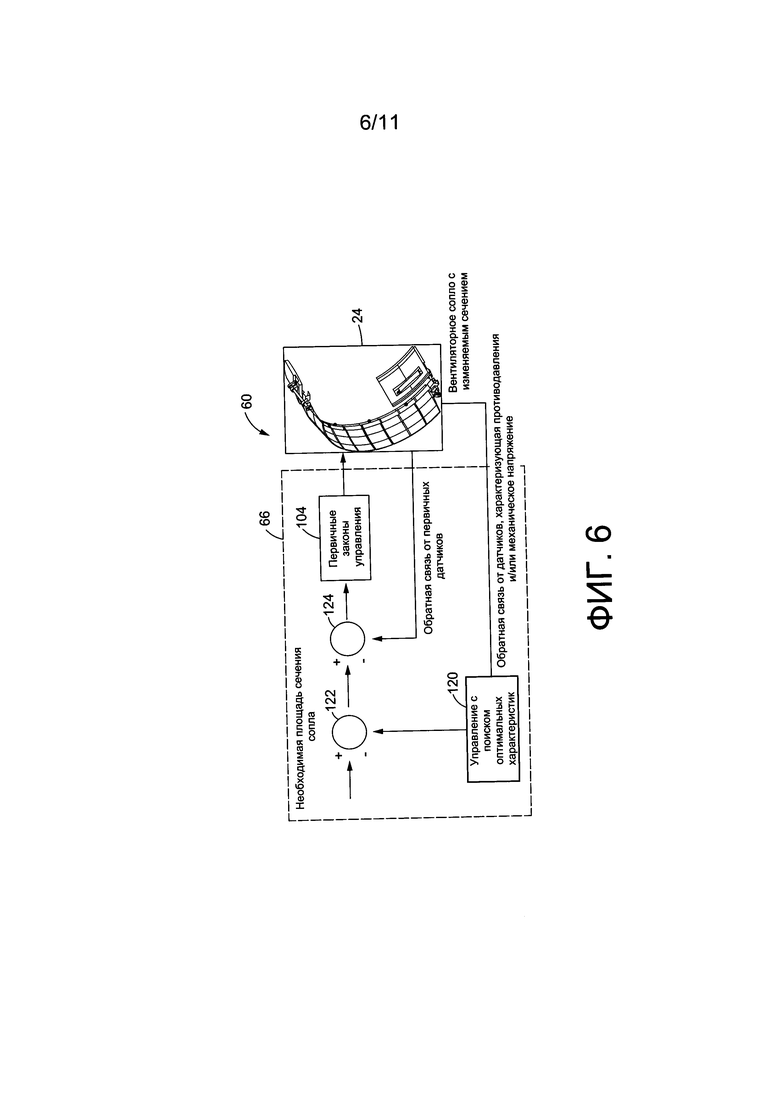
[0029] на ФИГ. 6 показана схема на основе теории управления для системы управления вентиляторным соплом с изменяемым сечением;
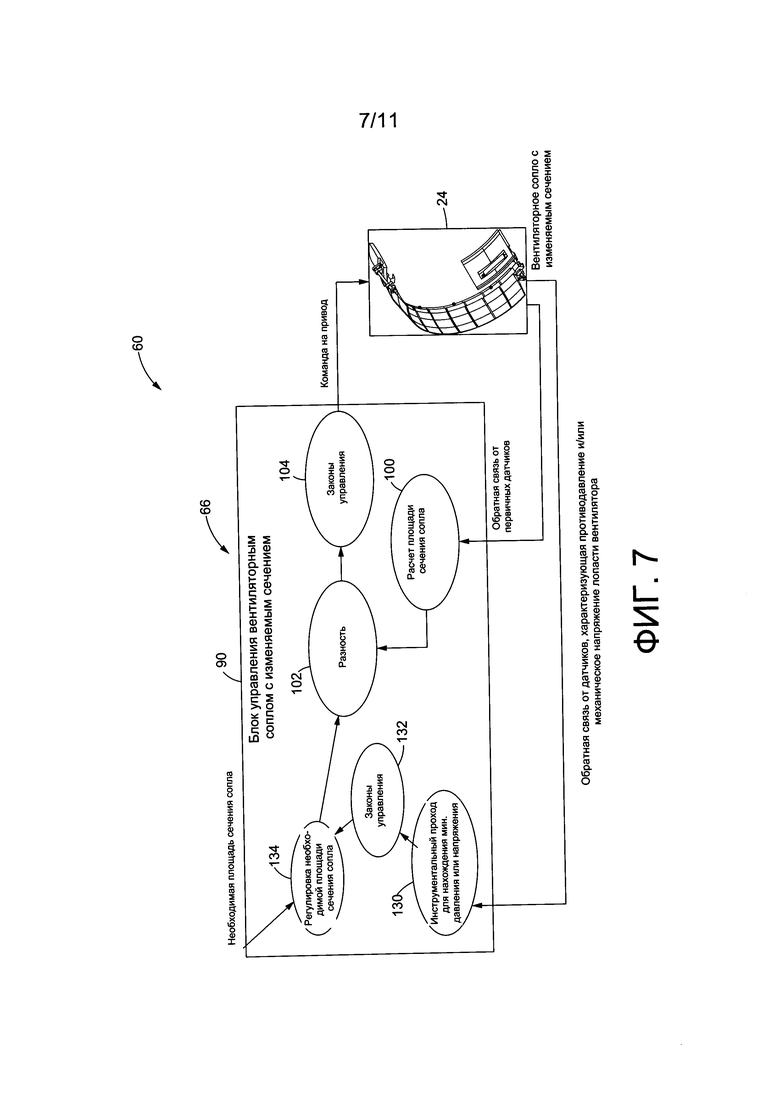
[0030] на ФИГ. 7 схематически показана система управления вентиляторным соплом с изменяемым сечением;
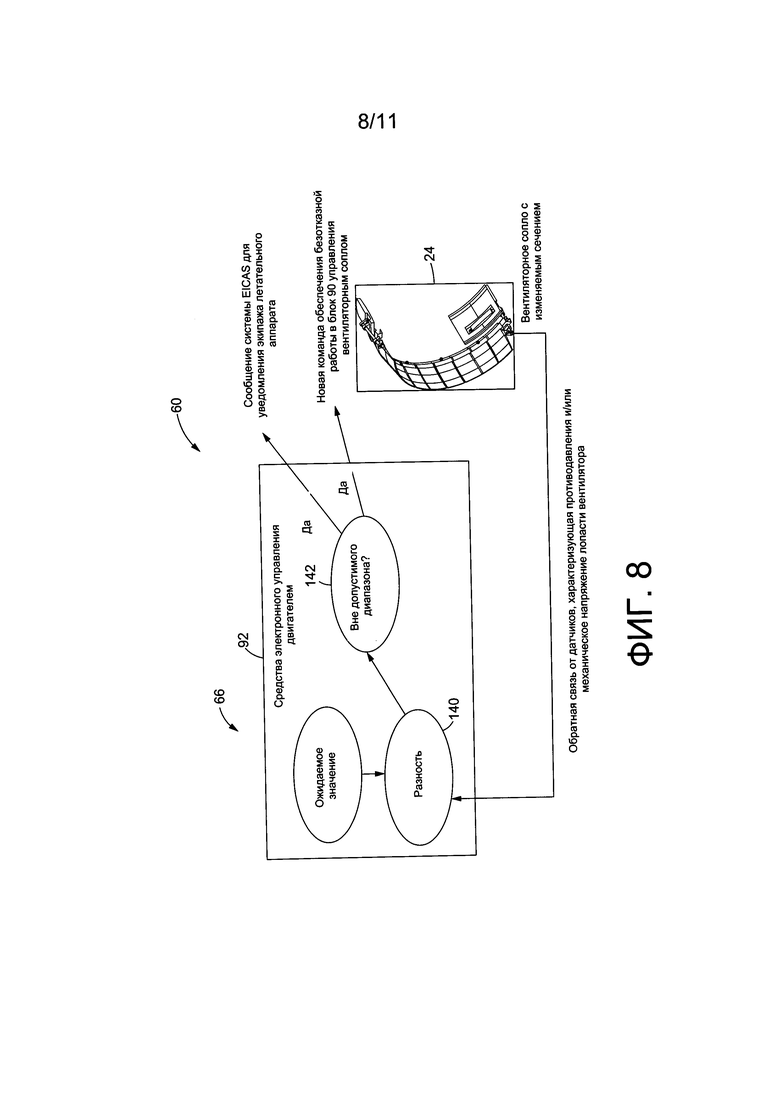
[0031] на ФИГ. 8 схематически показана система управления вентиляторным соплом с изменяемым сечением;
