Область техники, к которой относится изобретение
[0001] Это изобретение относится к способу управления для двигателя внутреннего сгорания, выполненного с возможностью изменять степень сжатия, и устройству управления для двигателя внутреннего сгорания, выполненного с возможностью изменять степень сжатия.
Уровень техники
[0002] Например, патентные документы 1 и 2 описывают уровень техники, чтобы ограничивать величину изменения целевой степени сжатия, когда степень сжатия изменяется в двигателе внутреннего сгорания, выполненном с возможностью изменять степень сжатия, и, таким образом, избегать резкого изменения крутящего момента и ухудшения характеристики движения.
[0003] В этом случае, когда выполняется приведение в действие, в котором повторяется отпускание нажатия педали акселератора, целевая степень сжатия изменяется вследствие изменения нагрузки. Т.е., целевая степень сжатия многократно уменьшается и увеличивается от высокой степени сжатия до низкой степени сжатия и от низкой степени сжатия до высокой степени сжатия. В это время, когда величина изменения целевой степени сжатия ограничивается, как раскрыто в патентных документах 1 и 2, отклонение между целевой степенью сжатия и фактической степенью сжатия пресекается. Соответственно, представляется возможным уменьшать потребление мощности мотора, выполненного с возможностью приводить в действие механизм переменной степени сжатия.
[0004] Кроме того, в случае, когда механизм переменной степени сжатия является многозвенным поршневым кривошипно-шатунным механизмом, состоящим из множества звеньев, связывающих поршень и коленчатый вал, нагрузка от сгорания воздействует в направлении прижатия поршня в направлении вниз. Соответственно, скорость отклика при изменении степени сжатия в сторону низкой степени сжатия выше скорости отклика при изменении степени сжатия в сторону высокой степени сжатия. Таким образом, в случае, когда скорость отклика механизма переменной степени сжатия при изменении в сторону низкой степени сжатия отличается от скорости отклика механизма переменной степени сжатия при изменении в сторону высокой степени сжатия, например, когда величина изменения целевой степени сжатия ограничивается в соответствии со стороной высокой степени сжатия, на которой скорость отклика становится ниже, изменение в сторону низкой степени сжатия ограничивается относительно обычной величины изменения. Следовательно, отклик ухудшается.
Документ предшествующего уровня техники
Патентный документ
[0005] Патентный документ 1: Публикация японской патентной заявки № 2013-79607
Патентный документ 2: Публикация японской патентной заявки № 2005-9366
Сущность изобретения
[0006] В настоящем изобретении способ управления для двигателя внутреннего сгорания, включающего в себя механизм переменной степени сжатия, который является многозвенным поршневым кривошипно-шатунным механизмом, выполненным с возможностью изменять степень сжатия, способ управления включает в себя установление скорости отклика в сторону низкой степени сжатия выше скорости отклика в сторону высокой степени сжатия.
[0007] В настоящем изобретении изменение в сторону низкой степени сжатия изменяется со скоростью отклика выше скорости отклика для стороны высокой степени сжатия, без соответствия скорости отклика для стороны высокой степени сжатия. Соответственно, представляется возможным пресекать ухудшение.
Краткое описание чертежей
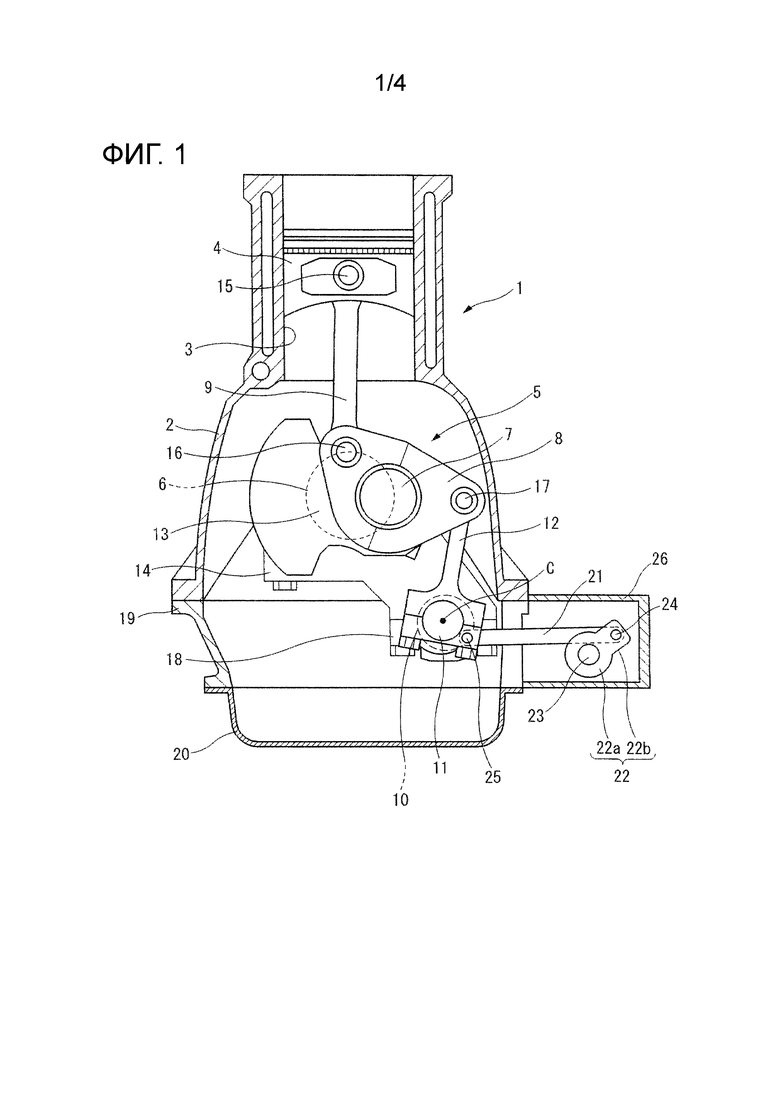
[0008] Фиг. 1 - это пояснительный вид, схематично показывающий двигатель внутреннего сгорания, к которому применяется настоящее изобретение.
