Область техники, к которой относится изобретение
Настоящее изобретение относится к зарядному устройству и к устройству бесконтактной подачи питания.
Настоящее изобретение испрашивает приоритет патентной заявки № 2013-133438, поданной в Патентное Ведомство Японии 26 июня 2013 года. Для тех назначенных стран, которые разрешают включение по ссылке, содержание, описанное и/или проиллюстрированное в вышеуказанной заявке, включено в настоящую заявку по ссылке в качестве части описания и/или чертежей настоящей заявки.
Уровень техники
Станция подачи питания, включающая в себя первую катушку, источник питания, устройство управления источником питания и командный блок подачи питания, установлена на стороне земли. Вторая катушка, схема управления зарядом и батарея смонтированы на стороне транспортного средства. Когда необходимо зарядить батарею, водитель подводит и останавливает транспортное средство, так чтобы вторая катушка оказалась точно над первой катушкой. Устройство управления источником питания выдает сигнал управления на подающий источник питания в соответствии с функционированием командного блока подачи питания, и подающий блок питания подает переменный ток возбуждения на первую катушку, в результате чего создается индуцированный магнитный поток. В соответствии с этим индуцированным магнитным потоком во второй катушке наводится индуцированная электродвижущая сила переменного тока, схема управления зарядом преобразует индуцированную электродвижущую силу переменного тока в постоянный ток, и этот постоянный ток подается в батарею. Устройство бесконтактной подачи питания для батареи, сформированное вышеуказанным образом, раскрыто в патентном документе 1.
[Документ, относящийся к известному уровню техники]
[Патентный документ]
[Патентный документ 1] JP 1996-237890 А.
Сущность изобретения
Задачи, решаемые изобретением
Однако, когда транспортное средство трогается с места во время заряда батареи вышеописанным устройством бесконтактной подачи питания, эффективность передачи питания падает из-за отклонения положения первой катушки относительной второй катушки. Пункт подачи питания поддерживает выходной сигнал в состоянии пониженной эффективности передачи питания из-за увеличения напряжения, подаваемого на катушку. Таким образом, имеет место проблема высокой нагрузки схемы блока передачи питания.
Задачей настоящего изобретения является обеспечение зарядного устройства или устройства бесконтактной подачи питания, способного предотвратить приложение высокой нагрузки к схеме блока передачи питания при трогании транспортного средства во время подачи питания от передающей катушки питания на приемную катушку питания.
Средство решения задачи
Настоящее изобретение решает вышеуказанную задачу посредством выполнения управления для уменьшения величины подачи питания от передающей катушки питания на приемную катушку питания, когда контроллер определяет, что транспортное средство должно тронуться с места во время подачи питания от передающей катушки питания на приемную катушку питания бесконтактным образом.
Положительный эффект изобретения
Согласно настоящему изобретению в момент, когда эффективность передачи питания между передающей катушкой питания и приемной катушкой питания уменьшается из-за трогания транспортного средства, устройство подачи питания управляет схемой блока передачи питания на основе уменьшенной величины подачи питания. Таким образом, можно предотвратить подачу высокого напряжения или высокой нагрузки на схему блока передачи питания.
Краткое описание чертежей
Фиг.1 - блок-схема системы бесконтактной подачи питания согласно варианту осуществления настоящего изобретения;
Фиг.2 - блок-схема контроллера на стороне транспортного средства и контроллера на стороне устройства подачи питания по фиг.1;
Фиг.3 - схема, иллюстрирующая последовательность управления, осуществляемого контроллером на стороне транспортного средства, и контроллером на стороне устройства подачи питания по фиг.1;
Фиг.4 - схема, иллюстрирующая последовательность управления, осуществляемого контроллером на стороне транспортного средства, и контроллером на стороне устройства подачи питания по фиг.1.
Подробное описание изобретения
Далее со ссылками на указанные чертежи описывается вариант осуществления настоящего изобретения.
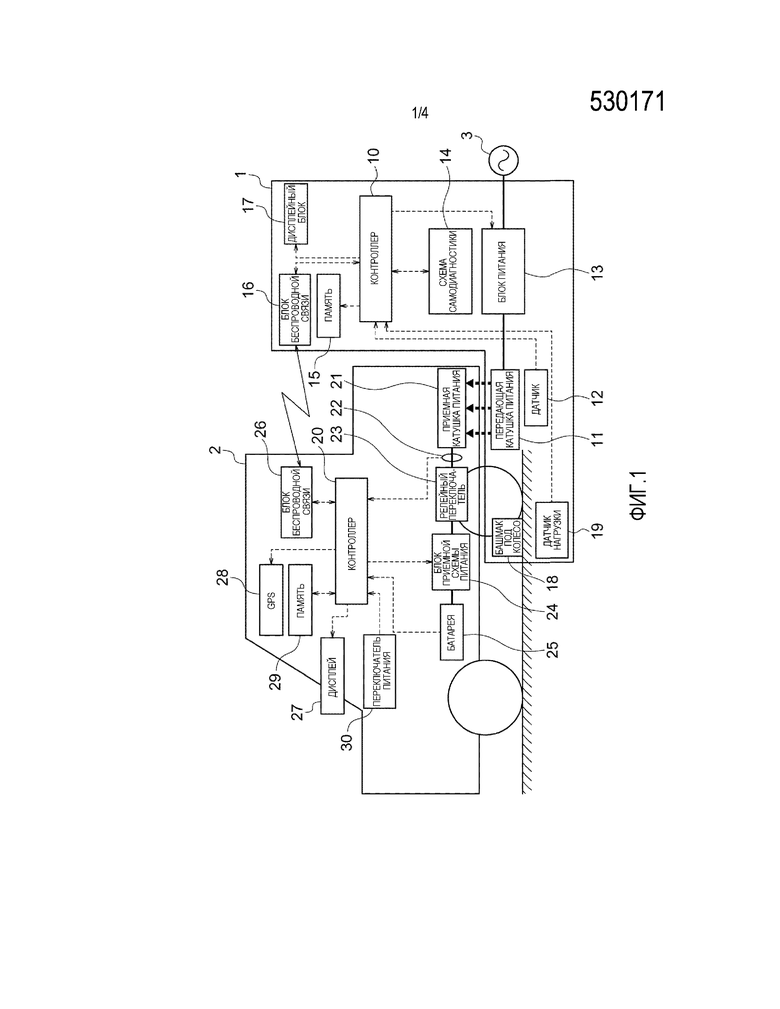
На фиг.1 представлена блок-схема системы бесконтактной подачи питания согласно варианту осуществления настоящего изобретения. Система бесконтактной подачи питания согласно данному варианту осуществления подает питание от передающей катушки питания на приемную катушку питания бесконтактным образом через по меньшей мере магнитную связь, которое расположено на стороне земли, а приемная катушка питания установлена на стороне транспортного средства. Таким образом, эта система заряжает батарею транспортного средства, используя питание, получаемое приемной катушкой питания.