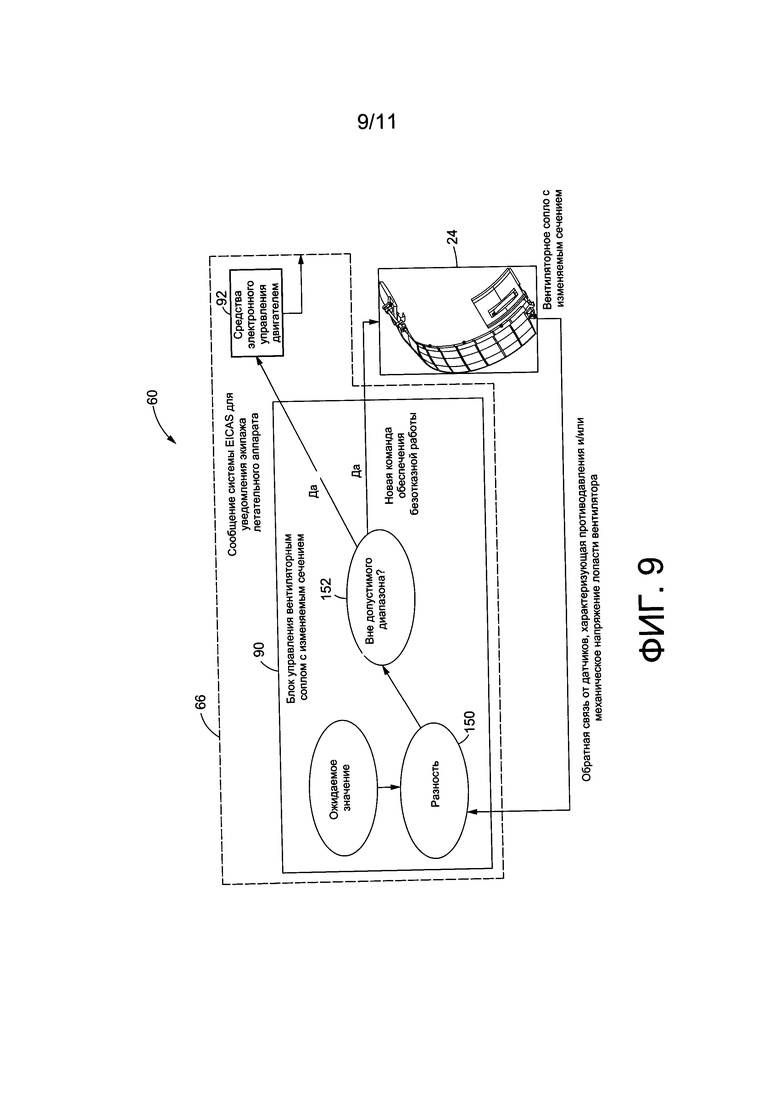
[0032] на ФИГ. 9 схематически показана система управления вентиляторным соплом с изменяемым сечением;
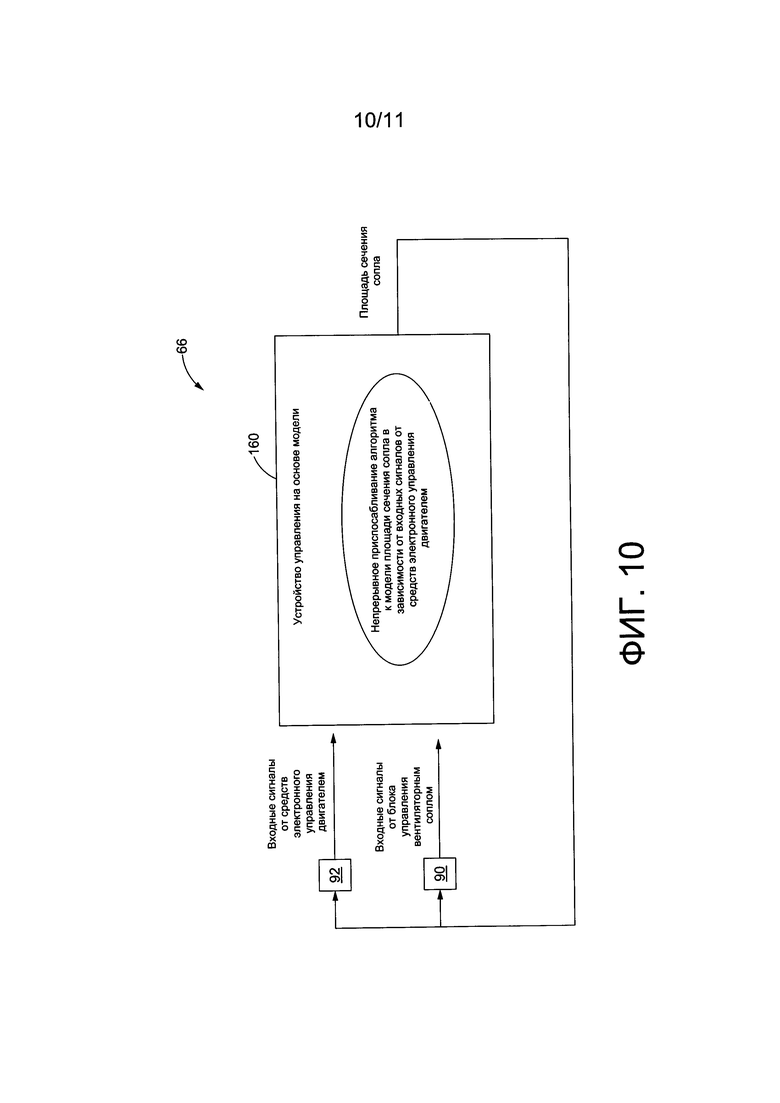
[0033] на ФИГ. 10 схематически показано устройство управления на основе модели и
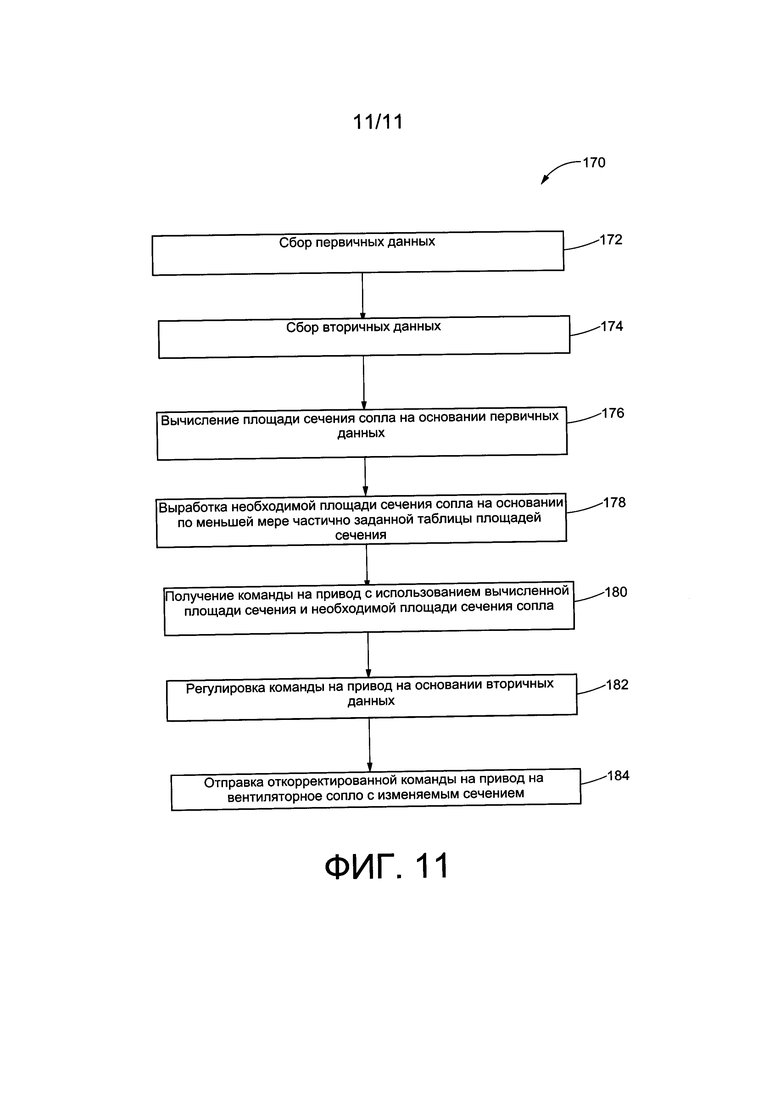
[0034] на ФИГ. 11 показана блок-схема, иллюстрирующая пример процесса управления площадью сечения вентиляторного сопла с изменяемым сечением.