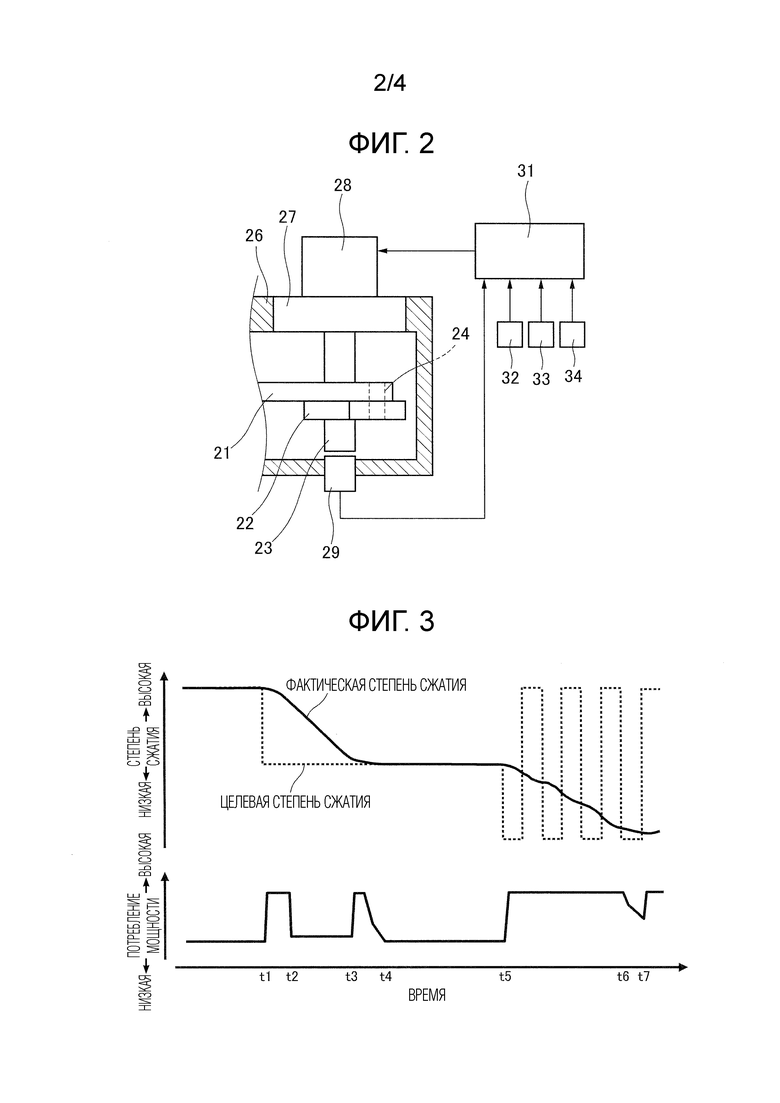
Фиг. 2 - это пояснительный вид, схематично показывающий источник приведения в действие механизма переменной степени сжатия, к которому применяется настоящее изобретение.
Фиг. 3 - это временная диаграмма, показывающая один пример в случае, когда механизм переменной степени сжатия управляется без учета ограничения способности фактической степени сжатия придерживаться относительно целевого значения.
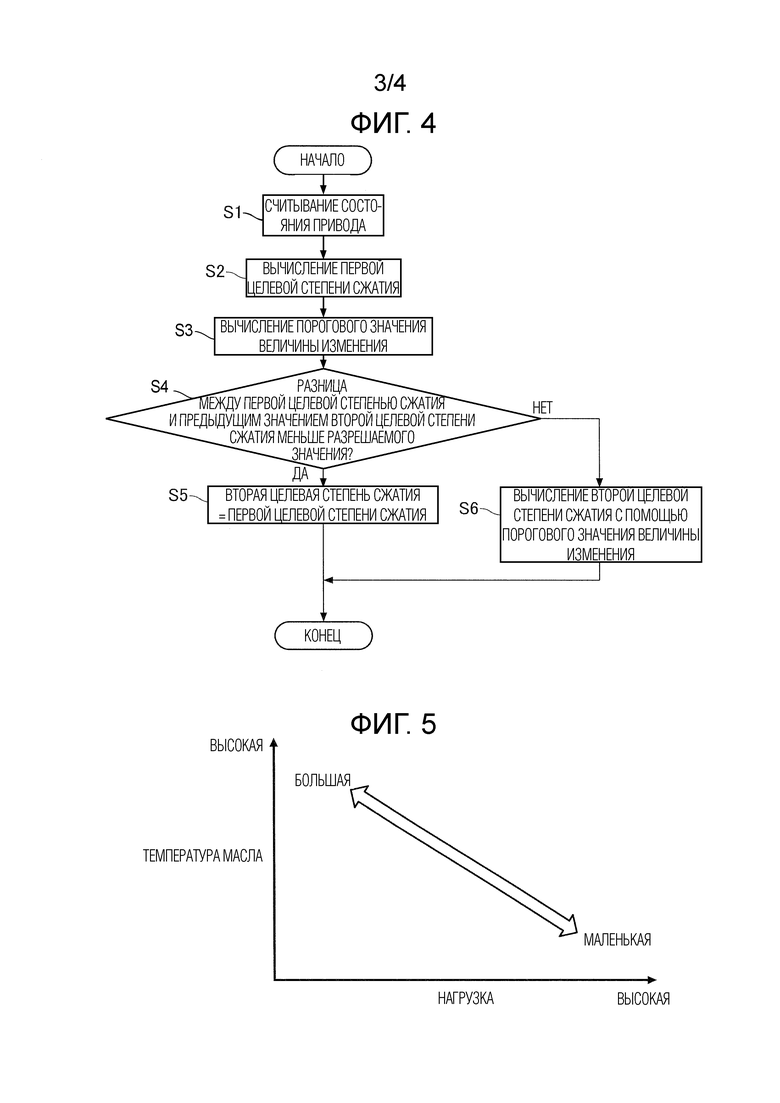
Фиг. 4 - это блок-схема последовательности операций, показывающая последовательность операций управления двигателем внутреннего сгорания согласно настоящему изобретению.
Фиг. 5 - это пояснительный вид, показывающий контур карты, используемой для вычисления первого порогового значения величины изменения.
