ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к области беспроводной зарядки и, в частности, к устройству беспроводной зарядки, системе беспроводной зарядки, способу управления беспроводной зарядкой, зарядному оборудованию и носителю данных.
УРОВЕНЬ ТЕХНИКИ
[0002] С развитием смартфонов традиционная технология проводной зарядки испытывает трудности с удовлетворением потребностей пользователей в удобстве, поэтому технология беспроводной зарядки постепенно привлекает внимание.
[0003] В технологии беспроводной зарядки передающая сторона излучает электромагнитную волну путем преобразования электрического сигнала в электромагнитную волну, а приемная сторона принимает электромагнитную волну и преобразует ее в электрический сигнал для вывода на батарею.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Настоящее изобретение предлагает беспроводное зарядное устройство, беспроводную систему зарядки, способ управления беспроводной зарядкой, зарядное оборудование и носитель данных, которые могут повысить эффективность беспроводной зарядки.
[0005] В одном аспекте предлагается беспроводное зарядное устройство, и это беспроводное зарядное устройство содержит:
[0006] схему источника питания, выполненную с возможностью предоставления сигнала переменного тока;
[0007] передающую катушку, выполненную с возможностью преобразовывать сигнал переменного тока в электромагнитные волны для излучения на приемную сторону;
[0008] множество детектирующих катушек, расположенных с возможностью разнесения по окружности вокруг передающей катушки, причем множество детектирующих катушек образует круговую дорожку, которая является концентрической по отношению к передающей катушке, а детектирующие катушки выполнены с возможностью излучать энергию на приемную катушку принимающей стороны и генерировать индукционный сигнал;
[0009] подвижный держатель катушек, при этом передающая катушка и множество детектирующих катушек расположены на подвижном держателе катушек;
[0010] приводной механизм, соединенный с подвижным держателем катушек и выполненный с возможностью приведения в движение подвижного держателя катушек;
[0011] контроллер, выполненный с возможностью получать индукционные сигналы множества детектирующих катушек и управлять положением подвижного держателя катушек посредством управления приводным механизмом на основе индукционных сигналов множества детектирующих катушек.
[0012] В варианте осуществления настоящего изобретения множество детектирующих катушек расположены на расстоянии друг от друга вокруг передающей катушки для генерирования индукционного сигнала в отношении приемной катушки, и можно определить, выровнены ли приемная катушка и передающая катушка в соответствии с множеством индукционных сигналов, так как величина индукционного сигнала связана с расстоянием. Когда приемная катушка и передающая катушка не выровнены, положение подвижного держателя катушек может управляться контроллером для выравнивания приемной катушки и передающей катушки, чтобы повысить эффективность зарядки для беспроводной зарядки. Между тем, поскольку детектирующая катушка расположена вокруг передающей катушки, а не расположена между передающей катушкой и приемной катушкой, между передающей катушкой и приемной катушкой не возникает вихревой ток, то есть нет влияния на энергию передачи между передающей катушкой и приемной катушкой.
[0013] В реализации варианта осуществления настоящего изобретения детектирующая катушка представляет собой закругленную прямоугольную катушку с 2-3 витками, и при этом закругленная прямоугольная катушка имеет направление длины, которое проходит через центр передающей катушки.
[0014] В этой реализации в качестве детектирующей катушки используется закругленная прямоугольная катушка с 2-3 витками. С одной стороны, она может быть сконструирована достаточно маленькой, так что даже если предусмотрено множество детектирующих катушек, все беспроводное зарядное устройство не будет иметь слишком большой размер. С другой стороны, эта закругленная прямоугольная конструкция позволяет излучению энергии между детектирующей катушкой и приемной катушкой генерировать индукционный сигнал.
[0015] В реализации варианта осуществления настоящего изобретения множество детектирующих катушек расположено попарно, множество пар детектирующих катушек расположено так, чтобы они были равномерно распределены, и каждая пара детектирующих катушек симметрична относительно передающей катушки.
[0016] В этой реализации множество детектирующих катушек расположены попарно, и каждая пара детектирующих катушек расположена симметрично относительно передающих катушек, так что контроллер может определять положение приемной катушки на основе сигналов каждой пары детектирующих катушек.
[0017] В реализации варианта осуществления настоящего изобретения контроллер выполнен с возможностью сравнивать разность амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек; когда разность амплитуд между двумя индукционными сигналами, детектируемыми по меньшей мере одной парой детектирующих катушек, превышает пороговое значение, положение подвижного держателя катушек перемещается на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек.
[0018] В этой реализации амплитуда индукционного сигнала каждой пары детектирующих катушек представляет собой расстояние между приемной катушкой и двумя детектирующими катушками. Если разность между двумя амплитудами индукционных сигналов каждой пары детектирующих катушек больше порогового значения, тогда указывается, что приемная катушка и передающая катушка не выровнены в направлении пары детектирующих катушек, так что положение подвижного держателя катушек необходимо переместить, чтобы выровнять приемную катушку и передающую катушку.
[0019] В реализации варианта осуществления настоящего изобретения контроллер выполнен с возможностью определять, на основе разности амплитуд между индукционными сигналами пары детектирующих катушек, расстояние направления подвижного держателя катушек при перемещении в направлении, в котором расположена эта одна пара детектирующих катушек; и выполнен с возможностью определять, на основе направления и расстояния для подвижного держателя катушек в направлении, в котором расположены все пары детектирующих катушек, направление перемещения и расстояние для подвижного держателя катушки.
[0020] В этой реализации смещение в направлении пары детектирующих катушек определяется в соответствии с разностью амплитуд индукционных сигналов каждой пары детектирующих катушек, таким образом определяется расстояние, на которое необходимо сделать перемещения. Затем расстояния, на которые должны быть сделаны перемещения в каждом направлении, объединяются для получения направления и расстояния для подвижного держателя катушек, на которое в конечном счете должно быть сделано перемещение. Перемещение в этом направлении и на это расстояние может устранить смещение в каждом направлении и максимизировать эффективность зарядки.
[0021] В реализации варианта осуществления настоящего изобретения контроллер дополнительно выполнен с возможностью сравнивать разности между амплитудой индукционного сигнала каждой детектирующей катушки и опорным значением, и, если любая разность между амплитудой и опорным значением превышает пороговое значение, то определяется, что имеется приемная катушка.
[0022] В этой реализации по амплитуде индукционного сигнала каждой детектирующей катушки может быть определено, снабжена ли текущая передающая катушка соответственно приемной катушкой. Только когда определено, что имеется приемная катушка, определяется, нужно ли перемещать передающую катушку, чтобы избежать перемещения без приемной катушки, что может привести к потере энергии.
[0023] В реализации варианта осуществления настоящего изобретения оба конца детектирующей катушки выполнены соответственно в виде входного конца для сигнала возбуждения и выходного конца для индукционного сигнала.
[0024] В этой реализации две детектирующие катушки используются в качестве входного конца для сигнала возбуждения и выходного конца для индукционного сигнала, соответственно. Сигнал возбуждения является входным сигналом и генерирует индукционный сигнал в приемной катушке, на основе которого настоящее изобретение определяет, выровнены ли передающая катушка и приемная катушка.
[0025] В реализации варианта осуществления настоящего изобретения между контроллером и каждым из входного конца для сигнала возбуждения и выходного конца для индукционного сигнала каждой из детектирующих катушек предусмотрен управляемый переключатель,
[0026] контроллер выполнен с возможностью циклически управлять управляемым переключателем, подключенным к каждой из детектирующих катушек, который должен включаться и выключаться, и в любое время включается только один управляемый переключатель, подключенный к одной из детектирующих катушек.
