Область техники
Изобретение относится к аппаратуре и устройству для испытания компонента, такого как тело из бетона или другой строительный компонент, с помощью ультразвука.
Предшествующий уровень техники
Неразрушающее испытание компонентов при помощи ультразвука является важным инструментом в различных областях техники. Например, оно может быть использовано для обнаружения арматуры, пустот, трещин и неоднородностей в строительных материалах, таких как бетон.
Устройство этого типа показано в US 7587943. Оно содержит множество ультразвуковых преобразователей, расположенных в корпусе. Управляющая электроника предназначена для индивидуальной передачи и/или приема сигналов посредством датчиков (измерительных преобразователей).
Для работы с устройством, пользователь удерживает его напротив компонента, подлежащего испытанию, и затем преобразователи приводятся в действие для выполнения операции сканирования.
Раскрытие изобретения
В первом аспекте настоящего изобретения, решаемая задача заключается в том, чтобы обеспечить аппаратуру и устройство такого типа, которое является простым в обращении пользователем.
Эта задача решается с помощью устройства для испытания компонента с помощью ультразвука, содержащего следующие элементы:
- Корпус: Корпус образует механическую раму устройства.
- Множество ультразвуковых преобразователей: Преобразователи расположены на стороне зондирования корпуса. Они являются двунаправленными преобразователями и могут приводиться в действие, чтобы принимать, а также испускать ультразвуковые волны. Измерение может выполняться путем удерживания стороны зондирования корпуса с преобразователями напротив компонента, подлежащего испытанию.
- Управляющие электронные средства: Управляющие электронные средства расположены в корпусе и приспособлены и структурированы для приведения в действие преобразователей.
- Механический переходник рукояток, расположенный на корпусе: Механический переходник рукояток сформирован с возможностью установки по меньшей мере одной рукоятки на корпусе.
- Набор рукояток различной формы: Каждая рукоятка структурирована с возможностью установки на механическом переходнике рукояток.
За счет обеспечения устройства с набором рукояток различной формы, оно может быть более просто адаптировано к потребностям пользователя.
ʺНабор рукояток различной формыʺ следует понимать как содержащий множество рукояток, причем по меньшей мере две из этих рукояток выполнены в отличающейся друг от друга форме.
Предпочтительно, механический переходник рукояток устройства структурирован и выполнен с возможностью позиционирования на нем альтернативно одной, а также двух рукояток одновременно. Другими словами, в зависимости от текущих потребностей (например, в зависимости от того, одну или обе руки пользователь хочет использовать для удержания устройства), пользователь может установить одну рукоятку, но он может также установить две рукоятки.
Механический переходник рукояток может включать в себя множество механических адаптеров, расположенных на ʺпервой монтажной сторонеʺ корпуса. Это первая монтажная сторона, которая может, в частности, представлять собой плоскую или криволинейную поверхность устройства, расположена поперечно, в частности перпендикулярно, к стороне зондирования корпуса. В этом контексте, ʺперпендикулярноʺ предпочтительно указывает угол 90° +/- 10°. Первая монтажная сторона проходит между первой и второй торцевой стороной корпуса.
Предпочтительно, набор рукояток содержит по меньшей мере одну ʺпервую рукояткуʺ. Эта первая рукоятка имеет секцию основания и структурирована с возможностью соединения с по меньшей мере одним из адаптеров, в частности, сформирована, чтобы сопрягаться с по меньшей мере один адаптером. Она также имеет секцию захвата, чтобы захватываться пользователем. Секция захвата расположена так, что когда первая рукоятка смонтирована на корпусе, секция захвата проходит от упомянутого корпуса в центре между первой и второй торцевой стороной корпуса. В этом контексте, ʺв центреʺ предпочтительно понимается так, что расстояния секции захвата от первой и второй торцевых сторон отличаются не более чем на 10%.
Такая первая рукоятка позволяет держать устройство по центру, как правило, одной рукой.
Устройство может также содержать по меньшей мере одну ʺвторую рукояткуʺ. Вторая рукоятка имеет секцию основания, приспособленную и структурированную с возможностью соединения с по меньшей мере одним из адаптеров, в частности, сформирована, чтобы сопрягаться с упомянутым по меньшей мере одним адаптером. Она также имеет секцию захвата, чтобы захватываться пользователем. Вторая рукоятка с формирована так, что когда упомянутая вторая рукоятка смонтирована на корпусе, секция захвата выступает над первой или второй торцевой стороной корпуса.
В этом случае набор рукояток предпочтительно содержит по меньшей мере две вторых рукоятки, и механический переходник рукояток приспособлен и структурирован с возможностью позиционирования на нем двух вторых рукояток одновременно, причем секции захвата смонтированных рукояток расположены на противоположных сторонах упомянутого корпуса. Эта установка особенно удобна, когда пользователь хочет держать устройство обеими руками.
В другом предпочтительном варианте осуществления устройство дополнительно содержит электрический переходник рукояток, расположенный на его корпусе. Этот электрический переходник рукояток структурирован с возможностью обеспечения электрического соединения с по меньшей мере одной из рукояток, смонтированных на механическом переходнике рукояток. Кроме того, по меньшей мере часть рукояток содержит приводимый в действие пользователем элемент, такой как кнопка, ползунок (слайдер) или переключатель, с помощью которого устройство может управляться через электрический переходник рукояток. В этом контексте, термин ʺуправлениеʺ следует понимать как операцию, управляющую по меньшей мере одним аспектом устройства. Например, приводимый в действие пользователем элемент может использоваться для запуска измерения, для регулировки усиления, для изменения режима измерения или для изменения режима работы дисплея на устройстве и т.д.