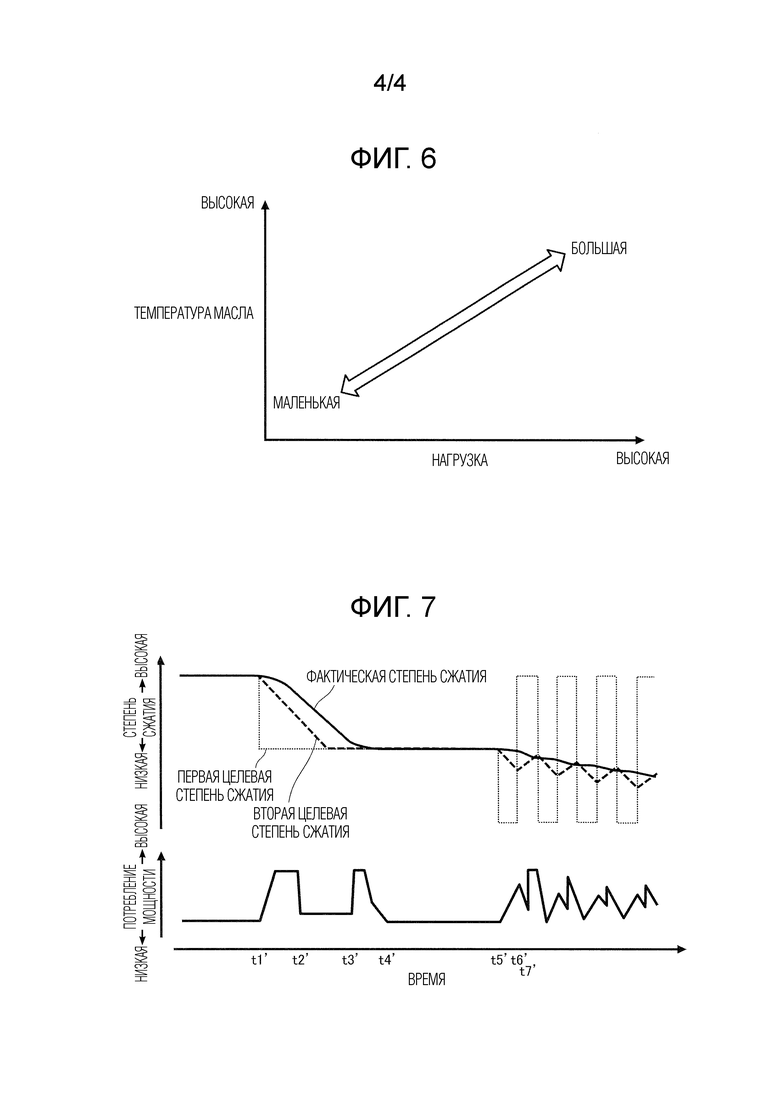
Фиг. 6 - это пояснительный вид, показывающий контур карты, используемой для вычисления второго порогового значения величины изменения.
Фиг. 7 - это временная диаграмма, показывающая один пример в случае, когда механизм переменной степени сжатия управляется с учетом ограничения способности фактической степени сжатия придерживаться относительно целевого значения.
Подробное описание вариантов осуществления
[0009] Далее в данном документе один вариант осуществления согласно настоящему изобретению объясняется подробно со ссылкой на чертежи, фиг. 1 является пояснительным видом, схематично показывающим схематичную конфигурацию двигателя 1 внутреннего сгорания, к которому применяется настоящее изобретение. Фиг. 2 - это пояснительный вид, схематично показывающий схематичную конфигурацию источника приведения в действие механизма 5 переменной степени сжатия двигателя 1 внутреннего сгорания, к которому применяется настоящее изобретение.
[0010] Как показано на фиг. 1, двигатель 1 внутреннего сгорания включает в себя механизм 5 переменной степени сжатия, выполненный с возможностью изменять позицию верхней мертвой точки поршня 4, выполняющего возвратно-поступательное движение в цилиндре 3 блока 2 цилиндров, составляющего основной корпус двигателя, и, тем самым, изменять степень сжатия двигателя.
[0011] Механизм 5 переменной степени сжатия является многозвенным поршневым кривошипно-шатунным механизмом, в котором поршень 4 и шатунная шейка 7 коленчатого вала 6 связываются посредством множества звеньев. Механизм 5 переменной степени сжатия включает в себя нижнее звено 8, установленное с возможностью вращения на шатунную шейку 7; верхнее звено 9, соединяющее это нижнее звено 8 и поршень 4; вал 10 управления, включающий в себя эксцентриковый фрагмент 11 вала; и управляющее звено 12, соединяющее эксцентриковый фрагмент 11 вала и нижнее звено 8.
[0012] Коленчатый вал 6 включает в себя множество коренных шеек 13 и шатунную шейку 7. Каждая из коренных шеек 13 поддерживается с возможностью вращения между блоком 2 цилиндров и консольной опорой 14 коренного подшипника.
[0013] Верхнее звено 9 включает в себя один конец, установленный с возможностью вращения на палец 15 поршня, и другой конец, соединенный с возможностью вращения с нижним звеном 8 посредством штифта 16 первого звена. Управляющее звено 12 включает в себя один конец, соединенный с возможностью вращения с нижним звеном 8 посредством штифта 17 второго звена; и другой конец, соединенный с возможностью вращения с эксцентриковым фрагментом 11 вала для вала 10 управления. Каждый из штифта 16 первого звена и штифта 17 второго звена прикрепляется к нижнему звену 8 посредством прессовой посадки.
[0014] Вал 10 управления располагается параллельно коленчатому валу 6. Кроме того, вал 10 управления поддерживается с возможностью вращения посредством блока 2 цилиндров. В частности, вал 10 управления поддерживается с возможностью вращения между консольной опорой 14 коренного подшипника и консольной опорой 18 подшипника вала управления.
[0015] Верхний масляный поддон 19 устанавливается на нижний фрагмент блока 2 цилиндров. Кроме того, нижний масляный поддон 20 устанавливается на нижний фрагмент верхнего масляного поддона 19.
[0016] Вращение приводного вала 23 передается через звено 21 исполнительного устройства и рычажный элемент 22 приводного вала валу 10 управления. Приводной вал 23 располагается снаружи верхнего масляного поддона 19 параллельно с валом 10 управления. Рычажный элемент 22 приводного вала прикрепляется к приводному валу 23 посредством прессовой посадки. Рычажный элемент 22 приводного вала включает в себя цилиндрический фрагмент 22a основания, который устанавливается с помощью прессовой посадки на приводной вал 23; и фрагмент 22b плеча рычага, протягивающийся от фрагмента 22a основания в радиально внешнем направлении фрагмента основания. Один конец звена 21 исполнительного устройства соединяется с возможностью вращения через элемент 24 штифта с фрагментом 22b плеча рычага рычажного элемента 22 приводного вала. Звено 21 исполнительного устройства является вытянутым стержневым по форме элементом, расположенным перпендикулярно валу 10 управления. Звено 21 исполнительного устройства включает в себя другой конец, соединенный с возможностью вращения через элемент 25 штифта с валом 10 управления в позиции, которая смещена от центра вращения вала 10 управления.
