Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления двигателем внутреннего сгорания и способу управления для двигателя внутреннего сгорания.
Уровень техники
[0002] На двигателях внутреннего сгорания, сконфигурированных, чтобы изменять степень сжатия двигателя, степень сжатия двигателя регулируется до относительно высокой степени сжатия во время работы с низкой нагрузкой, а также регулируется до относительно низкой степени сжатия во время работы с высокой нагрузкой. Поэтому, когда режим работы изменяется с режима работы с низкой нагрузкой на режим работы с высокой нагрузкой, например, во время режима ускорения, степень сжатия двигателя уменьшается в соответствии с увеличением нагрузки. Полагая, что фактическая степень сжатия становится выше целевой степени сжатия вследствие задержки реакции изменения степени сжатия двигателя при уменьшении степени сжатия двигателя в соответствии с изменением в режиме работы вышеупомянутым образом, вероятно может возникать детонация.
[0003] Например, патентный документ 1 раскрывает устройство управления двигателем внутреннего сгорания, сконфигурированное, чтобы вычислять вторую целевую степень сжатия посредством выполнения процесса опережения по фазе, в котором задержка реакции изменения степени сжатия, вызванная механизмом переменной степени сжатия, принимается во внимание, относительно первой целевой степени сжатия, вычисленной из текущей нагрузки двигателя (объема всасываемого воздуха), и чтобы регулировать степень сжатия ближе ко второй целевой степени сжатия.
[0004] В этом патентном документе 1, в случае, когда быстрота реакции изменения степени сжатия, изменяемой посредством механизма переменной степени сжатия, превышает быстроту реакции изменения объема всасываемого воздуха, превышающая быстрота реакции изменения степени сжатия предоставляет возможность вычисления второй целевой степени сжатия. Поэтому, возможно приводить фактическую степень сжатия достаточно близко к первой целевой степени сжатия, соответствующей первоначальной степени сжатия.
[0005] Однако, наоборот, в случае, когда быстрота реакции изменения объема всасываемого воздуха превосходит быстроту реакции изменения степени сжатия, изменяемой посредством механизма переменной степени сжатия, существует вероятность того, что вторая целевая степень сжатия не может следовать первой целевой степени сжатия.
Список библиографических ссылок
Патентная литература
[0006] Патентный документ 1: Японская патентная предварительная публикация № JP2005-163739.
Сущность изобретения
[0007] Поэтому, в виду вышеизложенного, устройство управления двигателем внутреннего сгорания изобретения характеризуется средством вычисления прогнозируемого объема всасываемого воздуха для вычисления, на основе нагрузки двигателя для двигателя внутреннего сгорания, прогнозируемого объема всасываемого воздуха, после того как предписанное время истекло с текущего момента времени, средством вычисления целевой степени сжатия для вычисления, на основе прогнозируемого объема всасываемого воздуха, вычисленного средством вычисления прогнозируемого объема всасываемого воздуха, целевой степени сжатия по истечении предписанного времени с текущего момента времени, и средством вычисления управляющей команды для вычисления управляющей команды механизму переменной степени сжатия с тем, чтобы приводить фактическую степень сжатия в соответствие с целевой степенью сжатия.
[0008] Согласно изобретению, даже когда переходная быстрота реакции изменения объема всасываемого воздуха превосходит переходную быстроту реакции изменения степени сжатия, представляется возможным вынуждать фактическую степень сжатия следовать точно целевой степени сжатия.
Краткое описание чертежей
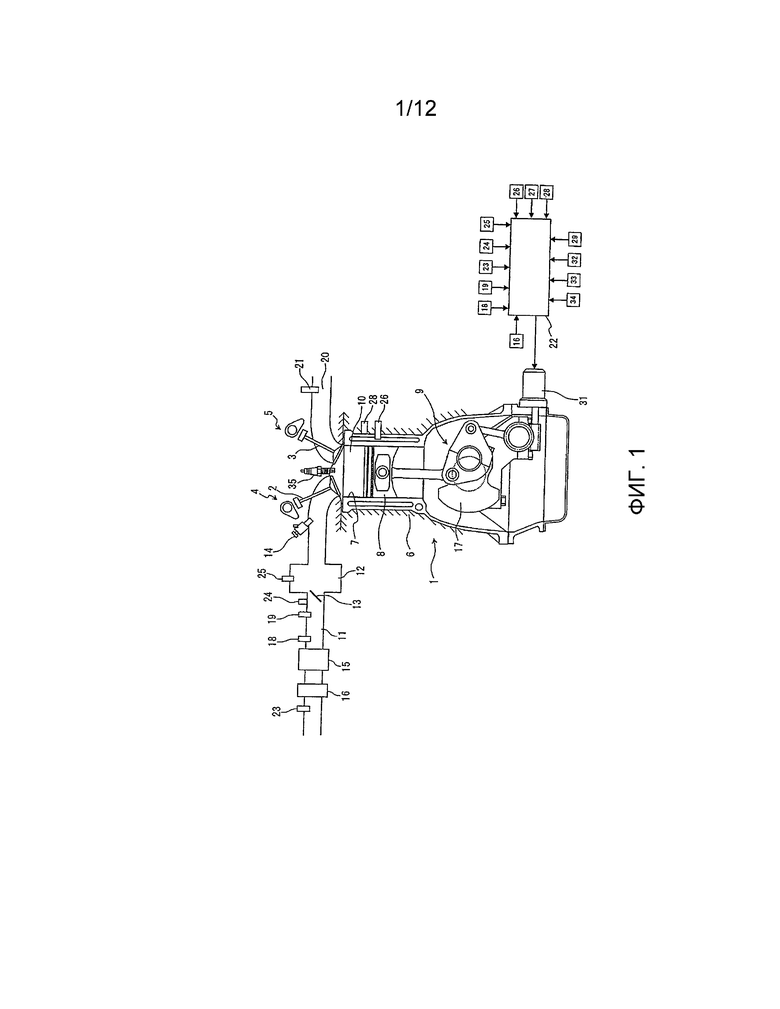
[0009] [Фиг. 1] Фиг. 1 - это пояснительный вид, схематично иллюстрирующий системную конфигурацию устройства управления двигателем внутреннего сгорания изобретения.
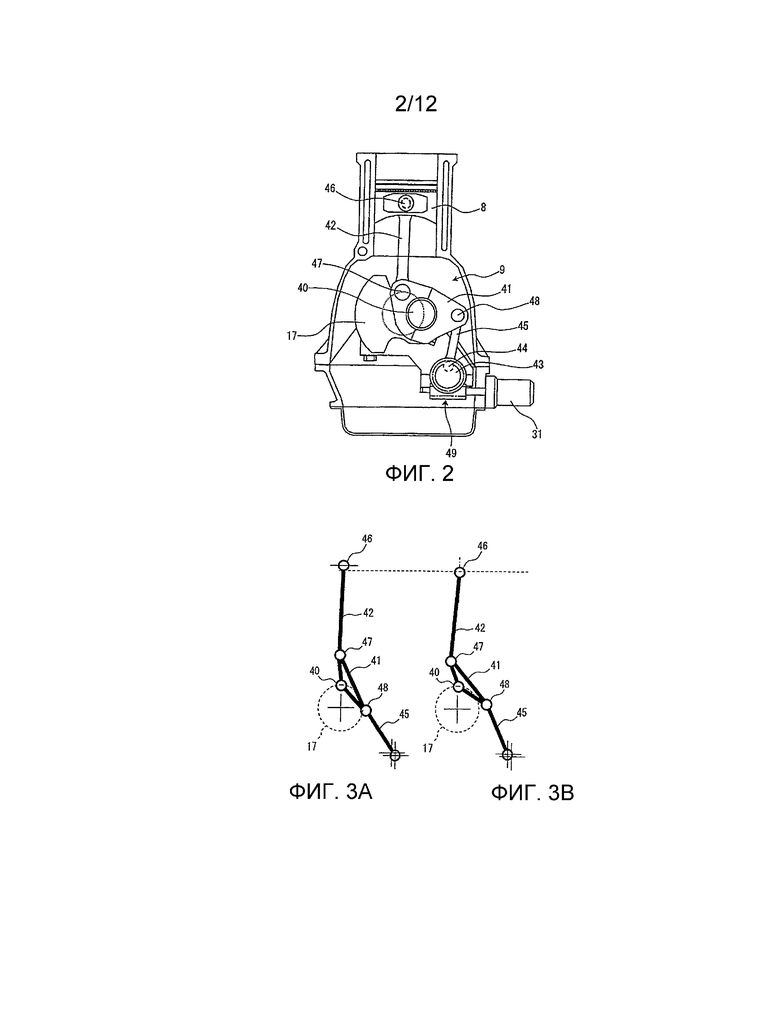
[Фиг. 2] Фиг. 2 - это пояснительный вид, схематично иллюстрирующий механизм переменной степени сжатия, который применяется к устройству управления двигателем внутреннего сгорания изобретения.
[Фиг. 3] Фиг. 3 - это пояснительный вид, схематично иллюстрирующий пространственное положение рычага механизма переменной степени сжатия, и фиг. 3A показывает позицию высокой степени сжатия, тогда как фиг. 3B показывает позицию низкой степени сжатия.