Система бесконтактной подачи питания расположена, например, на парковке около дома или на общественной автостоянке, такой как автостоянка на автомобильной магистрали или т.п. Система бесконтактной подачи питания включает в себя транспортное средство 2 и устройство 1 подачи питания. Устройство 1 подачи питания расположено на площадке для парковки, где паркуется транспортное средство 2. Устройство подачи питания представляет собой блок, установленный на стороне земли, который подает питание, используя бесконтактную подачу питания между катушками при условии, что транспортное средство 2, запарковано в заданном положении. Транспортное средство 2 представляет собой электромобиль, гибридное транспортное средство с подзарядкой от сети или т.п. и включает в себя батарею. Эта батарея может заряжаться внешним источником питания. Транспортное средство 2 включает в себя зарядное устройство, используемое для заряда батареи 25.
Далее описывается конфигурация устройства 1 подачи питания и конфигурация транспортного средства 2 в системе бесконтактной подачи питания. В данном варианте осуществления настоящего изобретения в качестве примера транспортного средства 2 описывается электромобиль. На фиг.1 стрелки, показанные пунктирными линиями, представляют сигнальные линии между контроллером 10 и внутренней конфигурацией устройства 1 подачи питания и сигнальные линии между контроллером 20 и внутренней конфигурацией транспортного средства 2. Сплошные линии представляют линии питания, используемые при заряде батареи 25 от источника 3 питания переменного тока (AC).
Устройство 1 подачи питания включает в себя контроллер 10, передающую катушку 11 питания, датчик 12, блок 13 питания, схему 14 самодиагностики, память 15, блок 16 беспроводной связи, дисплейный блок 17, колодку 18 под колесо и датчик 19 нагрузки.
Контроллер 10 является основным контроллером для управления всей работой устройства 1 подачи питания. Конфигурация контроллера 10 описана ниже.
Передающая катушка 11 питания имеет магнитную связь с приемной катушкой 21 питания, расположенной на стороне 2 транспортного средства, и подает питание на приемную катушку 21 питания бесконтактным образом. Передающая катушка 11 питания сформирована в виде кольца параллельно приемной катушке 21 питания. Передающая катушка 11 питания скомпонована на площадке для парковки, где установлено устройство бесконтактной подачи питания согласно данному варианту осуществления. Датчик 12 определяет положение приемной катушки 21 питания относительно передающей катушки 11 питания. Датчиком является, например, датчик изображения, входящий в состав камеры, или т.п., либо инфракрасный датчик. Датчик 12 выводит обнаруженное значение на контроллер 10.
Блок 13 питания представляет собой схему, которая преобразует питание переменного тока, передаваемое от источника 3 питания переменного тока, в высокочастотное AC питания, и передает преобразованное AC питания на передающую катушку 11 питания. Блок 13 питания включает в себя выпрямительный блок, схему коррекции коэффициента мощности (PFC), инвертор и датчик для определения выходного напряжения, которое выводится на передающую катушку 11 питания. Контроллер 10 управляет переключающим устройством инвертора, входящего в блок 13 питания, используя процесс PWM управления, с тем чтобы отобрать желаемую мощность из блока 13 питания на передающую катушку 11 питания.
Схема 14 самодиагностики диагностирует аномалии, такие как обрыв провода, отказ в работе датчика 12 и короткое замыкание на землю системы питания во время бесконтактной подачи питания или т.п. Проводные соединения системы для бесконтактной подачи питания идут от источника 3 AC питания на передающую катушку 11 питания через блок 13 питания и т.п. Схема 14 самодиагностики выдает результат диагноза на контроллер 10.
В памяти 15 записывается идентификационная (ID) информация и информация, переданная со стороны 2 транспортного средства. Эта идентификационная информация заранее выдается каждому устройству 1 подачи питания. Блок 16 беспроводной связи представляет собой приемопередатчик 6, который осуществляет двунаправленную связь с блоком 26 беспроводной связи на стороне транспортного средства 2. Частота, используемая при передаче между блоком 16 беспроводной связи и блоком 26 беспроводной связи, устанавливается равной частоте связи, отличающейся от частоты, используемой периферийными устройствами транспортного средства, такими как «интеллектуальный ключ». Соответственно, маловероятно, что периферийные устройства транспортного средства будут испытывать помехи от передачи между блоком 16 беспроводной связи и блоком 26 беспроводной связи. Периферийным устройством транспортного средства может быть, например, интеллектуальный ключ. Для передачи между блоком 16 беспроводной связи и блоком 26 беспроводной связи может использоваться, например, любая из различных беспроводных систем типа LAN.
Дисплейный блок 17 представляет собой устройство отображения, уведомляющее о состоянии устройства 1 подачи питания. Дисплейный блок 17 сконфигурирован в виде сигнальной лампы, дисплея или т.п.
Колодка 18 под колесо представляет собой механическое устройство, которое предотвращает вращение колеса транспортного средства во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания. Колодка 18 под колесо расположена на земле, на площадке для парковки. Датчик 19 нагрузки определяет нагрузку (давление), прикладываемую к колодке 18 под колесо. При трогании транспортного средства из состояния, в котором вращение колеса транспортного средства заблокировано колодкой 18 под колесо, колесо транспортного средства поворачивается и наезжает на колодку под колесо. Когда колесо транспортного средства наезжает на колодку 18 под колесо, датчик 19 нагрузки определяет давление, приложенное к датчику 19 нагрузки, и выдает определенное значение в контроллер 10.
Далее описывается конфигурация транспортного средства 2. Транспортное средство 2 включает в себя контроллер 20, приемную катушку 21 питания, датчик 22, релейный переключатель 23, блок 24 приемной схемы питания, батарею 25, блок 26 беспроводной связи, дисплей 27, приемник 28 системы GPS, память 29 и переключатель 30 питания.
Назначение контроллера 20 не ограничено выполнением процесса управления зарядом во время заряда батареи 25, но он также выполняет различные процессы управления в системе электромобиля (EV).
Приемная катушка 21 питания расположена в нижней части (шасси) или т.п. транспортного средства 2 между задними колесами транспортного средства. Когда транспортное средство 2 запарковано на заранее определенном парковочном положении, приемная катушка 21 питания оказывается точно над передающей катушкой 11 питания на некотором расстоянии от передающей катушки 11 питания. Приемная катушка 21 питания представляет собой катушку в форме кольца, параллельного поверхности площадки для парковки.