[0027] В этой реализации каждая из управляющих катушек циклически управляется с помощью управляемого переключателя, чтобы предотвратить одновременную работу каждой из катушек и взаимное влияние друг на друга. Между тем, поскольку каждая из детектирующих катушек управляется циклически, приемной катушкой и передающей катушкой можно управлять так, чтобы они выравнивались не только в начале зарядки, но также и во время зарядки.
[0028] В реализации варианта осуществления настоящего изобретения подвижный держатель катушек содержит:
[0029] монтажную плату, а передающая катушка и множество детектирующих катушек расположены на монтажной плате.
[0030] В этой реализации передающая катушка и детектирующая катушка располагаются на монтажной плате, и затем используется приводной механизм для управления их движением. С одной стороны, это облегчает миниатюризацию за счет интеграции катушек на монтажной плате. С другой стороны, катушкой легко управлять для перемещения за счет ее проектирования на монтажной плате.
[0031] В реализации варианта осуществления настоящего изобретения устройство дополнительно содержит:
[0032] модуль связи, выполненный с возможностью выполнять беспроводную связь с принимающей стороной для аутентификации приемной стороны;
[0033] контроллер, выполненный с возможностью управлять положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек, когда приемная сторона аутентифицирована.
[0034] В этой реализации приемная сторона аутентифицируется модулем связи, и когда аутентификация пройдена, положением подвижного держателя катушек управляют, чтобы предотвратить перемещение подвижного держателя катушек, когда приемная сторона является недействительной приемной стороной, которая впоследствии не заряжается, и предотвратить энергетические потери, которые происходят при этом.
[0035] В другом аспекте предлагается беспроводная система зарядки, и эта беспроводная система зарядки включает в себя передающую сторону и приемную сторону;
[0036] передающей стороной является любое вышеуказанное беспроводное зарядное устройство.
[0037] В другом аспекте предлагается способ управления беспроводной зарядкой, и этот способ применяют к устройству беспроводной зарядки, и этот способ управления беспроводной зарядкой включает в себя:
[0038] получение индукционных сигналов от множества детектирующих катушек;
[0039] управление положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек.
[0040] В реализации варианта осуществления настоящего изобретения множество детектирующих катушек расположено попарно, и пары детектирующих катушек расположены так, чтобы они были равномерно распределены, причем каждая пара детектирующих катушек является симметричной относительно передающей катушки. Кроме того, управление положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек включает в себя:
[0041] сравнение разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек; и когда разность амплитуд между двумя индукционными сигналами, детектируемыми по меньшей мере одной парой детектирующих катушек, превышает пороговое значение, перемещение положения подвижным держателем катушек на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек.
[0042] В реализации варианта осуществления настоящего изобретения перемещение положения подвижного держателя катушек на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек, включает в себя:
[0043] определение направления и расстояния для подвижного держателя катушек, движущегося в направлении, в котором расположена одна пара детектирующих катушек, на основе разности амплитуд между индукционными сигналами пары детектирующих катушек; и определение направления и расстояния перемещения подвижного держателя катушек на основе направления и расстояния для подвижного держателя катушек, движущегося в направлении, в котором расположены все пары детектирующих катушек.
[0044] В реализации варианта осуществления настоящего изобретения способ дополнительно включает в себя:
[0045] сравнение разности между амплитудой индукционного сигнала каждой детектирующей катушки и опорным значением, и, если какая-либо разность между амплитудой и опорным значением превышает пороговое значение, определяют, что имеется приемная катушка.
[0046] В реализации варианта осуществления настоящего изобретения способ дополнительно включает в себя:
[0047] выполнение беспроводной связи с приемной стороной для аутентификации приемной стороны;
[0048] управление положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек, когда приемная сторона аутентифицирована.
[0049] В другом аспекте предлагается зарядное оборудование, и это зарядное оборудование содержит:
[0050] процессор;
[0051] память для хранения исполняемых процессором команд;
[0052] причем процессор выполнен с возможностью выполнять любой вышеупомянутый способ управления беспроводной зарядкой.
[0053] В другом аспекте предлагается машиночитаемый носитель данных с сохраненными на нем компьютерными командами, и компьютерные команды выполняются процессором для реализации любого вышеупомянутого способа управления беспроводной зарядкой.
[0054] Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются только иллюстративными и пояснительными и не ограничивают изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0055] Прилагаемые чертежи, которые включены в состав данного описания и составляют его часть, иллюстрируют варианты осуществления настоящего изобретения и вместе с описанием служат для объяснения принципов изобретения.
[0056] Фиг. 1 представляет схематический структурный вид беспроводной зарядной системы, показанной в настоящем изобретении;
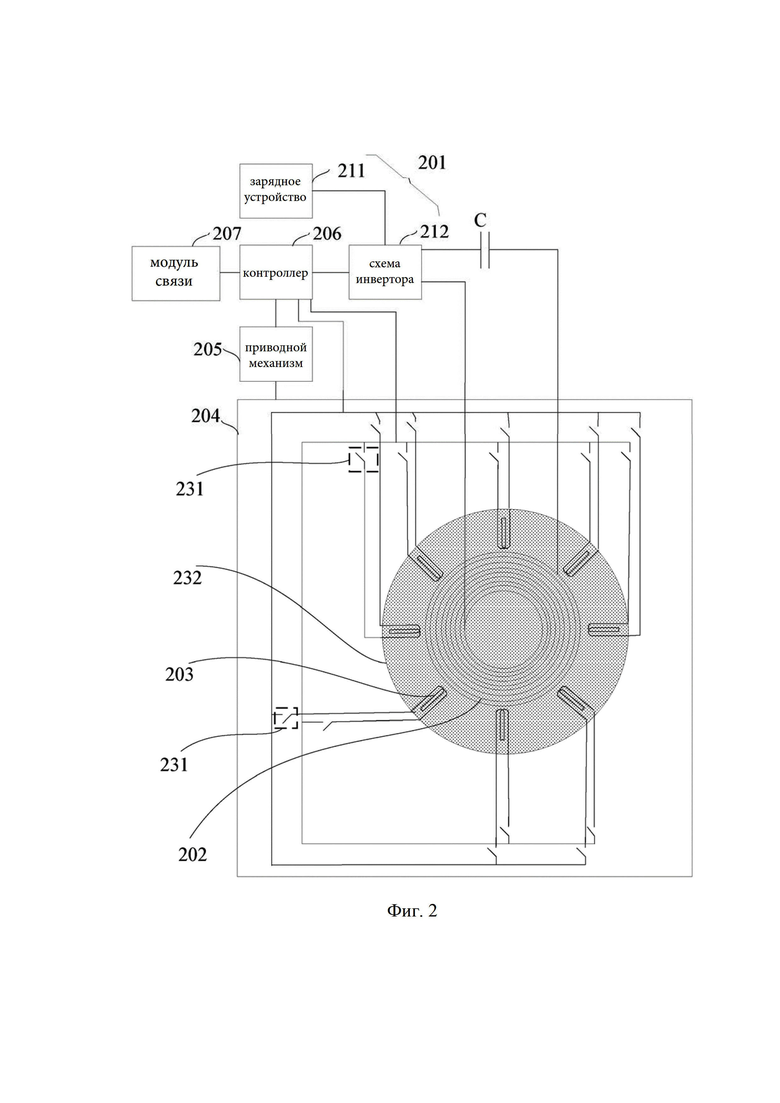
[0057] Фиг. 2 представляет схематический структурный вид беспроводного зарядного устройства в соответствии с вариантом осуществления настоящего изобретения;