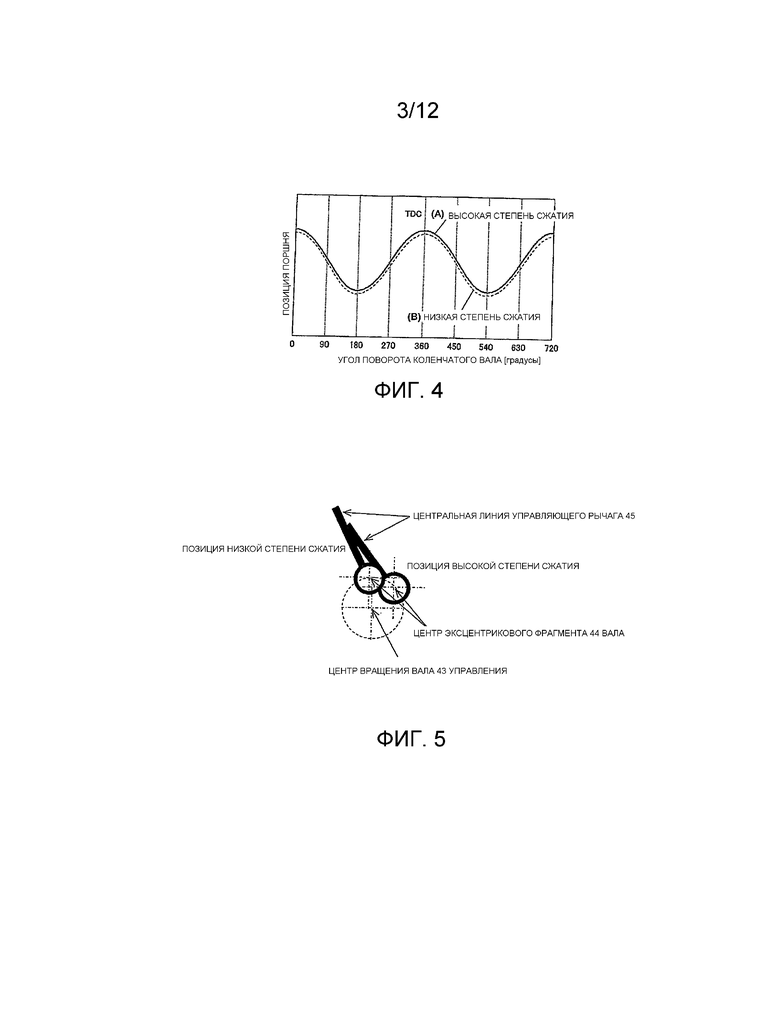
[Фиг. 4] Фиг. 4 - это график характеристики, иллюстрирующий движение поршня механизма переменной степени сжатия.
[Фиг. 5] Фиг. 5 - это пояснительный вид, схематично иллюстрирующий позиционное соотношение управляющего рычага и вала управления и т.п. в позиции низкой степени сжатия и позиции высокой степени сжатия механизма переменной степени сжатия.
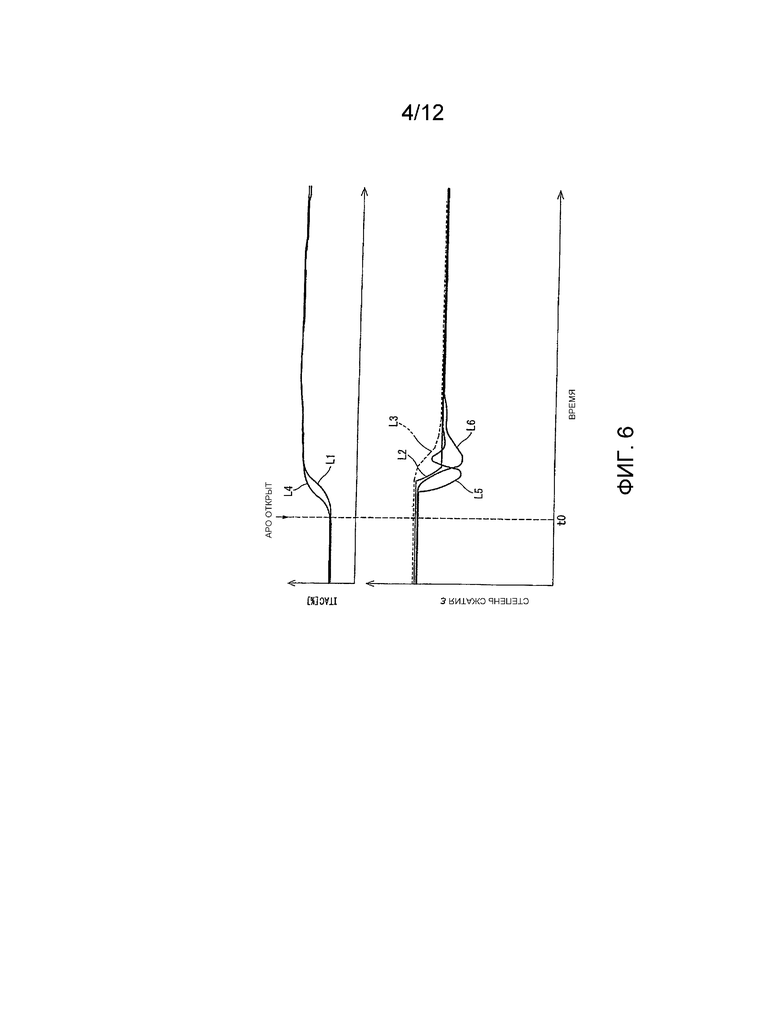
[Фиг. 6] Фиг. 6 - это временная диаграмма, иллюстрирующая изменение в эффективности наддува и изменение в степени сжатия в течение переходного периода.
[Фиг. 7] Фиг. 7 - это блок-схема, схематично иллюстрирующая последовательность операций управления для механизма переменной степени сжатия.
[Фиг. 8] Фиг. 8 - это соответствие для вычисления целевой степени сжатия.
[Фиг. 9] Фиг. 9 - это блок-схема, иллюстрирующая процедуру вычисления эффективности ITAC(t) наддува.
[Фиг. 10] Фиг. 10 - это блок-схема, иллюстрирующая процедуру вычисления предписанного времени Tact.
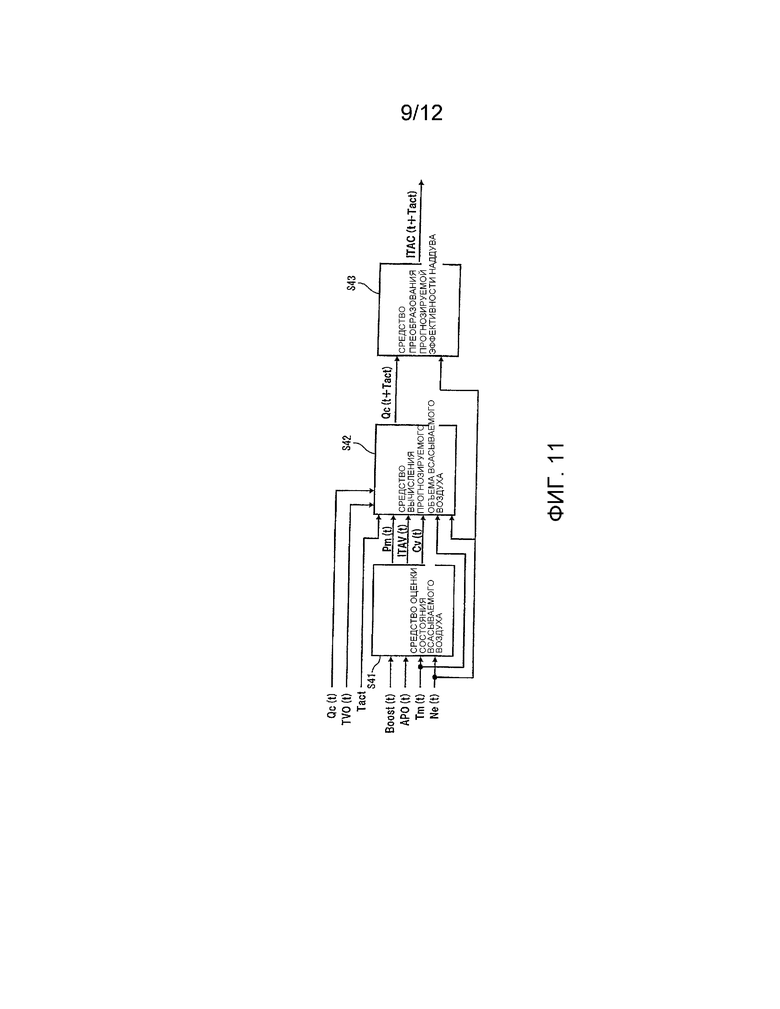
[Фиг. 11] Фиг. 11 - это блок-схема, иллюстрирующая процедуру вычисления прогнозируемой эффективности ITAC(t+Tact) наддува.