Предпочтительно, электрический переходник рукояток содержит набор контактных элементов на стороне устройства, а также на стороне рукоятки, которые автоматически вступают в контакт друг с другом, когда рукоятка смонтирована на устройстве.
Изобретение также относится к аппаратуре для испытания компонента с помощью ультразвука. Аппаратура содержит несколько устройств вышеуказанного типа, а также по меньшей мере один механический соединитель (разъем). Другими словами, аппаратура представляет собой набор из нескольких устройств, и дополнительно содержит упомянутый механический разъем. Механический разъем структурирован и приспособлен для механического соединения двух устройств друг с другом путем прикрепления к механическим переходникам ручек этих двух устройств.
Во втором аспекте настоящего изобретения, должна быть решена задача обеспечения аппаратуры для испытания компонента с помощью ультразвука, которая обеспечивает свободу для конфигурирования измерения в соответствии с потребностями пользователя.
Эта задача решается с помощью аппаратуры, содержащей множество идентичных устройств, причем каждое устройство содержит
- Корпус: Корпус образует механическую раму устройства.
- Множество ультразвуковых преобразователей: Преобразователи расположены на стороне зондирования корпуса. Они являются двунаправленными преобразователями и могут приводиться в действие, чтобы принимать, а также испускать ультразвуковые волны. Измерение может выполняться путем удерживания стороны зондирования корпуса с преобразователями напротив компонента, подлежащего испытанию.
- Управляющие электронные средства: Управляющие электронные средства расположены в корпусе и приспособлены и структурированы для приведения в действие преобразователей.
- Интерфейс одноранговых устройств: Этот интерфейс приспособлен и структурирован для установления связи с по меньшей мере одним другим устройством из устройств аппаратуры.
- Главный контроллер: Главный контроллер приспособлен и структурирован с возможностью управления упомянутым по меньшей мере одним другим устройством через интерфейс одноранговых устройств.
Другими словами, аппаратура содержит множество идентичных устройств. Каждое из этих устройств содержит ультразвуковые преобразователи, а также упомянутый интерфейс одноранговых устройств и упомянутый главный контроллер. Главный контроллер способен управлять по меньшей мере одним, в частности всеми, из других устройств аппаратуры через интерфейс одноранговых устройств. Следовательно, каждое устройство в аппаратуре может действовать в качестве главного устройства, которое способно управлять одним или несколькими другими устройствами аппаратуры. Это повышает гибкость при сборке нескольких устройств в сложную архитектуру измерения.
В данном контексте, два устройства считаются ʺидентичнымиʺ, если они имеют одинаковую функциональную, электрическую и механическую структуру, а также одинаковую прошивку. Они могут отличаться, однако, в нефункциональных аспектах, например, по их цвету или их серийному номеру.
Предпочтительно, каждое устройство содержит несколько каналов, причем каждый канал включает в себя по меньшей мере один из преобразователей. Другими словами, каждый преобразователь соотносится с каналом. Каждый канал имеет режим передачи для передачи ультразвуковых сигналов, а также режим приема для приема ультразвуковых сигналов. Главный контроллер каждого устройства приспособлен и структурирован, чтобы
- локально и индивидуально управлять режимом каналов на том же устройстве, а также
- дистанционно и индивидуально управлять режимом каналов на упомянутом по меньшей мере одном другом устройстве.
Следовательно, в этом варианте осуществления, один главный контроллер может индивидуально управлять каналами на устройстве, которому он принадлежит, а также режимом работы каналов другого устройства через интерфейс одноранговых устройств. Это делает архитектуру более универсальной в том, что один главный контроллер может управлять большим числом каналов. В частности, главный контроллер приспособлен, чтобы конфигурировать некоторые из каналов другого устройства так, чтобы находиться в режиме передачи, а некоторые другие - в режиме приема.
Интерфейс одноранговых устройств предпочтительно содержит канал передачи данных, приспособленный и структурированный так, чтобы передавать информацию, описывающую сигнал, подлежащий генерации в упомянутом режиме, и/или описывающую сигнал, принимаемый в упомянутом режиме приема, таким образом, позволяя (в текущее время активному) главному контроллеру управлять передаваемыми сигналами и/или осуществлять сбор принимаемых сигналов отдельных каналов своего собственного и других устройств.
В дополнение к каналу передачи данных, интерфейс одноранговых устройств может включать в себя канал запуска в реальном времени, приспособленный и структурированный для синхронизации устройств по времени. В этом случае канал передачи данных может формировать соединение не в реальном времени между устройствами. В этом контексте, термин ʺсоединение не в реальном времениʺ относится предпочтительно к соединению, сигналы которого не синхронизированы с ультразвуковыми импульсами.
Устройство может дополнительно включать в себя блок-хост, приспособленный и структурированный для управления аппаратурой. Другими словами, блок-хост обеспечивает средство для пользователя, чтобы управлять работой аппаратуры. Этот блок-хост отделен от устройств, и он предпочтительно имеет корпус отдельный от корпусов устройств. В этом случае, устройства могут оставаться идентичными и простыми, в то время как имеется выделенная часть оборудования, которая формирует центральное управление аппаратуры.