Датчик 22 измеряет ток и напряжение, которые выводятся из приемной катушки 21 питания на батарею 25. Датчик 22 выдает определенное значение на контроллер 20. Релейный переключатель 23 выполняет переключение ВКЛ/ВЫКЛ под управлением контроллера 20. Релейный переключатель 23 подсоединен между приемной катушкой 21 питания и батареей 25. Когда батарея 25 заряжается посредством бесконтактной подачи питания, релейный переключатель 23 включен (состояние ВКЛ).
Блок 24 приемной схемы питания подсоединен между приемной катушкой 21 питания и батареей 25. Блок 24 приемной схемы питания включает в себя, например, схему преобразования, которая преобразует питание на переменном токе, полученное приемной катушкой 21 питания, в питание на постоянном токе, и выпрямительную схему.
Батарея 25 включает в себя множество вторичных элементов, которые соединены последовательно или параллельно. Вторичный элемент представляет собой ионно-литиевую батарею или т.п. Батарея 25 имеет электрическое соединение с приемной катушкой 21 питания через релейный переключатель 23 и блок 24 приемной схемы питания. Батарея 25 обеспечивает питание двигателя (на данной фигуре не показан), который является источником энергии транспортного средства 2, через инвертор. Вдобавок, батарея 25 заряжается от питания, полученного приемной катушкой 21 питания.
Блок 26 беспроводной связи представляет собой приемопередатчик, используемый для беспроводной связи с блоком 16 беспроводной связи на стороне устройства 1 подачи питания. Дисплей 27 расположен, например, на приборной панели транспортного средства 2. Дисплей 27 отображает карту навигационной системы, изображение, фиксируемое камерой в системе обслуживания парковки или т.п. Дисплей 27 отображает состояние устройства 1 подачи питания и отображает местоположение устройства 1 подачи питания на карте. При заряде батареи 25 устройством 1 подачи питания дисплей 27 отображает руководство по заряду.
Приемник 28 системы глобального позиционирования (GPS) получает сигналы, передаваемые со спутников, и определяет текущее местоположение транспортного средства 2. Память 29 представляет собой носитель записи, на котором записана идентификационная информация (ID) и информация, переданная со стороны устройства 1 подачи питания. Эта идентификационная информация приписывается каждому транспортному средству заранее.
Переключатель 30 питания представляет собой переключатель, используемый для переключения между состояниями: Готовность, ВКЛ, Аккумулятор и ВЫКЛ. Переключатель 30 питания является переключателем, который приводится в действие водителем. Состояние Готовность представляет состояние, в котором транспортное средство может перемещаться. Состояние ВКЛ представляет состояние, в котором транспортное средство не может перемещаться, батарея 25 или т.п. подает питание на контроллер 20, и могут использоваться все электрические компоненты транспортного средства 2. Состояние Аккумулятор представляет состояние, в котором транспортное средство не может перемещаться, и возможно использование только некоторых электрических компонент из числа всех электрических компонент, скомпонованных на транспортном средстве 2. Состояние ВЫКЛ представляет состояние в котором транспортное средство не может перемещаться, и ни одна электрическая компонента использоваться не может.
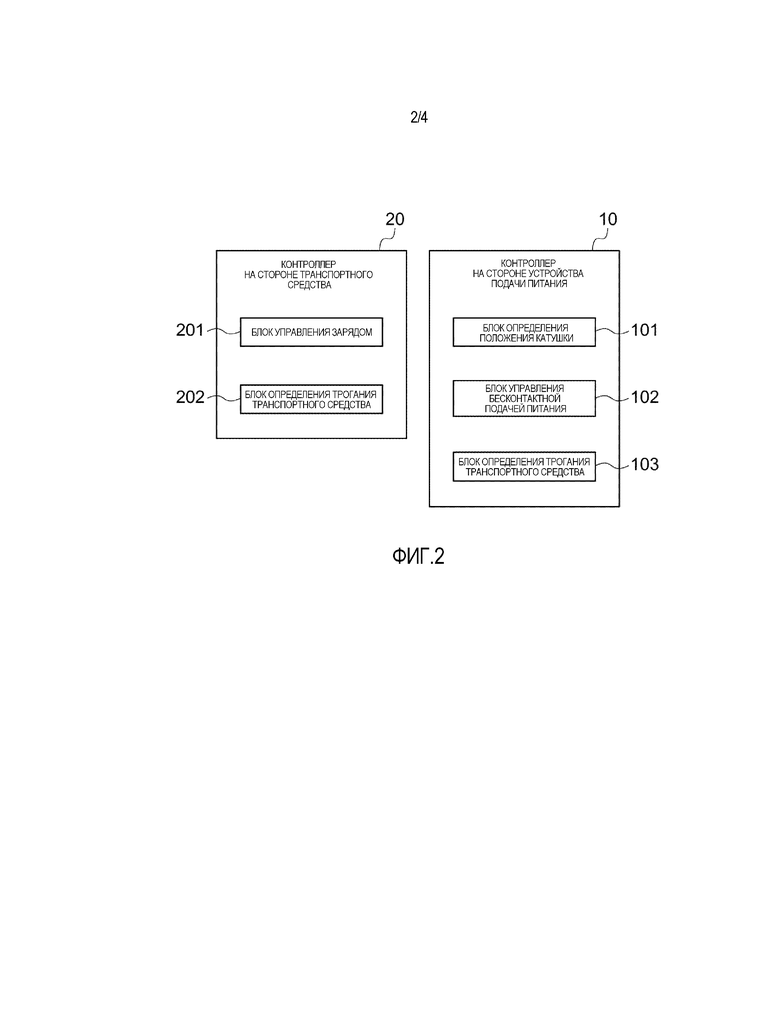
Далее со ссылками на фигуры 1 и 2 описывается конфигурация контроллера 10 на стороне устройства 1 подачи питания и конфигурация контроллера 20 на стороне транспортного средства 2.
Контроллер 10 включает в себя блок 101 определения положения катушки, блок 102 управления бесконтактной подачей питания и блок 103 определения трогания транспортного средства.
Блок 101 определения положения транспортного средства определяет относительное положение приемной катушки 21 питания по отношению к передающей катушке 11 питания, используя датчик 12.