[0017] Приводной вал 23, рычажный элемент 22 приводного вала и одна торцевая сторона звена 21 исполнительного устройства принимаются в корпус 26, установленный на боковую поверхность верхнего масляного поддона 19.
[0018] Как показано на фиг. 2, приводной вал 23 включает в себя один конец, соединенный через устройство 27 снижения скорости с электромотором 28. Т.е., приводной вал 23 выполняется с возможностью вращаться с возможностью передачи приводного усилия посредством электромотора 28. Скорость вращения приводного вала 23 получается посредством уменьшения скорости вращения электромотора 28 посредством устройства 27 снижения скорости.
[0019] Когда приводной вал 23 вращается посредством приведения в действие электромотора 28, звено 21 исполнительного устройства выполняет возвратно-поступательное движение в плоскости, перпендикулярной приводному валу 23. Тогда позиция соединения между другим концом звена 21 исполнительного устройства и валом 10 управления колеблется в соответствии с возвратно-поступательным движением звена 21 исполнительного устройства, так что вал 10 управления вращается. Позиция при повороте вала 10 управления изменяется посредством вращения вала 10 управления, так, чтобы изменять позицию эксцентрикового фрагмента 11 вала, который является точкой опоры для колебания управляющего звена 12. Т.е., положение нижнего звена 8 изменяется посредством изменения позиции при вращении вала 10 управления посредством электромотора 28, так что степень сжатия двигателя 1 внутреннего сгорания непрерывно изменяется с движением поршня (характеристики хода) поршня 4, т.е., изменениями позиции верхней мертвой точки и позиции нижней мертвой точки поршня 4.
[0020] Электромотор 28 устанавливается на заднюю торцевую сторону корпуса 26. Датчик 29 угла поворота устанавливается на переднюю торцевую сторону корпуса 26. Датчик 29 угла поворота выполнен с возможностью определять угол поворота приводного вала 23.
[0021] Сигнал обнаружения датчика 29 угла поворота вводится в блок 31 управления. Блок 31 управления является известным цифровым компьютером, включающим в себя CPU, ROM, RAM и интерфейс ввода и вывода. Блок 31 управления принимает сигналы обнаружения от различных датчиков, таких как датчик 32 степени открытия акселератора, выполненный с возможностью определять величину нажатия педали акселератора (степень APO открытия акселератора), которая представляет желаемое состояние под нагрузкой двигателя 1 внутреннего сгорания, датчик 33 угла поворота коленчатого вала, выполненный с возможностью определять скорость вращения двигателя и угол поворота коленчатого вала 6, и датчик 34 температуры масла, выполненный с возможностью определять температуру масла двигателя 1 внутреннего сгорания.
[0022] Блок 31 управления выполнен с возможностью выводить управляющие сигналы клапану для впрыска топлива (не показан), свече зажигания (не показана), электромотору 28 механизма 5 переменной степени сжатия на основе сигналов, вводимых от этих различных датчиков, и т.д. Блок 31 управления выполнен с возможностью полностью управлять объемом впрыскиваемого топлива, моментом впрыска топлива, моментом зажигания, скоростью вращения двигателя, степенью сжатия и т.д.
[0023] Вышеописанный механизм 5 переменной степени сжатия является многозвенным поршневым кривошипно-шатунным механизмом, состоящим из множества звеньев, связывающих поршень 4 и коленчатый вал 6. Соответственно, нагрузка от сгорания воздействует в направлении толкания поршня 4 в направлении вниз. Следовательно, механизм 5 переменной степени сжатия настраивается так, что скорость отклика механизма 5 переменной степени сжатия при изменении степени сжатия в сторону низкой степени сжатия выше скорости отклика механизма 5 переменной степени сжатия при изменении степени сжатия в сторону высокой степени сжатия. Соответственно, когда степень сжатия изменяется в сторону низкой степени сжатия, механизм 5 переменной степени сжатия изменяет степень сжатия посредством более высокой скорости отклика, чем скорость отклика при изменении стороны высокой степени сжатия, без соответствия скорости отклика при изменении степени сжатия в сторону высокой степени сжатия. Следовательно, представляется возможным пресекать ухудшение отклика.
[0024] Кроме того, когда степень сжатия изменяется в двигателе 1 внутреннего сгорания, включающем в себя механизм 5 переменной степени сжатия, существует ограничение способности (отклика) фактической степени сжатия придерживаться относительно целевой степени сжатия. Соответственно, например, когда большое изменение целевой степени сжатия непрерывно часто выполняется, фактическая степень сжатия не придерживается целевой степени сжатия, и потребление мощности электромотора 28, выполненного с возможностью приводить в действие механизм 5 переменной степени сжатия, становится большим. Это обусловлено тем, что потребление мощности электромотора 28 становится выше, когда отклонение между фактической степенью сжатия и целевой степенью сжатия является большим.
[0025] Фиг. 3 - это временная диаграмма, показывающая один пример (эталонный пример), в котором механизм 5 переменной степени сжатия управляется без учета ограничения способности фактической степени сжатия придерживаться относительно целевого значения.
[0026] Перед временем t1 существует установившееся состояние, в котором степень сжатия поддерживается в предварительно определенной высокой степени сжатия. Соответственно, потребление мощности электромотора 28 становится относительно небольшим.
[0027] Во время t1 целевая степень сжатия (прерывистая линия на фиг. 3) изменяется на предварительно определенную промежуточную степень сжатия. Со времени t1 до времени t2, в которое электромотор 28 достигает предварительно определенной максимальной скорости вращения, скорость вращения электромотора 28 увеличивается. Т.е., со времени t1 до времени t2 скорость вращения электромотора 28 ускоряется. Соответственно, электромотору 28 нужен большой крутящий момент. Следовательно, потребление мощности электромотора 28 относительно увеличивается.