В этом случае каждое устройство дополнительно содержит интерфейс данных хоста, приспособленный и структурированный для соединения главного контроллера с блоком-хостом. Блок-хост приспособлен и структурирован для соединения с главным контроллером первого одного из устройств и для управления всеми устройствами через главный контроллер этого первого устройства. Другими словами, достаточно соединить блок-хост с одним из устройств для управления всеми ими.
Для того чтобы осуществлять тонкую настройку измерения через блок-хост, интерфейс данных хоста может быть приспособлен и сконструирован, чтобы передавать информацию, описывающую сигнал, подлежащий генерации в режиме передачи, и/или описывающую сигнал, принимаемый в режиме приема, отдельно для каждого из каналов аппаратуры. Следовательно, блок-хост может управлять каждым каналом отдельно и/или принимать измеренный сигнал из каждого отдельного канала.
Кроме того, интерфейс данных хоста может быть приспособлен и структурирован так, чтобы индивидуально управлять режимом всех каналов упомянутой аппаратуры. Это позволяет полностью конфигурировать режимы передачи и приема всей аппаратуры через блок-хост.
Аппаратура и устройство в соответствии с настоящим изобретением могут быть использованы для испытания любого типа образца, в частности, образцов из бетона.
Краткое описание чертежей
Изобретение может быть лучше понято, и задачи иные, чем те, которые изложены выше, станут очевидными при рассмотрении следующего подробного их описания. Это описание ссылается на прилагаемые чертежи, на которых:
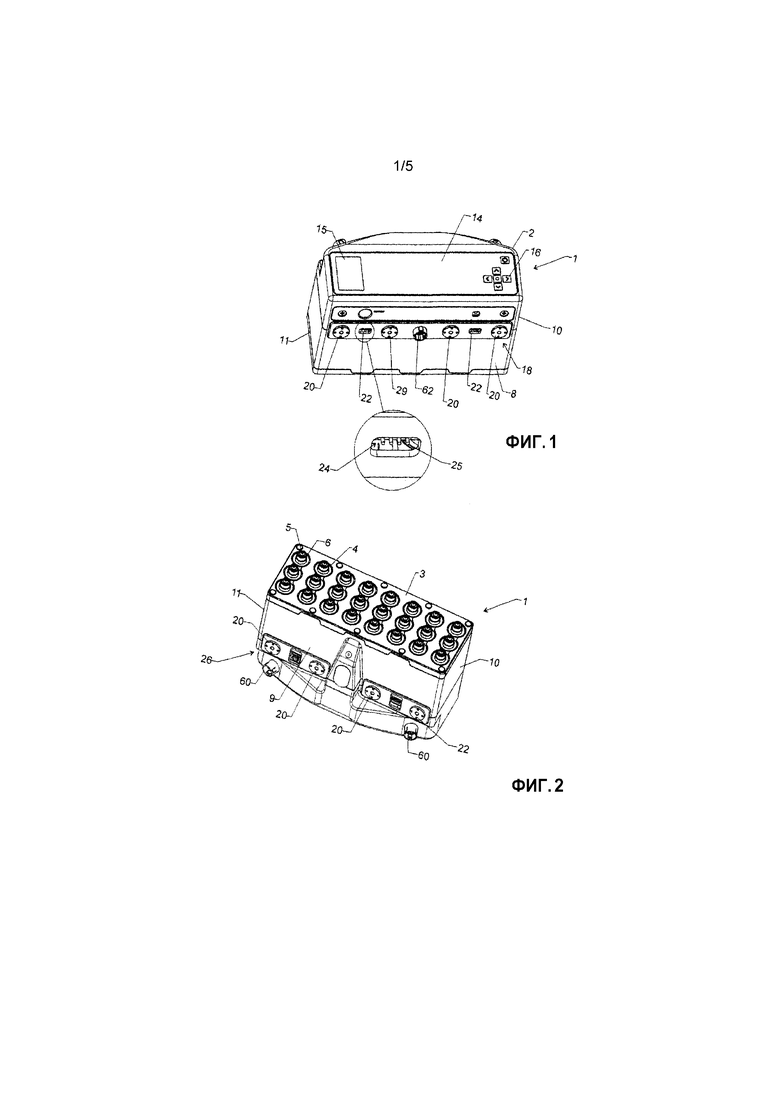
Фиг. 1 показывает устройство для испытания компонента с помощью ультразвука с его первой монтажной стороны,