Блок 102 управления бесконтактной подачей питания осуществляет управление блоком 13 питания на основе сигнала, получаемого от блока 16 беспроводной связи. Затем в соответствии с управляющим воздействием со стороны блока 102 управления бесконтактной подачей питания блок 13 питания обеспечивает питание от источника 3 питания переменного тока на передающую катушку 11 питания, управляя тем самым зарядом батареи 25. Блок 102 управления бесконтактной подачей питания получает информацию о величине подачи питания посредством беспроводной связи между блоком 16 беспроводной связи и блоком 26 беспроводной связи. Информация о величине подачи питания представляет собой информацию, которая запрашивается со стороны транспортного средства 2. Блок 102 управления бесконтактной подачей питания управляет блоком 13 питания для выдачи питания от передающей катушки 11 питания на приемную катушку 21 питания на основе полученной величины подачи питания.
Блок 103 определения трогания транспортного средства определяет, должно ли тронуться транспортное средство, на основе значения, определенного датчиком 19 нагрузки, во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания.
Контролер 20 включает в себя блок 201 управления зарядом и блок 202 определения трогания транспортного средства.
Блок 201 управления зарядом управляет состоянием заряда батареи 25 на основе значения напряжения или тока батареи 25, определенного датчиком, и управляет блоком 24 приемной схемы питания, с тем чтобы осуществлять управление зарядом батареи 25.
Блок 202 определения трогания транспортного средства определяет, должно ли тронуться транспортное средство, на основе состояния переключателя 30 питания во время подачи питания от передающей катушки 1 питания на приемную катушку 21 питания.
Далее описывается управление, осуществляемое контроллером 10 и контроллером 20. Сначала после того, как транспортное средство запарковалось на площадке для парковки устройства 1 подачи питания, выполняются описанные процессы управления, как описано ниже, пока нормально не завершиться заряд батареи 25.
Когда транспортное средство 2 запарковано на площадке для парковки устройства 1 подачи питания, и приведена в действие кнопка запуска устройства 11 подачи питания, или когда транспортное средство 2 запарковано на площадке для парковки устройства 1 подачи питания, и блок 16 беспроводной связи получил сигнал запуска, переданный от транспортного средства 2, устройство 1 подачи питания начинает функционировать. Блок 101 определения положения катушек контроллера 10 на стороне устройства подачи питания обнаруживает позиционное отклонение приемной катушки 21 питания относительно передающей катушки 11 питания на основе значения, определенного датчиком 12. Блок 101 определения положения катушек определяет, находится ли позиционное отклонение между катушками в допустимом диапазоне. При выходе позиционного отклонения катушек за пределы допустимого диапазона блок 101 определения положения катушек предписывает изменить положение парковки транспортного средства 2 путем отображения знака перепарковки на дисплейном блоке 17, с тем чтобы положение приемной катушки питания соответствовало положению передающей катушки 11 питания. В качестве альтернативы блок 101 определения положения катушек предписывает изменить положение парковки транспортного средства 2 посредством передачи сигнала, представляющего большое позиционное отклонение между указанными катушками, на сторону транспортного средства 2 путем использования блока 16 беспроводной связи.
С другой стороны, когда позиционное отклонение катушки не выходит за границы допустимого диапазона, блок 101 определения положения катушек передает на сторону 2 транспортного средства сигнал, представляющий состояние, в котором возможна подача питания.
Когда контроллер 20 получает указанный сигнал, он проверяет состояние переключателя 30 питания. При переключении переключателя 30 питания из состояния Готовность в состояние ВЫКЛ, или при переключении переключателя 30 питания из состояния ВКЛ в состояние ВЫКЛ контроллер 20 инициирует переход батареи 25 в состояние заряда путем переключения релейного переключателя 23 из состояния ВЫКЛ в состояние ВКЛ. Затем блок 201 управления зарядом, входящий в состав контроллера 20, определяет состояние заряда батареи 25 перед запуском заряда батареи 25.
Блок 201 управления зарядом вычисляет, какое питание потребуется для зарядки батареи 25 в соответствии с состоянием ее заряда. Блок 201 управления зарядом вычисляет величину подачи питания от передающей катушки 11 питания на приемную катушку 21 питания. Величина подачи питания представляет собой величину подачи питания, необходимую для выдачи питания для зарядки батареи 25 из блока 24 приемной схемы питания. Блок 201 управления зарядом передает командный сигнал о вычисленной величине подачи питания на сторону устройства 1 подачи питания с помощью блока 26 беспроводной связи.
Соотношение между питанием для зарядки батареи 25 и величиной подачи питания, задаваемой стороне устройства 1 подачи питания, запоминается заранее в виде карты управления или т.п. Блок 301 управления зарядом вычисляет величину подачи питания путем обращения к карте управления. Например, величина подачи питания может быть представлена мощностью, получаемой приемной катушкой 21 питания, напряжением, подаваемым на приемную катушку 21 питания, током, протекающим через приемную катушку 21 питания, или временем работы приемной катушки 21 питания.
При получении сигнала с командой, указывающей величину подачи питания, блок 102 управления бесконтактной подачей питания, входящий в состав контроллера 10, на стороне устройства 1 подачи питания вычисляет мощность передачи передающей катушки 11 питания в соответствии с состоянием связи между передающей катушкой 11 питания и приемной катушкой 21 питания. Здесь мощность передачи - это мощность, которую используют для подачи на приемную катушку питания величины подачи питания, запрашиваемой со стороны транспортного средства 2. Блок 102 управления бесконтактной подачей питания может вычислить состояние связи (коэффициент связи) между передающей катушкой 11 питания и приемной катушкой 21 питания путем использования позиционного отклонения между катушками 11 и 21. Это позиционное отклонение представлено значением, определенным датчиком 12. Вдобавок, блок 102 управления бесконтактной подачей питания может вычислить состояние связи (коэффициент связи) путем использования напряжения или тока передающей катушки 11 питания во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания.
Блок 102 управления бесконтактной подачей питания управляет блоком 13 питания, а блок 13 питания выдает вычисленную мощность передачи из передающей катушки питания.
При подаче питания от передающей катушки 11 питания на приемную катушку 21 питания контроллер 20 определяет, равна ли действительная величина подачи питания от передающей катушки 11 питания на приемную катушку 21 питания, величине подачи питания, которая задана стороне устройства 1 подачи питания, на основе значения, определенного датчиком 22. Если действительная величина подачи питания отличается от величины подачи питания, указанной в команде, то блок 201 управления зарядом передает на сторону устройства 1 подачи питания сигнал, представляющий разность между действительной величиной подачи питания и величиной подачи питания, указанной в команде.