[0035] Хотя в раскрытие настоящего изобретения могут быть выполнены различные модификации и альтернативные конструкции, ниже будут показаны и подробно описаны некоторые иллюстративные варианты его реализации. Раскрытие настоящего изобретения не ограничивается раскрытыми конкретными вариантами реализации, а наоборот включает в себя все модификации, альтернативные конструкции и их эквиваленты.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0036] На чертежах и с конкретной ссылкой на ФИГ. 1 показан двигатель 20 в соответствии с некоторыми вариантами реализации раскрытия настоящего изобретения. Хотя двигатель 20 представлен в виде газотурбинного двигателя, он может быть любого другого типа. Следует понимать, что двигатель 20 показан в основном в иллюстративных целях, чтобы способствовать раскрытию признаков различных вариантов реализации, и что на ФИГ. 1 не показаны все компоненты двигателя. Кроме того, двигатель 20 содержится в летательном аппарате и используется для создания тяги. При этом двигатель 20 также может быть использован на земле, в море и воздухе для выработки электроэнергии.
[0037] Двигатель 20 включает в себя сопло 22 внутреннего контура двигателя и вентиляторное сопло 24 с изменяемым сечением (VAFN). Сопло 22 внутреннего контура двигателя образует дальний по потоку конец обтекателя внутреннего контура двигателя, который окружает внутренний контур двигателя (не показано). Вентиляторное сопло 24 с изменяемым сечением установлено на дальнем по потоку конце 26 или области кромки оболочки 28 реверсивного устройства. Дальний по потоку конец 26 образует дальний по потоку конец двигателя 20. Оболочка 28 перекрывает по меньшей мере часть обтекателя внутреннего контура двигателя. Двигатель 20 обеспечивает тягу как от выхлопного потока внутреннего контура двигателя, выходящего из сопла 22 внутреннего контура двигателя, так и от вентиляторного потока, выходящего из вентиляторного сопла 24 с изменяемым сечением. Поток внутреннего контура обычно имеет большую скорость, чем вентиляторный поток.
[0038] Вентиляторное сопло 24 с изменяемым сечением включает в себя множество створок 30, выполненных с возможностью изменения вентиляторного потока, проходящего через канал 32 наружного контура двигателя 20. Створки 30 могут быть упруго деформируемыми створками или жесткими поворотными створками. В одном примере каждая из указанного множества створок 30 в целом имеет форму трапеции, хотя створки 30 могут иметь любую другую форму. Каждая из створок 30 имеет первую сторону 34 и противоположную вторую сторону, которые проходят в целом в продольном направлении от опорного конца 38 к свободному концу 40. Створки 30 могут быть расположены сторона к стороне по окружности канала 32 наружного контура, при этом опорные концы 38 створок 30 установлены на дальнем по потоку конце 26 оболочки 28 реверсивного устройства. Свободные концы 40 створок 30 образуют отверстие 42 сопла или окружность, которые связаны с площадью сечения вентиляторного сопла 24 с изменяемым сечением.
[0039] Створки 30 выполнены с возможностью изменения площади сечения, чтобы изменять вентиляторный поток, проходящий через канал 32 наружного контура. Например, створки 30 могут быть перемещены внутрь или наружу с помощью приводов 44, 46, соединенных с гибким стержнем 48. Гибкий стержень 48 может нажимать на створки 30, расположенные между приводами 44, 46. Приводы 44, 46 могут приводиться в действие гидравлически посредством электрогидравлических сервоклапанов, выполненных с возможностью управления подачей гидравлической текучей среды в приводы 44, 46. При этом могут быть использованы другие конфигурации для приведения в действие указанного множества створок 30.
[0040] В примере, показанном на ФИГ. 1, вентиляторное сопло 24 с изменяемым сечением включает в себя два комплекта створок 30, расположенных на противоположных сторонах пилона 50 двигателя, хотя на этом чертеже виден только один комплект створок 30. Гибкий стержень 48, расположенный в целом по окружности, содержит тросик, проходящий между приводами 44, 46. Гибкий стержень 48 контактирует со всеми створками в соответствующем комплекте створок, а концы гибкого стержня 48 прикреплены к приводам 44, 46, например, через рычаги, установленные на осях.
[0041] Кроме того, смежные створки 30 в каждом комплекте створок могут быть разделены промежутком, заполненным уплотнением 52 из эластомера. Уплотнения 52, выполненные из силиконовой резины или любого другого подходящего материала, используются для предотвращения утечки воздуха изнутри наружу вентиляторного сопла 24 с изменяемым сечением. Уплотнения 52 возвращаются из растянутого состояния в обычное состояние во время приведения створок 30 в действие изнутри. Могут быть использованы другие конфигурации для вентиляторного сопла 24 с изменяемым сечением. Кроме того, аспекты раскрытия настоящего изобретения могут применяться к другим типам вентиляторного сопла 24 с изменяемым сечением.
[0042] Как показано на ФИГ. 2 со ссылкой на ФИГ. 1, двигатель 20 также включает в себя систему управления 60 вентиляторным соплом 24 с изменяемым сечением. Система 60 управления содержит первичную систему 62, вторичную систему 64 и модуль 66 управления, имеющий оперативную связь с первичной системой 62 и вторичной системой 64. Каждая из первичной системы 62 и вторичной системы 64 содержит сенсорную систему.
[0043] В частности, первичная система 62 выполнена с возможностью сбора первичных данных, характеризующих текущий рабочий режим вентиляторного сопла 24 с изменяемым сечением в реальном времени, а вторичная система 64 выполнена с возможностью сбора вторичных данных, характеризующих текущий рабочий режим двигателя 20 в реальном времени. Первичные данные от первичной системы 62 используются для определения текущей площади сечения вентиляторного сопла 24 с изменяемым сечением. Вторичные данные от вторичной системы 64 используются для оптимизации или корректирования площади сечения вентиляторного сопла 24 с изменяемым сечением. При этом оптимальное положение створок 30 может быть определено на основе текущих рабочих характеристик двигателя 20 и вентиляторного сопла 24 с изменяемым сечением.
[0044] Например, первичная система 62 включает в себя один или более волоконно-оптических датчиков формы, фотограмметрических компонентов, периферийных датчиков, дифференциальные трансформаторы для измерения линейных перемещений (LVDT) и т.п. Такие сенсорные технологии обеспечивают сбор первичных данных для вентиляторного сопла 24 с изменяемым сечением, таких как измерения механического напряжения на створках 30, трехмерные координаты створок 30, положения приводов 44, 46 и т.п. Однако могут быть использованы и другие типы сенсорных технологий, такие как датчики на эффекте Холла и/или лидарные датчики, для сбора первичных данных, характеризующих текущие рабочие режимы вентиляторного сопла 24 с изменяемым сечением в реальном времени.
[0045] Вторичная система 64 включает в себя один или более датчиков 68 давления, показанных на ФИГ. 3, и/или один или более тензодатчиков 70 лопасти вентилятора, показанных на ФИГ. 4. Такие сенсорные технологии обеспечивают сбор вторичных данных для двигателя 20, таких как данные, характеризующие противодавление двигателя 20, и данные, характеризующие механическое напряжение лопасти вентилятора двигателя 20. При этом могут быть использованы другие сенсорные технологии, в дополнение или вместо датчиков 68 давления и тензодатчиков 70 лопасти вентилятора, для сбора вторичных данных, характеризующих текущие рабочие режимы двигателя 20. Вторичные данные от вторичной системы 64 используются как для обнаружения переходных режимов работы двигателя 20, так и оптимизации площади сечения вентиляторного сопла 24 с изменяемым сечением.