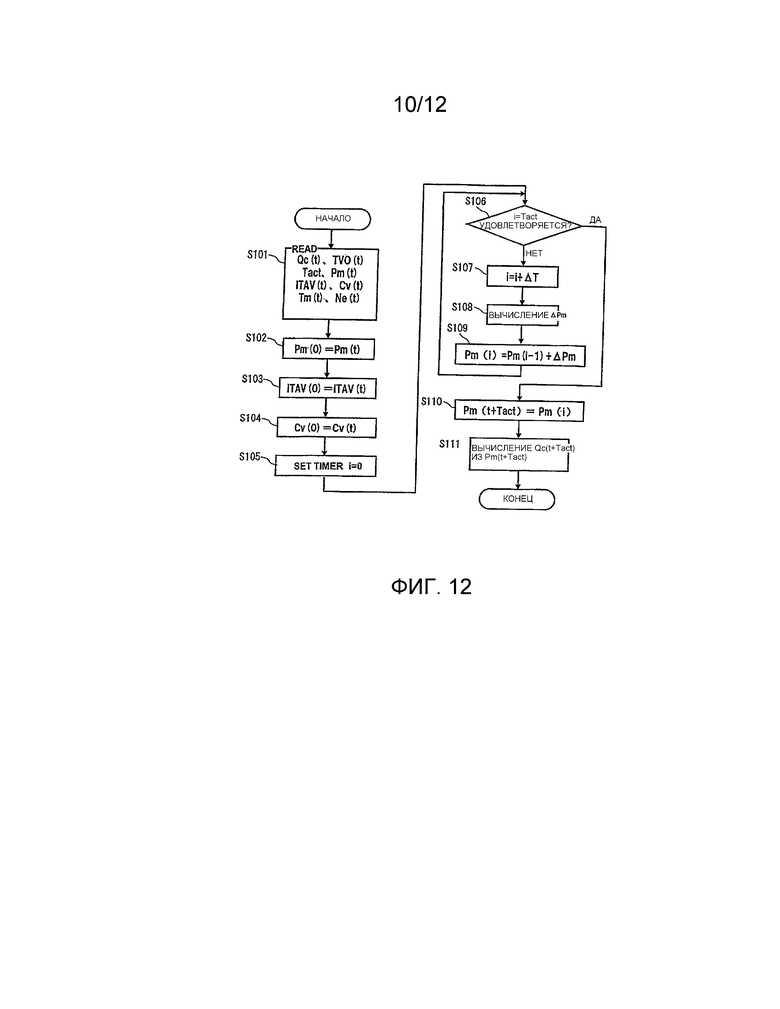
[Фиг. 12] Фиг. 12 - это блок-схема последовательности операций, иллюстрирующая процедуру вычисления прогнозируемого объема Qc(t+Tact) всасываемого воздуха.
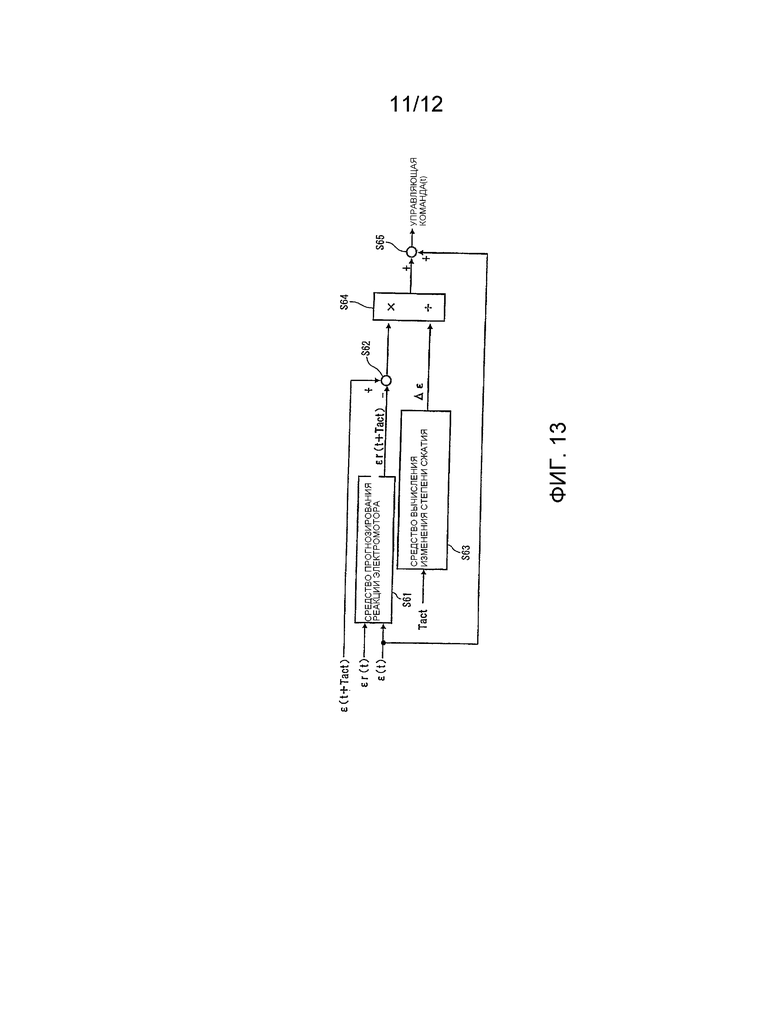
[Фиг. 13] Фиг. 13 - это блок-схема, иллюстрирующая процедуру вычисления управляющей команды (t).
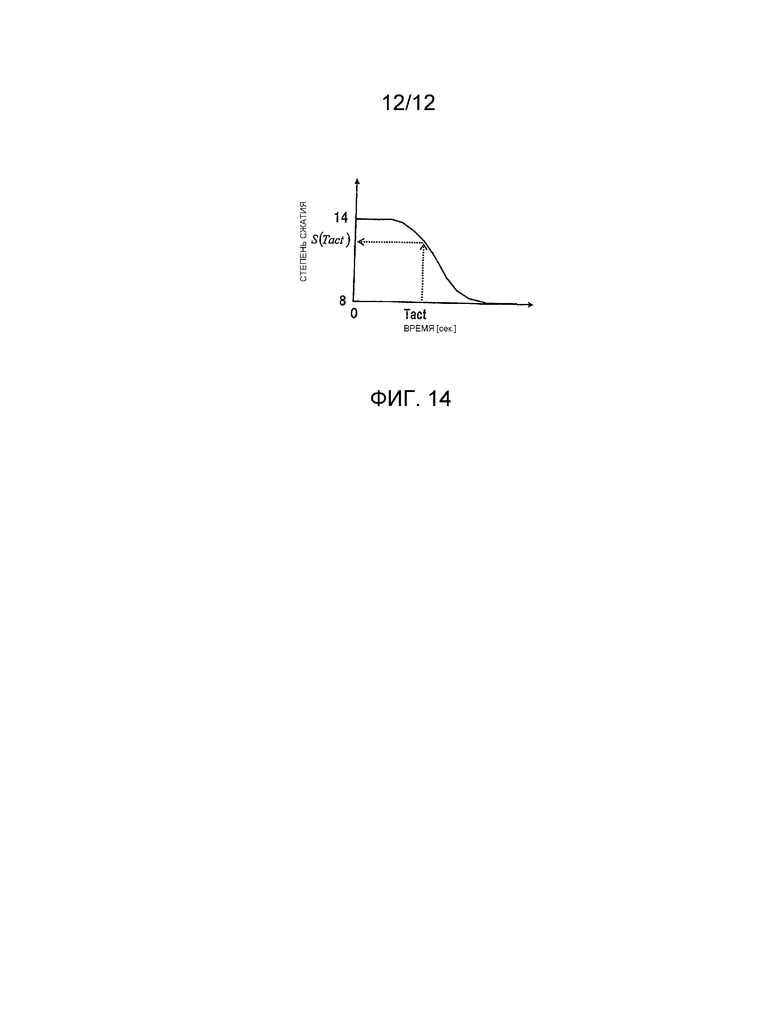
[Фиг. 14] Фиг. 14 - это пояснительный вид, иллюстрирующий один пример графика реакции изменения степени сжатия.
Подробное описание вариантов осуществления
[0010] Один вариант осуществления настоящего изобретения описывается далее в данном документе подробно со ссылкой на чертежи. Прежде всего, фундаментальная конфигурация двигателя 1 внутреннего сгорания, к которому изобретение применяется, объясняется с помощью фиг. 1. Двигатель 1 внутреннего сгорания устанавливается на транспортное средство в качестве источника движения и оснащается механизмом 4 привода клапана на стороне впускного клапана, который приводит в действие впускной клапан 2, механизмом 5 привода клапана на стороне выпускного клапана, который приводит в действие выпускной клапан 3, и механизмом 9 переменной степени сжатия, сконфигурированным, чтобы изменять степень сжатия двигателя посредством изменения позиции верхней мертвой точки (TDC) поршня 8, который двигается возвратно-поступательно в цилиндре 7 блока 6 цилиндров.
[0011] Например, каждый из механизма 4 привода клапана на стороне впускного клапана и механизма 5 привода клапана на стороне выпускного клапана является традиционным механизмом привода клапана прямого действия. Угол срабатывания и фаза подъема центрального угла каждого впускного клапана 2 и выпускного клапана 3 всегда поддерживается постоянной.
[0012] Во впускном канале 11, соединенном через впускной клапан 2 с камерой 10 сгорания предусматриваются дроссельная заслонка 13 для регулирования количества всасываемого воздуха (объема всасываемого воздуха) посредством открытия и закрытия расположенной выше по потоку стороны коллектора 12 всасываемого воздуха и клапана 14 для впрыска топлива, расположенного ниже по потоку от коллектора 12 всасываемого воздуха для впрыска топлива. Дроссельная заслонка 13 является электронно-управляемым дросселем, открытие клапана которого может регулироваться независимо от задействования (нажатия) педали акселератора водителем. Дроссельная заслонка приводится в действие посредством актуатора (не показан).
