Изобретение относится к электротехнике, а именно к управлению электрическими машинами, и может быть использовано в устройствах ударного действия с линейным электромагнитным двигателем, в котором возвратно-поступательное движение бойка осуществляется за счет катушек рабочего и холостого хода, питающихся от однофазного источника.
Известен способ управления двухкатушечным электромагнитным двигателем возвратно-поступательного движения [А.с. 1403327 СССР, М. Кл. Н02Р 7/62. Способ питания электромагнитного двигателя возвратно-поступательного действия. / В.Н.Ряшенцев, Н.П.Ряшенцев, А.Н.Ряшенцев. - №3511325/24-07; заявл. 12.11.82; опубл. 15.06.88, Бюл. №22. - 4 с], состоящий в поочередной подаче импульсов питающего напряжения на катушки рабочего и холостого хода с паузой между ними. При этом подключение катушек рабочего и холостого хода двигателя к источнику питания осуществляется на время, меньшее длительности движения якоря под действием электромагнитных сил катушек рабочего и холостого хода.
Недостатком этого способа управления является относительно низкая энергия единичного удара бойка, обусловленная тем, что за рабочий цикл осуществляется подача двух импульсов питающего напряжения на катушки рабочего и холостого хода с паузой между импульсами питающего напряжения, в течение которой боек движется за счет накопленной электромагнитной энергии.
Наиболее близок по технической сущности к предлагаемому изобретению способ управления двухкатушечным электромагнитным двигателем возвратно-поступательного движения [А.с. 1525856 СССР, М. Кл. Н02Р 7/62. Способ управления двухкатушечным электромагнитным двигателем. / А.А.Перьев, Е.М.Тимошенко, А.Л.Осокин, В.М.Борисов. - №4104981/24-07; заявл. 30.05.86; опубл. 30.11.89, Бюл. №44. - 3 с.], состоящий в поочередной подаче полуволн питающего напряжения различной полярности на катушки прямого и холостого хода, при этом за время полного рабочего цикла первую полуволну питающего напряжения подают на катушку рабочего хода, вторую полуволну питающего напряжения - на катушку холостого хода, третью полуволну питающего напряжения - на катушку рабочего хода, а после паузы в течение нечетного числа полуволн повторяют указанную последовательность подачи импульсов напряжения на катушки. Отличительной особенностью этого способа управления является то, что за время рабочего цикла боек получает кинетическую энергию за три импульса питающего напряжения: два раза кинетическая энергия увеличивается за счет электромагнитной энергии катушки рабочего хода и один раз - за счет электромагнитной энергии катушки холостого хода.
Недостатком этого способа управления является относительно низкая энергия единичного удара бойка, обусловленная тем, что за время рабочего цикла боек приобретает кинетическую энергию за три импульса питающего напряжения.
Изобретение направлено на увеличение энергии единичного удара бойка.
Поставленная задача решается тем, что в предлагаемом способе управления двухкатушечным электромагнитным двигателем возвратно-поступательного движения, состоящем в подаче на катушку рабочего хода полуволн питающего напряжения одной полярности, а на катушку холостого хода - полуволн питающего напряжения другой полярности, при этом первую полуволну питающего напряжения подают на катушку рабочего хода, вторую и четвертую полуволны питающего напряжения с паузой между ними - на катушку холостого хода, пятую полуволну питающего напряжения - на катушку рабочего хода, а после паузы в течение нечетного числа полуволн питающего напряжения повторяют указанную последовательность подачи импульсов питающего напряжения на катушки.