[0046] В частности, датчики 68 давления выполнены с возможностью определения противодавления двигателя 20, или давления на заднем конце обтекателя внутреннего контура двигателя, в реальном времени. Например, датчики 68 давления могут содержать лидарные датчики давления, трубки Пито и т.п. Датчики 68 давления расположены возле заднего конца обтекателя внутреннего контура двигателя.
[0047] В примере, показанном на ФИГ. 3, датчики 68 давления расположены на крепежной перегородке 72 вентиляторного сопла 24 с изменяемым сечением, которое установлено на обтекателе внутреннего контура двигателя. Кроме того, в примере по ФИГ. 3 каждая вторая створка 30 вентиляторного сопла 24 с изменяемым сечением связана с датчиком 68 давления. При этом могут быть использованы другие конфигурации для расположения и установки датчиков 68 давления.
[0048] Тензодатчики 70 лопасти вентилятора выполнены с возможностью определения механического напряжения лопасти вентилятора двигателя 20 или механического напряжения на множестве лопастей 74 (ФИГ. 4) в вентиляторе 76 (ФИГ. 4) двигателя 20, в реальном времени. Тензодатчики 70 лопасти вентилятора могут содержать волоконно-оптические тензодатчики, или тензодатчики других типов, расположенные на одной или более лопастей 74 вентилятора двигателя 20. Например, тензодатчики 70 лопасти вентилятора могут быть установлены на каждой лопасти 74 вентилятора, на каждой второй лопасти вентилятора или в любой другой конфигурации.
[0049] В примере по ФИГ. 4 тензодатчики 70 лопасти вентилятора встроены внутрь лопастей 74 вентилятора. Например, внутри лопасти 74 вентилятора может быть канал для приема тензодатчика 70 лопасти вентилятора. При этом могут быть использованы другие конфигурации для установки тензодатчиков 70 лопасти вентилятора на лопасти 74 вентилятора.
[0050] Кроме того, в примере по ФИГ. 4 каждый из тензодатчиков 70 лопасти вентилятора проходит вдоль всей лопасти 74 вентилятора от основания 78 лопасти 74 до конца 80 лопасти 74. Тензодатчики 70 лопасти вентилятора могут быть расположены возле передней кромки 82, задней кромки 84 или средней точки 86 лопасти 74 вентилятора. При этом могут быть использованы другие положения тензодатчиков 70 лопасти вентилятора.
[0051] Как показано на ФИГ. 2, модуль 66 управления имеет оперативную связь с двигателем 20, вентиляторным соплом 24 с изменяемым сечением, первичной системой 62 и вторичной системой 64. Модуль 66 управления может быть реализован с использованием одного или более следующих средств: процессор, микропроцессор, микроконтроллер, цифровой сигнальный процессор (DSP), программируемая вентильная матрица (FPGA), электронный модуль управления (ЕСМ), электронный блок управления (ECU) и процессорное устройство, которое может включать в себя или быть связано с некратковременным компьютерочитаемым устройством для хранения, на котором хранятся выполняемые компьютером инструкции или любые другие подходящие средства для электронного управления функциональными возможностями двигателя 20, вентиляторного сопла 24 с изменяемым сечением и указанного множества створок 30.
[0052] В примере по ФИГ. 2 модуль 66 управления содержит блок 90 управления вентиляторным соплом с изменяемым сечением и средства 92 электронного управления двигателем. При этом могут быть использованы другие конфигурации модуля 66 управления. Блок 90 управления вентиляторным соплом с изменяемым сечением и средства 92 электронного управления двигателем выполнены с возможностью управления согласно заданным алгоритмам или наборам инструкций для управления системой 60 управления.
[0053] Такие алгоритмы или наборы инструкций могут быть запрограммированы или встроены в запоминающее устройство 94 и запоминающее устройство 96, связанные с блоком 90 управления вентиляторным соплом с изменяемым сечением и средствами 92 электронного управления двигателем соответственно или по меньшей мере доступные для блока 90 и средств 92. Каждое из запоминающих устройств 94, 96 может содержать энергонезависимое запоминающее устройство, выполненное внутри и/или снаружи относительно блока 90 управления вентиляторным соплом с изменяемым сечением и средств 92 электронного управления двигателем, соответственно. Понятно, что блок 90 управления вентиляторным соплом с изменяемым сечением, средства 92 электронного управления двигателем и система 60 управления может включать в себя другие аппаратные средства, программное обеспечение, прошивку и их комбинации.
[0054] Кроме того, средства 92 электронного управления двигателем выполнены с возможностью выработки необходимой площади сечения и отправки соответствующего сигнала в блок 90 управления вентиляторным соплом с изменяемым сечением. В одном примере средства 92 электронного управления двигателем могут вырабатывать значение необходимой площади сечения сопла на основании рабочего режима двигателя. Например, средства 92 электронного управления двигателем могут включать в себя заданную таблицу оптимальной или необходимой площади сечения сопел для различных рабочих режимов двигателя с тем, чтобы получить необходимый результат. Заданная таблица необходимых площадей сечения сопел может быть предварительно заложена в виде программы в запоминающее устройство 96, связанное со средствами 92 электронного управления двигателем.
[0055] Примеры рабочих режимов двигателя могут включать в себя взлетный режим, режим набора высоты, крейсерский режим, полетные режимы, режимы тяги и т.п. Примеры необходимых результирующих параметров могут включать в себя более низкие сгорание топлива, расход топлива, тяги и т.п. На основе рабочего режима двигателя в реальном времени средства 92 электронного управления двигателем извлекают из запоминающего устройства 96 значение необходимой площади сечения из заданной таблицы.
[0056] После этого средства 92 электронного управления двигателем отправляют команду в блок 90 управления вентиляторным соплом с изменяемым сечением для достижения соответствующей площади отверстия вентиляторного сопла 24 с изменяемым сечением для текущего рабочего режима двигателя. Средства 92 электронного управления двигателем также могут определять невозможность достижения оптимальной площади для конкретного рабочего режима двигателя и могут определять неоптимальную площадь для этого конкретного режима. Блок 90 управления вентиляторным соплом с изменяемым сечением управляет скоростью движения створок 30 в различные положения или сохраняет положение для достижения необходимой площади сечения сопла.
[0057] На основании, по меньшей мере частично, сигнала, указывающего необходимую площадь сечения, от средств 92 электронного управления двигателем блок 90 управления вентиляторным соплом с изменяемым сечением отправляет соответствующие сигналы в электрогидравлический сервоклапан, чтобы управлять гидравлическим потоком к приводам 44, 46. Например, блок 90 управления вентиляторным соплом с изменяемым сечением может отправлять сигналы в электрогидравлический сервоклапан, чтобы увеличивать или уменьшать гидравлический поток к приводам 44, 46 гибкого стержня 48 и перемещать створки 30 наружу или внутрь для изменения формы отверстия 42 сопла (ФИГ. 1) и достижения необходимой площади сечения. Блок 90 управления вентиляторным соплом с изменяемым сечением также может отправлять сигналы в электрогидравлический сервоклапан для сохранения одного и того же гидравлического потока к приводам 44, 46, чтобы поддерживать ту же самую площадь сопла.
[0058] На ФИГ. 5 со ссылкой на ФИГ. 1-4 приведено еще одно схематическое представление системы 60 управления. Согласно этому аспекту модуль 66 управления также выполнен с возможностью оптимизации площади сечения вентиляторного сопла 24 с изменяемым сечением на основании первичных данных и вторичных данных от первичной системы 62 и вторичной системы 64, соответственно. В частности, блок 90 управления вентиляторным соплом с изменяемым сечением выполнен с возможностью приема от первичной системы 62 первичных данных, таких как данные, характеризующие измерения механического напряжения на створках 30, трехмерные координаты створок 30 и положения приводов. Блок 90 управления вентиляторным соплом с изменяемым сечением выполнен с возможностью определения площади сечения вентиляторного сопла 24 с изменяемым сечением в реальном времени на основании первичных данных, как показано в модуле 100.