Вдобавок, блок 201 управления зарядом управляет блоком 24 приемной схемы питания, с тем, чтобы питание, получаемое приемной катушкой 21 питания, обеспечило упомянутое питание для зарядки батареи 25. Затем выполняется заряд батареи с использованием указанного питания для зарядки. Во время заряда батареи 25 блок 201 управления зарядом управляет состоянием заряда батареи 25.
Когда состояние заряда батареи 25 достигает заданного значения, блок 201 управления зарядом уменьшает выходную мощность, которая выводится на батарею 25 из блока 24 приемной схемы питания, посредством управления блоком 24 приемной схемы питания. Затем, когда состояние батареи 25 достигает заданного значения, блок 201 управления зарядом передает сигнал прекращения для прекращения подачи питания на сторону устройства 1 подачи питания, и затем релейный переключатель 23 переключается в состояние ВЫКЛ. Когда контроллер 10 получает сигнал прекращения, указывающий на прекращение подачи питания, контроллер 10 на стороне устройства 1 подачи питания устанавливает нулевое значение выхода передающей катушки 11 питания посредством управления блоком 13 питания. Вдобавок, когда состояние заряда батареи 25 достигает заданного значения, блок 201 управления зарядом может передать сигнал с командой на уменьшение величины подачи питания от передающей катушки 11 питания на приемную катушку 12 питания на стороне устройства 1 подачи питания.
Далее выполняются описанные процессы управления, как показано ниже, когда транспортное средство должно тронуться во время подачи питания от передающей катушки 111 питания на приемную катушку 21 питания. Блок 202 определения трогания транспортного средства на стороне транспортного средства 2 определяет состояние переключателя 30 питания во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания. Как было описано выше, при заряде батареи 25 посредством бесконтактной подачи питания переключатель 30 питания находится в состоянии ВЫКЛ. В этом состоянии, когда переключатель 30 питания переключается из состояния ВЫКЛ в состояние Готовность в результате приведения в действие переключателя 30 питания водителем, существует высокая вероятность того, что водитель действительно попытается запустить транспортное средство. По этой причине при обнаружении переключения переключателя 30 питания из состояния ВЫКЛ в состояние Готовность блок 202 определения трогания транспортного средства определяет, что транспортное средство должно тронуться с места. Здесь определение трогания транспортного средства включает в себя не только состояние, в котором транспортное средство действительно трогается и колеса транспортного средства вращаются, но также состояние возможного трогания, в котором транспортное средство может тронуться, до действительного трогания транспортного средства.
Между тем, при зарядке батареи 25 системой бесконтактной подачи питания согласно данному варианту осуществления, поскольку транспортное средство и оборудование для подачи питания, скомпонованное на стороне земли, не соединены кабелем или т.п., транспортное средство 2 может наехать на колодку 18 под колесо, трогаясь с места. Вдобавок, при отсутствии колодки 18 под колесо транспортное средство 2 может легче тронуться.
Затем при трогании транспортного средства 2 увеличивается позиционное отклонение между передающей катушкой 11 питания и приемной катушкой 21 питания и уменьшается эффективность передачи питания между этими катушками. В это время, когда контроллер 10 на стороне устройства 1 подачи питания управляет блоком 13 питания, поддерживая указанную величину подачи питания от передающей катушки 11 питания на приемную катушку 21 питания, увеличивается напряжение, подаваемое на передающую катушку 11 питания. Таким образом, возрастает нагрузка на передающую катушку 11 питания и блок 13 питания. Вдобавок, при увеличении напряжения, подаваемого на передающую катушку 11 питания, также увеличивается рассеяние магнитного потока, что приводит к уменьшению эффективность передачи энергии.
По этой причине в данном варианте осуществления, когда блок 202 определения трогания транспортного средства определяет, что транспортное средство должно стронуться, блок 201 управления зарядом, чтобы уменьшить величину подачи питания, передает сигнал прекращения подачи питания на сторону устройства 1 подачи питания.
Другими словами, блок 201 управления зарядом передает сигнал с командой прекращения подачи питания на сторону устройства 1 подачи питания, с тем, чтобы величина подачи питания стала ниже величины, указанной командой, во время заряда батареи 25.
Когда контроллер 10 получает сигнал прекращения подачи питания, блок 102 управления бесконтактной подачей питания, входящий в состав контроллера 10, устанавливает в нуль величину подачи питания от передающей катушки 11 питания на приемную катушку 21 питания путем установки в нуль выхода из блока 13 питания в передающую катушку 11 питания, прекращая тем самым подачу питания. Соответственно, когда транспортное средство должно тронуться во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания, выход из блока 13 питания на передающую катушку 11 питания не увеличивается. В результате предотвращается приложение большой нагрузки к блоку 13 питания и передающей катушке 11 питания, и можно будет избежать снижения долговечности устройства 1 подачи питания из-за приложения большой нагрузки.
Вдобавок, как описано ниже, во время подачи питания от передающей катушки 11 на приемную катушку 21 питания устройство 1 подачи питания определяет, должно ли транспортное средство тронуться, и выполняет управление, уменьшая величину подачи питания на основе результата указанного определения.
Блок 202 определения трогания транспортного средства на стороне устройства 1 подачи питания определяет, должно ли транспортное средство тронуться во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания, на основе значения, определенного датчиком 19 нагрузки. В частности, блок 202 определения трогания транспортного средства сравнивает значение, определенное датчиком 12 нагрузки, с предварительно определенным порогом. Когда значение, определенное датчиком, превышает заранее определенный порог, то блок 202 определения трогания транспортного средства определяет, что транспортное средство 2 должно тронуться. С другой стороны, когда значение, определенное датчиком 19, меньше или равно заранее определенному порогу, блок 202 определения трогания транспортного средства определяет, что транспортное средство 2 не должно тронуться.
Когда определено, что транспортное средство 2 должно тронуться, блок 102 управления бесконтактной подачей питания устанавливает в нуль величину подачи питания от передающей катушки 11 питания на приемную катушку 21 питания путем установки в нуль выхода из блока 13 питания на передающую катушку 11 питания, в результате чего прекращается подача питания. Соответственно, когда устройство 1 подачи питания определяет, что транспортное средство 2 должно тронуться, устройство 1 подачи питания предотвращает подачу большой нагрузки на блок 13 питания и передающую катушку 11 питания из-за трогания транспортного средства 2.