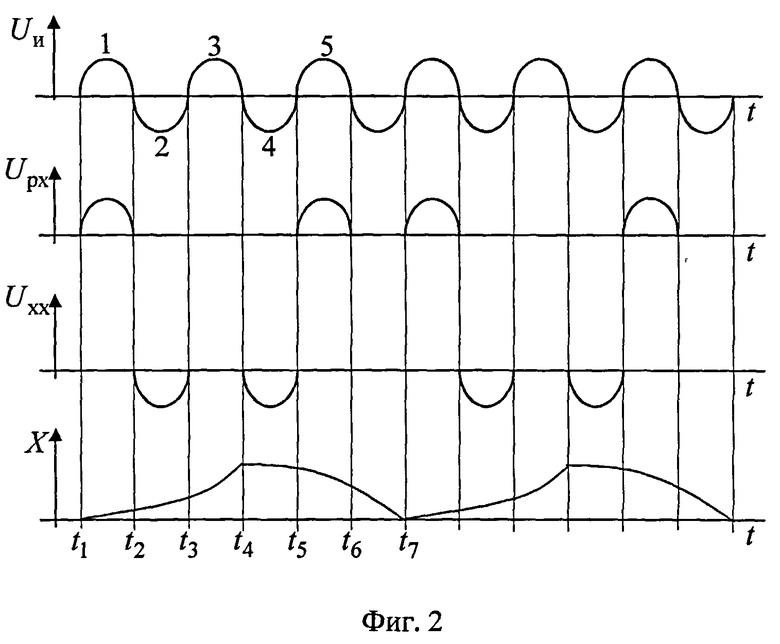
В качестве примера реализации предлагаемого способа управления на фиг.1 показан двухкатушечный электромагнитный двигатель возвратно-поступательного движения, а на фиг.2 - временные диаграммы работы двигателя.
Двухкатушечный электромагнитный двигатель возвратно-поступательного движения (фиг.1) содержит магнитопровод 1 с катушкой 2 рабочего хода и катушкой 3 обратного хода, направляющую втулку 4 с бойком 5, установленным с возможностью поочередного взаимодействия с рабочим инструментом 6 и подпружиненным буфером 7.
На фиг.2 показаны временные диаграммы питающего источника переменного напряжения Uи, напряжения на катушке рабочего хода Upx, напряжения на катушке холостого хода Uxx, X - перемещение бойка (нижняя точка на кривой перемещения соответствует положению бойка в момент его контакта с рабочим инструментом, верхняя точка - положению бойка в конце холостого хода).
На интервале времени t1…t4 осуществляется холостой ход бойка, на интервале t4…t7 - рабочий ход бойка.
Предлагаемый способ управления осуществляется следующим образом.
В момент времени t1 на катушку 2 рабочего хода подают полуволну питающего напряжения и боек 5 под действием электромагнитных сил, создаваемых катушкой 2 рабочего хода, перемещается по направляющей втулке 4 в сторону подпружиненного буфера 7. В результате перемещения бойка 5 в катушке 3 холостого хода образуется рабочий воздушный зазор. В момент времени t2 подается импульс питающего напряжения на катушку 3 холостого хода и боек 5 под действием электромагнитных сил катушки 3 холостого хода получает дополнительное ускорение и продолжает движение по направляющей втулке 4 в направлении подпружиненного буфера 7.
В период паузы между полуволнами питающего напряжения на интервале t3…t4 боек 5, двигаясь по инерции, сжимает подпружиненный буфер 7, останавливается и изменяет направление движение на противоположное.
В момент времени t4 повторно подается полуволна питающего напряжения на катушку 3 холостого хода и боек 5 под действием электромагнитных сил катушки 3 холостого хода и накопленной потенциальной энергии подпружиненного буфера 7 ускоренно перемещается по направлению к рабочему инструменту 6.
Для обеспечения способа управления повторная подача полуволны питающего напряжения на катушку 3 холостого хода осуществляется после паузы через одну положительную полуволну питающего напряжения, в результате чего боек 5 имеет возможность пройти точку магнитного равновесия и создать рабочий воздушный зазор в катушке 3 холостого хода с противоположной подпружиненному буферу 7 стороны.
В момент времени t5 подается полуволна питающего напряжения на катушку 2 рабочего хода, под действием электромагнитных сил которой, боек 5, получая дополнительное ускорение, движется в направлении рабочего инструмента 6.
В момент времени t7 боек 5 наносит удар по рабочему инструменту 6 и отскакивает от него в направлении подпружиненного буфера 7, после чего цикл повторяется. Каждый последующий цикл после нечетного числа полуволн питающего напряжения осуществляется с паузой между циклами.
В данном способе управления повторная подача полуволны питающего напряжения на катушку 2 рабочего хода в начале каждого нового цикла осуществляется после паузы, в результате чего боек 5 имеет возможность пройти точку магнитного равновесия и создать рабочий воздушный зазор с противоположной рабочему инструменту 6 стороны.
Таким образом, в определенной последовательности на катушку 2 рабочего хода подают полуволны питающего напряжения одной полярности, а на катушку 3 холостого хода - другой полярности.
