Изобретение относится к электротехнике, в частности к электромагнитным ударным машинам с возвратно-поступательным движением рабочих органов, используемых для выполнения различных технологических операций при импульсной обработке или разрушении материалов.
Известен электромагнитный двигатель возвратно-поступательного движения [А.с. 751614 СССР, МКл B25D 13/00. Электромагнитный молоток / Б.М. Борисов, К.А. Штаф, Е.П. Акулинин. - №2539478/25-28; заявл. 03.11.77; опубл. 30.07.80, Бюлл. №28 - 2 с], содержащий корпус, расположенные в нем катушка с магнитопроводом, направляющая втулка с размещенным в ней бойком, взаимодействующим с буфером и хвостовиком ударного инструмента, механизм возврата бойка и устройство крепления рабочего инструмента.
К недостаткам этого устройства следует отнести нарушения в синхронизации режима вынужденных колебаний бойка при потере контакта рабочего инструмента с обрабатываемой средой, что отражается на снижении производительности электромагнитного молотка.
Известен электромагнитный двигатель возвратно-поступательного движения [Пат. 2111847, B25D 13/00. Электромагнитная машина ударного действия / Г.Г. Угаров, В.Ю. Нейман. - №96117459/28; заявл. 27.08.96; опубл. 27.05.98 - 4 с.], содержащая корпус, с размещенными в нем магнитопроводом с катушкой, подпружиненную направляющую втулку, внутри которой установлены возвратная пружина и боек, взаимодействующий с буфером и хвостовиком рабочего инструмента, установленным в устройстве крепления рабочего инструмента.
Недостатком данного устройства является то, что жесткость возвратной пружины бойка, величина которой выбирается минимальной из условия гарантированного возврата бойка в исходное положение, не в полной мере обеспечивает режим вынужденных колебаний механической системы при обработке материала с различной степенью твердости, что приводит к нарушению синхронной работы электромагнитной машины и снижению ее производительности.
Известен электромагнитный двигатель возвратно-поступательного движения [А.с. 308690 СССР, МКл H02K 33/12. Электрический двигатель возвратно-поступательного движения / В.М. Верховцев, Н.П. Ряшенцев, В.Л. Шерман. - №1403538/24-7; заявл. 11.02.70; опубл. 15.08.75, Бюлл. №30 - 2 с.], содержащий немагнитный корпус, выполненный за одно с устройством крепления хвостовика рабочего инструмента, расположенные внутри немагнитного корпуса магнитопровод с катушками прямого и обратного хода и размещенный внутри направляющей втулки боек, который взаимодействует с хвостовиком рабочего инструмента и подпружиненным буфером.
К недостаткам этого технического решения следует отнести зависимость цикличности работы электромагнитного двигателя от величины коэффициента отскока бойка при обработке материалов с переменной степенью твердости, что отражается на производительности всего устройства в целом.
Наиболее близким по технической сущности предлагаемому полезной модели является электромагнитный двигатель возвратно-поступательного движения [Пат. 2496215 H02K 33/12, F16F 7/104. Электромагнитный двигатель возвратно-поступательного движения / Л.А. Нейман, В.Ю. Нейман, А.А. Скотников. - №2012106101/07; заявл. 20.12.2012; опубл. 20.10.2013, Бюлл. №29 - 7 с.], содержащий немагнитный корпус с размещенными в нем магнитопроводом с катушками прямого и обратного хода, размещенный внутри направляющей втулки боек с возможностью взаимодействия с подпружиненным буфером и хвостовиком рабочего инструмента, примыкающее к немагнитному корпусу устройство крепления хвостовика рабочего инструмента, выполненное в виде полого цилиндра, внутри которого установлен подпружиненный упругим звеном демпфирующий сердечник, подвижно связанный с хвостовиком рабочего инструмента. При этом расстояние между обращенными в сторону бойка торцевыми поверхностями демпфирующего сердечника и хвостовика рабочего инструмента в начальном положение равно амплитуде рабочего хода последнего.
Данное техническое решение принимается в качестве прототипа.
Одним из основных недостатков известного технического решения является снижение производительности и надежности электромагнитного двигателя в процессе длительной эксплуатации.