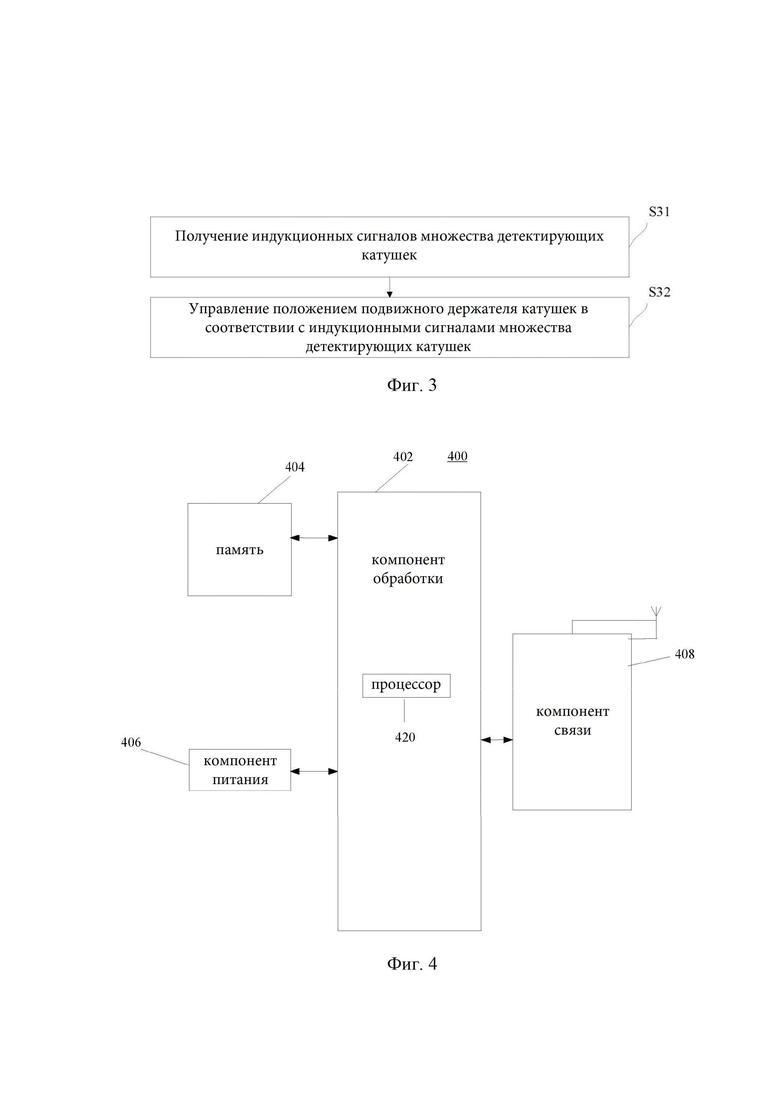
[0058] Фиг. 3 представляет блок-схему способа управления беспроводной зарядкой в соответствии с вариантом осуществления настоящего изобретения;
[0059] Фиг. 4 представляет структурную схему зарядного оборудования в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0060] Примеры осуществления будут подробно описаны и проиллюстрированы на прилагаемых чертежах. Когда описание в дальнейшем ссылается на чертежи, один и тот же номер на разных чертежах обозначает одинаковые или подобные элементы, если только не указано иное. Реализации, как описано в примерах осуществления, не представляют все реализации в соответствии с настоящим изобретением. Напротив, эти реализации являются просто примерами устройств и способов, соответствующих некоторым аспектам настоящего изобретения, как описано в прилагаемой формуле изобретения.
[0061] Фиг. 1 представляет схематический структурный вид беспроводной зарядной системы, показанной в настоящем изобретении. Как видно на фиг. 1, система содержит передающую сторону 101 для преобразования электрического сигнала в электромагнитную волну для излучения и приемную сторону 102 для приема электромагнитной волны и преобразования ее в электрический сигнал для вывода на батарею. Во время зарядки передающая катушка на передающей стороне 101 и приемная катушка на приемной стороне 102 выровнены, и может быть достигнута оптимальная эффективность зарядки, например, около 84%. Однако, когда приемная катушка и передающая катушка смещены, эффективность зарядки сильно падает.
[0062] Фиг. 2 представляет схематический структурный вид беспроводного зарядного устройства в соответствии с вариантом осуществления настоящего изображения. Беспроводное зарядное устройство может быть передающей стороной 101. Как видно на фиг. 2, беспроводное зарядное устройство содержит схему 201 источника питания, передающую катушку 202, множество детектирующих катушек 203, подвижный держатель 204 катушек, приводной механизм 205 и контроллер 206.
[0063] Схема 201 источника питания выполнена с возможностью предоставлять сигнал переменного тока.
[0064] Передающая катушка 202 выполнена с возможностью преобразовывать сигнал переменного тока в электромагнитные волны для излучения на приемную сторону.
[0065] Множество детектирующих катушек 203 расположены так, чтобы быть разнесенными по окружности вокруг передающей катушки 202. Круговая дорожка, образованная множеством детектирующих катушек 203, является концентрической относительно передающей катушки 202. Детектирующие катушки 203 выполнены с возможностью излучать энергию на приемную катушку приемной стороны и генерировать индукционный сигнал.
[0066] Передающая катушка 202, а также множество детектирующих катушек 203 расположены на подвижном держателе 204 катушек.
[0067] Приводной механизм 205 соединен с подвижным держателем 204 катушек и выполнен с возможностью приводить в движение подвижный держатель 204 катушек.
[0068] Контроллер 206 выполнен с возможностью получать индукционные сигналы множества детектирующих катушек 203 и управлять положением подвижного держателя 204 катушек посредством управления приводным механизмом 205 на основе индукционных сигналов множества детектирующих катушек 203.
[0069] В варианте осуществления настоящего изобретения множество детектирующих катушек 203 расположены на расстоянии друг от друга вокруг передающей катушки 202. Каждая из множества детектирующих катушек 203 используется для генерации индукционного сигнала с приемной катушкой. Поскольку величина каждого из индукционных сигналов связана с расстоянием, можно определить, выровнены ли приемная катушка и передающая катушка, в соответствии с множеством индукционных сигналов. Когда приемная катушка и передающая катушка не выровнены, положением подвижного держателя 204 катушек можно управлять с помощью контроллера 206 для выравнивания приемной катушки и передающей катушки, чтобы повысить эффективность зарядки для беспроводной зарядки. Между тем, поскольку детектирующие катушки 203 расположены вокруг передающей катушки 202 вместо того, чтобы располагаться между передающей катушкой 202 и приемной катушкой, вихревой ток не возникает между передающей катушкой 202 и приемной катушкой, а вихревой ток влияет на эффективность зарядки на 5% или более, т.е. отсутствует воздействие на передачу энергии между передающей катушкой 202 и приемной катушкой.
[0070] Следует отметить, что приемная сторона может быть размещена над передающей стороной с помощью основания или опоры, и основание или опора не перемещаются вместе с держателем 204 катушек. Основание или опора могут быть частью беспроводного зарядного устройства.
[0071] В варианте осуществления настоящего изобретения схема 201 источника питания может включать в себя зарядное устройство 211 и инверторную схему 212. Зарядное устройство 211 выполнено с возможностью преобразовывать переменный ток, создаваемого источником питания, в сигнал постоянного тока, и инверторная схема 212 выполнена с возможностью преобразовывать сигнал постоянного тока в сигнал переменного тока.
[0072] В качестве иллюстрации зарядное устройство 211 может представлять собой зарядное устройство с прямым питанием (Direct Power Charger) (DPC), зарядное устройство с быстрой зарядкой 1 (QC1), зарядное устройство QC2, зарядное устройство QC3, зарядное устройство QC4 или зарядное устройство с подачей энергии по технологии Power Delivery (PD) charger. Инверторная схема 212 может быть инверторной схема полного моста/полумоста. Передающая катушка 202 обычно изготавливается из проволоки из N жил, где N равно 8012, или медного провода гибкой печатной платы (FPC).