Фиг. 2 показывает устройство согласно фиг. 1 с его второй монтажной стороны,
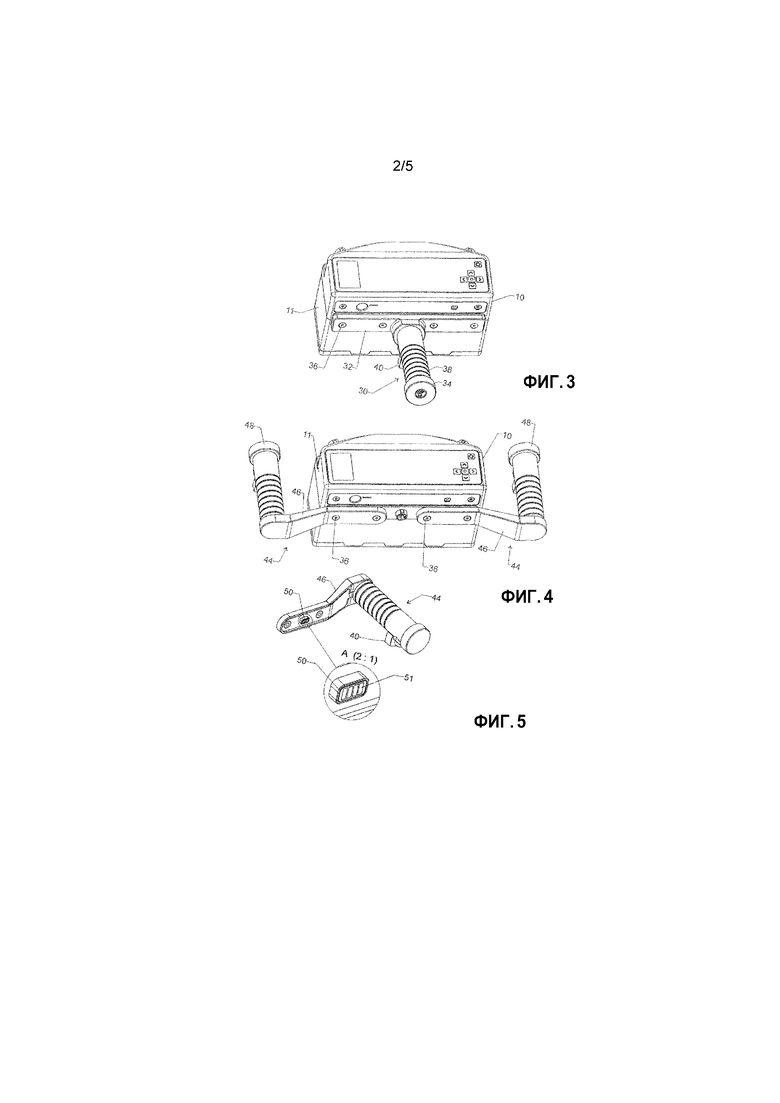
Фиг. 3 показывает устройство согласно фиг. 1 с первой рукояткой, прикрепленной к нему,
Фиг. 4 показывает устройство согласно фиг. 1 с двумя вторыми рукоятками, прикрепленными к нему,
Фиг. 5 показывает одну вторую рукоятку устройства,
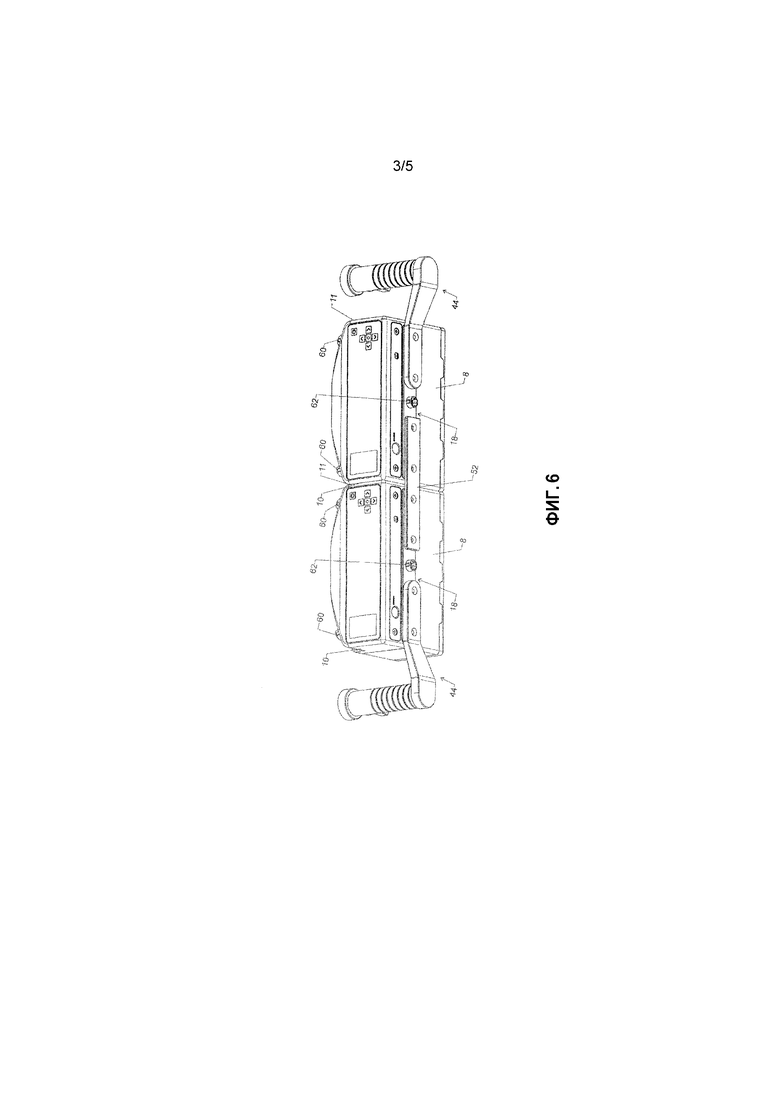
Фиг. 6 показывает два механически соединенных устройства согласно фиг. 1 с двумя вторыми рукоятками, прикрепленными к ним,
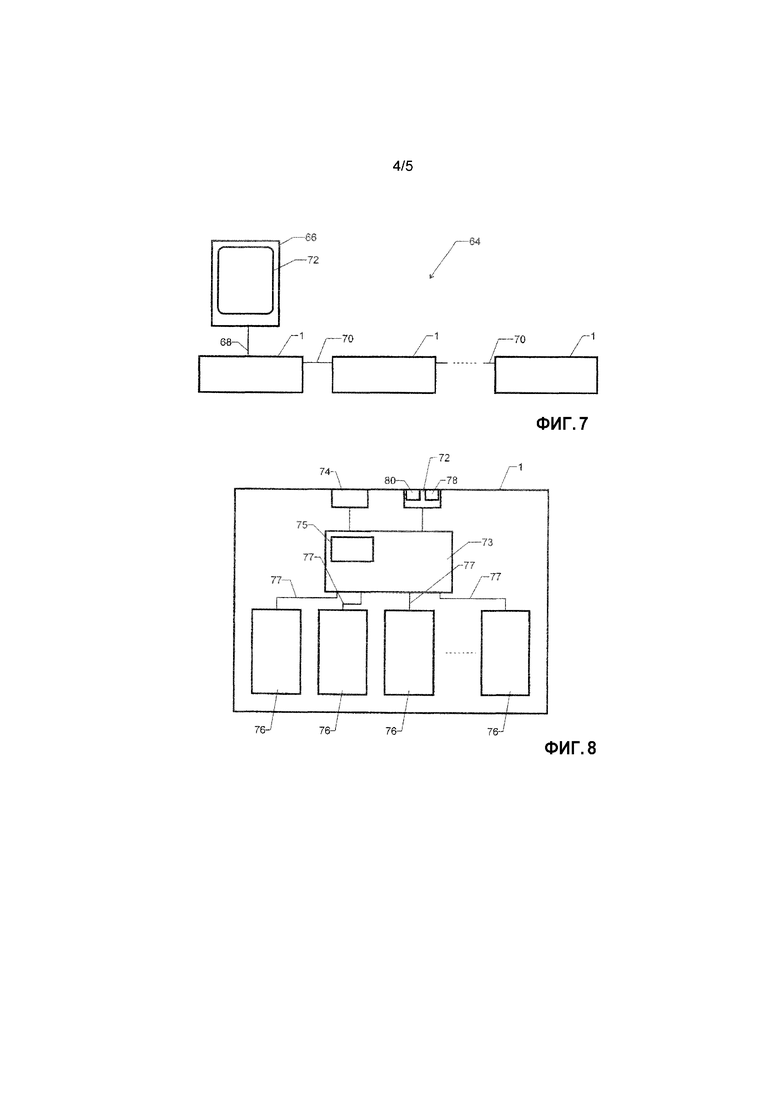
Фиг. 7 является блок-схемой аппаратуры, включающей в себя множество устройств,
Фиг. 8 является блок-схемой одного устройства, и
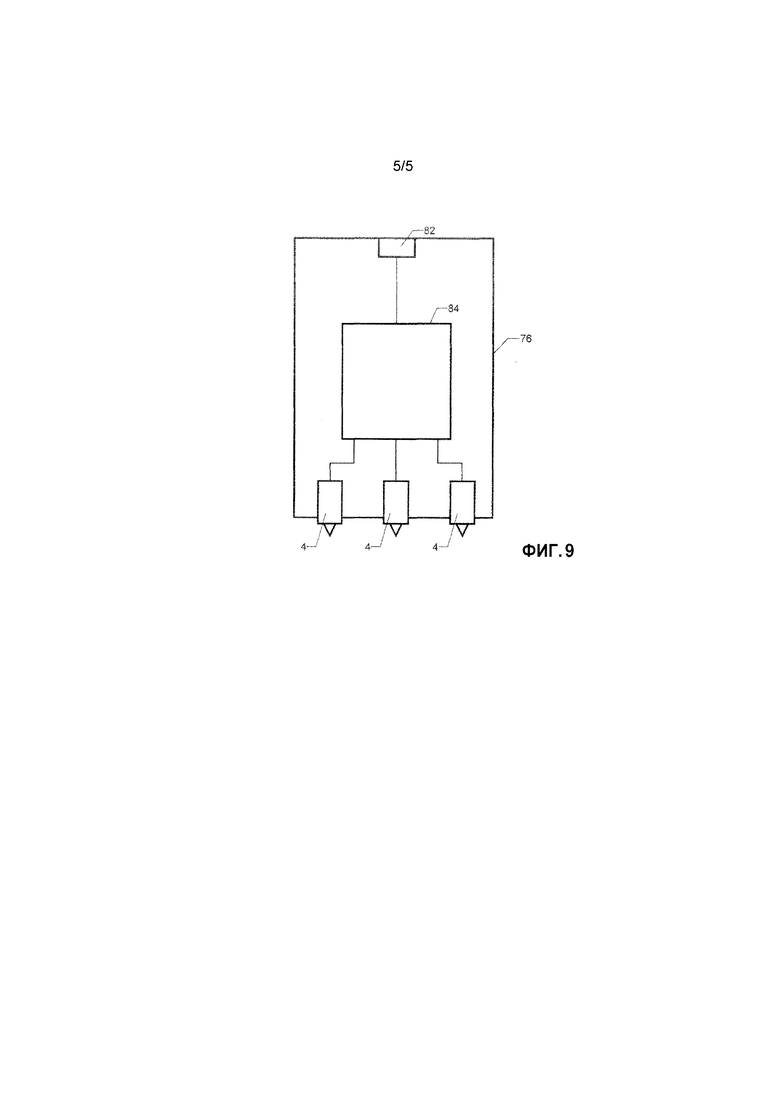
Фиг. 9 является блок-схемой канала устройства.