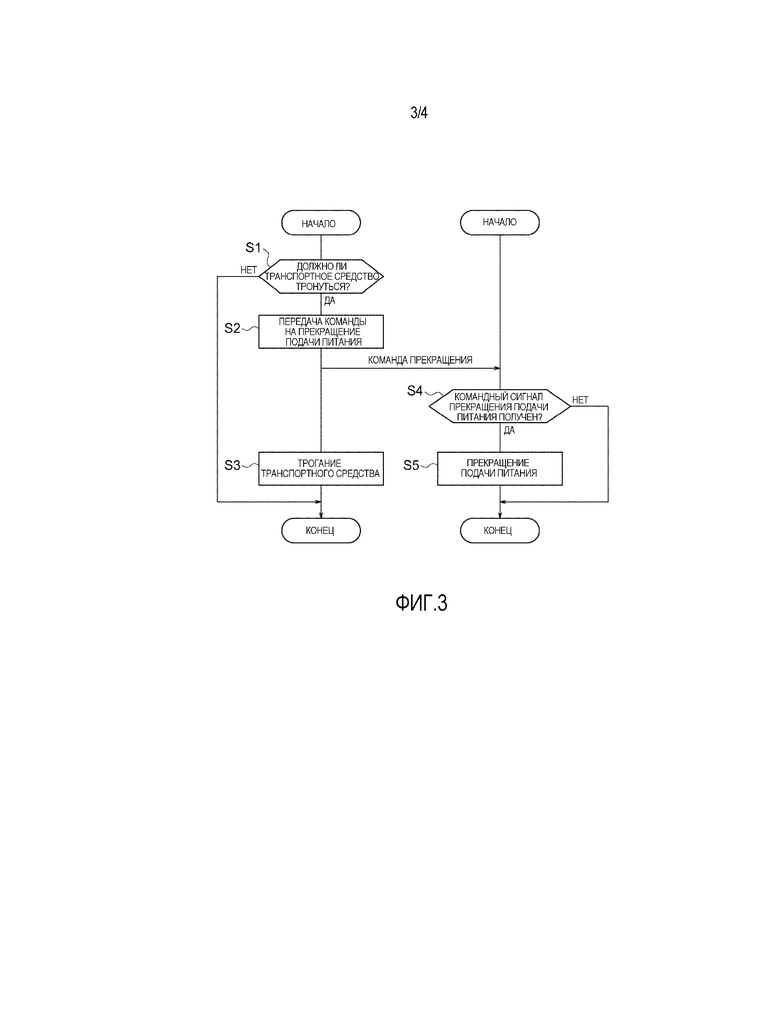
Далее со ссылками на фигуры 3 и 4 описывается последовательность управления, выполняемая контроллерами 10 и 20. На фиг.3 представлена блок-схема, иллюстрирующая последовательность управления, выполняемую контроллерами 10 и 20, когда на стороне транспортного средства 2 определяется, должно ли тронуться транспортное средство 2. На фиг.4 представлена блок-схема, иллюстрирующая последовательность управления, выполняемую контроллерами 10 и 20, когда на стороне устройства 1 подачи питания определяется, должно ли тронуться транспортное средство 2.
Как показано на фиг.1, на этапе S1, блок 102 определения трогания транспортного средства, входящий в состав контроллера 10 на стороне транспортного средства 2, определяет, должно ли тронуться транспортное средство 2, посредством определения состояния переключателя 30 питания. Когда блок 102 определения трогания транспортного средства определяет, что транспортное средство не должно стронуться с места, поток управления прекращается.
С другой стороны, когда блок 102 определения трогания транспортного средства определяет, что транспортное средство 1 должно тронуться, на этапе S2 контроллер 10 передает беспроводным путем сигнал с командой прекращения подачи питания (сигнал прекращения) на сторону устройства 1 подачи питания. На этапе S3 контроллер 10 действительно инициирует трогание транспортного средства с места. Затем поток управления заканчивается.
На стороне устройства 1 подачи питания на этапе S4 контроллер 10 определяет, получен ли сигнал с командой прекращения подачи питания. Если сигнал прекращения не получен, то процесс управления заканчивается. В противном случае, если сигнал прекращения получен, то на этапе S5 блок 102 управления бесконтактной подачей питания, входящий в состав контроллера 10, прекращает подачу питания посредством управления блоком 13 питания. Затем поток управления заканчивается.
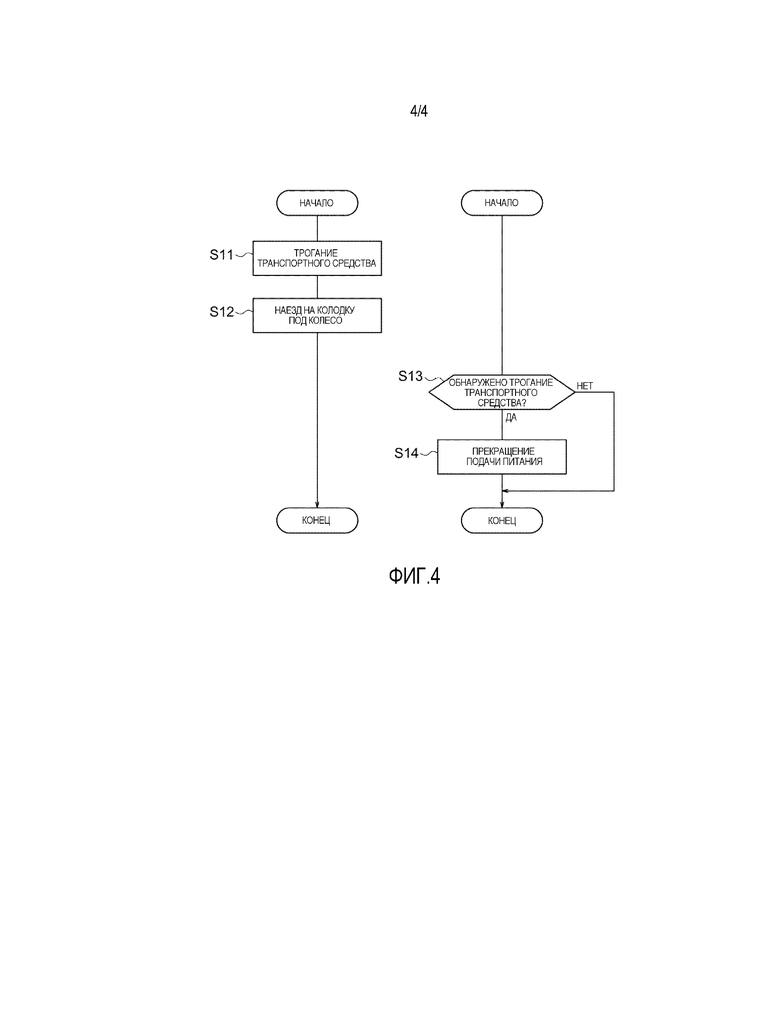
Как показано на фиг.4, на стороне транспортного средства 2 контроллер 10 на этапе S11 действительно инициирует трогание транспортного средства 2. На этапе S12 колесо транспортного средства 2 наезжает на колодку 18 под колесо. Затем поток управления на стороне транспортного средства, показанный на фиг.4, заканчивается. На стороне устройства 1 подачи питания блок 103 определения трогания транспортного средства, входящий в состав контроллера 10, на этапе S13 определяет, должно ли транспортное средство тронуться, на основе значения, определенного датчиком 19 нагрузки. Когда блок 103 определения трогания транспортного средства определяет, что транспортное средство должно тронуться с места, поток управления заканчивается. В противном случае, когда блок 103 определения трогания транспортного средства определяет, что транспортное средство не должно тронуться, блок 102 управления бесконтактной подачей питания, входящий в состав контроллера 10, на этапе S14 прекращает подачу питания под управлением блока 13 питания, после чего поток управления заканчивается.