[0073] В варианте осуществления настоящего изобретения детектирующая катушка 203 представляет собой закругленную прямоугольную катушку с 2-3 витками, и направление длины закругленной прямоугольной катушки проходит через центр передающей катушки 202.
[0074] В этой реализации закругленная прямоугольная катушка с 2-3 витками используется в качестве детектирующей катушки. С одной стороны, она может быть сконструирована так, чтобы быть достаточно малой, так что даже если предусмотрено множество детектирующих катушек, все беспроводное зарядное устройство не будет иметь слишком большой размер. С другой стороны, эта закругленная прямоугольная катушка позволяет излучению энергии между детектирующей катушкой и приемной катушкой генерировать индукционный сигнал.
[0075] Как показано на фиг. 2, детектирующая катушка 203 сконструирована в 2 витка, и 2 витка закругленной прямоугольной катушки расположены со сдвигом и образуют m-образную форму. В этой конструкции может использоваться мягкая проволока в качестве материала катушки, чтобы избежать короткого замыкания на пересечении. В других реализациях закругленная прямоугольная катушка также может иметь конструкцию скрепки для бумаг, что не ограничено в этой заявке.
[0076] Размер детектирующей катушки 203 может быть сконструирован малым, например, длина детектирующей катушки может быть от 1/3 до 1/2 радиуса передающей катушки 202, а ширина детектирующей катушки может составлять от 1/4 до 1/3 длины детектирующей катушки. Размер детектирующей катушки 203 может быть рассчитан в соответствии с фактическими потребностями, и приведенные выше значения являются только примерными.
[0077] Как показано на фиг. 2, множество детектирующих катушек 203 расположено попарно, множество пар детектирующих катушек 203 разнесены равномерно, и каждая пара детектирующих катушек 203 симметрична относительно передающих катушек 202.
[0078] В этой реализации множество детектирующих катушек 203 расположены попарно, и каждая пара детектирующих катушек 203 расположена симметрично относительно передающих катушек 202, так что контроллер 206 может определять положение приемной катушки на основе сигналов каждой пары детектирующих катушек 203. Это связано с тем, что если приемная катушка выровнена с центром передающей катушки, расстояние между парой детектирующих катушек 203 и центром передающей катушки является равным, в это самое время величины индукционных сигналов, генерируемых парой детектирующих катушек, равны. Наоборот, контроллер может определять, смещена ли приемная катушка, и величину смещения в соответствии с величинами индукционных сигналов, генерируемых парой детектирующих катушек.
[0079] Иллюстративно количество детектирующих катушек 203 может быть восемь, как показано на чертеже, и восемь детектирующих катушек 203 разделены на четыре пары. В других реализациях количество детектирующих катушек 203 может также быть четыре, шестнадцать и т.п. Чем больше количество детектирующих катушек 203, тем выше точность определения положения; а чем меньше количество детектирующих катушек, тем проще схема.
[0080] В варианте осуществления настоящего изобретения оба конца детектирующей катушки 203 выполнены как входной конец для сигнала возбуждения и выходной конец для индукционного сигнала, соответственно.
[0081] В этой реализации оба конца детектирующих катушек 203 используются как входной конец для сигнала возбуждения и выходной конец для индукционного сигнала, соответственно. Сигнал возбуждения является входным и генерирует индукционный сигнал с приемной катушкой, на основе которого определяется, выровнены ли передающая катушка и приемная катушка.
[0082] Как показано на фиг. 2, каждая из детектирующих катушек 203 расположена вдоль радиального направления передающей катушки 202, и катушки каждой пары детектирующих катушек 203 расположены напротив. В качестве иллюстрации минимальное расстояние между детектирующей катушкой 203 и передающей катушкой может составлять 2 мм.
[0083] Как показано на фиг. 2, управляемый переключатель 231 предусмотрен между контроллером 206 и каждым из входного конца для сигнала возбуждения и выходного конца для индукционного сигнала каждой из детектирующих катушек 203.
[0084] Контроллер 206 выполнен с возможностью циклически управлять управляемым переключателем 231, подключенным к каждой из детектирующих катушек 203, которые должны включаться и выключаться. В любой момент времени включается только один из управляемых переключателей 231, подключенных к соответствующей одной из детектирующих катушек 203.
[0085] В этой реализации каждая из управляющих катушек 203 циклически управляется управляемыми переключателями 231, чтобы предотвратить одновременное функционирования каждой из катушек и взаимное влияние друг на друга. Между тем, поскольку каждая из детектирующих катушек управляется циклически, приемной катушкой и передающей катушкой можно управлять, чтобы они были выровнены не только в начале зарядки, но также и во время зарядки.
[0086] В варианте осуществления настоящего изобретения каждый из управляемых переключателей 231 может быть реализован с использованием встроенного переключателя или одного или более полевых транзисторов со структурой металл-оксид-полупроводник (МОП-транзистор).
[0087] В реализации варианта осуществления настоящего изобретения подвижный держатель 204 катушек содержит:
[0088] монтажную плату, а передающая катушка 202 и множество детектирующих катушек 203 расположены на этой монтажной плате.
[0089] В этой реализации передающая катушка 202 и детектирующие катушки 203 размещаются на монтажной плате, и затем используется приводной механизм 205 для приведения их в движение. С одной стороны, это облегчает миниатюризацию за счет интеграции катушек на монтажной плате. С другой стороны, катушками легко управлять для перемещения, конструируя их на монтажной плате.
[0090] Множество детектирующих катушек 203 и передающая катушка 202 находятся в одной плоскости, так что детектирующие катушки не только могут хорошо детектировать, но также могут поддерживать или по существу поддерживать эффективность во время беспроводной зарядки большой мощности, т.е. влияние беспроводной зарядки большой мощности на эффективность очень мало и может быть проигнорировано.
[0091] В качестве иллюстрации монтажная плата может быть печатной платой, и вышеупомянутая передающая катушка 202, множество детектирующих катушек 203, управляемые переключатели 231 и разводка межсоединений могут быть расположены на монтажной плате.
[0092] Как показано на фиг. 2, поскольку управляемый переключатель расположен между каждой из детектирующих катушек 203 и контроллером, контроллер может соединять все детектирующие катушки по двум трассам, тем самым уменьшая сложность конструкции схемы.
[0093] Как показано на фиг. 2, монтажная плата дополнительно снабжена круглым магнитным экранирующим материалом 232. Магнитным экранирующим материалом 232 является материал, имеющий высокую магнитную проницаемость, и он может представлять собой, например, ферритовый материал. Магнитный экранирующий материал 232 может иметь круглую форму, а передающая и детектирующие катушки расположены на магнитном экранирующем материале 232, чтобы получить путь с высокой магнитной проницаемостью для беспроводной зарядки, что значительно повышает эффективность и уменьшает тепловыделение.
[0094] В качестве иллюстрации приводной механизм 205 может содержать двигатель, схему управления двигателем и компонент линейного движения. Контроллер посылает сигнал в схему управления двигателем, так что схема управления двигателем может управлять вращением двигателя вперед или назад и количеством движения в соответствии с сигналом контроллера. Компонент линейного движения может приводиться в движение для линейного движения за счет вращения двигателя, и компонент линейного движения приводит в движение монтажную плату. Чтобы гарантировать перемещение монтажной платы в любом направлении, вышеупомянутые приводные механизмы 205 размещены в двух группах. Направления движения монтажной платы, приводимой в движение двумя группами приводных механизмов 205, перпендикулярны друг другу, и любая из двух групп приводных механизмов 205 может скользить в направлении движения другой группы (например, по направляющим), так что монтажная плата может скользить в любом направлении и на любое расстояние. При осуществлении управления контроллер необходимо разложить только на два вертикальных направления на основе установленных направления и расстояния перемещения, а затем управлять направлением вращения и количеством оборотов двух двигателей, соответственно.