[0013] Также во впускном канале 11 предусматриваются нагнетатель 15 наддува и расходомер 16 воздуха, оба располагаются выше по потоку от дроссельной заслонки 13.
[0014] Нагнетатель 15 конфигурируется, чтобы нагнетать всасываемый воздух и подавать нагнетаемый всасываемый воздух в камеру 10 сгорания двигателя 1 внутреннего сгорания. Например, применяется механический нагнетатель (просто нагнетатель), который приводится в действие посредством коленчатого вала 17 двигателя 1 внутреннего сгорания, или турбонагнетатель, работающий на выхлопных газах (просто турбонагнетатель). Расходомер 16 воздуха располагается выше по потоку от нагнетателя 15.
[0015] Дополнительно во впускном канале 11 предусматриваются датчик 18 давления всасываемого воздуха для определения давления всасываемого воздуха и датчик 19 температуры всасываемого воздуха для определения температуры всасываемого воздуха, оба располагаются между дроссельной заслонкой 13 и нагнетателем 15.
[0016] В выпускном канале 20, соединенном через выпускной клапан 3 с камерой 10 сгорания, предусматривается датчик 21 соотношения воздух/топливо для определения соотношения воздух/топливо на выпуске.
[0017] Блок 22 управления двигателем (ECU) является общеизвестным цифровым компьютером, оснащенным центральным процессором (CPU), постоянным запоминающим устройством (ROM), оперативным запоминающим устройством (RAM) и интерфейсом ввода-вывода (I/O). ECU принимает различные сигналы, такие как сигнал датчика атмосферного давления от датчика 23 атмосферного давления для определения атмосферного давления, сигнал (TVO(t)) датчика дросселя от датчика 24 дросселя для определения степени открытия дроссельной заслонки 13, сигнал датчика давления в коллекторе от датчика 25 давления в коллекторе для определения давления в коллекторе 12 всасываемого воздуха, сигнал (Tw(t)) датчика температуры воды от датчика 26 температуры воды для определения температуры охлаждающей жидкости двигателя 1 внутреннего сгорания, сигнал (Ne(t)) датчика угла поворота коленчатого вала от датчика 27 угла поворота коленчатого вала для определения скорости вращения двигателя, сигнал датчика детонации от датчика 28 детонации для определения наличия или отсутствия детонации, сигнал (APO(t)) открытия акселератора от датчика 29 открытия акселератора для определения величины нажатия педали акселератора, соответствующей нагрузке (требуемой нагрузке, требуемой водителем), сигнал датчика угла поворота электромотора от датчика 32 угла поворота электромотора для определения угла поворота электромотора 31, сконфигурированного, чтобы приводить в действие механизм 8 переменной степени сжатия, сигнал (Tmo(t)) датчика температуры электромотора от датчика 33 температуры электромотора для определения температуры электромотора 31, и сигнал (VB(t)) датчика напряжения питания от датчика 34 напряжения питания для определения напряжения питания электромотора 31 и т.п., в дополнение к сигналу обнаружения от расходомера 16 воздуха, сигналу (Boost(t)) обнаружения от датчика 18 давления всасываемого воздуха, сигналу (Tm(t)) обнаружения от датчика 19 температуры всасываемого воздуха. В качестве примера, фактическая степень εr(t) сжатия, соответствующая текущей степени сжатия двигателя, вызванной посредством механизма 9 переменной степени сжатия, может быть определена по углу поворота электромотора 31, обнаруженному посредством датчика 32 угла поворота электромотора.
[0018] Затем, ECU 22 выводит управляющие сигналы, определенные на основе этих входных сигналов, к клапану 14 для впрыска топлива, свече 35 зажигания для зажигания воздушно-топливной смеси в камере 10 сгорания, дроссельной заслонке 13, механизму 9 переменной степени сжатия и т.п., соответственно, для объединенного управления объемом впрыска топлива, моментом впрыска топлива, моментом зажигания и открытием дросселя, степенью сжатия двигателя и т.п.
[0019] Как показано на фиг. 2-3, механизм 9 переменной степени сжатия использует многорычажный поршневой кривошипно-шатунный механизм, в котором поршень 8 и шейка 40 коленчатого вала 17 механически связываются друг с другом через множество рычагов. Механизм переменной степени сжатия имеет нижний рычаг 41, поворотно установленный на шейку 40, верхний рычаг 42, через который нижний рычаг 41 и поршень 8 связываются друг с другом, вал 43 управления, оснащенный эксцентриковым фрагментом 44 вала, и управляющий рычаг 45, через который эксцентриковый фрагмент 44 вала и нижний рычаг 41 связываются друг с другом. Один конец верхнего рычага 42 поворотно устанавливается на палец 46 поршня, в то время как другой конец поворотно соединяется с нижним рычагом 41 посредством первого соединительного штифта 47. Один конец управляющего рычага 45 поворотно соединяется с нижним рычагом 41 посредством второго соединительного штифта 48, в то время как другой конец поворотно устанавливается на эксцентриковый фрагмент 44 вала.
[0020] Вал 43 управления размещается параллельно коленчатому валу 17 и поворотно поддерживается посредством блока 6 цилиндров. В качестве примера, вал 43 управления поддерживается и приводится в действие посредством электромотора 31 через зубчатый механизм 49, так что угловое положение вала управления регулируется.
[0021] Как показано на фиг. 3, положение нижнего рычага 41 изменяется через управляющий рычаг 45 посредством изменения углового положения вала 43 управления посредством электромотора 31. Следовательно, степень сжатия двигателя постоянно меняется и регулируется с изменением в движении поршня (характеристика хода) для поршня 8, т.е., с изменением в позиции верхней мертвой точки и изменением в позиции нижней мертвой точки поршня 8.
[0022] Посредством механизма переменной степени сжатия, который использует вышеописанный многорычажный кривошипно-шатунный поршневой механизм, степень сжатия двигателя может быть оптимизирована в зависимости от режима работы двигателя. Это способствует улучшенной топливной экономичности и улучшенной выходной мощности. Дополнительно, в случае такого многорычажного кривошипно-шатунного поршневого механизма характеристика хода поршня (см. фиг. 4) сама может быть оптимизирована более близко к характеристике, практически соответствующей простому гармоническому движению, по сравнению с однорычажным механизмом, в котором поршень и шатунная шейка соединяются друг с другом через один рычаг. Также длина хода поршня относительно кривошипа коленчатого вала может быть увеличена по сравнению с однорычажным механизмом. Это способствует укороченной общей высоте двигателя и увеличенной степени сжатия. Кроме того, осевая нагрузка, действующая на поршень 8 или цилиндр 7, может быть уменьшена и соответственно отрегулирована посредством оптимизации наклона верхнего рычага 42. Это способствует легкому весу поршня 8 или цилиндра 7.
[0023] В качестве примера, как показано на фиг. 5, механизм 9 переменной степени сжатия конфигурируется так, что скорость изменения степени сжатия при высокой степени сжатия задается более высокой, чем скорость изменения степени сжатия при низкой степени сжатия, принимая во внимание детонацию, которая может возникать кратковременно вследствие задержки изменения степени сжатия с высокой степени сжатия на низкую степень сжатия. Конкретно, по сравнению с заданием скорости изменения степени сжатия в позиции низкой степени сжатия, в случае задания скорости изменения степени сжатия при высокой степени сжатия, угол между центральной линией рычага для управляющего рычага 45 и линией децентрирования, соединяющей центр вращения вала 43 управления и центр эксцентрического фрагмента 44 вала, становится почти прямым углом. Поэтому, длина плеча момента увеличивается, и, таким образом, крутящий момент, создаваемый электродвигателем 31, увеличивается, и, в результате, скорость изменения степени сжатия увеличивается.
[0024] В двигателе 1 внутреннего сгорания варианта осуществления, который обсужден выше, объем всасываемого воздуха, втянутый в цилиндр 7 после предписанного времени Tact, соответствующего времени задержки реакции механизма 9 переменной степени сжатия, прогнозируется, целевая степень ε(t+Tact) сжатия по истечение предписанного времени Tact с текущего момента времени вычисляется из прогнозируемого объема всасываемого воздуха, и затем электромотор 31, который приводит в действие механизм 9 переменной степени сжатия регулируется так, чтобы приводить фактическую степень εr(t+Tact) сжатия после предписанного времени Tact в соответствие с целевой степенью ε(t+Tact) сжатия после предписанного времени Tact.
[0025] Фиг. 6 - это временная диаграмма, иллюстрирующая изменение в эффективности наддува и изменение в степени сжатия в течение переходного периода. Во время t0, когда педаль акселератора нажимается водителем, объем всасываемого воздуха увеличивается, и, таким образом, эффективность (ITAC) наддува увеличивается, как показано характеристической кривой L1. Также, с нажатием педали акселератора водителем, режим работы изменяется с режима низкой нагрузки на режим высокой нагрузки, и, таким образом, целевая степень сжатия изменяется, как указано характеристической кривой L2 вследствие изменения в эффективности (ITAC) наддува. Целевая степень сжатия (т.е., характеристическая кривая L2) устанавливается в такое значение, что ненормальное сгорание, такое как детонация, преждевременное зажигание, пропуски зажигания и т.п., могут быть предотвращены до возникновения.