[0059] Например, наряду с первичными данными от первичной системы 62 блок 90 управления вентиляторным соплом с изменяемым сечением может использовать заданные формулы и информацию, такие как геометрия вентиляторного сопла 24 с изменяемым сечением, предварительно заложенные в виде программы в запоминающее устройство 94, для вычисления площади сечения вентиляторного сопла 24 с изменяемым сечением в реальном времени. Блок 90 управления вентиляторным соплом с изменяемым сечением также выполнен с возможностью приема от средств 92 электронного управления двигателем сигнала, характеризующего необходимую площадь сечения. Кроме того, блок 90 управления вентиляторным соплом с изменяемым сечением выполнен с возможностью определения разности между площадью сечения в реальном времени и необходимой площадью сечения, в модуле 102. На основании, по меньшей мере частично, определенной разности между вычисленной площадью сечения и необходимой площадью сечения, блок 90 управления вентиляторным соплом с изменяемым сечением также выполнен с возможностью использования законов управления с выработкой команд на привод для корректирования створок 30 вентиляторного сопла 24 с изменяемым сечением, в модуле 104.
[0060] Команду на привод отправляют на электрогидравлические сервоклапана, которые управляют гидравлическим потоком к приводам 44, 46 гибкого стержня 48 в контакте со створками 30. Например, блок 90 управления вентиляторным соплом с изменяемым сечением может быть выполнен с возможностью использования пропорционально-интегрально-дифференциального управления (PID), линейной квадратической регрессии (LQR) или двухпозиционного корректирования. Однако могут быть использованы другие типы управления на основе контура обратной связи и законов управления. В частности, с использованием законов управления, таких как PID, LQR или двухпозиционное корректирование, блок 90 управления вентиляторным соплом с изменяемым сечением непрерывно применяет разность между вычисленной площадью сечения в реальном времени и необходимой площадью сечения в качестве обратной связи для выработки команд на привод и изменения площади сечения в реальном времени.
[0061] Кроме того, модуль 66 управления также выполнен с возможностью корректирования площади сечения в реальном времени на основании вторичных данных от вторичной системы 64. В частности, средства 92 электронного управления двигателем выполнены с возможностью приема вторичных данных от вторичной системы 64, таких как данные, характеризующие противодавление в режиме реального времени двигателя 20 и/или механическое напряжение лопасти вентилятора двигателя 20 в реальном времени. Средства 92 электронного управления двигателем выполнены с возможностью определения на основании вторичных данных разности между вторичными данными и заданными значениями для одного и того же параметра, в модуле 106.
[0062] Заданные значения противодавления и механического напряжения лопасти вентилятора предварительно заложены в виде программы в запоминающее устройство 96, связанное со средствами 92 электронного управления двигателем. Например, в модуле 108 заданные значения противодавления и механического напряжения лопасти вентилятора содержат ожидаемые значения противодавления и механического напряжения лопасти вентилятора, соответственно, на основе режима полета, числа оборотов двигателя, числа Маха, высоты и т.п. Заданные значения противодавления и механического напряжения лопасти вентилятора определяют исходя из предыдущего анализа, такого как компьютерное моделирование, анализ на основе модели, результаты наземных испытаний, результаты испытаний в полете и т.п.
[0063] Средствами 92 электронного управления двигателем определяют разность между противодавлением в режиме реального времени и заранее определенным противодавлением, а также разность между механическим напряжением лопасти вентилятора в реальном времени и заданным механическим напряжением лопасти вентилятора. Средства 92 электронного управления двигателем также выполнены с возможностью использования законов управления с выработкой команд на привод для отправки в блок 90 управления вентиляторным соплом с изменяемым сечением, в модуле ПО. Например, средства 92 электронного управления двигателем могут быть выполнены с возможностью использования пропорционально-интегрально-дифференциального управления (PID), линейной квадратической регрессии (LQR) или двухпозиционного корректирования, хотя могут быть использованы другие типы управления на основе контура обратной связи и законов управления. Средства 92 электронного управления двигателем используют законы управления для непрерывного применения разности между вторичными данными и заданными значениями, чтобы вырабатывать команду на привод и изменять площадь сечения в реальном времени.
[0064] Кроме того, модуль 66 управления включает в себя сумматор 112, выполненный с возможностью объединения команды на привод от средств 92 электронного управления двигателем с законами управления, в модуле 104, в блоке 90 управления вентиляторным соплом с изменяемым сечением для выработки команды на привод на вентиляторное сопло 24 с изменяемым сечением и корректирования створок 30. Сумматор 112 объединяет вторичные данные с первичными данными для оптимизации площади сечения вентиляторного сопла 24 с изменяемым сечением. При этом модуль 66 управления использует как обратную связь от датчика двигателя 20, так и обратную связь от датчика вентиляторного сопла 24 с изменяемым сечением для точного расположения створок 30, тем самым обеспечивая улучшенные характеристики сгорания топлива, управляемости и/или тяги в различных режимах полета.
[0065] На ФИГ. 6 со ссылкой на ФИГ. 1-5 показана схема на основе теории управления для системы 60 управления. Согласно этому аспекту вторичные данные используются в управлении с поиском оптимальных характеристик, при котором выполняют инструментальный проход (sweep) площади сечения с небольшими приращениями и выбор оптимального или необходимого положения створок 30 вентиляторного сопла 24 с изменяемым сечением исходя из произведенного инструментального прохода для данного режима полета, в модуле 120. В частности, модуль 66 управления выполнен с возможностью перемещения приводов 44, 46 вентиляторного сопла 24 с изменяемым сечением в пределах заданного допуска и выбора положения привода, которое обеспечивает оптимальное или необходимое результирующее противодавление и/или оптимальное или необходимое результирующее механическое напряжение лопасти вентилятора. Например, заданный допуск может быть установлен на один процент (1%) от номинальной площади сечения сопла на основе режима крейсерского полета. При этом могут быть использованы другие значения заданного допуска.
[0066] Модуль 66 управления отправляет сигналы для увеличения или уменьшения гидравлического потока к приводам 44, 46 гибкого стержня 48 и перемещения створок 30 наружу или внутрь относительно текущего положения створок 30. С каждым небольшим приращением происходит перемещение приводов 44, 46, изменение площади сечения вентиляторного сопла 24 с изменяемым сечением, и выполняют отслеживание противодавления в режиме реального времени и механического напряжения лопасти вентилятора в режиме реального времени, сигналы которых поступают от вторичной системы 64. Оптимальное или необходимое положение для створок 30 выбирают на основе положения привода, которое обеспечивает оптимальное или необходимое результирующее противодавление и/или оптимальное или необходимое результирующее механическое напряжение лопасти вентилятора. Например, для получения оптимальных или необходимых результирующих параметров модуль 66 управления может быть выполнен с возможностью определения минимума или максимума функции затрат на основе противодавления в режиме реального времени и механического напряжения лопасти вентилятора в режиме реального времени.
[0067] Кроме того, модуль 66 управления выполнен с возможностью использования оптимальных или необходимых результирующих параметров исходя из произведенного инструментального прохода при осуществлении управления с поиском оптимальных характеристик, с тем чтобы отрегулировать необходимую площадь сечения от средств 92 электронного управления двигателем. Например, модуль 66 управления может включать в себя первый сумматор 122 для изменения необходимой площади сечения сопла на основании полученных оптимальных или необходимых результирующих параметров исходя из произведенного инструментального прохода при осуществлении управления с поиском оптимальных характеристик. Кроме того, модуль 66 управления может включать в себя второй сумматор 124, который складывает измененную необходимую площадь сечения от первого сумматора 122 с первичными данными от первичной системы 62 для получения откорректированной площади сечения. В модуле 104, законы управления, такие как PID, LQR или двухпозиционное корректирование, используются модулем 66 управления для выработки и отправки команд на привод на вентиляторное сопло 24 с изменяемым сечением для получения откорректированной площади сечения.
[0068] НА ФИГ. 7 показана реализация схемы на основе теории управления по ФИГ. 6. Согласно этому аспекту модуль 66 управления реализует управление с поиском оптимальных характеристик посредством блока 90 управления вентиляторным соплом с изменяемым сечением. В частности, в модуле 130, блок 90 управления вентиляторным соплом с изменяемым сечением выполнен с возможностью осуществления инструментального прохода для получения положения привода, которое обеспечивает оптимальное или необходимое результирующее противодавление и/или оптимальное или необходимое результирующее механическое напряжение лопасти вентилятора. Блок 90 управления вентиляторным соплом с изменяемым сечением также выполнен с возможностью использования законов управления, таких как PID, LQR или двухпозиционное корректирование, для положения привода, полученного посредством указанного инструментального прохода для выработки изменения площади сечения сопла, в модуле 132. Кроме того, модуль 132 выбирает такое изменение площади сечения сопла, которое обеспечивает оптимальный или необходимый результат, получаемый исходя из функции затрат на основе, например, максимальной тяги, минимального расхода топлива, минимального противодавления, минимального механического напряжения лопасти вентилятора, взвешенной комбинации указанного и т.п.