Как было описано выше, в данном варианте осуществления контроллер 10 на стороне транспортного средства 2 определяет, должно ли транспортное средство тронуться, во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания. Когда контроллер 10 определяет, что транспортное средство 2 должно тронуться с места, он выдает команду на уменьшение величины подачи питания на устройство 1 подачи питания. Соответственно, когда транспортное средство трогается с места во время бесконтактной передачи питания, можно предотвратить приложение большой нагрузки к схеме на стороне устройства 1 подачи питания. В результате может быть обеспечена защита указанной схемы на стороне устройства 1 подачи питания. Вдобавок, в состоянии, в котором эффективность передачи питания низкая, напряжение на передающей катушке 11 питания не увеличивается, и, следовательно, можно также предотвратить увеличение рассеяния магнитного потока.
Вдобавок, в данном варианте осуществления контроллер 20 определяет, должно ли транспортное средство 2 тронуться, на основе состояния переключателя 30 питания. Соответственно, можно определить должно ли транспортное средство 2 тронуться, посредством использования простой конфигурации. Вдобавок, поскольку имеется запас времени пока транспортное средство 2 не тронется с места, после того как переключатель 30 питания переключится из состояния ВЫКЛ в состояние Готовность, можно вовремя установить в нуль величину подачи питания, или можно вовремя приблизить величину подачи питания к нулевому значению. В результате может быть обеспечена защита упомянутой схемы на стороне устройства 1 подачи питания.
Кроме того, в данном варианте осуществления контроллер 10 на стороне устройства подачи питания определяет, должно ли транспортное средство 2 тронуться, во время подачи питания от передающей катушки 11 питания на приемную катушку 21 питания. Когда контроллер 10 определяет, что транспортное средство 2 должно тронуться с места, он обеспечивает управление, состоящее в уменьшении величины подачи питания. Соответственно, когда транспортное средство 2 тронулось с места во время бесконтактной подачи питания, предотвращается приложение большой нагрузки к указанной схеме на стороне устройства 1 подачи питания. В результате можно обеспечить защиту схемы на стороне устройства 1 подачи питания. Вдобавок, в состоянии, когда эффективность передачи питания низкая, напряжение на передающей катушке 11 питания оказывается невысоким, и поэтому можно подавить увеличение рассеяния магнитного потока между упомянутыми катушками.
Вдобавок, в данном варианте осуществления контроллер 10 определяет должно ли транспортное средство тронуться, на основе значения, определенного датчиком 19 нагрузки. Если котроллер 10 на стороне транспортного средства 2 определяет, что транспортное средство 2 должно тронуться с места, и результат этого определения передан на сторону 1 устройства подачи питания с использованием беспроводной передачи, вероятно, что потребуется некоторое время для этой беспроводной передачи. В противном случае, в данном варианте осуществления, поскольку упомянутое определение выполняется с использованием значения определенного датчиком 19 нагрузки, размещенном на стороне устройства 1 подачи питания, можно сократить временное отставание с момента определения трогания транспортного средства 2 до упомянутого уменьшения величины подачи питания.
Кроме того, в модифицированном примере данного варианта осуществления блок 202 определения трогания транспортного средства может определить, должно ли транспортное средство 2 тронуться, на основе положения рычага переключения передачи. Когда транспортное средство 2 должно тронуться с места, положение рычага переключения передач изменяется в диапазоне передач (D диапазон (диапазон передач прямого хода) или R диапазон (диапазон реверса) передач обратного хода). По этой причине при изменении положения рычага переключения передач в диапазоне передач прямого хода, блок 202 определения трогания транспортного средства определяет, что транспортное средство 2 должно тронуться с места. Соответственно, можно определить, должно ли транспортное средство 2 тронуться, путем использования простой конфигурации.
Вдобавок, в модифицированном примере данного варианта осуществления блок 202 определения трогания транспортного средства определяет, должно ли транспортное средство тронуться. Если транспортное средство должно тронуться, пользователь выполняет операцию открывания/закрывания двери, чтобы сесть в транспортное средство 2. По этой причине при переходе двери в закрытое состояние из открытого состояния или при переходе двери из открытого состояния в закрытое состояние блок 202 определения трогания транспортного средства определяет, что транспортное средство 2 должно тронуться. Соответственно, можно определить, должно ли транспортное средство 2 тронуться, путем использования простой конфигурации и можно определить, должно ли транспортное средство 2 тронуться, прежде чем оно действительно начало движение.
Кроме того, в данном варианте осуществления, когда контроллер 20 на стороне транспортного средства 2 определяет, что транспортное средство 2 должно тронуться, он может выдать команду на уменьшение величины подачи питания на устройство 1 подачи питания вместо выдачи команды прекращения на устройство 1 подачи питания. Команда прекращения - это команда на прекращение подачи питания от передающей катушки 11 питания на приемную катушку 21, а команда на уменьшение величины подачи питания - это команда, устанавливающая величину подачи питания, не равную нулю.
Вдобавок, в данном варианте осуществления, когда контроллер 10, установленный на стороне устройства 1 подачи питания, определяет, что транспортное средство 2 должно трогаться с места, контроллер 10 может инициировать управляющее воздействие с целью уменьшения величины подачи питания вместо управляющего воздействия, имеющего своей целью прекращение подачи питания от передающей катушки 11 питания на приемную катушку 21 питания во время управления блоком 13 питания. Управляющее воздействие, уменьшающее величину подачи питания, представляет собой управляющее воздействие, представляющее уменьшение величины управляющего воздействия с ненулевым значением или управляющее воздействие, уменьшающее величину подачи питания до значения, меньшего величины подачи питания, установленной до определения трогания транспортного средства.