ВАРИАНТЫ осуществления изобретения
Конструкция корпуса:
Устройство 1, показанное на фиг. 1, может быть использовано для неразрушающего испытания компонента с помощью ультразвука.
Оно содержит корпус 2, например, по существу в форме прямоугольного параллелепипеда.
Корпус 2 имеет сторону 3 зондирования, которая лучше всего видна на фиг. 2. Сторона 3 зондирования предпочтительно плоская.
Множество двунаправленных ультразвуковых преобразователей 4 расположено на стороне 3 зондирования корпуса 2. Каждый преобразователь предпочтительно содержит пьезоэлектрический исполнительный элемент, снабженный наконечником 5 и упруго установленный в держателе 6, например, типа, описанного в WO 2016/029326.
Преобразователи 4 предпочтительно расположены в виде прямоугольной матрицы из рядов и столбцов. В настоящем варианте осуществления, эта матрица имеет три таких ряда и восемь столбцов. Преобразователи 4 в одном столбце могут, например, быть частью одного канала устройства, как это будет описано более подробно ниже.
Корпус 2 дополнительно содержит первую и вторую монтажную сторону 8, 9. Обе они являются поперечными, в частности, перпендикулярными к стороне 3 зондирования. Они продолжаются, так же, как сторона 3 зондирования, между первой торцевой стороной 10 и второй торцевой стороной 11 корпуса 2.
Наконец, корпус 2 содержит поверхность 14 пользовательского интерфейса, которая предпочтительно расположена противоположно стороне 3 зондирования. Как показано на фиг. 1, поверхность 14 пользовательского интерфейса может содержать элементы пользовательского интерфейса, такие как дисплей 15 и приводимые в действие пользователем элементы управления 16.
Как лучше всего видно на фиг. 1, механический переходник рукояток, в общем обозначенный 18, расположен на первой монтажной стороне 8. Переходник 18 рукояток содержит множество механических адаптеров 20, предпочтительно, по меньшей мере четыре из них. В варианте осуществления на фиг. 1, механические адаптеры 20 расположены в ряд.
Кроме того, электрический переходник 22 рукояток также расположен на монтажной стороне 8. Предпочтительно, электрический переходник 22 рукояток содержит по меньшей мере два разъема 24 с контактными элементами 25. В варианте осуществления на фиг. 1, разъемы 24 располагаются в ряд с механическими адаптерами 20.
В частности, может иметься четыре механических адаптера 20 в ряду и два электрических разъема 24. В этом случае, при нумерации механических адаптеров вдоль ряда как с первого по четвертый механические адаптеры, первый разъем 24 расположен между первым и вторым механическим адаптером, в то время как второй разъем 24 расположен между третьим и четвертым механическим адаптером, в этом случае электрические адаптеры могут контактировать не только с симметричной рукояткой, как показано, например, на фиг. 3, но также с боковой рукояткой, соединенной только с двумя крайними механическими адаптерами, как показано на фиг. 4 и 5 и описано более подробно ниже.
Как показано на фиг. 2, устройство дополнительно может включать в себя вспомогательный механический переходник 26, вновь сформированный, например, множеством механических адаптеров 20, расположенный на второй монтажной стороне 9.
Конструкция рукоятки:
Устройство предназначено для соединения с множеством различных рукояток, как показано на фиг. 3 и 4. Цель этих рукояток заключается в обеспечении захвата рукой для пользователя для удержания устройства во время выполнения измерения.
Фиг. 3 показывает первую рукоятку 30, которая предназначена, чтобы позволять пользователю держать устройство одной рукой.
Первая рукоятка 30 имеет симметричную конструкцию и включает в себя секцию 32 основания, а также секцию 34 захвата. Секция основания приспособлена и структурирована для соединения с по меньшей мере одним, в частности, по меньшей мере с двумя из адаптеров 20, в представленном варианте осуществления со всеми из адаптеров 20. Так, например, винты 36 могут располагаться в секции 32 основания, при этом каждый винт ввинчивается в один из адаптеров 20.
Секция 34 захвата предпочтительно установлена в центре секции 32 основания, чтобы иметь симметричное распределение сил.
Предпочтительно, секция 34 захвата содержит поверхность 38 захвата, предназначенную для обеспечения надежного захвата для пользователя.
Когда первая рукоятка 30 смонтирована на корпусе 2, секция 34 захвата расположена в центре между первой и второй торцевыми сторонами 10, 11 устройства 1 и выступает от корпуса 2. Предпочтительно, секция 34 захвата проходит перпендикулярно к линии, соединяющей первую и вторую торцевые поверхности 10, 11.
Первая рукоятка 30 дополнительно содержит приводимый в действие пользователем элемент 40 для управления по меньшей мере одной операцией устройства 1 через электрический переходник 22 рукоятки.
В то время как первая рукоятка 30 предназначена для удерживания устройства 1 с одной стороны, на фиг. 4 и 5 показаны две вторые рукоятки 44, которые оптимизированы, чтобы держать устройство двумя руками.