Связано это с возможными потерями упругих свойств подпружиненного демпфирующего сердечника, вызванными изменениями механических свойств материала упругого элемента по мере его старения с течением времени продолжительности эксплуатации, а также изменениями допусков размеров взаимодействующих между собой элементов конструкции двигателя вследствие их механического износа.
При этом техническая возможность точной настройки механической системы для поддержания режима вынужденных колебаний бойка в случае потери контакта рабочего инструмента с обрабатываемой средой и обработке материала различной степени твердости в электромагнитном двигателе не предусмотрена.
Техническим результатом предлагаемого решения является увеличение производительности электромагнитного двигателя при одновременном повышении его надежности при обработке материала с различной степенью твердости или при потере контакта рабочего инструмента с обрабатываемой средой за счет использования технической возможности точной настройки механической системы для поддержания режима вынужденных колебаний механической системы в случае потери контакта рабочего инструмента с обрабатываемой средой или при обработке материала различной степени твердости.
Поставленная задача решается тем, что в электромагнитном двигателе возвратно-поступательного движения, содержащем немагнитный корпус с расположенными в нем магнитопроводом с катушками прямого и обратного хода, размещенный внутри направляющей втулки боек с возможностью взаимодействия с подпружиненным буфером и с хвостовиком рабочего инструмента, выполненным в виде полого цилиндра, внутри которого установлен подпружиненный в сторону бойка демпфирующий сердечник, подвижно связанный с хвостовиком рабочего инструмента, при чем расстояние между обращенными в сторону бойка торцевыми поверхностями демпфирующего сердечника и хвостовика рабочего инструмента равно амплитуде рабочего хода последнего при этом устройство крепления хвостовика рабочего инструмента выполнено из двух сопрягаемых по диаметру составных частей в виде полого цилиндра и связанного с ним при помощи резьбового соединения фланца, взаимодействующего через упругий элемент с подпружиненным демпфирующим сердечником.
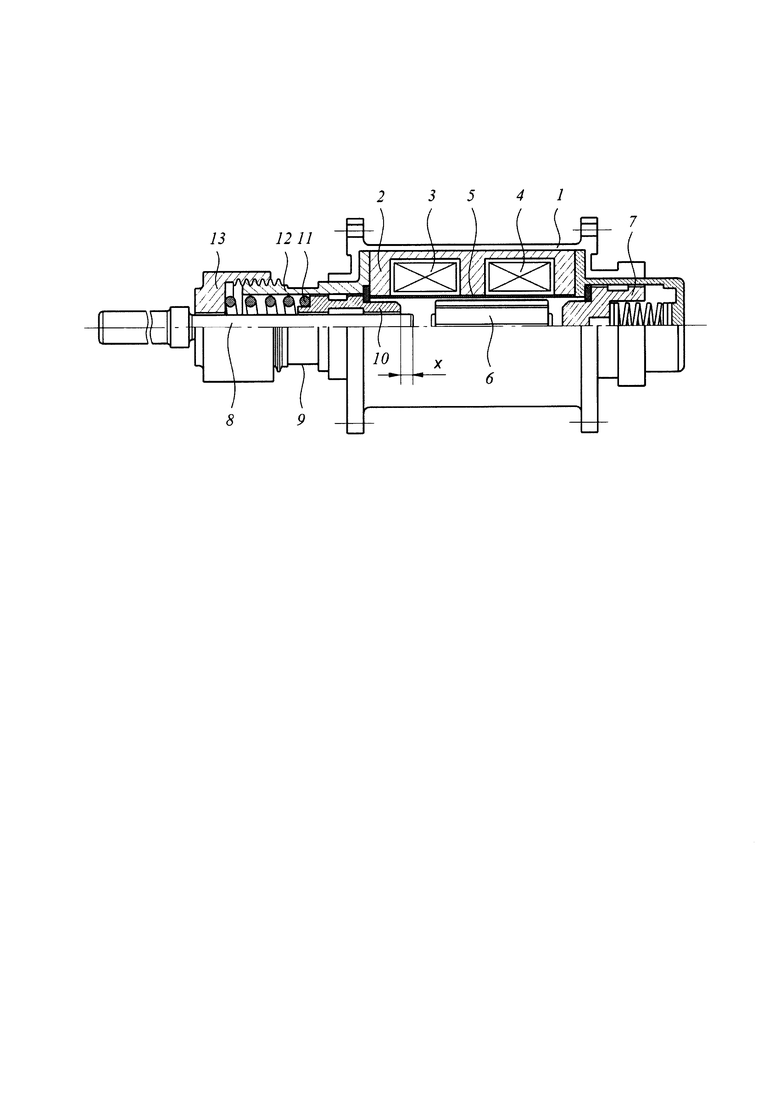
На чертеже представлен предлагаемый электромагнитный двигатель возвратно-поступательного движения.