[0095] Например, двигатель может быть шаговым двигателем для облегчения управлением движения. Компонентом линейного движения может быть ползун кривошипа и т.д. Ползун кривошипа преобразует вращение выходного вала двигателя в линейное движение ползуна, а монтажная плата расположена на ползуне.
[0096] В варианте осуществления настоящего изобретения контроллер 206 вводит сигнал возбуждения в детектирующую катушку через входной конец для сигнала возбуждения детектирующей катушки. Детектирующая катушка генерирует энергию излучения и генерирует сигнал индукции через определенный промежуток времени. Сигнал индукции выводится на контроллер через выходной конец для индукционного сигнала. Контроллер может быть реализован с использованием процессора или другого чипа с функциями управления.
[0097] Контроллер 206 выполнен с возможностью сравнивать разность амплитуды (напряжения) индукционных сигналов, детектируемых каждой парой детектирующих катушек 203. Когда разность амплитуд между двумя индукционными сигналами, детектируемыми по меньшей мере одной парой детектирующих катушек 203, превышает пороговое значение, перемещение положения подвижного держателя 204 катушек на основе разности амплитуд между двумя измеряемыми сигналами, детектируемыми каждой парой детектирующих катушек 203.
[0098] В этой реализации амплитуда индукционного сигнала каждой пары детектирующих катушек 203 представляет расстояние между приемной катушкой и двумя детектирующими катушками 203. Если разность между двумя амплитудами индукционных сигналов каждой пары детектирующих катушек 203 превышает пороговое значение, это указывает, что приемная катушка и передающая катушка 202 не выровнены в направлении пары детектирующих катушек 203, так что положение подвижного держателя 204 катушек необходимо перемещать, чтобы выровнять приемную катушку и передающую катушку.
[0099] При этом разность амплитуд может быть определена на основе расстояния.
Например, приемная катушка и передающая катушка смещены в определенном направлении в пределах диапазона 2 мм, и может быть достигнута быстрая зарядка. В этом случае разность амплитуд, соответствующая смещению в 2 мм, может быть использована в качестве порогового значения. Естественно, пороговое значение при этом также может быть спроектировано так, чтобы быть больше или меньше, и применение не ограничивается этим.
[00100] В реализации варианта осуществления настоящего изобретения контроллер 206 выполнен с возможностью определять, на основе разности амплитуд индукционных сигналов одной пары детектирующих катушек 203, направление и расстояние подвижного держателя 204 катушек, движущегося в направлении, в котором расположена одна пара детектирующих катушек 203; и выполнен с возможностью определять, на основе направления и расстояния подвижного держателя 204 катушек, движущегося в направлении, в котором расположены все пары детектирующих катушек 203, направление и расстояние перемещения подвижного держателя 204 катушек.
[00101] В этой реализации смещение в направлении пары детектирующих катушек 203 определяется в соответствии с разностью амплитуд индукционных сигналов каждой пары детектирующих катушек 203, тем самым определяется расстояние, необходимое для перемещения. Затем расстояния, необходимые для перемещения в каждом направлении, объединяются для получения направления и расстояния подвижного держателя 204 катушек, необходимое для перемещения в конечном счете. Перемещение в этом направлении и на это расстояние может устранить смещение в каждом направлении и максимизировать эффективность зарядки.
[00102] В варианте осуществления настоящего изобретения соотношение между разностью амплитуд и расстоянием, необходимым для перемещения, может быть определено экспериментально заранее, и в применении соотношение может быть использовано для определения расстояния, необходимого для перемещения. Например, диапазон разности амплитуд для каждого шага соответствует расстоянию перемещения. Таким образом, когда получают разность амплитуд, соответствующее расстояние, необходимое для перемещения, может быть получено путем проверки таблицы сравнения между разностью амплитуд и расстоянием, необходимым для перемещения.
[00103] В качестве иллюстрации при определении направления и расстояния перемещения каждой пары детектирующих катушек 203 в направлении расположения, расстояние перемещения в каждом направлении может использоваться как вектор, а сумма векторов может быть вычислена для получения окончательного направления и расстояния перемещения подвижного держателя 204 катушки.
[00104] В реализации варианта осуществления настоящего изобретения контроллер 206 дополнительно выполнен с возможностью сравнивать разности между амплитудой индукционного сигнала каждой детектирующей катушки 203 и опорным значением. Если какая-либо разность между амплитудой и опорным значением превышает пороговое значение, определяется, что имеется приемная катушка. Если каждая разница между амплитудой и опорным значением превышает пороговое значение, определяется, что приемная катушка отсутствует.
[00105] В этой реализации по амплитуде индукционного сигнала каждой детектирующей катушки 203 можно определить, снабжена ли текущая передающая катушка соответственно приемной катушкой. Только когда определяется, что имеется приемная катушка, то определяется, нужно ли перемещать передающую катушку, чтобы избежать перемещения без приемной катушкой, что может привести к потере энергии.
[00106] В варианте осуществления настоящего изобретения опорное значение относится к амплитуде индукционного сигнала детектирующей катушки 203, когда отсутствует приемная катушка.
[00107] В реализации варианта осуществления настоящего изобретения устройство может дополнительно содержать:
[00108] модуль 207 связи, выполненный с возможностью выполнять беспроводную связь с приемной стороной для аутентификации приемной стороны, и
[00109] контроллер 206, выполненный с возможностью управлять положением подвижного держателя 204 катушек на основе индукционных сигналов множества детектирующих катушек 203, когда приемная сторона аутентифицирована.
[00110] В этой реализации приемная сторона аутентифицируется модулем 207 связи, и после того, как аутентификация пройдена, положением подвижного держателя 204 катушек управляют, чтобы предотвратить перемещение подвижного держателя 204 катушек, когда приемная сторона является недействительной приемной стороной, которая впоследствии не заряжается, и предотвратить потери энергии, которые происходят при этом.
[00111] В качестве иллюстрации модуль 207 связи может содержать схему модуляции и демодуляции и блок связи по протоколу.
[00112] Вышеупомянутый процесс аутентификации может быть выполнен блоком связи по протоколу. Работа по аутентификации может быть осуществлена блоком связи по протоколу, и способ верификации может быть реализован с использованием общего алгоритма аутентификации. Блок связи по протоколу может быть блоком Bluetooth или блоком связи ближнего радиуса действия (NFC), и блок связи по протоколу использует протокол Bluetooth или NFC в качестве несущей для передачи по ней информации проприетарного протокола. Частный протокол предварительно организуется приемной стороной и передающей стороной, и передаваемая информация может дополнительно содержать команду по подъему мощности, индикационную информацию о текущей мощности, вышеупомянутую информацию о зарядном устройстве и т.п.в стандарте беспроводной зарядки (спецификация Qi).
[00113] В других реализациях блок связи по протоколу может также использовать другие блоки связи по протоколу, например, блок беспроводной связи с высокой точностью воспроизведения (WI-FI). В качестве альтернативы беспроводное зарядное устройство может быть снабжено только схемой модуляции и демодуляции и не иметь блока связи по протоколу.
[00114] Схема модуляции и демодуляции относится к внутриполосной связи и отвечает за выполнение стандартного взаимодействия на основе протокола с передающей стороной, а также определяет, существует ли в процессе блок связи по протоколу на противоположной стороне; если существует, то последующий процесс связи может быть осуществлен с использованием блока связи по протоколу, т.е. внеполосной связи. На качество сигнала внутриполосной связи влияют колебания нагрузки и связывание катушки, так что это ведет к нарушению сигнала демодуляции, что в результате приводит к прерыванию зарядки. На качество сигнала не влияет связывание нагрузки и катушки при использовании внеполосной связи, и качество связи значительно улучшается.