[0028] Когда скорость вращения электромотора 28 достигает максимальной скорости вращения, скорость вращения электромотора 28 поддерживается на максимальной скорости вращения до времени t3, в которое фактическая степень сжатия (сплошная линия на фиг. 3) становится близкой к целевой степени сжатия до некоторой степени. Т.е., со времени t2 до времени t3 скорость вращения электромотора 28 становится постоянной. Степень сжатия изменяется (по направлению к низкой степени сжатия) практически в постоянном состоянии скорости вращения электромотора 28. Следовательно, потребление мощности электромотора 28 становится относительно небольшим.
[0029] Со времени t3 до времени t4 разница между фактической степенью сжатия и целевой степенью сжатия становится небольшой. Скорость вращения электромотора 28 уменьшается, так что фактическая степень сжатия становится меньше целевой степени сжатия. Соответственно, потребление мощности становится относительно высоким.
[0030] Со времени t4 до времени t5 степень сжатия поддерживается в низкой степени сжатия. Соответственно, потребление мощности электромотора 28 становится относительно низким.
[0031] После времени t5 большое изменение целевой степени сжатия (изменение, при котором значение целевой степени сжатия значительно изменяется) многократно часто выполняется. Т.е., целевая степень сжатия изменяется с промежуточной степени сжатия на предварительно определенную низкую степень сжатия. Затем, целевая степень сжатия изменяется с предварительно определенной низкой степени сжатия на предварительно определенную высокую степень сжатия, или изменяется с предварительно определенной высокой степени сжатия на предварительно определенную низкую степень сжатия в течение короткого периода времени. Т.е., после времени t5 целевая степень сжатия многократно часто увеличивается и уменьшается, так что фактическая степень сжатия не может придерживаться целевой степени сжатия. Соответственно, после времени t5, состояние, в котором разница между целевой степенью сжатия и фактической степенью сжатия является большой, продолжается. Следовательно, состояние, когда скорость вращения электромотора 28 ускоряется, продолжается в течение длительного периода времени. Следовательно, потребление мощности электромотора 28 становится относительно высоким. Например, когда отпускание нажатия педали акселератора повторяется, целевая степень сжатия часто многократно увеличивается и уменьшается аналогично времени после времени t6.
[0032] Кроме того, со времени t6 до времени t7, фактическая степень сжатия становится близкой к целевой степени сжатия. Соответственно, потребление мощности электромотора 28 временно становится низким.
[0033] Таким образом, когда механизм 5 переменной степени сжатия управляется без учета ограничения способности фактической степени сжатия придерживаться целевого значения, большое изменение целевой степени сжатия многократно часто выполняется, большое отклонение между целевой степенью сжатия и фактической степенью сжатия продолжается. Соответственно, состояние, когда скорость вращения электромотора 28 ускоряется или замедляется, продолжается, так что потребление мощности увеличивается.
[0034] Следовательно, в этом варианте осуществления, степень сжатия управляется с учетом ограничения способности фактической степени сжатия придерживаться целевого значения.
[0035] Фиг. 4 - это блок-схема последовательности операций, показывающая последовательность операций управления двигателем 1 внутреннего сгорания согласно настоящему изобретению. На этапе S1 считывается состояние приведения в действие двигателя 1 внутреннего сгорания. В частности, считываются скорость вращения двигателя, нагрузка (степень открытия дроссельной заслонки) и температура масла двигателя 1.
[0036] На этапе S2 первая целевая степень сжатия, которая является основной целевой степенью сжатия, вычисляется на основе состояния приведения в действие. Т.е., первая целевая степень сжатия вычисляется из скорости двигателя и нагрузки. В этом варианте осуществления блок 31 управления сохраняет карту вычислений первой целевой степени сжатия (не показана), в которой первая целевая степень сжатия назначается (выделяется) в соответствии со скоростью двигателя и нагрузкой. Первая целевая степень сжатия вычисляется на основе карты вычислений первой целевой степени сжатия.
[0037] На этапе S3 пороговое значение величины изменения вычисляется из нагрузки и температуры масла. Пороговое значение величины изменения включает в себя первое пороговое значение величины изменения и второе пороговое значение величины изменения. Первое пороговое значение величины изменения является пороговым значением величины изменения второй целевой степени сжатия (которая является управляющей целевой степенью сжатия) в единицу времени в сторону высокой степени сжатия. Второе пороговое значение величины изменения является пороговым значением величины изменения второй целевой степени сжатия (которая является управляющей целевой степенью сжатия) в единицу времени в сторону низкой степени сжатия.
[0038] В этом варианте осуществления блок 31 управления сохраняет карту вычислений первого порогового значения величины изменения, в которой первое пороговое значение величины изменения назначается (выделяется) в соответствии с нагрузкой и температурой масла. Первое пороговое значение величины изменения вычисляется на основе карты вычислений первого порогового значения величины изменения. Карта вычислений первого порогового значения величины изменения задается так, что вычисленное первое пороговое значение величины изменения становится больше, когда нагрузка становится ниже, а температура масла становится выше, как показано на фиг. 5. Т.е., карта вычислений первого порогового значения величины изменения задается так, что вычисленное первое пороговое значение величины изменения является меньшим, когда нагрузка становится выше, а температура масла - ниже.
[0039] В этом варианте осуществления блок 31 управления сохраняет карту вычислений второго порогового значения величины изменения, в которой второе пороговое значение величины изменения назначается (выделяется) в соответствии с нагрузкой и температурой масла. Второе пороговое значение величины изменения вычисляется на основе карты вычислений второго порогового значения величины изменения. Карта вычислений второго порогового значения величины изменения задается так, что вычисленное второе пороговое значение величины изменения становится больше, когда нагрузка становится выше, и температура масла становится выше, как показано на фиг. 6. Т.е., карта вычислений второго порогового значения величины изменения задается так, что вычисленное второе пороговое значение величины изменения становится меньше, когда нагрузка становится ниже, и температура масла снижается. Кроме того, второе пороговое значение величины изменения задается большим, чем первое пороговое значение величины изменения в том же состоянии приведения в действие.