Кроме того, в данном варианте осуществления функция определения того, должно ли транспортное средство 2 тронуться, обеспечена в устройстве 1 подачи питания и транспортном средстве 2, эта функция может быть обеспечена в любом одном из них: в устройстве 1 подачи питания или в транспортном средстве 2. Вдобавок, в данном варианте осуществления, когда функция уменьшения величины подачи питания на основе результата определения того, должно ли транспортное средство 2 тронуться, обеспечена и в устройстве 1 подачи питания и в транспортном средстве 2, эта функция управления может быть обеспечена в любом одном из них: в устройстве 1 подачи питания или транспортном средстве 2.
Вышеописанный контроллер 20 соответствует «контроллеру на стороне транспортного средства» настоящего изобретения, переключатель 30 питания соответствует «переключателю», а контроллер 10 соответствует «контроллеру» настоящего изобретения.
Описание позиционных обозначений
1 - Устройство подачи питания
2 - Транспортное средство
3 - Источник питания переменного тока
10 и 20 - Контроллер
11 - Передающая катушка питания
12 - Датчик
13 - Блок питания
16 - Блок беспроводной связи
21 - Приемная катушка питания
24 - Блок приемной схемы питания
25 - Батарея
26 - Блок беспроводной связи
30 - Переключатель питания
101 - Блок определения положения катушки
102 - Блок управления бесконтактной подачей питания
103 - Блок определения трогания транспортного средства
201 - Блок управления зарядом
202 - Блок определения трогания транспортного средства
Изобретение относится к области электротехники. Технический результат - предотвращение приложения высокой нагрузки к схеме блока передачи питания при трогании транспортного средства. Обеспечено зарядное устройство на стороне транспортного средства, расположенное на транспортном средстве (2). Зарядное устройство включает в себя приемную катушку (21) питания, которая получает питание от передающей катушки (11), расположенной в устройстве (1) подачи питания, бесконтактным образом по меньшей мере посредством магнитной связи, батарею (25), которая заряжается полученным питанием от приемной катушки (21) питания, и контроллер (20) на стороне транспортного средства, который управляет зарядом батареи и выдает команду, указывающую величину подачи питания на устройство подачи питания. Величина подачи питания представляет собой величину подачи питания от передающей катушки питания на приемную катушку питания. Контроллер (20) на стороне транспортного средства определяет, должно ли тронуться транспортное средство (2). Контроллер (20) на стороне транспортного средства выдает команду на уменьшение величины подачи питания на устройство (1) подачи питания, когда контроллер (20) на стороне транспортного средства определяет, что транспортное средство (2) должно тронуться, во время подачи питания от передающей катушки (11) питания на приемную катушку (21) питания. 1 з.п. ф-лы, 4 ил.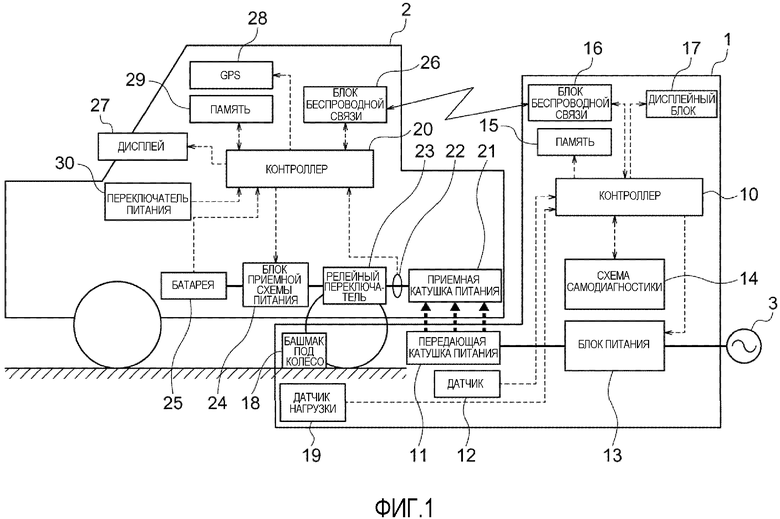
1. Зарядное устройство, расположенное на транспортном средстве, причем зарядное устройство содержит:
приемную катушку питания, получающую питание от передающей катушки питания, расположенной в устройстве подачи питания, бесконтактным образом через по меньшей мере магнитную связь в состоянии, в котором приемная катушка питания доходит до положения, обеспечивающего поддержание некоторого расстояния от передающей катушки питания, расположенной на площадке для парковки;
батарею, заряжаемую питанием от приемной катушки питания; и
контроллер на стороне транспортного средства, управляющий зарядом батареи и выдающий команду, указывающую величину подачи питания, на устройство подачи питания, причем величина подачи питания представляет собой величину подачи питания от передающей катушки питания на приемную катушку питания, и
переключатель, выполняющий переключение между состоянием, в котором транспортное средство может тронуться, и состоянием, в котором транспортное средство не может тронуться;
причем контроллер на стороне транспортного средства определяет, может ли тронуться транспортное средство из состояния, в котором транспортное средство запарковано, на основании либо состояния упомянутого переключателя, либо состояния рычага переключения передач, расположенного на транспортном средстве, и
контроллер на стороне транспортного средства выдает команду на уменьшение величины подачи питания на устройство подачи питания до того, как транспортное средство стронется, когда контроллер на стороне транспортного средства определяет, что транспортное средство может тронуться, во время подачи питания от передающей катушки питания на приемную катушку питания.
2. Зарядное устройство по п. 1, в котором контроллер на стороне транспортного средства определяет, что транспортное средство может тронуться, когда рычаг переключения передач, расположенный на транспортном средстве, переводится в одно из положений диапазона передач переднего хода.
| JP 5081783 B2, 28.11.2012 | |||
| СПОСОБ СИНТЕЗА ДИАРИЛПИРИМИДИНОВОГО НЕНУКЛЕОЗИДНОГО ИНГИБИТОРА ОБРАТНОЙ ТРАНСКРИПТАЗЫ | 2010 |
|
RU2556986C2 |
| WO 2013039160 A1, 21.03.2013 | |||
| EA 201100825 A1, 30.12.2011 | |||
| СИСТЕМА ЗАРЯДКИ И СПОСОБ ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ЗАРЯДКИ | 2008 |
|
RU2438887C1 |
| СИСТЕМА И СПОСОБ ИНДУКТИВНОЙ ЗАРЯДКИ АККУМУЛЯТОРА | 2007 |
|
RU2469452C2 |