Электромагнитный двигатель возвратно-поступательного движения содержит немагнитный корпус 1 с размещенными в нем магнитопроводом 2 с катушками прямого 3 и обратного 4 хода и направляющую втулку 5, с установленным в ней бойком 6, взаимодействующим с подпружиненным буфером 7 и хвостовиком рабочего инструмента 8.
Со стороны, противоположной подпружиненному буферу 7, к магнитопроводу 2 примыкает устройство крепления 9 хвостовика рабочего инструмента 8, внутри которого с возможностью осевого перемещения установлен демпфирующий сердечник 10, подпружиненный в сторону бойка 6 упругим элементом 11. В центре демпфирующего сердечника 10 выполнено сквозное отверстие, диаметр которого обеспечивает свободное вхождение хвостовика рабочего инструмента 8, выступающего относительно демпфирующего сердечника 10 сторону бойка 6, при чем расстояние между обращенными в сторону бойка 6 торцевыми поверхностями демпфирующего сердечника 10 и хвостовика рабочего инструмента 8 равно амплитуде рабочего хода последнего. Устройство крепления 9 хвостовика рабочего инструмента 8 выполнено из двух сопрягаемых по диаметру составных частей в виде полого цилиндра 12 и связанного с ним при помощи резьбового соединения фланца 13, взаимодействующего через упругий элемент 11 с демпфирующим сердечником 10.
Электромагнитный двигатель работает следующим образом.
В исходном положении при контакте рабочего инструмента с обрабатываемой средой хвостовик рабочего инструмента 8 поджат в сторону бойка 6.
При подаче импульса напряжения на катушку 4 обратного хода под действием электромагнитных сил боек 6 перемещается в сторону подпружиненного буфера 7 и сжимает его. С отключением катушки 4 обратного хода импульс напряжения подается на катушку 3 прямого хода и под действием электромагнитных сил катушки 3 прямого хода и упругих сил подпружиненного буфера 7 боек 6 перемещается в сторону хвостовика рабочего инструмента 8 и наносит по нему удар. После нанесения удара и отскока бойка 6 от хвостовика рабочего инструмента 8 одновременно подается импульс напряжения на катушку 4 обратного хода.
Далее цикл повторяется, и боек 6 совершает цикличные возвратно-поступательные движения.
Одновременно с бойком 6 колебательные движения получает хвостовик рабочего инструмента 8, скользящий по свободной посадке внутри сквозного отверстия демпфирующего сердечника 10, который остается неподвижным, так как амплитуда колебаний хвостовика рабочего инструмента 8 не превышает расстояния, равного X, демпфирующий сердечник 10 остается неподвижным.
При уменьшении твердости обрабатываемой среды амплитуда колебаний хвостовика рабочего инструмента 8 будет возрастать. Когда амплитуда колебаний хвостовика рабочего инструмента 8 превысит расстояние, равное X, колебательные движения от соударения с бойком 6 частично будут передаваться подпружиненному демпфирующему сердечнику 10.
При временной потере контакта рабочего инструмента с обрабатываемой средой кинетическая энергия бойка 6 передается подпружиненному демпфирующему сердечнику 10. При этом цикличность работы двигателя не нарушается, а требуемый для поддержания режима вынужденных колебаний коэффициент отскока бойка 6 обеспечивается заданными упругими свойствами подпружиненного демпфирующего сердечника 10.
Для повышения точности настройки механической системы для поддержания режима вынужденных колебаний бойка 6 с помощью поворота фланца 13, связанного через резьбовое соединение с полым цилиндром 12, можно изменять упругие свойства подпружиненного демпфирующего сердечника 10, ослабляя или усиливая его поджатие, ослабляя или усиливая величину поджатая упругого элемента 13.