[0040] На этапе S4 оценивается, действительно или нет разница между первой целевой степенью сжатия и предыдущим значением второй целевой степени сжатия равна или меньше предварительно определенного допустимого значения. Когда она равна или меньше предварительно определенного допустимого значения, процесс переходит к этапу S5. Когда она больше предварительно определенного допустимого значения, процесс переходит к этапу S6. В этом случае предварительно определенное допустимое значение является первым пороговым значением величины изменения, когда степень сжатия изменяется в направлении увеличения. Предварительно определенное допустимое значение является вторым пороговым значением величины изменения, когда степень сжатия изменяется в направлении уменьшения.
[0041] На этапе S5 первая целевая степень сжатия устанавливается во вторую целевую степень сжатия. На этапе S6 вторая целевая степень сжатия вычисляется с помощью порогового значения величины изменения. Т.е., когда степень сжатия изменяется в направлении увеличения, значение, полученное добавлением первого порогового значения величины изменения к предыдущему значению второй целевой степени сжатия, устанавливается во вторую целевую степень сжатия. Когда степень сжатия изменяется в направлении уменьшения, значение, полученное вычитанием второго порогового значения величины изменения из предыдущего значения второй целевой степени сжатия, устанавливается во вторую целевую степень сжатия. Таким образом, величина изменения второй целевой степени сжатия в единицу времени ограничивается, чтобы быть равной или меньше первого порогового значения величины изменения, или быть равной или меньше второго порогового значения величины изменения.
[0042] Вторая целевая степень сжатия становится идентичной первой целевой степени сжатия в установившемся состоянии, в котором первая целевая степень сжатия является идентичной фактической степени сжатия.
[0043] Кроме того, блок 31 управления вычисляет первую целевую степень сжатия и вторую целевую степень сжатия. Соответственно, блок 31 управления соответствует секции вычисления первой целевой степени сжатия и секции вычисления второй целевой степени сжатия. Кроме того, секция вычисления первой целевой степени сжатия является синонимичной с секцией вычисления основной целевой степени сжатия. Секция вычисления второй целевой степени сжатия является синонимичной с секцией вычисления управляющей целевой степени сжатия.
[0044] Фиг. 7 - это временная диаграмма, показывающая один пример в случае, когда механизм 5 переменной степени сжатия управляется с учетом ограничения способности фактической степени сжатия придерживаться целевого значения. Т.е., фиг. 7 является временной диаграммой, показывающей один пример в случае, когда механизм 5 переменной степени сжатия управляется с помощью второй целевой степени сжатия, величина изменения которой в единицу времени является ограниченной.
[0045] До времени t1' реализуется установившееся состояние, когда степень сжатия удерживается в предварительно определенной высокой степени сжатия. Соответственно, потребление мощности электромотора 28 становится относительно низким.
[0046] Во время t1' первая целевая степень сжатия (тонкая прерывистая линия на фиг. 7) изменяется на предварительно определенную промежуточную степень сжатия. Механизм 5 переменной степени сжатия управляется с помощью второй целевой степени сжатия, величина изменения которой с предыдущего значения второй целевой степени сжатия (прерывистая линия на фиг. 7) ограничивается вторым пороговым значением величины изменения. Соответственно, разница между второй целевой степенью сжатия и фактической степенью сжатия (сплошная линия на фиг. 7) становится относительно небольшой непосредственно после времени t1'. Потребление мощности слегка увеличивается относительно случая, когда механизм 5 переменной степени сжатия управляется с помощью первой целевой степени сжатия.
[0047] Со времени t1' до времени t2', в которое электромотор 28 достигает предварительно определенной максимальной скорости вращения, скорость вращения электромотора 28 увеличивается. Т.е., со времени t1' до времени t2' скорость вращения электромотора 28 ускоряется. Электромотору 28 необходим большой крутящий момент. Соответственно, потребление мощности электромотора 28 становится относительно высоким.
[0048] Когда скорость вращения электромотора 28 достигает максимальной скорости вращения, скорость вращения электромотора 28 поддерживается на максимальной скорости вращения до времени t3', в которое фактическая степень сжатия становится ближе к целевой степени сжатия до некоторой степени. Т.е., со времени t2' до времени t3' скорость вращения электромотора 28 становится постоянной. Степень сжатия изменяется (уменьшается) в состоянии, когда скорость вращения электромотора 28 является практически постоянной. Соответственно, потребление мощности электромотора 28 является относительно низким.
[0049] Со времени t3' до времени t4' разница между фактической степенью сжатия и второй целевой степенью сжатия становится небольшой. Скорость вращения электромотора 28 уменьшается, так что фактическая степень сжатия не становится меньше второй целевой степени сжатия. Соответственно, потребление мощности электромотора 28 становится относительно высоким.
[0050] Кроме того, в случае, когда первая целевая степень сжатия не изменяется до тех пор, пока фактическая степень сжатия не станет идентичной первой целевой степени сжатия после изменения первой целевой степени сжатия, потребление мощности электромотора 28, когда механизм 5 переменной степени сжатия управляется посредством первой целевой степени сжатия, является практически идентичным потреблению мощности электромотора 28, когда механизм 5 переменной степени сжатия управляется посредством второй целевой степени сжатия. Т.е., когда величина изменения степени сжатия со времени t1 до времени t4 на фиг. 3 является практически идентичной величине изменения степени сжатия со времени t1' до времени t4' на фиг. 7, потребление мощности электромотора 28 со времени t1 до времени t4 на фиг. 3 является практически идентичным потреблению мощности электромотора 28 со времени t1' до времени t4' на фиг. 7.
[0051] Со времени t4' до времени t5' степень сжатия удерживается в низкой степени сжатия. Соответственно, потребление мощности электромотора 28 становится относительно низким.
[0052] После времени t5' большое изменение целевой степени сжатия многократно часто выполняется. Т.е., первая целевая степень сжатия изменяется с промежуточной степени сжатия на предварительно определенную низкую степень сжатия. Затем, первая целевая степень сжатия многократно изменяется с предварительно определенной низкой степени сжатия на предварительно определенную высокую степень сжатия, или изменяется с предварительно определенной высокой степени сжатия на предварительно определенную низкую степень сжатия в течение короткого периода времени. Т.е., после времени t5', первая целевая степень сжатия многократно часто увеличивается или уменьшается таким образом, что фактическая степень сжатия не может придерживаться первой целевой степени сжатия.