[0069] В модуле 134, изменение площади сечения сопла используется для корректирования необходимой площади сечения от средств 92 электронного управления двигателем с получением откорректированной необходимой площади сечения для вентиляторного сопла 24 с изменяемым сечением. В модуле 102, разность между откорректированной необходимой площадью сечения и вычисленной площадью сечения сопла на основании первичных данных, от модуля 100, определяют блоком 90 управления вентиляторным соплом с изменяемым сечением. В модуле 104, законы управления, такие как PID, LQR или двухпозиционное корректирование, применяют к разности между откорректированной необходимой площадью сечения и вычисленной площадью сечения для выработки и отправки команд на привод на вентиляторное сопло 24 с изменяемым сечением на размещение створок 30. Например, модуль 104 сводит разность между откорректированной необходимой площадью сечения и вычисленной площадью сечения к нулю посредством изменения команд на привод, отправляемых на вентиляторное сопло 24 с изменяемым сечением. При этом могут быть использованы другие конфигурации модуля 66 управления.
[0070] На ФИГ. 8 со ссылкой на ФИГ. 1-7 представлено еще одно схематическое изображение системы 60 управления. В примере по ФИГ. 8, средства 92 электронного управления двигателем выполнены с возможностью определения переходных режимов работы двигателя 20. В частности, средства 92 электронного управления двигателем принимают вторичные данные, такие как текущие значения противодавления и/или механического напряжения лопасти вентилятора, и сравнивают вторичные данные с заданными значениями для одного и того же параметра.
[0071] В модуле 140, разность между значением в реальном времени и заданным значением для противодавления и механического напряжения лопасти вентилятора вычисляют средствами 92 электронного управления двигателем. Средства 92 электронного управления двигателем определяют, находится ли разность между текущим значением и ожидаемым значением в пределах заданного диапазона, предварительно заложенного в виде программы в запоминающее устройство 96, связанное со средствами 92 электронного управления двигателем, в модуле 142. Заданный диапазон указанной разности включает в себя верхний предел и нижний предел приемлемых значений разности между текущим значением и ожидаемым значением для противодавления и механического напряжения лопасти вентилятора. Верхний и нижний пределы выбирают на основе типа двигателя 20 и/или вентиляторного сопла 24 с изменяемым сечением.
[0072] Если разность между текущим значением и ожидаемым значением противодавления и/или механического напряжения лопасти вентилятора находится за пределами заданного диапазона, средства 92 электронного управления двигателем определяют наличие переходного режима работы двигателя 20 и отправляют сигнал для предупреждения членов экипажа летательного аппарата. Например, средства 92 электронного управления двигателем могут отправлять сигнал в Систему индикации параметров работы двигателя и предупреждения об отказах (EICAS) для выработки сообщения, предупреждающего членов экипажа летательного аппарата. Кроме того, средства 92 электронного управления двигателем могут отправлять сигнал в блок 90 управления вентиляторным соплом с изменяемым сечением для перемещения указанного множества створок 30 в положение безотказной работы, когда вторичные данные указывают на переходный режим работы.
[0073] На основе указанного сигнала от средств 92 электронного управления двигателем, блок 90 управления вентиляторным соплом с изменяемым сечением может отправлять соответствующие сигналы в электрогидравлический сервоклапан для управления гидравлическим потоком к приводам 44, 46. Например, блок 90 управления вентиляторным соплом с изменяемым сечением может отправлять сигналы в электрогидравлический сервоклапан для увеличения или уменьшения гидравлического потока к приводам 44, 46 гибкого стержня 48 и перемещения створок 30 наружу или внутрь для достижения положения безотказной работы. В одном примере положение безотказной работы содержит максимальное перемещение створок 30 наружу, так что отверстие 42 сопла обеспечивает максимальную площадь его сечения.
[0074] Еще в одном примере положение безотказной работы содержит незакрепленное положение, в котором створки 30 не закреплены или перемещаются аэродинамическими силами и силами тяги, воздействующими на створки 30. Еще в одном примере положение безотказной работы содержит максимальное перемещение створок 30 наружу в незакрепленное положение, если максимальная площадь сечения не может быть достигнута. При этом могут быть использованы другие конфигурации положения безотказной работы.
[0075] На ФИГ. 9 со ссылкой на ФИГ. 1-8 представлено еще одно схематическое изображение системы 60 управления. В этом примере блок 90 управления вентиляторным соплом с изменяемым сечением выполнен с возможностью определения переходных режимов работы двигателя 20. Определение переходных режимов работы двигателя 20 происходит аналогично с примером по ФИГ. 8, за исключением того что это определение выполняют блоком 90 управления вентиляторным соплом с изменяемым сечением вместо средств 92 электронного управления двигателем. В частности, блок 90 управления вентиляторным соплом с изменяемым сечением принимает вторичные данные, такие как текущие значения противодавления и/или механического напряжения лопасти вентилятора, и сравнивает вторичные данные с заданными значениями для одного и того же параметра, которые предварительно заложены в виде программы в запоминающее устройство 94 блока управления вентиляторным соплом с изменяемым сечением.
[0076] В модуле 150 блок 90 управления вентиляторным соплом с изменяемым сечением вычисляет разность между вторичными данными и заданными значениями, и определяет, находится ли эта разность в пределах заданного диапазона, предварительно заложенного в виде программы в запоминающее устройство 94 блока 90 управления вентиляторным соплом с изменяемым сечением, в модуле 152. Если разность между текущим значением и ожидаемым значением противодавления и/или механического напряжения лопасти вентилятора находится за пределами заданного диапазона, блок 90 управления вентиляторным соплом с изменяемым сечением определяет переходный режим работы двигателя 20. Блок 90 управления вентиляторным соплом с изменяемым сечением затем отправляет сигнал в средства 92 электронного управления двигателем для извещения членов экипажа летательного аппарата и/или отправляет сигналы на вентиляторное сопло 24 с изменяемым сечением для перемещения указанного множества створок 30 в положение безотказной работы, когда вторичные данные указывают на переходный режим работы.
[0077] Как показано на ФИГ. 10 со ссылкой на ФИГ. 1-9, модуль 66 управления может также включать в себя устройство 160 управления на основе модели. Устройство 160 управления на основе модели может быть реализовано посредством блока 90 управления вентиляторным соплом с изменяемым сечением или отдельного устройства на основе процессора. Кроме того, устройство 160 управления на основе модели включает в себя обучающийся алгоритм, предварительно заложенный в виде программы в запоминающее устройство 94, связанное с блоком 90 управления вентиляторным соплом с изменяемым сечением или другим устройством на основе процессора. С помощью обучающегося алгоритма устройство 160 управления на основе модели изучает или оценивает площадь сечения вентиляторного сопла 24 с изменяемым сечением в реальном времени.
[0078] В частности, устройство 160 управления на основе модели содержит математическую модель, которая принимает входные сигналы от средств 92 электронного управления двигателем и блока 90 управления вентиляторным соплом с изменяемым сечением и непрерывно адаптирует константы в математической модели на основе принятых входных сигналов. Входные сигналы от средств 92 электронного управления двигателем могут включать в себя, без ограничения, число оборотов двигателя, температуры двигателя, число Маха, необходимую площадь сечения сопел и т.п. Входные сигналы от блока 90 управления вентиляторным соплом с изменяемым сечением могут включать в себя, без ограничения, сигналы обратной связи от датчиков от вентиляторного сопла 24 с изменяемым сечением, вычисленные площади сечения, определенные блоком 90 управления вентиляторным соплом с изменяемым сечением и т.п.
[0079] Математическая модель сопоставляет площади сечения вентиляторного сопла 24 с изменяемым сечением в зависимости от входных сигналов от средств 92 электронного управления двигателем и блока 90 управления вентиляторным соплом с изменяемым сечением. Устройство 160 управления на основе модели, таким образом, представляет в реальном времени рабочие характеристики и срок службы двигателя 20. При этом устройство 160 управления на основе модели может функционировать в качестве контроллера резервного копирования для оценки площади сечения вентиляторного сопла 24 с изменяемым сечением в реальном времени, если первичные данные от первичной системы 62 недоступны. Например, при определении переходного режима работы двигателя 20 устройство 160 управления на основе модели перестает адаптировать константы в математической модели и использует входные сигналы от средств 92 электронного управления двигателем и последнюю обновленную версию математической модели для оценки площади сечения вентиляторного сопла 24 с изменяемым сечением в реальном времени. Это позволяет обеспечить ограниченное по времени распределение работы двигателя 20 без опоры на первичную систему 62.