[00115] В качестве иллюстрации схема модуляции и демодуляции может быть подключена между зарядным устройством 211 и модулем 201 инвертора. Схема модуляции и демодуляции используется для демодуляции сигнала с амплитудной манипуляцией (ASK) и для генерации сигнала с частотной манипуляцией (FSK) путем управления током и напряжением катушки, тем самым выполняя информационное взаимодействие с приемной стороной. При этом содержимое информационного взаимодействия реализуется на основе спецификации Qi, и схема модуляции и демодуляции взаимодействует с приемной стороной, чтобы определить, что оно основано на зарядке со стандартным профилем мощности (ВРР) или зарядке с расширенным профилем мощности (ЕРР). В качестве иллюстрации, если используется зарядка ВРР, напряжение на выходе Vout передающей катушки составляет 5 В, а если используется зарядка ЕРР, напряжение на выходе Vout передающей катушки составляет 12 В.
[00116] Далее приведен пример беспроводного зарядного устройства с восемью детектирующими катушками, каждая из которых является N1, N2 …, N8, соответственно, и которые разделены на четыре набора диагональных катушек. Если амплитуды индукционных сигналов, полученных четырьмя наборами диагональных катушек, равны, они являются выровненными.
[00117] 1) Когда беспроводное зарядное устройство начинает работать, беспроводное зарядное устройство начинает выявлять, имеется ли приемная сторона. Контроллер посылает импульс сигнала возбуждения через входной конец для сигнала возбуждения каждый период Т, например, 250 мс. Сигнал возбуждения имеет частоту 1 МГц и длительность t, t<Т, а амплитуда сигнала возбуждения может быть связана с величинами индуктивности катушек для катушек N1…N8. Он управляет включением катушки N1 и посылает первый импульс, а затем проверяет амплитуду VI индукционного сигнала во времени t. Он управляет включением катушки N2 и посылает второй импульс, а затем проверяет амплитуду V2 индукционного сигнала во времени t. В общей сложности проверяются амплитуды индукционных сигналов 8 катушек.
[00118] Если все разности между амплитудами V1, V2…V8 и опорным значением находятся в пределах диапазона порогового значения, считается, что ни одна приемная сторона не размещена на передающей стороне. Если одна или более разностей между амплитудой (-ами) одного или более V1, V2…V8 и опорным значением превышает/превышают пороговое значение, считается, что имеется приемная сторона.
[00119] 2) Когда имеется приемная сторона, котроллер отправляет цифровой звуковой импульс через модуль связи для аутентификации приемной стороны. В соответствии со спецификацией QI, если приемная сторона отвечает сигналом 0×01 ASK в течение соответствующего времени, она является действительным устройством, а если нет, то это недействительное устройство.
[00120] 3) Если это действительное устройство, контроллер определяет, необходимо ли перемещать передающую катушку в соответствии с величиной V1, V2…V8 и вычисляет направление и расстояние перемещения, когда ей необходимо перемещаться.
[00121] 4) Преобразование направления и расстояния перемещения в управляющий сигнал для обратной связи со схемой управления двигателем для управления движением шагового двигателя.
[00122] Во время процесса зарядки детектирующая катушка работает постоянно, и в целом передающая катушка и приемная катушка выравниваются посредством множества определений положения. Следовательно, в этом решении передающая катушка и приемная катушка могут быть выровнены не только на той стадии, когда приемная сторона только что размещена. Способ также может детектировать и перемещать катушку в реальном времени для достижения выравнивания в процессе беспроводной зарядки высокой мощности, даже если приемная сторона случайным образом скользит или перемещается.
[00123] Фиг. 3 представляет блок-схему способа управления беспроводной зарядкой в соответствии с вариантом осуществления настоящего изобретения. Способ применим к беспроводному зарядному устройству, показанному на фиг. 2. Как показано на фиг. 3, способ включает в себя следующие этапы.
[00124] На этапе S31 получают индукционные сигналы множества детектирующих катушек.
[00125] На этапе S32 управляют положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек.
[00126] В реализации варианта осуществления настоящего изобретения множество детектирующих катушек располагают попарно, множество пар детектирующих катушек располагают так, чтобы они были распределены равномерно, и каждая из детектирующих катушек симметрична относительно передающей катушки; и при этом управление положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек включает в себя:
[00127] сравнение разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек; когда разность амплитуд между двумя индукционными сигналами, детектируемыми по меньшей мере одной парой детектирующих катушек, превышает пороговое значение, перемещение положения подвижного держателя катушек на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек.
[00128] В реализации варианта осуществления настоящего изобретения перемещение положения подвижного держателя катушек на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек, включает в себя:
[00129] определение направления и расстояния для подвижного держателя катушек, движущегося в направлении, в котором расположена одна пара детектирующих катушек, на основе разности амплитуд между индукционными сигналами одной пары детектирующих катушек; и определение направления и расстояния перемещения подвижного держателя катушек на основе направления и расстояния для подвижного держателя катушек, движущегося в направлении, в котором расположены все пары детектирующих катушек.
[00130] В варианте осуществления настоящего изобретения соотношение между разностью амплитуд и расстоянием, необходимым для перемещения, может быть определено экспериментально заранее, и в применении соотношение может использоваться для определения расстояния, необходимого для перемещения. Например, диапазон разности амплитуд для каждого этапа соответствует расстоянию перемещения. Таким образом, когда получают разность амплитуд, соответствующее расстояние, необходимое для перемещения, может быть получено путем проверки таблицы сравнения между разностью амплитуд и расстоянием, необходимым для перемещения.
[00131] В качестве иллюстрации при определении направления и расстояния перемещения каждой пары детектирующих катушек в направлении расположения, расстояние перемещения в каждом направлении может быть использовано как вектор, и сумма векторов может быть вычислена для получения конечного направления и расстояния перемещения подвижного держателя катушек.
[00132] В реализации варианта осуществления настоящего изобретения способ может дополнительно включать в себя:
[00133] сравнение разности между амплитудой индукционного сигнала каждой детектирующей катушки и опорным значением, и, если какая-либо разность между амплитудой и опорным значением превышает пороговое значение, определяют, что имеется приемная катушка.
[00134] В реализации варианта осуществления настоящего изобретения способ может дополнительно включать в себя:
[00135] выполнение беспроводной связи с приемной стороной для аутентификации приемной стороны;
[00136] управление положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек, когда приемная сторона аутентифицирована.
[00137] Фиг. 4 представляет структурную схему зарядного оборудования 400 в соответствии с примером осуществления. Как видно из фиг. 4, зарядное оборудование 400 может содержать один или более из следующих компонентов: компонент 402 обработки, память 404, компонент 406 питания и компонент 408 связи.
[00138] Компонент 402 обработки, как правило, управляет всеми операциями зарядного оборудования 400, например операциями, связанными с отображением, телефонными звонками, передачей данных, операциями с камерой и операциями записи. Компонент 402 обработки может содержать один или более процессоров 420 для исполнения команд с целью выполнения всех или части этапов вышеуказанных способов. Кроме того, компонент 402 обработки может содержать один или более модулей, которые облегчают взаимодействие между компонентом 402 обработки и другими компонентами. Например, компонент 402 обработки может содержать мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом и компонентом 402 обработки.