[0053] Однако, в этом варианте осуществления, механизм 5 переменной степени сжатия управляется с помощью второй целевой степени сжатия, величина изменения которой в единицу времени является ограниченной. Соответственно, после времени t5', представляется возможным относительно уменьшать разницу между второй целевой степенью сжатия и фактической степенью сжатия. Следовательно, механизм 5 переменной степени сжатия может уменьшать потребление мощности электромотора 28 относительно случая, когда механизм 5 переменной степени сжатия управляется с помощью первой целевой степени сжатия.
[0054] Т.е., вторая целевая степень сжатия со времени t5' до времени t6' выше первой целевой степени сжатия со времени t5' до времени t6'. При этом фактическая степень сжатия должна легко придерживаться второй целевой степени сжатия. Соответственно, представляется возможным сдерживать потребление мощности электромотора 28 относительно случая, когда механизм 5 переменной степени сжатия управляется с помощью первой целевой степени сжатия. Вторая целевая степень сжатия со времени t5' до времени t6' ограничивается так, что величина изменения с предыдущего значения второй целевой степени сжатия становится вторым пороговым значением величины изменения.
[0055] Кроме того, вторая целевая степень сжатия со времени t6' до времени t7' ниже первой целевой степени сжатия со времени t6' до времени t7'. Соответственно, фактическая степень сжатия должна легко придерживаться второй целевой степени сжатия. Следовательно, представляется возможным сдерживать потребление мощности электромотора 28 относительно случая, когда механизм 5 переменной степени сжатия управляется с помощью первой целевой степени сжатия. Вторая целевая степень сжатия со времени t6' до времени t7' ограничивается так, что величина изменения с предыдущего значения второй целевой степени сжатия становится первым пороговым значением величины изменения.
[0056] В этом варианте осуществления первое пороговое значение величины изменения и второе пороговое значение величины изменения, которые используются в вычислении второй целевой степени сжатия, устанавливаются отличающимися друг от друга. Т.е., первое пороговое значение величины изменения и второе пороговое значение величины изменения задаются так, что значение ограничения величины изменения второй целевой степени сжатия в единицу времени при изменении степени сжатия в сторону высокой степени сжатия отличается от значения ограничения величины изменения второй целевой степени сжатия в единицу времени при изменении степени сжатия в сторону низкой степени сжатия.
[0057] Соответственно, вторая целевая степень сжатия может быть задана без чрезмерного ограничения величины изменения в единицу времени. Т.е., вторая целевая степень сжатия может быть задана в соответствии со случаем, когда степень сжатия изменяется в сторону высокой степени сжатия, и случаем, когда степень сжатия изменяется в сторону низкой степени сжатия. Следовательно, представляется возможным уменьшать потребление мощности мотора, выполненного с возможностью приводить в действие механизм 5 переменной степени сжатия, в то же время пресекая ухудшение отклика механизма 5 переменной степени сжатия.
[0058] Кроме того, второе пороговое значение величины изменения задается больше первого порогового значения величины изменения. При этом представляется возможным пресекать ухудшение отклика механизма 5 переменной степени сжатия при изменении степени сжатия по направлению к низкой степени сжатия.
[0059] Давление в цилиндре является более высоким, когда нагрузка двигателя 1 внутреннего сгорания становится выше, так что усилие, действующее на поршень 4 (усилие, давящее на поршень 4), становится относительно большим. Т.е., усилие, действующее на механизм 5 переменной степени сжатия, чтобы изменять степень сжатия в сторону более низкой степени сжатия, становится относительно большим. Соответственно, механизму 5 переменной степени сжатия трудно изменять степень сжатия в сторону высокой степени сжатия. Скорость отклика при изменении степени сжатия в сторону высокой степени сжатия относительно уменьшается.
[0060] Соответственно, первое пороговое значение величины изменения задается меньшим, когда нагрузка двигателя 1 внутреннего сгорания становится выше. При этом вторая целевая степень сжатия может быть дополнительно фактически придерживаемым целевым значением. Представляется возможным дополнительно сдерживать потребление мощности электромотора 28, выполненного с возможностью приводить в действие механизм 5 переменной степени сжатия.
[0061] Кроме того, второе пороговое значение величины изменения задается большим, когда нагрузка двигателя 1 внутреннего сгорания становится выше. При этом вторая целевая степень сжатия может быть дополнительно фактически придерживаемым целевым значением. При этом представляется возможным пресекать чрезмерное ограничение отклика (скорость отклика) механизма 5 переменной степени сжатия посредством чрезмерного уменьшения второго порогового значения величины изменения.
[0062] Вязкость масла становится выше, когда температура масла двигателя 1 внутреннего сгорания становится ниже.
Скорость отклика механизма 5 переменной степени сжатия при изменении степени сжатия уменьшается.
[0063] Соответственно, первое пороговое значение величины изменения и второе пороговое значение величины изменения задаются меньшими, когда температура масла двигателя 1 внутреннего сгорания становится ниже. При этом вторая целевая степень сжатия может быть дополнительно фактически придерживаемым целевым значением. Представляется возможным дополнительно сдерживать потребление мощности электромотора 28, выполненного с возможностью приводить в действие механизм 5 переменной степени сжатия.
[0064] Кроме того, в вышеописанном варианте осуществления, первое пороговое значение величины изменения и второе пороговое значение величины изменения изменяются в соответствии с состоянием приведения в действие. Однако, одно из первого порогового значения величины изменения и второго порогового значения величины изменения может изменяться в соответствии с состоянием приведения в действие. Другое из первого порогового значения величины изменения и второго порогового значения величины изменения может быть фиксировано в предварительно определенном значении, ранее заданном независимо от состояния приведения в действие. В этом случае вторая целевая степень сжатия становится фактически придерживаемым целевым значением относительно первой целевой степени сжатия. Соответственно, механизм 5 переменной степени сжатия может уменьшать потребление мощности мотора 28 при переходе, относительно управления с помощью первой целевой степени сжатия.
[0065] Кроме того, вышеописанный вариант осуществления относится к способу управления и устройству управления для двигателя 1 внутреннего сгорания.