[0080] Кроме того, устройство 160 управления на основе модели может обеспечить альтернативные средства обнаружения переходных режимов работы двигателя 20. Устройство 160 управления на основе модели выполнено с возможностью сравнения площади сечения, полученной в результате оценки из математической модели, с вычисленной площадью сечения, определенной блоком 90 управления вентиляторным соплом с изменяемым сечением. Если площадь сечения, полученная в результате оценки из математической модели, не равна вычисленной площади сечения, полученной от блока 90 управления вентиляторным соплом с изменяемым сечением, или если площадь сечения, полученная в результате оценки, находится за пределами заданного запаса вычисленной площади сечения, полученной от блока 90 управления вентиляторным соплом с изменяемым сечением, устройство 160 управления на основе модели оказывается выполнено с возможностью определения переходного режима работы двигателя 20. Устройство 160 управления на основе модели также выполнено с возможностью отправки сигналов в средства 92 электронного управления двигателем для предупреждения членов экипажа летательного аппарата о переходном режиме работы.
Промышленная применимость
[0081] Из вышеизложенного вполне очевидно, что идеи раскрытия настоящего изобретения могут найти промышленное применение, позволить получить технические результаты и преимущества в любом количестве различных ситуаций, в том числе, но не ограничиваясь этим, для двигателей, таких как газотурбинные двигатели. Такие двигатели могут быть использованы, например, на летательных аппаратах, для создания тяги, или при решении задач на земле, в море и воздухе для выработки электроэнергии.
[0082] Раскрытие настоящего изобретения обеспечивает систему управления вентиляторным соплом с изменяемым сечением (VAFN) газотурбинного двигателя. Раскрытая система управления использует данные датчика первичной системы от вентиляторного сопла с изменяемым сечением для определения площади сечения в реальном времени, вместе с заданными таблицами соответствия, предварительно заложенными в виде программы в запоминающее устройство, связанное с системой управления, для выработки команд на привод, подаваемых для створок вентиляторного сопла с изменяемым сечением. Кроме того, раскрытая система управления использует данные датчика вторичной системы от двигателя для корректирования выработанной команды на привод и площади сечения вентиляторного сопла с изменяемым сечением для управления с поиском оптимальных характеристик.
[0083] Данные датчика вторичной системы включают в себя противодавление двигателя и/или механическое напряжение лопасти вентилятора двигателя. С помощью данных датчика вторичной системы раскрытая система управления также обнаруживает переходные режимы работы двигателя, предупреждает членов экипажа летательного аппарата о переходных режимах работы, и перемещает створки вентиляторного сопла с изменяемым сечением в положение безотказной работы при обнаружении переходных режимов работы. Раскрытая система управления также включает в себя устройство управления на основе модели, которое изучает и оценивает площадь сечения в реальном времени на основе входных сигналов от средств электронного управления двигателем. При этом раскрытая система управления обеспечивает резервную или вторичную систему точного контроля вентиляторным соплом с изменяемым сечением и отслеживания технических характеристик двигателя.
[0084] На ФИГ. 11 со ссылкой на ФИГ. 1-10 показана блок-схема, иллюстрирующая пример процесса 170 управления площадью сечения вентиляторного сопла 24 с изменяемым сечением. Вентиляторное сопло 24 с изменяемым сечением имеет множество створок 30 и используется с газотурбинным двигателем 20. При реализации блока 172 собирают первичные данные, характеризующие рабочий режим вентиляторного сопла 24 с изменяемым сечением от первичной системы 62. При реализации блока 174 собирают вторичные данные, характеризующие противодавление и механическое напряжение лопасти вентилятора газотурбинного двигателя 20 от вторичной системы 64.
[0085] Площадь сечения вентиляторного сопла 24 с изменяемым сечением вычисляют блоком 90 управления вентиляторным соплом с изменяемым сечением на основании первичных данных, при реализации блока 176. Необходимую площадь сечения сопла на основании по меньшей мере частично заданной таблицы площадей сечения сопла вырабатывают средствами 92 электронного управления двигателем, при реализации блока 178. При реализации блока 180 с помощью блока 90 управления вентиляторным соплом с изменяемым сечением получают команду на привод на основе разности между вычисленной площадью сечения и необходимой площадью сечения.
[0086] Команду на привод регулируют блоком 90 управления вентиляторным соплом с изменяемым сечением на основании вторичных данных, при реализации блока 182. При этом, вместо команды на привод, необходимая площадь сечения может быть откорректирована на основании вторичных данных, как описано выше в примере по ФИГ. 6 и 7. При реализации блока 184 откорректированную команду на привод отправляют на вентиляторное сопло 24 с изменяемым сечением для перемещения указанного множества створок 30. Модуль 66 управления, содержащий блок 90 управления вентиляторным соплом с изменяемым сечением и средства 92 электронного управления двигателем, связанные с вентиляторным соплом 24 с изменяемым сечением и газотурбинным двигателем 20, выполняет указанные вычисление, выработку, получение, корректирование и отправку.
[0087] Следует понимать, что блок-схема на ФИГ. 11 показана и описана только в качестве примера, который способствует раскрытию признаков раскрытой системы управления, и что в указанный процесс может быть включено больше или меньше этапов, чем показано, в соответствии с различными признаками, описанными выше для раскрытой системы управления, без отхода от объема раскрытия изобретения.
[0088] Хотя приведенное выше подробное описание дано и представлено в отношении некоторых конкретных вариантов реализации, следует понимать, что объем раскрытия изобретения не должен быть ограничен такими вариантами реализации, а указанные варианты реализации раскрыты только в целях наилучшего представления. Объем и идеи раскрытия настоящего изобретения шире, чем конкретные раскрытые варианты его реализации, и обозначены в приложенной формуле изобретения. Кроме того, хотя некоторые признаки описаны в связи с определенными конкретными вариантами реализации, эти признаки не ограничиваются использованием только с теми вариантами реализации, в связи с которыми они описаны, но могут быть использованы вместе с другими признаками, раскрытыми в связи с альтернативными вариантами реализации, или отдельно от них.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЯТОРНЫЙ МОДУЛЬ С ЛОПАСТЯМИ С ПЕРЕМЕННЫМ УГЛОМ УСТАНОВКИ | 2019 |
|
RU2794134C2 |
| СИЛОВАЯ УСТАНОВКА ДЛЯ САМОЛЕТА КВВП | 1991 |
|
RU2108941C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2012 |
|
RU2747543C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2687861C2 |
| ТУРБОВЕНТИЛЯТОРНЫЙ ДВИГАТЕЛЬ С ДВОЙНЫМ ОБТЕКАНИЕМ | 2007 |
|
RU2472961C2 |
| ФОРСАЖНАЯ КАМЕРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2382894C2 |
| ДВУХКОНТУРНЫЙ ГАЗОТУРБИННЫЙ ВЕНТИЛЯТОРНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2320885C2 |
| ПИЛОН ГАЗОТУРБИННОГО ДВИГАТЕЛЯ В СБОРЕ И СИСТЕМА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2522208C1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2012 |
|
RU2527815C2 |

Раскрыта система управления вентиляторным соплом с изменяемым сечением (VAFN). Вентиляторное сопло с изменяемым сечением может иметь множество створок и может быть использовано с газотурбинным двигателем. Система управления может включать в себя первичную систему, выполненную с возможностью сбора первичных данных, характеризующих рабочий режим вентиляторного сопла с изменяемым сечением, вторичную систему, выполненную с возможностью сбора вторичных данных, характеризующих текущий рабочий режим газотурбинного двигателя, и модуль управления, имеющий оперативную связь с первичной системой и вторичной системой. Модуль управления может быть выполнен с возможностью определения площади сечения вентиляторного сопла с изменяемым сечением на основании по меньшей мере частично первичных данных, корректирования полученной определением площади сечения сопла на основании вторичных данных и расположения указанного множества створок согласно откорректированной площади сечения сопла. 3 н. и 17 з.п. ф-лы, 11 ил.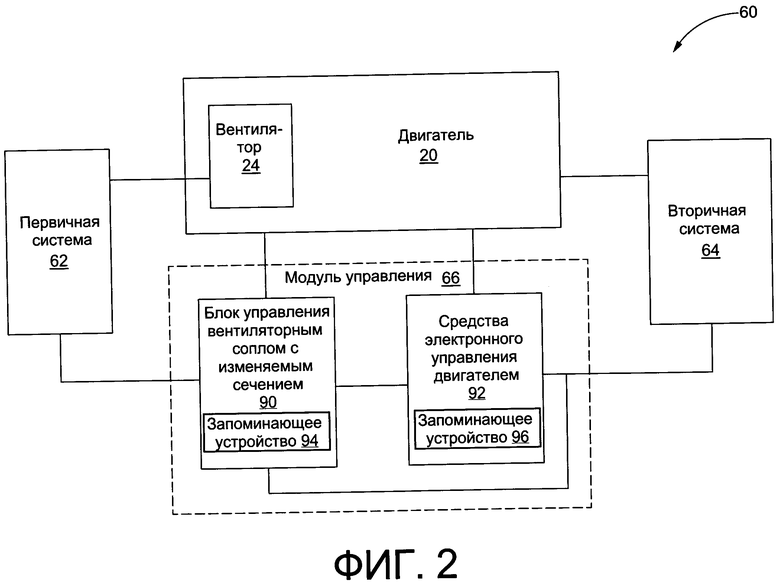
1. Система управления вентиляторным соплом, имеющим множество створок и изменяемое сечение, для использования указанного сопла с газотурбинным двигателем, содержащая:
первичную систему, выполненную с возможностью сбора первичных данных, характеризующих рабочий режим вентиляторного сопла с изменяемым сечением;
вторичную систему, выполненную с возможностью сбора вторичных данных, характеризующих текущий рабочий режим газотурбинного двигателя; и
модуль управления, имеющий оперативную связь с первичной системой и вторичной системой и выполненный с возможностью:
определения площади сечения вентиляторного сопла с изменяемым сечением на основании по меньшей мере частично первичных данных,
корректирования полученной определением площади сечения сопла на основании вторичных данных и
расположения указанного множества створок согласно откорректированной площади сечения сопла.