[0026] Однако, когда вышеупомянутая целевая степень сжатия (характеристическая кривая L2) используется в качестве управляющей команды для механизма 9 переменной степени сжатия (т.е., управляющей команды электромотору 31), вследствие задержки реакции механизма 9 переменной степени сжатия временная степень сжатия не может следовать точно целевой степени сжатия, как оценивается из характеристической кривой L3, указанной прерывистой линией. Таким образом, детонация вероятно может возникать.
[0027] Поэтому, в двигателе 1 внутреннего сгорания варианта осуществления, прежде всего, объем всасываемого воздуха, втянутый в цилиндр 7 после предписанного времени Tact, соответствующего времени задержки реакции механизма 9 переменной степени сжатия, прогнозируется. Характеристическая кривая L4 на фиг. 6 представляет объем всасываемого воздуха, втянутый в цилиндр 7, после того как предписанное время Tact истекло с текущего момента времени. После этого, целевая степень ε(t+Tact) сжатия по истечение предписанного времени Tact с текущего момента времени вычисляется из прогнозируемого объема всасываемого воздуха, втянутого в цилиндр по истечение предписанного времени Tact с текущего момента времени, и затем управляющая команда (t) электродвигателю 31, который приводит в действие механизм 9 переменной степени сжатия, вычисляется с тем, чтобы приводить фактическую степень εr(t+Tact) сжатия после предписанного времени Tact в соответствие с целевой степенью ε(t+Tact) сжатия после предписанного времени Tact. Характеристическая кривая L5 на фиг. 6 соответствует управляющей команде (t) для электромотора 31, причем эта команда преобразуется в степень сжатия.
[0028] Когда электромотор 31 управляется на основе управляющей команды (t), указанной посредством характеристической кривой L5, фактическая степень сжатия изменяется, как указано характеристической кривой L6 на фиг. 6. Следовательно, даже в случае, когда переходная быстрота реакции изменения объема всасываемого воздуха превосходит переходную быстроту реакции изменения степени сжатия вследствие задержки реакции изменения степени сжатия в течение переходного периода, фактическая степень сжатия (характеристическая кривая L6) не превышает целевую степень сжатия (характеристическая кривая L2). Таким образом, представляется возможным вынуждать фактическую степень сжатия (характеристическая кривая L6) следовать точно целевой степени сжатия (характеристическая кривая L2). Дополнительно, посредством улучшенной точности регулирования степени сжатия представляется возможным предотвращать возникновение детонации в течение переходного периода.
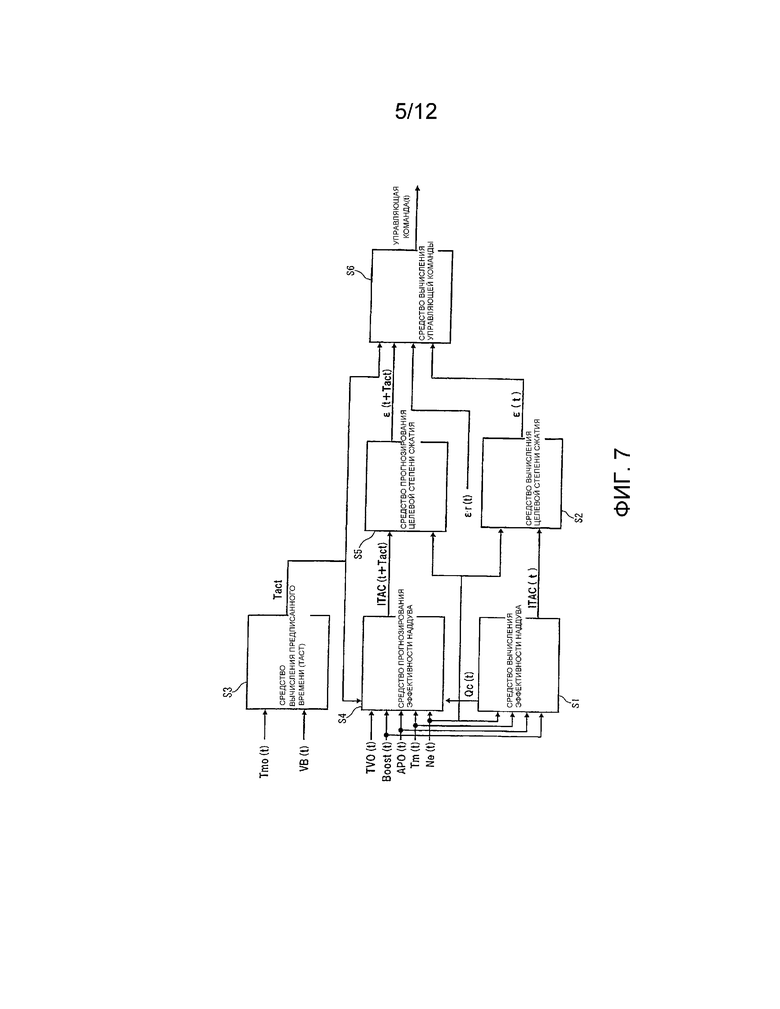
[0029] Фиг. 7 - это блок-схема, схематично иллюстрирующая последовательность операций управления для механизма 9 переменной степени сжатия.
[0030] Этап S1 обозначает средство вычисления эффективности наддува (детализировано позже) для вычисления текущей эффективности ITAC(t) наддува и текущего объема Qc(t) всасываемого воздуха, втянутого в цилиндр 7, на основе давления Boost(t) всасываемого воздуха, определенного посредством датчика 18 давления всасываемого воздуха, открытия APO(t) акселератора, определенного посредством датчика 29 открытия акселератора, температуры Tm(t) всасываемого воздуха, определенной посредством датчика 19 температуры всасываемого воздуха, и скорости Ne(t) вращения двигателя, определенной посредством датчика 27 угла поворота коленчатого вала.
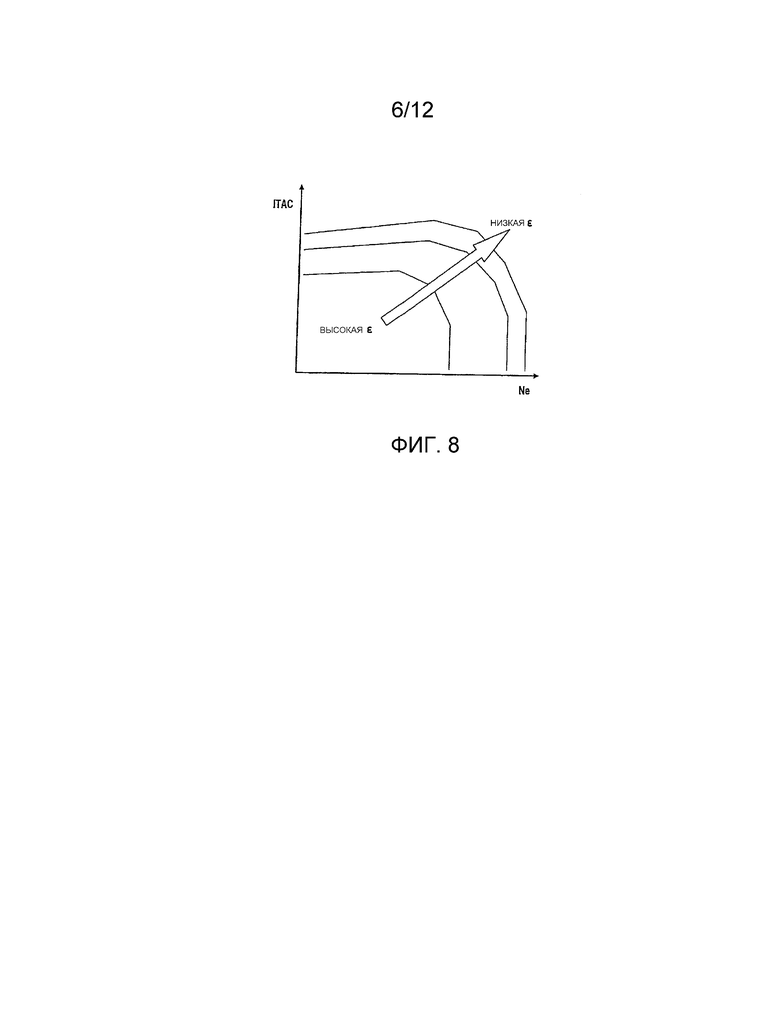
[0031] Этап S2 обозначает средство вычисления целевой степени сжатия (детализировано позже) для вычисления целевой степени ε(t) сжатия на основе эффективности ITAC(t) наддува, вычисленной на этапе S1, и скорости Ne(t) вращения двигателя, определенной посредством датчика 27 угла поворота коленчатого вала. Целевая степень ε(t) сжатия задается, чтобы становиться более низкой, когда режим работы смещается к более высокой нагрузке или более высокой скорости, с помощью соответствия для вычисления целевой степени сжатия, которое показано на фиг. 8, например.
[0032] Этап S3 обозначает средство вычисления предписанного времени (детализировано позже) для вычисления предписанного времени Tact на основе температуры Tmo(t) электромотора, определенной посредством датчика 33 температуры электромотора, и напряжения VB(t) питания, определенного посредством датчика 34 напряжения питания. Предписанное время Tact - это время, соответствующее времени задержки реакции механизма 9 переменной степени сжатия. Например, предписанное время - это интервал времени, такой как приблизительно 200 миллисекунд. В качестве примера, предписанное время Tact может быть задано во время, более длительное, чем время задержки реакции механизма 9 переменной степени сжатия.