Каждая вторая рукоятка 44 имеет секцию 46 основания и секцию 48 захвата. Секция 46 основания приспособлена и структурирована для соединения по меньшей мере с одним, в частности, по меньшей мере с двумя из адаптеров 20, в представленном варианте осуществления с половиной адаптеров 20 механического переходника 18 рукояток устройства 1. Вновь, винты 36 могут быть расположены в секции 46 основания и могут ввинчиваться в механические адаптеры 20.
Как лучше всего можно видеть на фиг. 4 и 5, секция 48 захвата проходит в поперечном направлении, предпочтительно перпендикулярно к секции 46 основания, так что каждая вторая рукоятка имеет, по существу, L-образную форму.
Когда вторая рукоятка 44 смонтирована на корпусе 2, секция 48 захвата выходит за пределы первой или второй торцевой поверхности 10, 11 корпуса 2.
Как показано на фиг. 4, механический переходник 18 рукояток структурирован с возможностью позиционирования на нем одновременно двух из вторых рукояток 44, при этом их секции 48 захвата расположены на противоположных сторонах корпуса 2, то есть корпус 2 расположен между секциями 48 захвата двух вторых рукояток 44.
Каждая вторая рукоятка 44 предпочтительно также снабжена приводимым в действие пользователем элементом 40 управления для управления по меньшей мере одной операцией устройства 1.
В частности, приводимый в действие пользователем элемент 40 управления первой и/или второй рукоятки 30, 44 может управлять по меньшей мере одной из следующих функций устройства 1:
- Он может быть использован для запуска измерения.
- Он может быть использован для хранения измерений.
- Он может быть использован для выбора коэффициента усиления каналов, которые находятся в режиме приема.
- Он может быть использован для выбора другого параметра измерения, такого как режим фильтрации или форма импульса.
Фиг. 5 показывает, как разъем 50, сопряженный с разъемом 24 устройства 1, может быть расположен в секции 46 основания второй рукоятки 44. Он содержит ряд контактных элементов 51, которые вступают в контакт с контактными элементами 25 разъема 24, когда рукоятка смонтирована на устройстве. По меньшей мере один подобный разъем может быть также расположен в секции 32 основания первой рукоятки 30.
Пользователь сам решает, должно ли устройство работать с первой рукояткой 30 или вторыми рукоятками 44, в зависимости от предполагаемого режима использования. Рукоятки могут быть легко заменяемыми.
Другие типы рукояток могут быть включены в устройство. Например, рукоятка может также иметь секцию захвата, расположенную выше (то есть в пространстве, продолжающемся перпендикулярно наружу от) поверхности 14 пользовательского интерфейса.
Взаимное соединение устройств:
Как будет описано более подробно ниже, несколько из устройств 1 могут быть собраны в аппаратуру, чтобы увеличить количество измерительных каналов и/или расстояние между ними.
В этом случае каждое устройство 1 может удерживаться пользователем индивидуально. Однако в предпочтительном варианте осуществления, устройство содержит по меньшей мере один механический соединитель, структурированный и приспособленный для механического соединения по меньшей мере двух устройств 1 друг с другом. Это проиллюстрировано на фиг. 6.
В варианте осуществления на фиг. 6, механический соединитель 52 предназначен для прикрепления к механическим переходникам 18 рукояток двух устройств 1.
Предпочтительно, устройства 1 и механический соединитель 52 структурированы таким образом, что устройства 1 могут быть установлены так, что вторая торцевая поверхность 11 первого одного из устройств находится рядом с первой торцевой поверхностью 10 второго одного из устройств. Чтобы сделать это, механический соединитель 52 монтируется на первой части механических адаптеров 20 на первой монтажной стороне 8 корпусов 1 первого и второго устройства.
В варианте осуществления на фиг. 6, механический соединитель 52 смонтирован на половине механических адаптеров 20 механического переходника 18 рукояток каждого устройства 1.
В этой конфигурации, как показано на фиг. 6, две вторые рукоятки 44 могут быть смонтированы на второй части механических адаптеров 20 механического переходника 18 рукояток каждого устройства 1.
Для того чтобы усилить механическое соединение между двумя устройствами, второй механический соединитель, предпочтительно такой же конструкции, как механический соединитель 52, также может быть смонтирован на механических адаптерах 20 на второй монтажной стороне 9 каждого устройства.
Схема аппаратуры:
При работе нескольких устройств 1 в одной аппаратуре, должны иметься средства для синхронизации и центрального управления. С этой целью каждое устройство 1 предпочтительно снабжено интерфейсом одноранговых устройств, а также хост-интерфейсом. Оба этих интерфейса могут быть проводными или беспроводными.
В варианте осуществления, показанном на фиг. 1-6, интерфейсы одноранговых устройств оснащены штекерными разъемами 60 для формирования последовательного подключения всех устройств 1 аппаратуры.
Аналогичным образом, в варианте осуществления согласно фиг. 1-6, хост-интерфейс каждого устройства снабжен штекерным разъемом 62.
Возможная архитектура полной аппаратуры 64 с несколькими устройствами 1 показана на фиг. 7.
Аппаратура 64 содержит блок-хост 66, соединенный с одним из устройств 1 с помощью соединения 68 хоста, в то время как устройства 1 являются последовательно подключенными с помощью соединений 70 устройств.