Изобретение относится к способу управления для двигателя внутреннего сгорания. Механизм (5) переменной степени сжатия является многозвенным поршневым кривошипно-шатунным механизмом, состоящим из множества звеньев, связывающих поршень 4 и коленчатый вал (6). Нагрузка от сгорания действует в направлении прижатия поршня (4) в направлении вниз. Соответственно, скорость отклика при изменении степени сжатия в сторону низкой степени сжатия выше скорости отклика при изменении степени сжатия в сторону высокой степени сжатия. Следовательно, скорость отклика в сторону низкой степени сжатия задается выше скорости отклика в сторону высокой степени сжатия. При этом изменение в сторону низкой степени сжатия изменяется со скоростью отклика выше скорости отклика для стороны высокой степени сжатия без соответствия скорости отклика на стороне высокой степени сжатия. Соответственно, представляется возможным пресекать ухудшение отклика. 2 н. и 5 з.п. ф-лы, 7 ил.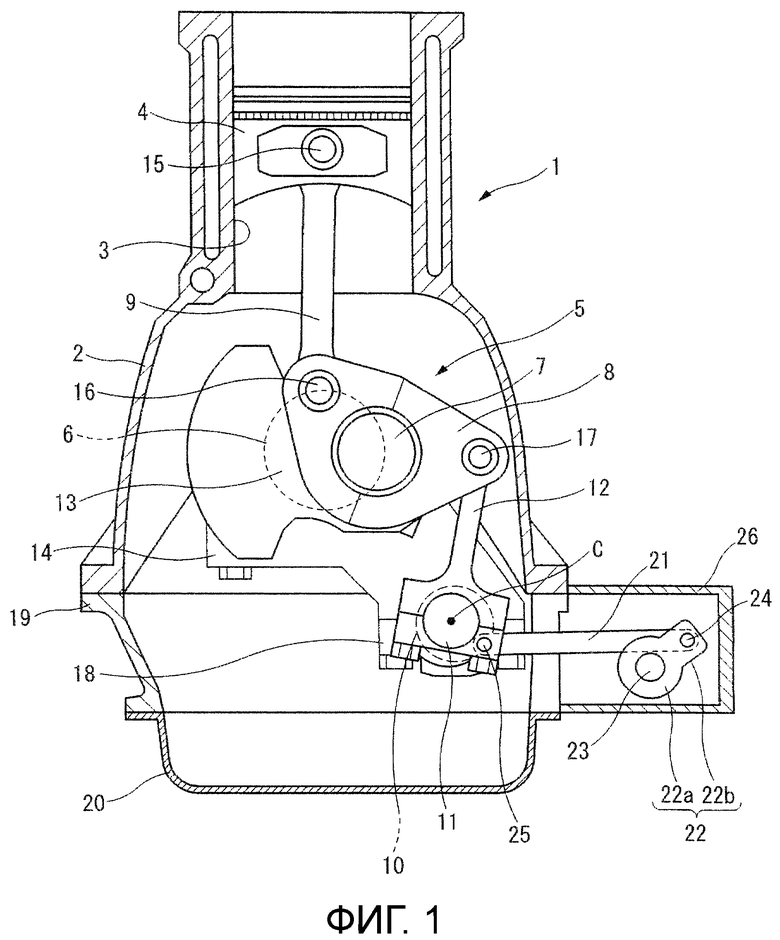
1. Способ управления для двигателя внутреннего сгорания, который включает в себя механизм переменной степени сжатия, который выполнен с возможностью изменять степень сжатия, и в котором целевая степень сжатия изменяется при изменении степени сжатия так, что фактическая степень сжатия не может следовать за целевой степенью сжатия, способ управления содержит этапы, на которых:
управляют степенью сжатия с помощью управляющей целевой степени сжатия, величина изменения которой в единицу времени ограничивается, чтобы быть равной или меньше предварительно определенного порогового значения величины изменения, и которая изменяется так, что разница между управляющей целевой степенью сжатия и фактической степенью сжатия меньше, чем разница между целевой степенью сжатия и фактической степенью сжатия; и
задают первое пороговое значение величины изменения, которое является пороговым значением величины изменения управляющей целевой степени сжатия в сторону высокой степени сжатия, меньше второго порогового значения величины изменения, которое является пороговым значением величины изменения управляющей целевой степени сжатия в сторону низкой степени сжатия.
2. Способ управления для двигателя внутреннего сгорания по п. 1, в котором первое пороговое значение величины изменения задается меньшим, когда нагрузка двигателя внутреннего сгорания становится выше.
3. Способ управления для двигателя внутреннего сгорания по п. 1, в котором второе пороговое значение величины изменения задается большим, когда нагрузка двигателя внутреннего сгорания становится выше.
4. Способ управления для двигателя внутреннего сгорания по п. 1, в котором по меньшей мере одно из первого порогового значения величины изменения и второго порогового значения величины изменения изменяется на основе состояния приведения в действие двигателя внутреннего сгорания.
5. Способ управления для двигателя внутреннего сгорания по п. 1, в котором первое пороговое значение величины изменения и второе пороговое значение величины изменения задаются меньшими, когда температура масла двигателя внутреннего сгорания становится ниже.
6. Способ управления для двигателя внутреннего сгорания по п. 1, в котором управляющая целевая степень сжатия ограничивается так, что разница между предыдущим значением управляющей целевой степени сжатия и основной целевой степенью сжатия, вычисленной на основе состояния приведения в действие двигателя внутреннего сгорания, является равной или меньше порогового значения величины изменения.
7. Устройство управления для двигателя внутреннего сгорания, в котором целевая степень сжатия изменяется при изменении степени сжатия так, что фактическая степень сжатия не может следовать за целевой степенью сжатия, устройство управления содержит:
секцию вычисления управляющей целевой степени сжатия, выполненную с возможностью вычислять управляющую целевую степень сжатия, величина изменения которой в единицу времени ограничивается, чтобы быть равной или меньше порогового значения величины изменения, и которая изменяется так, что разница между управляющей целевой степенью сжатия и фактической степенью сжатия меньше, чем разница между целевой степенью сжатия и фактической степенью сжатия; и
механизм переменной степени сжатия, выполненный с возможностью изменять степень сжатия двигателя внутреннего сгорания с помощью управляющей целевой степени сжатия,
первого порогового значения величины изменения, которое является пороговым значением величины изменения управляющей целевой степени сжатия в единицу времени в сторону высокой степени сжатия, и которое задается меньше второго порогового значения величины изменения, которое является пороговым значением величины изменения управляющей целевой степени сжатия в единицу времени в сторону низкой степени сжатия.
| JP 2011241764 A, 01.12.2011 | |||
| JP 2012225166 A, 15.11.2012 | |||
| JP 2003090236 A, 28.03.2003 | |||
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2235213C1 |