[0033] Этап S4 обозначает средство прогнозирования эффективности наддува (детализировано позже) для вычисления прогнозируемой эффективности ITAC (t+Tact) наддува по истечение предписанного времени Tact с текущего момента времени на основе давления Boost(t) всасываемого воздуха, открытия APO(t) акселератора, температуры Tm(t) всасываемого воздуха, скорости Ne(t) вращения двигателя, открытия TVO(t) дросселя, объема Qc(t) всасываемого воздуха, вычисленного на этапе S1, и предписанного времени Tact, вычисленного на этапе S3.
[0034] Этап S5 обозначает средство прогнозирования целевой степени сжатия (детализировано позже) для вычисления прогнозируемой целевой степени ε(t+Tact) сжатия после предписанного времени Tact на основе прогнозируемой эффективности ITAC(t+Tact) наддува, вычисленной на этапе S4, и скорости Ne(t) вращения двигателя. Прогнозируемая целевая степень ε(t+Tact) сжатия задается, чтобы становиться более низкой, когда режим работы смещается к более высокой нагрузке или более высокой скорости, с помощью соответствия для вычисления целевой степени сжатия, которое показано на фиг. 8, например.
[0035] Этап S6 обозначает средство вычисления управляющей команды (детализировано позже) для вычисления управляющей команды (t) электромотору 31, который приводит в действие механизм 9 переменной степени сжатия, на основе целевой степени ε(t) сжатия, вычисленной на этапе S2. прогнозируемого времени Tact, вычисленного на этапе S3, прогнозируемой целевой степени ε(t+Tact) сжатия, вычисленной на этапе S5, и текущей фактической степени εr(t) сжатия, определенной посредством датчика 32 угла поворота электромотора. В качестве примера, управляющая команда (t) соответствует ранее обсужденной характеристической кривой L5 на фиг. 6.
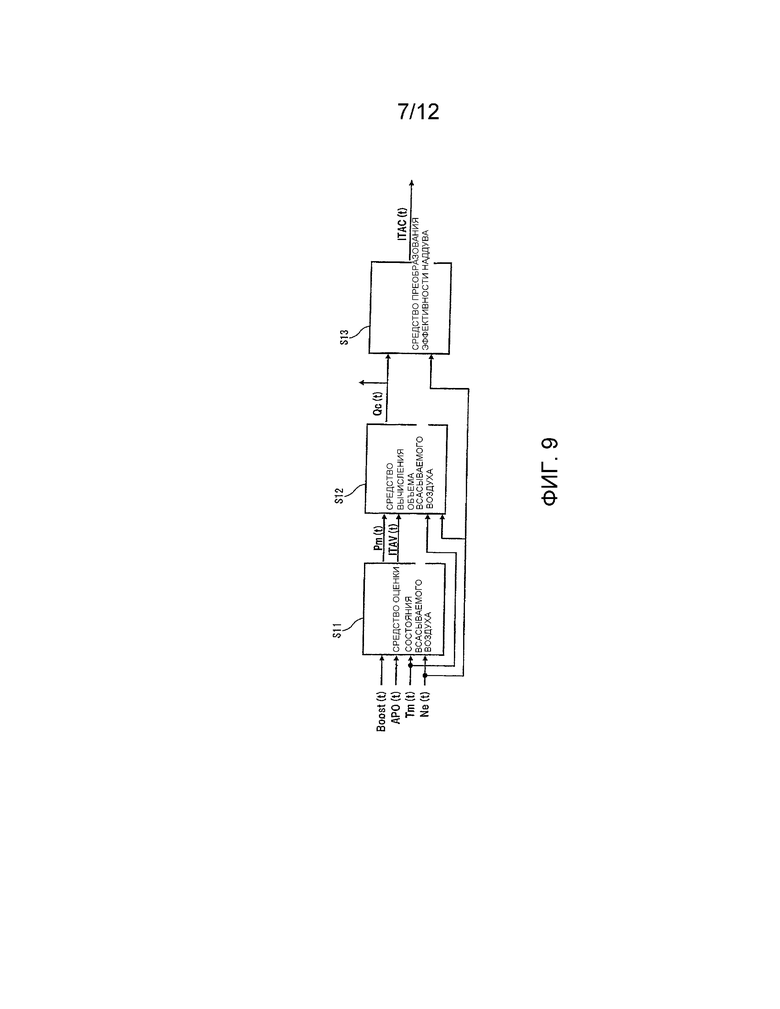
[0036] Ранее обсужденное средство вычисления эффективности наддува (этап S1 на фиг. 7) описывается ниже подробно с помощью фиг. 9.
[0037] Этап S11 обозначает средство оценки состояния всасываемого воздуха для вычисления оценочного значения Pm(t) отрицательного давления на впуске и оценочного значения ITAV(t) объемной эффективности на основе давления Boost(t) всасываемого воздуха, открытия APO(t) акселератора, температуры Tm(t) всасываемого воздуха и скорости Ne(t) вращения двигателя. Этап S12 обозначает средство вычисления объема всасываемого воздуха для вычисления объема Qc(t) всасываемого воздуха, втянутого в цилиндр 7, на основе температуры Tm(t) всасываемого воздуха, скорости Ne(t) вращения двигателя и оценочного значения Pm(t) отрицательного давления на впуске и оценочного значения ITAV(t) объемной эффективности, оба вычислены на этапе S11. После этого, предположим, что объемная вместимость цилиндра 7 обозначается как "Vc" (фиксированное значение), газовая постоянная обозначается как "R", скорость Ne(t) вращения двигателя (единица измерения: об./мин.) преобразуется в единицах измерения в угловую скорость ω (единица измерения: рад./с), объем Qc(t) всасываемого воздуха вычисляется посредством следующего арифметического выражения (1).
[0038] Математическое выражение 1

[0039] Этап S13 обозначает средство преобразования эффективности наддува для вычисления эффективности ITAC(t) заряда на основе скорости Ne(t) вращения двигателя и объема Qc(t) всасываемого воздуха, вычисленных на этапе S12.
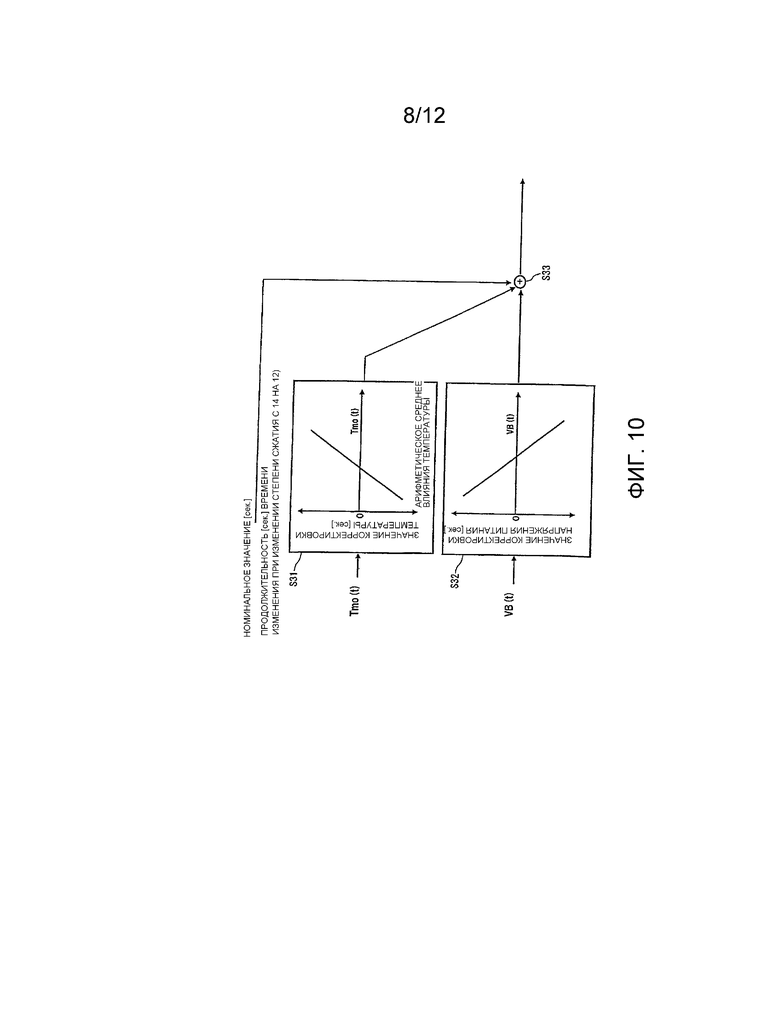
[0040] Ранее обсужденное средство вычисления предписанного времени (этап S3 на фиг. 7) описывается ниже подробно с помощью фиг. 10.