2. Система управления по п. 1, в которой вторичные данные включают в себя данные, характеризующие противодавление газотурбинного двигателя.
3. Система управления по п. 2, в которой вторичная система включает в себя по меньшей мере один датчик давления, выполненный с возможностью определения противодавления газотурбинного двигателя.
4. Система управления по п. 3, в которой указанный по меньшей мере один датчик давления расположен возле заднего конца обтекателя внутреннего контура газотурбинного двигателя.
5. Система управления по п. 1, в которой вторичные данные включают в себя данные, характеризующие механическое напряжение лопасти вентилятора газотурбинного двигателя.
6. Система управления по п. 5, в которой вторичная система включает в себя по меньшей мере один тензодатчик, выполненный с возможностью определения механического напряжения лопасти вентилятора газотурбинного двигателя.
7. Система управления по п. 6, в которой указанный по меньшей мере один тензодатчик содержит волоконно-оптический тензодатчик, расположенный на лопасти вентилятора газотурбинного двигателя.
8. Система управления по п. 1, в которой модуль управления также выполнен с возможностью определения переходного режима работы газотурбинного двигателя на основании вторичных данных.
9. Система управления по п. 8, в которой модуль управления также выполнен с возможностью отправки сигнала для предупреждения членов экипажа летательного аппарата о переходном режиме работы.
10. Система управления по п. 8, в которой модуль управления также выполнен с возможностью перемещения указанного множества створок в положение безотказной работы, когда вторичные данные указывают на переходный режим работы.
11. Летательный аппарат, содержащий:
газотурбинный двигатель;
вентиляторное сопло с изменяемым сечением, установленное на дальнем по потоку конце газотурбинного двигателя и включающее в себя множество створок и по меньшей мере один привод, выполненный с возможностью перемещения указанного множества створок; и
систему управления, имеющую оперативную связь с газотурбинным двигателем и вентиляторным соплом с изменяемым сечением и включающую в себя:
по меньшей мере один датчик давления, выполненный с возможностью определения противодавления газотурбинного двигателя;
по меньшей мере один тензодатчик, выполненный с возможностью определения механического напряжения лопасти вентилятора газотурбинного двигателя; и
модуль управления, имеющий оперативную связь с указанным по меньшей мере одним датчиком давления, указанным по меньшей мере одним тензодатчиком, и
первичную систему, выполненную с возможностью сбора первичных данных, характеризующих рабочий режим вентиляторного сопла с изменяемым сечением, при этом модуль управления выполнен с возможностью:
вычисления площади сечения вентиляторного сопла с изменяемым сечением в реальном времени на основании по меньшей мере частично первичных данных,
выработки команды на привод на основании по меньшей мере частично указанной площади сечения в реальном времени и заданной таблицы площадей сечения, предварительно заложенной в виде программы в запоминающее устройство модуля управления,
изменения команды на привод на основе определенного противодавления и/или определенного механического напряжения лопасти вентилятора и
отправки измененной команды на привод на указанный по меньшей мере один привод вентиляторного сопла с изменяемым сечением для корректирования указанного множества створок.
12. Летательный аппарат по п. 11, в котором указанный по меньшей мере один датчик давления содержит лидарный датчик давления и/или трубку Пито.
13. Летательный аппарат по п. 11, в котором модуль управления реализован с помощью средств электронного управления двигателем и блока управления вентиляторным соплом с изменяемым сечением.
14. Летательный аппарат по п. 13, в котором модуль управления включает в себя устройство управления на основе модели, выполненное с возможностью оценки площади сечения вентиляторного сопла с изменяемым сечением, когда первичные данные недоступны.
15. Летательный аппарат по п. 14, в котором устройство управления на основе модели включает в себя обучающийся алгоритм для оценки площади сечения сопла на основании входных сигналов, подаваемых в средства электронного управления двигателем.
16. Летательный аппарат по п. 15, в котором модуль управления также выполнен с возможностью определения переходного режима работы газотурбинного двигателя, если площадь сечения, полученная в результате оценки от устройства управления на основе модели, находится за пределами заданного запаса вычисленной площади сечения, определенной блоком управления вентиляторным соплом с изменяемым сечением.
17. Способ управления площадью сечения вентиляторного сопла, имеющего множество створок и изменяемое сечение, для использования указанного сопла с газотурбинным двигателем, включающий:
сбор первичных данных, характеризующих рабочий режим вентиляторного сопла с изменяемым сечением;
сбор вторичных данных, характеризующих противодавление и механическое напряжение лопасти вентилятора газотурбинного двигателя;
вычисление площади сечения вентиляторного сопла с изменяемым сечением на основании первичных данных;
выработку необходимой площади сечения сопла на основании по меньшей мере частично заданной таблицы площадей сечения;
получение команды на привод на основе разности между вычисленной площадью сечения и необходимой площадью сечения сопла;
корректирование команды на привод на основании вторичных данных и
отправку откорректированной команды на привод на вентиляторное сопло с изменяемым сечением для перемещения указанного множества створок, при этом указанные вычисление, выработку, получение, корректирование и отправку выполняют модулем управления, связанным с вентиляторным соплом с изменяемым сечением и газотурбинным двигателем.
18. Способ по п. 17, также включающий изучение площади сечения вентиляторного сопла с изменяемым сечением на основе входных сигналов, подаваемых в средства электронного управления двигателем газотурбинного двигателя, при этом изучение выполняют посредством устройства управления на основе модели, содержащегося в модуле управления.
19. Способ по п. 17, также включающий использование вторичных данных для определения переходного режима работы газотурбинного двигателя.
20. Способ по п. 19, также включающий предупреждение членов экипажа летательного аппарата о переходном режиме работы и перемещение указанного множества створок вентиляторного сопла с изменяемым сечением в положение безотказной работы при определении переходного режима работы.
| US 8733080 B2, 27.05.2014 | |||
| US 9021813 B2, 05.05.2015 | |||
| Машина для динамической балансировки коленчатых валов, роторов и т. п. | 1950 |
|
SU101736A1 |
| ПИЛОН ГАЗОТУРБИННОГО ДВИГАТЕЛЯ В СБОРЕ И СИСТЕМА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2522208C1 |