[00139] Память 404 выполнена с возможностью запоминать различные виды данных для поддержки работы зарядного оборудования 400. Примеры таких данных включают в себя команды для любой программы программного обеспечения или способа, реализуемых на зарядном оборудовании 400, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Память 404 может быть реализована с использованием любого вида энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как статическое оперативное запоминающее устройство (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитная память, флэш-память, магнитный или оптический диск [00140] Компонент 406 питания обеспечивает питанием различные компоненты зарядного оборудования 400. Компонент 406 питания может включать в себя систему управления питанием, один или более источников питания и любые другие компоненты, связанные с производством, управлением и распределением энергии для зарядного оборудования 400.
[00141] Компонент 408 связи выполнен с возможностью содействовать связи, проводной или беспроводной, между зарядным оборудованием 400 и другим оборудованием. В варианте осуществления настоящего изобретения компонент 408 связи может получать доступ к беспроводной сети на основе стандарта связи, такого как 2G, 3G, 4G или 5G или их комбинации, чтобы реализовать физическое обнаружение сигналов управления нисходящей линии связи. В одном примере осуществления компонент 408 связи принимает широковещательный сигнал или связанную с широковещанием информацию из внешней системы управления широковещанием через широковещательный канал. В качестве варианта компонент 408 связи также включает в себя модуль NFC (коммуникации ближнего поля).
[00142] В примерах осуществления зарядное оборудование 400 может быть реализовано с помощью одной или более специализированных интегральных схем (ASIC), цифровых сигнальных процессоров (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых вентильных матриц (FPGA), контроллера, микроконтроллера, микропроцессора или другого электронного компонента для выполнения вышеописанного способа управления беспроводной зарядкой.
[00143] В примерах осуществления также предлагается машиночитаемый носитель данных, содержащий команду, например память 404, содержащая команду. Эта команда исполняется процессором 420 зарядного оборудования 400 для выполнения описанный выше способ управления беспроводной зарядкой. Например, машиночитаемым носителем может быть ПЗУ (ROM), ОЗУ (RAM), компакт-диск (CD-ROM), магнитная лента, гибкий диск, оптическое устройство для хранения информации.
[00144] Другие варианты осуществления изобретения будут очевидны специалистам в данной области техники из рассмотрения описания и практики использования изобретения, раскрытого в настоящем документе. Это изобретение предназначено для охвата любых изменений, использований или адаптаций изобретения в соответствии с общими принципами настоящего изобретения, включая такие отступления от настоящего описания, которых входят в известную или обычную практику в данной области техники. Предполагается, что описание и примеры будут рассматриваться только как иллюстративные, с истинными объемом и сущностью изобретения, указанными в следующей формуле изобретения.
[00145] Следует понимать, что настоящее изобретение не ограничено точной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и различные модификации и изменения могут быть сделаны без отклонения от объема настоящего изобретения. Объем изобретения ограничен только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАРЯДНАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2632565C2 |
| Беспроводное зарядное устройство с функцией ультразвукового подавления звукозаписывающего тракта заряжаемого мобильного устройства | 2021 |
|
RU2772899C1 |
| БЕСПРОВОДНАЯ ЗАРЯДНАЯ СИСТЕМА ДЛЯ МАЛОМОЩНЫХ ПОТРЕБИТЕЛЕЙ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2510558C1 |
| СИСТЕМА, ГЕНЕРИРУЮЩАЯ АЭРОЗОЛЬ, И СПОСОБ ЕЕ РАБОТЫ | 2020 |
|
RU2770182C1 |
| ИНДУКТИВНОЕ ЗАРЯДНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОННОЙ СИГАРЕТЫ | 2014 |
|
RU2630431C2 |
| ЭКРАНИРОВАННАЯ СИСТЕМА БЕСПРОВОДНОЙ МНОГОПОЗИЦИОННОЙ ЗАРЯДКИ МОБИЛЬНЫХ УСТРОЙСТВ | 2013 |
|
RU2524920C1 |
| СИСТЕМА БЕСПРОВОДНОЙ ЗАРЯДКИ МОБИЛЬНЫХ УСТРОЙСТВ | 2013 |
|
RU2534020C1 |
| ЗАРЯДНОЕ УСТРОЙСТВО И УСТРОЙСТВО БЕСКОНТАКТНОЙ ПОДАЧИ ПИТАНИЯ | 2014 |
|
RU2666773C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УСТРОЙСТВА В СИСТЕМЕ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2010 |
|
RU2530539C2 |
| Беспроводная зарядная система | 2021 |
|
RU2781948C1 |
Настоящее изобретение относится к области электротехники, в частности к беспроводному зарядному устройству. Технический результат заключается в повышении эффективности беспроводной зарядки. Устройство содержит: схему источника питания, выполненную с возможностью подавать сигнал переменного тока; передающую катушку, выполненную с возможностью преобразовывать сигнал переменного тока в электромагнитные волны для излучения на приемную сторону; беспроводное зарядное устройство дополнительно содержит: множество детектирующих катушек, расположенных с возможностью разнесения по окружности вокруг передающей катушки, множество детектирующих катушек образует круговую дорожку, которая является концентрической относительно передающей катушки, и детектирующая катушка выполнена с возможностью излучать энергию на приемную катушку приемной стороны и генерировать индукционный сигнал; подвижный держатель катушек, передающая катушка и множество детектирующих катушек расположены на подвижном держателе катушек; приводной механизм, соединенный с подвижным держателем катушек и выполненный с возможностью приводить подвижный держатель катушек в движение; контроллер, выполненный с возможностью получать индукционные сигналы множества детектирующих катушек и управлять положением подвижного держателя катушек посредством управления приводным механизмом на основе индукционных сигналов множества детектирующих катушек. 4 н. и 13 з.п. ф-лы, 4 ил.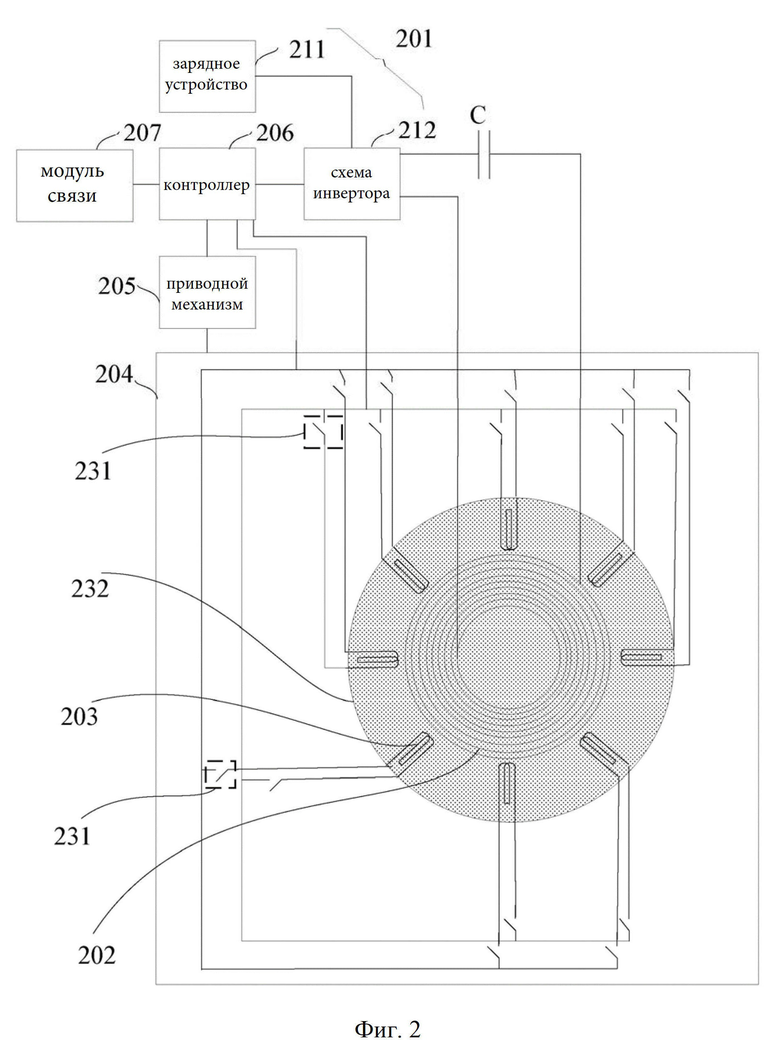
1. Беспроводное зарядное устройство, содержащее:
схему (201) источника питания, выполненную с возможностью подавать сигнал переменного тока;
передающую катушку (202), выполненную с возможностью преобразовывать сигнал переменного тока в электромагнитные волны для излучения на приемную сторону;
отличающееся тем, что беспроводное зарядное устройство дополнительно содержит:
множество детектирующих катушек (203), расположенных по окружности вокруг передающей катушки (202), при этом множество детектирующих катушек (203) образует круговую дорожку, которая является концентрической относительно передающей катушки (202), и каждая из детектирующих катушек (203) выполнена с возможностью излучать энергию на приемную катушку приемной стороны и генерировать индукционный сигнал;
подвижный держатель (204) катушек, на котором расположены как передающая катушка (202), так и множество детектирующих катушек (203);
приводной механизм (205), соединенный с подвижным держателем (204) катушек и выполненный с возможностью приводить в движение подвижный держатель (204) катушек; и
контроллер (206), выполненный с возможностью получать индукционные сигналы множества детектирующих катушек (203) и управлять положением подвижного держателя (204) катушек посредством управления приводным механизмом (205) на основе индукционных сигналов множества детектирующих катушек (203).