[0041] На быстроту реакции электромотора 31, который приводит в действие механизм 9 переменной степени сжатия, оказывает влияние температурный режим электромотора 31 и напряжение питания электромотора 31. Поэтому, предписанное время Tact, соответствующее времени реакции механизма 9 переменной степени сжатия, вычисляется посредством корректировки его номинального значения (фиксированного значения), на основе температуры электромотора 31 и напряжения питания электромотора 31. После этого, вышеупомянутое номинальное значение рассматривается как эквивалентное времени изменения степени сжатия, когда степень сжатия изменяется вследствие нажатия педали акселератора водителем. В показанном варианте осуществления номинальное значение задается в продолжительность времени, когда степень сжатия изменяется с "14" на "12" через механизм 9 переменной степени сжатия в предписанном состоянии.
[0042] Этап S31 обозначает средство вычисления значения корректировки температуры для вычисления значения корректировки температуры на основе температуры Tmo(t) электромотора с помощью предварительно заданного соответствия.
[0043] Например, значение корректировки температуры задается, чтобы становиться "0" (т.е., без корректировки), когда температура Tmo(t) электромотора является предварительно определенной опорной температурой, и чтобы становиться положительным значением, когда температура Tmo(t) электромотора выше предварительно определенной опорной температуры, и становиться отрицательным значением, когда температура Tmo(t) электромотора ниже предварительно определенной опорной температуры. Значение корректировки температуры вычисляется так, что предписанное время Tact продлевается, когда температура Tmo(t) электромотора увеличивается от предварительно определенной опорной температуры. Также, значение корректировки температуры вычисляется так, что предписанное время Tact сокращается, когда температура Tmo(t) электромотора уменьшается от предварительно определенной опорной температуры. В качестве примера, при вычислении значения корректировки температуры, вместо использования температуры Tmo(t) электромотора, может быть использована температура Tw(t) охлаждающей жидкости двигателя 1 внутреннего сгорания.
[0044] Этап S32 обозначает средство вычисления значения корректировки напряжения для вычисления значения корректировки напряжения на основе напряжения VB(t) питания с помощью предварительно заданного соответствия.
[0045] Например, значение корректировки напряжения задается, чтобы становиться "0" (т.е., без корректировки), когда напряжение VB(t) питания является предварительно определенным опорным напряжением, и становиться отрицательным значением, когда напряжение VB(t) питания выше предварительно определенного опорного напряжения, и становиться положительным значением, когда напряжение VB(t) питания ниже предварительно определенного опорного напряжения. Значение корректировки напряжения вычисляется так, что предписанное время Tact сокращается, когда напряжение VB(t) питания увеличивается от предварительно определенного опорного напряжения. Также, значение корректировки напряжения вычисляется так, что предписанное время Tact удлиняется, когда напряжение VB(t) питания уменьшается от предварительно определенного опорного напряжения.
[0046] На этапе S33 номинальное значение, которое является фиксированным значением, корректируется как посредством температуры корректировки температуры, вычисленного на этапе S31, так и посредством значения корректировки напряжения, вычисленного на этапе S32, с тем, чтобы вычислять предписанное время Tact.
[0047] Ранее обсужденное средство прогнозирования эффективности наддува (этап S4 на фиг. 7) описывается здесь подробно с помощью фиг. 11.
[0048] Этап S41 обозначает средство оценки состояния всасываемого воздуха для вычисления оценочного значения Pm(t) отрицательного значения на впуске, оценочного значения ITAV(t) объемной эффективности и значения Cv(t) сопротивления, которое является сопротивлением на впуске в системе впуска, на основе давления Boost(t) всасываемого воздуха, открытия APO(t) акселератора, температуры Tm(t) всасываемого воздуха и скорости Ne(t) вращения двигателя. На этапе S41 значение Pm(t) оценки отрицательного давления на впуске, оценочное значение ITAV(t) объемной эффективности и значение Cv(t) сопротивления вычисляются так, что давление Boost(t) всасываемого воздуха и оценочное значение Pm(t) отрицательного давления на впуске становятся идентичными друг другу, с помощью общей физической модели системы впуска. В качестве примера, давление Boost(t) всасываемого воздуха может быть выведено с этапа S41 на этап S42 вместо оценочного значения Pm(t) отрицательного давления на впуске.
[0049] Этап S42 обозначает средство вычисления прогнозируемого объема всасываемого воздуха для вычисления прогнозируемого объема Qc(t+Tact) всасываемого воздуха, втянутого в цилиндр 7 по истечение предписанного времени Tact от текущего момента времени, на основе открытия TVO(t) дросселя, температуры Tm(t) всасываемого воздуха, скорости Ne(t) вращения двигателя, объема Qc(t) всасываемого воздуха, вычисленного на этапе S1, предписанного времени Tact, вычисленного на этапе S3, оценочного значения Pm(t) отрицательного давления на впуске и оценочного значения ITAV(t) объемной эффективности и значения Cv(t) сопротивления, вычисленных на этапе S41, с помощью общей физической модели.
[0050] Этап S43 обозначает средство преобразования прогнозируемой эффективности наддува для вычисления прогнозируемой эффективности ITAC(t+Tact) наддува по истечение предписанного времени Tact с текущего момента времени на основе скорости Ne(t) вращения двигателя, прогнозируемого объема Qc(t+Tact) всасываемого воздуха, вычисленного на этапе S42.
[0051] Ранее описанное средство вычисления прогнозируемого объема всасываемого воздуха (этап S42 на фиг. 11) ниже описывается подробно с помощью фиг. 12.
[0052] На этапе S101 объем Qc(t) всасываемого воздуха, открытие TVC(t) дросселя, предписанное время Tact, оценочное значение Pm(t) отрицательного давления на впуске, оценочное значение ITAV(t) объемной эффективности, значение Cv(t) сопротивления, температура Tm(t) всасываемого воздуха и скорость Ne(t) вращения двигателя считываются.
[0053] На этапе S102 первоначальное значение для оценочного значения отрицательного давления на впуске задается как Pm(t). На этапе S103 первоначальное значение ITAV(0) оценочного значения объемной эффективности задается как ITAV(t). На этапе S104 первоначальное значение для значения Cv(0) сопротивления задается как Cv(t). На этапе S105 первоначальное значение времени i задается как "0".
[0054] На этапе S106 выполняется проверка, чтобы определять, достигает ли время "i" предписанного времени Tact. Когда время "i" не достигает предписанного времени Tact, программа переходит к этапу S107. Наоборот, когда время "i" достигает предписанного времени Tact, программа переходит к этапу S110. На этапе S107 время увеличивается или прибавляется на время ΔT, которое является фиксированным значением, и затем программа переходит к этапу S108.
[0055] На этапе S108 вычисляется значение ΔPm. Предположим, что объемная вместительность коллектора 12 для всасываемого воздуха обозначается как "Vm", газовая постоянная обозначается как "R", а объем всасываемого воздуха, проходящего через дроссель, обозначается как "Qt", значение ΔPm вычисляется посредством следующего арифметического выражения (2).
[0056] Математическое выражение 2

[0057] В качестве примера, предположим, что атмосферное давление обозначается как "P0", а площадь открытия дросселя, вычисленная из открытия TVO(t) дросселя, обозначается как "A(t)", объем Qt всасываемого воздуха, проходящего через дроссель, в вышеприведенном выражении (2) вычисляется посредством следующего арифметического выражения (3).
[0058] Математическое выражение 3

[0059] Кроме того, предположим, что отношение удельных теплоемкостей обозначается как "k", а значение подстройки обозначается как "Const", значение θ(t) в вышеприведенном выражении (3) представлено следующими арифметическими выражениями (4) и (5).
[0060] Математическое выражение 4

[0061] Математическое выражение 5

[0062] На этапе S109 оценочное значение Pm(i) отрицательного давления на впуске, после того как время "i" истекло, задается как суммированное значение, полученное посредством добавления значения ΔPm, вычисленного в настоящий момент на этапе S108, к предыдущему значению Pm(i-1), и затем программа переходит к этапу S106.
[0063] На этапе S110 оценочное значение Pm(t+Tact) отрицательного давления на впуске по истечение предписанного времени Tact от текущего момента времени задается как самое последнее оценочное значение Pm(i) отрицательного давления на впуске, вычисленное на этапе S109, и затем программа переходит к этапу S111.
[0064] На этапе S111 прогнозируемый объем Qc(t+Tact) всасываемого воздуха по истечение предписанного времени Tact от текущего момента времени вычисляется из оценочного значения Pm(t+Tact) отрицательного давления на впуске, вычисленного на этапе S110.
[0065] Ранее обсужденное средство вычисления управляющей команды (этап S6 на фиг. 7) описывается ниже подробно с помощью фиг. 13.
[0066] Этап S61 обозначает средство прогнозирования реакции электромотора для вычисления фактической степени εr(t+Tact) сжатия по истечение предписанного времени Tact от текущего момента времени на основе текущей фактической степени εr(t) сжатия, определенной посредством датчика 32 угла поворота электромотора, и целевой степени ε(t) сжатия, вычисленной на этапе S2, с помощью общей физической модели.
[0067] На этапе S62 результат вычитания, полученный вычитанием фактической степени εr(t+Tact) сжатия, вычисленной на этапе S61, из прогнозируемой целевой степени ε(t+Tact) сжатия, вычисленной на этапе S5, выводится на этап S64.
[0068] На этапе S63 вычисляется переходное изменение Δε степени сжатия с помощью предписанного времени Tact, вычисленного на этапе S3. Например, в случае механизма 9 переменной степени сжатия, сконфигурированного, чтобы изменять степень сжатия с "14" на "8", изменение Δε степени сжатия может быть вычислено посредством вычисления того, насколько степень сжатия после предписанного времени (Tact) изменилась при ступенчатом изменении степени сжатия, которая является целевым значением, на "8" из состояния, когда фактическая степень сжатия равна "14".