Для осуществления запуска электромагнитного двигателя возвратно-поступательного движения, работающего в соответствии с предлагаемым способом управления, необходимо определенное чередование в подаче полуволн питающего напряжения и выдерживания паузы между ними, а именно: первую положительную полуволну питающего напряжения подают на катушку 2 рабочего хода, вторую и четвертую отрицательные полуволны питающего напряжения с паузой между ними подают на катушку 3 холостого хода, пятую положительную полуволну питающего напряжения - на катушку 2 рабочего хода, а после паузы в течение нечетного числа полуволн питающего напряжения повторяют указанную последовательность подачи импульсов питающего напряжения на катушки.
Таким образом, за время рабочего цикла боек получает кинетическую энергию за четыре импульса питающего напряжения вместо трех в прототипе. Два раза кинетическая энергия бойка увеличивается за счет электромагнитной энергии катушки рабочего хода и два раза за счет электромагнитной энергии катушки холостого хода.
Предлагаемый способ управления двухкатушечным электромагнитным двигателем возвратно-поступательного движения позволяет повысить энергию единичного удара бойка.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАТУШЕЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2472243C1 |
| Способ управления двухкатушечным электромагнитным двигателем | 1986 |
|
SU1525856A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496215C1 |
| СИНХРОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496214C2 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU959250A1 |
| СИНХРОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ МЕХАНИЗМ | 2011 |
|
RU2491701C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2019 |
|
RU2726336C1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |
| СИНХРОННАЯ ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 2012 |
|
RU2508980C2 |
| Электропривод ударного действия | 1987 |
|
SU1640809A1 |
Изобретение относится к области электротехники и может быть использовано в устройствах ударного действия с линейным электромагнитным двигателем, в котором возвратно-поступательное движение бойка осуществляется за счет катушек рабочего и холостого хода, питающихся от однофазного источника. Техническим результатом является повышение энергии единичного удара бойка. Способ управления двухкатушечным электромагнитным двигателем возвратно-поступательного движения состоит в подаче на катушку рабочего хода полуволн питающего напряжения одной полярности, а на катушку холостого хода - полуволн питающего напряжения другой полярности. При этом первую полуволну питающего напряжения подают на катушку рабочего хода, вторую и четвертую полуволны питающего напряжения с паузой между ними - на катушку холостого хода, пятую полуволну питающего напряжения - на катушку рабочего хода, а после паузы в течение нечетного числа полуволн питающего напряжения повторяют указанную последовательность подачи импульсов питающего напряжения на катушки. Следовательно, за время рабочего цикла боек получает кинетическую энергию за четыре импульса питающего напряжения: два раза кинетическая энергия бойка увеличивается за счет электромагнитной энергии катушки рабочего хода и два раза за счет электромагнитной энергии холостого хода. 2 ил.
Способ управления двухкатушечным электромагнитным двигателем возвратно-поступательного движения, состоящий в подаче на катушку рабочего хода полуволн питающего напряжения одной полярности, а на катушку холостого хода - полуволн питающего напряжения другой полярности, отличающийся тем, что первую полуволну питающего напряжения подают на катушку рабочего хода, вторую и четвертую полуволны питающего напряжения с паузой между ними - на катушку холостого хода, пятую полуволну питающего напряжения - на катушку рабочего хода, а после паузы в течение нечетного числа полуволн питающего напряжения повторяют указанную последовательность подачи импульсов питающего напряжения на катушки.
| СПОСОБ УПРАВЛЕНИЯ ОДНООБМОТОЧНЫМ ЛИНЕЙНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ УДАРНОГО ДЕЙСТВИЯ | 1995 |
|
RU2127017C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ЭЛЕКТРОМАГНИТНОГО СИЛОВОГО ПРИВОДА | 2009 |
|
RU2402859C1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД С ИМПУЛЬСНЫМ УПРАВЛЕНИЕМ | 2001 |
|
RU2234789C2 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1987 |
|
SU1577064A1 |
| Способ управления двухкатушечным электромагнитным двигателем | 1986 |
|
SU1525856A1 |
| US 6661636 B2, 09.12.2003 | |||
| ВЫСОТНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА И СПОСОБ ЕЕ ВОЗВЕДЕНИЯ | 1997 |
|
RU2120011C1 |