2. Беспроводное зарядное устройство по п. 1, отличающееся тем, что каждая детектирующая катушка (203) представляет собой закругленную прямоугольную катушку с 2-3 витками, при этом закругленная прямоугольная катушка имеет направление длины, которое проходит через центр передающей катушки (202).
3. Беспроводное зарядное устройство по п. 1, отличающееся тем, что множество детектирующих катушек (203) расположены попарно, множество пар детектирующих катушек (203) расположены так, что они равномерно распределены, и каждая пара детектирующих катушек (203) симметрична относительно передающей катушки (202).
4. Беспроводное зарядное устройство по п. 3, отличающееся тем, что контроллер (206) выполнен с возможностью сравнивать разность амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек (203); когда разность амплитуд между двумя индукционными сигналами, детектируемыми по меньшей мере одной парой детектирующих катушек (203), превышает пороговое значение, положение подвижного держателя (204) катушек изменяется на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек (203).
5. Беспроводное зарядное устройство по п. 4, отличающееся тем, что контроллер (206) выполнен с возможностью определять, на основе разности амплитуд между индукционными сигналами одной пары детектирующих катушек (203), направление и расстояние для подвижного держателя (204) катушек, перемещающегося в направлении, в котором расположена одна пара детектирующих катушек (203); и выполнен с возможностью определять, на основе направления и расстояния для подвижного держателя (204) катушек, перемещающегося в направлениях, в которых расположены все пары детектирующих катушек (203), направления и расстояния перемещения подвижного держателя (204) катушек.
6. Беспроводное зарядное устройство по п. 5, отличающееся тем, что контроллер (206) дополнительно выполнен с возможностью сравнивать разность между амплитудой индукционного сигнала каждой детектирующей катушки (203) и опорным значением и определять, имеется ли приемная катушка, если любая из разностей между амплитудой и опорным значением превышает пороговое значение.
7. Беспроводное зарядное устройство по п. 5, отличающееся тем, что оба конца каждой детектирующей катушки (203) соответственно выполнены в виде входного конца для сигнала возбуждения и выходного конца для индукционного сигнала.
8. Беспроводное зарядное устройство по п. 7, отличающееся тем, что управляемый переключатель (231) установлен между контроллером (206) и каждым из входного конца для возбуждающего сигнала и выходного конца для индукционного сигнала каждой из детектирующих катушек (203), а также контроллер (206) выполнен с возможностью циклически управлять включением и выключением управляемых переключателей (231), которые подключены к каждой из детектирующих катушек (203), и только один управляемый переключатель (231), подключенный к одной из детектирующих катушек (203), включен в любой момент времени.
9. Беспроводное зарядное устройство по любому из пп. 1-8, отличающееся тем, что подвижный держатель (204) катушек содержит:
монтажную плату, на которой расположены передающая катушка (202) и множество детектирующих катушек (203).
10. Беспроводное зарядное устройство по любому из пп. 1-8, отличающееся тем, что устройство дополнительно содержит:
модуль (207) связи, выполненный с возможностью выполнять беспроводную связь с приемной стороной для аутентификации приемной стороны;
при этом контроллер (206) выполнен с возможностью, когда приемная сторона аутентифицирована, управлять положением подвижного держателя (204) катушек на основе индукционных сигналов множества детектирующих катушек (203).
11. Беспроводная зарядная система, отличающаяся тем, что беспроводная зарядная система содержит передающую сторону и приемную сторону;
при этом передающая сторона представляет собой беспроводное зарядное устройство по любому из пп. 1-10.
12. Способ управления беспроводной зарядкой, отличающийся тем, что способ применяют к беспроводному зарядному устройству по п. 1, и способ управления беспроводной зарядкой включает в себя:
получение индукционных сигналов множества детектирующих катушек; управление положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек.
13. Способ по п. 12, отличающийся тем, что множество детектирующих катушек расположены попарно, множество пар детектирующих катушек расположены так, что они равномерно распределены, и каждая пара детектирующих катушек симметрична относительно передающей катушки; этап управления положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек включает в себя:
сравнение разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек; и когда разность амплитуд между двумя индукционными сигналами, детектируемыми по меньшей мере одной парой детектирующих катушек, превышает пороговое значение, перемещение положения подвижного держателя катушек на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек.
14. Способ по п. 13, отличающийся тем, что этап перемещения положения подвижного держателя катушек на основе разности амплитуд между двумя индукционными сигналами, детектируемыми каждой парой детектирующих катушек, включает в себя:
определение, на основе разности амплитуд между индукционными сигналами одной пары детектирующих катушек, направления и расстояния для подвижного держателя катушек, перемещающегося в направлении, в котором расположена одна пара детектирующих катушек; и определение, на основе направления и расстояния для подвижного держателя катушек, перемещающегося в направлении, в котором расположены все пары детектирующих катушек, направления и расстояния перемещения подвижного держателя катушек.
15. Способ по п. 13, отличающийся тем, что способ дополнительно включает в себя: сравнение разности между амплитудой индукционного сигнала каждой
детектирующей катушки и опорным значением, и, если какая-либо разность между амплитудой и опорным значением превышает пороговое значение, определяют, что имеется приемная катушка.
16. Способ по любому из пп. 12-15, отличающийся тем, что способ дополнительно включает в себя:
выполнение беспроводной связи с приемной стороной для аутентификации приемной стороны;
управление положением подвижного держателя катушек на основе индукционных сигналов множества детектирующих катушек, когда приемная сторона аутентифицирована.
17. Зарядное оборудование, отличающееся тем, что зарядное оборудование содержит: процессор;
память для хранения исполняемых команд процессора;
причем процессор выполнен с возможностью выполнять способ управления беспроводной зарядки по любому из пп. 12-16.
| БЕСПРОВОДНАЯ ИНДУКТИВНАЯ ПЕРЕДАЧА ЭНЕРГИИ | 2014 |
|
RU2656246C2 |
| US 20140159651 A1, 12.06.2014 | |||
| БЕСКОНТАКТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 2010 |
|
RU2440635C1 |
| US 2011163714 A1, 07.07.2011. | |||