Таким образом, предложенное техническое решение позволяет повысить точность настройки механической системы для поддержания режима вынужденных колебаний бойка и тем самым увеличить производительность электромагнитного двигателя при одновременном повышении его надежности при обработке материала с различной степенью твердости или при потере контакта рабочего инструмента с обрабатываемой средой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496215C1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |
| СИНХРОННАЯ ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 2012 |
|
RU2508980C2 |
| СИНХРОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496214C2 |
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ МЕХАНИЗМ | 2012 |
|
RU2502855C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАТУШЕЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2486656C1 |
| СИНХРОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ МЕХАНИЗМ | 2011 |
|
RU2491701C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАТУШЕЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2472243C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2455145C1 |
| Электродвигатель возвратно-поступательного движения | 1989 |
|
SU1721740A1 |
Изобретение относится к электротехнике, в частности к электромагнитным ударным машинам с возвратно-поступательным движением рабочих органов. Технический результат - увеличение производительности электромагнитного двигателя, повышение его надежности. Электромагнитный двигатель возвратно-поступательного движения содержит немагнитный корпус с расположенным в нем магнитопроводом с катушками прямого и обратного хода, размещенный внутри направляющей втулки боек с возможностью взаимодействия с подпружиненным буфером и с хвостовиком рабочего инструмента, выполненным в виде полого цилиндра, внутри которого установлен подпружиненный в сторону бойка демпфирующий сердечник, подвижно связанный с хвостовиком рабочего инструмента. Расстояние между обращенными в сторону бойка торцевыми поверхностями демпфирующего сердечника и хвостовика рабочего инструмента равно амплитуде рабочего хода последнего. Устройство крепления хвостовика рабочего инструмента выполнено из двух сопрягаемых по диаметру частей в виде полого цилиндра и связанного с ним при помощи резьбового соединения фланца, взаимодействующего через упругий элемент с подпружиненным демпфирующим сердечником. 1 ил.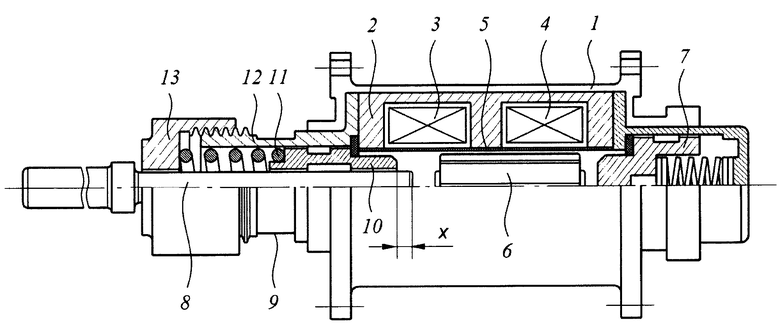
Электромагнитный двигатель возвратно-поступательного движения, содержащий немагнитный корпус с расположенными в нем магнитопроводом с катушками прямого и обратного хода, размещенный внутри направляющей втулки боек с возможностью взаимодействия с подпружиненным буфером и с хвостовиком рабочего инструмента, выполненным в виде полого цилиндра, внутри которого установлен подпружиненный демпфирующий сердечник, подвижно связанный с хвостовиком рабочего инструмента, причем расстояние между обращенными в сторону бойка торцевыми поверхностями демпфирующего сердечника и хвостовика рабочего инструмента равно амплитуде рабочего хода последнего, отличающийся тем, что устройство крепления хвостовика рабочего инструмента выполнено из двух сопрягаемых по диаметру составных частей в виде полого цилиндра и связанного с ним при помощи резьбового соединения фланца, взаимодействующего через упругий элемент с подпружиненным демпфирующим сердечником.
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496215C1 |
| Электрический двигатель возвратно-поступательного движения | 1970 |
|
SU308690A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |
| Электромагнитный молоток | 1977 |
|
SU751614A1 |
| US 3201670 A1, 17.08.1965 | |||
| Устройство для термического удаления заусенцев | 1984 |
|
SU1756053A1 |