[0069] Конкретно, изменение Δε степени сжатия может быть вычислено с помощью графика реакции изменения степени сжатия, который показан на фиг. 14. Фиг. 14 показывает изменение в степени сжатия, измененной через механизм 9 переменной степени сжатия при ступенчатом переключении степени сжатия, которая является целевым значением, на "8" из состояния, когда фактическая степень сжатия равна "14". Степень сжатия по истечение предписанного времени (Tact) с момента времени, когда ступенчатое переключение целевого значения степени сжатия на "8" было инициировано, равна "S(Tact)". Изменение Δε степени сжатия, которое является контрольным значением количественной величины действия механизма переменной степени сжатия, может быть вычислено вычитанием "S(Tact)" из "14" (т.е., Δε=(максимальная степень сжатия)-S(Tact)).
[0070] На этапе S64 результат деления, полученный делением выходного значения с этапа S62, на изменение Δε степени сжатия, вычисленное на этапе S63, выводится на этап S65.
[0071] На этапе S65 результат сложения, полученный сложением выходного значения с этапа S64 с целевой степенью ε(t) сжатия, вычисленной на этапе S2, выводится в качестве управляющей команды (t) электромотору 31, который приводит в действие механизм 9 переменной степени сжатия.
[0072] Т.е., когда механизм 9 переменной степени сжатия управляется при текущей целевой степени ε(t) сжатия, средство вычисления управляющей команды вычисляет управляющую команду (t) для электромотора 31 в ответ на разницу между фактической степенью εr(t+Tact) сжатия после предписанного времени Tact и предписанной целевой степенью ε(t+Tact) сжатия после предписанного времени Tact.
[0073] Например, в качестве механизма 4 привода клапана на стороне впускного клапана, регулируемый механизм привода клапана, сконфигурированный, чтобы изменять момент открытия клапана и момент закрытия клапана для впускного клапана 2, может быть использован. В этом случае, при вычислении прогнозируемой эффективности ITAC(t+Tact) наддува информация о моменте открытия клапана и моменте закрытия клапана для впускного клапана 2 также необходима, и, следовательно, информация о моменте открытия клапана и моменте закрытия клапана для впускного клапана 2 должна быть введена в ранее обсужденное средство прогнозирования эффективности наддува (этап S4 на фиг. 7).
[0074] В вышеописанном варианте осуществления, при вычислении прогнозируемого объема Qc(t+Tact) всасываемого воздуха или объема Qc(t) всасываемого воздуха используется открытие TVO(t) дросселя (или открытие акселератора). Прогнозируемый объем Qc(t+Tact) всасываемого воздуха или объем Qc(t) всасываемого воздуха может быть вычислен на основе обнаруженного значения, обнаруженного посредством датчика 25 давления в коллекторе, вместо открытия TVO(t) дросселя. В этом случае, отрицательное давление на впуске может быть обнаружено непосредственно посредством ранее отмеченного датчика, и, таким образом, возможно вычислять прогнозируемый объем Qc(t+Tact) всасываемого воздуха или объем Qc(t) всасываемого воздуха точно. Поэтому, возможно вычислять управляющую команду (t) для электромотора 31 точно, и, как результат, представляется возможным вынуждать фактическую степень сжатия следовать точно целевой степени сжатия.
Настоящее изобретение относится к устройству управления двигателем внутреннего сгорания и способу управления для двигателя внутреннего сгорания. Целевая степень ε(t+Tact) сжатия, после того как предписанное время Tact истекло с текущего момента времени, вычисляется из объема всасываемого воздуха, втянутого в цилиндр (7) по истечении предписанного времени Tact с текущего момента времени. Управляющая команда (t) для электромотора (31), который приводит в действие механизм (9) переменной степени сжатия, вычисляется так, чтобы приводить фактическую степень εr(t+Tact) сжатия после предписанного времени Tact в соответствие с целевой степенью ε(t+Tact) сжатия после предписанного времени Tact. Это предоставляет возможность фактической степени сжатия точно следовать целевой степени сжатия. Техническим результатом является улучшение топливной экономичности и улучшение выходной мощности. 2 н. и 7 з.п. ф-лы, 14 ил.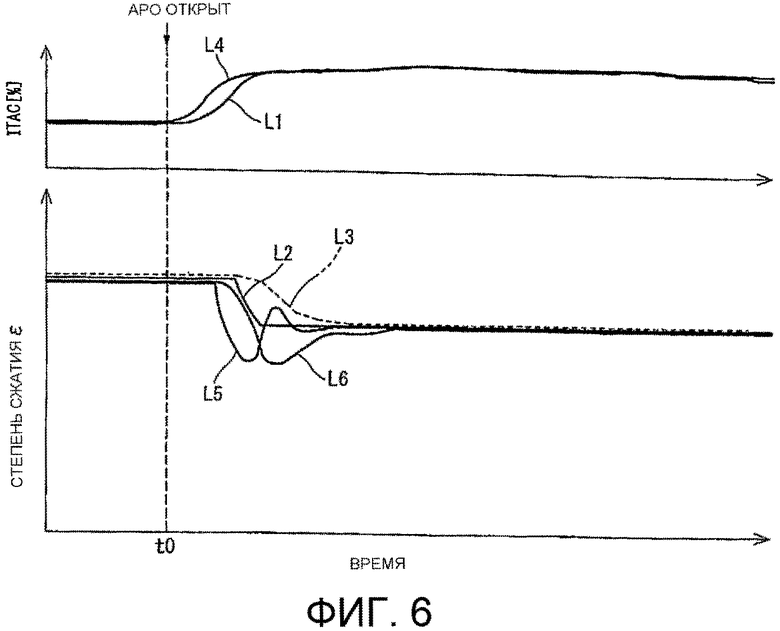
1. Устройство управления двигателем внутреннего сгорания, содержащее:
механизм переменной степени сжатия, сконфигурированный, чтобы изменять степень сжатия двигателя внутреннего сгорания;
средство вычисления прогнозируемого объема всасываемого воздуха для вычисления, на основе нагрузки двигателя для двигателя внутреннего сгорания, прогнозируемого объема всасываемого воздуха, после того как предписанное время истекло с текущего момента времени;
средство вычисления целевой степени сжатия для вычисления, на основе прогнозируемого объема всасываемого воздуха, вычисленного средством вычисления прогнозируемого объема всасываемого воздуха, целевой степени сжатия после истечения предписанного времени с текущего момента времени; и
средство вычисления управляющей команды для вычисления управляющей команды механизму переменной степени сжатия с тем, чтобы приводить фактическую степень сжатия в соответствие с целевой степенью сжатия.
2. Устройство управления двигателем внутреннего сгорания по п. 1, при этом:
нагрузка двигателя вычисляется на основе открытия акселератора.
3. Устройство управления двигателем внутреннего сгорания по п. 1 или 2, при этом:
предписанное время является временем, более длительным, чем время задержки реакции механизма переменной степени сжатия.
4. Устройство управления двигателем внутреннего сгорания по п. 1 или 2, при этом:
прогнозируемый объем всасываемого воздуха вычисляется на основе по меньшей мере одного из текущего открытия акселератора и текущего отрицательного давления на впуске.
5. Устройство управления двигателем внутреннего сгорания по п. 1 или 2, при этом:
целевая степень сжатия задается в степень сжатия так, что возникновение ненормального сгорания может быть предотвращено для прогнозируемого объема всасываемого воздуха.
6. Устройство управления двигателем внутреннего сгорания по п. 1 или 2, дополнительно содержащее:
электромотор, который приводит в действие механизм переменной степени сжатия,
при этом предписанное время корректируется в зависимости от режима работы электромотора.
7. Устройство управления двигателем внутреннего сгорания по п. 6, при этом:
предписанное время корректируется в зависимости от температурного режима работы электромотора.
8. Устройство управления двигателем внутреннего сгорания по п. 6, при этом:
предписанное время корректируется в зависимости от условия по напряжению питания электромотора.
9. Способ управления для двигателя внутреннего сгорания, оснащенного механизмом переменной степени сжатия, сконфигурированным, чтобы изменять степень сжатия двигателя внутреннего сгорания, содержащий этапы, на которых:
вычисляют, на основе нагрузки двигателя для двигателя внутреннего сгорания, прогнозируемый объем всасываемого воздуха, после того как предписанное время истекло с текущего момента времени;
вычисляют, на основе прогнозируемого объема всасываемого воздуха, целевую степень сжатия после истечения предписанного времени с текущего момента времени;
вычисляют управляющую команду для механизма переменной степени сжатия с тем, чтобы приводить фактическую степень сжатия в соответствие с целевой степенью сжатия; и
управляют механизмом переменной степени сжатия на основе управляющей команды.
| JP 2006183604 A, 13.07.2006 | |||
| JP 11062673 A, 05.03.1999 | |||
| JP 2005155507 A, 16.06.2005 | |||
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ЗАЖИГАНИЕМ ИСКРОВОГО ТИПА | 2007 |
|
RU2404368C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ОБЪЕМА КАМЕРЫ СГОРАНИЯ И СТЕПЕНИ СЖАТИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2001 |
|
RU2206773C1 |