Блок-хост 66 может быть, например, планшетным компьютером. Он, как правило, содержит дисплей 72 для отображения данных измерений и графический пользовательский интерфейса, а также пользовательские элементы управления, например, реализованные с использованием сенсорного устройства в качестве дисплея 72.
Блок-хост 66 образует центральный блок управления аппаратуры 64. Он способен принимать данные конфигурации от пользователя, например, спецификацию того, какие из каналов устройства должны излучать сигнал, и какие из них должны принимать сигналы. Он также может отправлять пользовательские вводы в виде команд на устройства 1, управлять ими соответствующим образом и принимать в ответ данные измерений. Он может обрабатывать эти данные измерений и отображать результаты на дисплее 72 в читаемой пользователем форме. Он может также содержать средство для хранения или дальнейшей обработки данных измерений.
Фиг. 8 показывает блок-схему одного устройства 1. Как уже упоминалось, каждое устройство содержит интерфейс 72 одноранговых устройств для установления связи по меньшей мере с одним другим устройством аппаратуры, например, в конфигурации последовательного подключения, как описано выше, с помощью соединения 70 устройств.
Он также содержит главный контроллер 73, который способен управлять другими устройствами аппаратуры.
Кроме того, каждое устройство содержит интерфейс 74 данных хоста для подключения главного контроллера 73 к блоку-хосту 66 через разъем 68 хоста.
Наконец, каждое устройство 1 содержит множество каналов 76, каждый из которых содержит по меньшей мере один из преобразователей 4. В варианте осуществления, показанном здесь, каждый канал 76 включает в себя три из преобразователей 4.
Функции этих компонентов, теперь будут описаны более подробно.
Главный контроллер 73 используется для управления функцией своего собственного устройства, а также функцией других устройств аппаратуры. Другими словами, если аппаратура 64 содержит N>1 устройств 1, она также содержит N главных контроллеров 73, каждый из которых теоретически способен управлять всеми другими устройствами. Однако только главный контроллер 73, устройство 1 которого соединено с блоком-хостом 66 через интерфейс 74 данных хоста, будет выполнять эту роль (тем самым действуя как ʺактивный главный контроллер ʺ), в то время как другие главные контроллеры 73 будут действовать только как локальные контроллеры для их соответствующих устройств.
В качестве альтернативы, или в дополнение к этому, активным главным контроллером может быть один контроллер в конце цепочки последовательного подключения устройств 1.
Главный контроллер 73 предпочтительно содержит схемы CPU, а также FPGA, взаимосвязанные, например, с помощью быстродействующей последовательной шины. FPGA используется для генерации всех цифровых сигналов, для которых требуется точная синхронизация, например, для генерации тактовых сигналов для аналоговых/цифровых преобразователей каналов. CPU, с другой стороны, управляет процедурой измерения и аспектами высокого уровня связи с другими устройствами, т.е. он отвечает за те задачи, где не требуется точная синхронизация.
Каждый из каналов 76 имеет режим передачи для передачи ультразвуковых сигналов, а также режим приема для приема ультразвуковых сигналов. Главный контроллер 73 способен локально управлять режимом каналов 76 на своем собственном устройстве. Кроме того, активный главный контроллер 73, например, тот, который подключен непосредственно к блоку-хосту 66, имеет возможность дистанционно управлять режимом каналов 76 на других устройствах 1 путем отправки соответствующих сигналов через интерфейс 72 одноранговых устройств.
Интерфейс 72 одноранговых устройств содержит канал 78 передачи данных для передачи информации, описывающей сигнал, подлежащий генерации в режиме передачи отдельных каналов, а также для описания сигнала, принимаемого в режиме приема по отдельным каналам.
Канал 78 передачи данных предпочтительно сконфигурирован, чтобы передавать один или более из следующих элементов информации:
- Информация о том, какие каналы находятся в ʺрежиме приемаʺ, т.е. сконфигурированы для приема сигналов, или в ʺрежиме отправкиʺ, то есть, сконфигурированы для передачи сигналов. Эта информация отправляется от активного главного контроллера 73 к отдельным каналам 76.
- Информация, описывающая сигнал, подлежащий генерации теми каналами, которые находятся в режиме передачи. Эта информация может включать в себя форму сигнала, амплитуду сигнала, фазу сигнала (или задержку сигнала), и она отправляется от активного главного контроллера 73 к отдельным каналам 76.
- Информация, описывающая сигнал, принимаемый каналами. Эта информация может содержать, например, серию дискретизированных амплитуд сигнала в течение определенного интервала времени, и она отправляется из отдельных каналов 76 на активный главный контроллер 73.
- Информация о параметрах приемника, таких, как коэффициент усиления усилителя, частота дискретизации и/или параметры фильтра.
Интерфейс 72 одноранговых устройств также содержит канал 80 запуска, приспособленный и структурированный, чтобы синхронизировать все устройства 1 по времени. Другими словами, даже если каждое устройство 1, как правило, имеет свой собственный тактовый генератор, запускающий сигнал может отправляться от активного главного контроллера на все устройства, чтобы установить общую временную привязку на всех из них, тем самым позволяя отправлять сигналы, которые являются взаимно синхронизированы, и принимать данные сигнала с общей временной базой. Канал 80 запуска может быть, например, простой сигнальной линией, которая переключает свой уровень, когда должно начаться измерение, как только вся необходимая информация установки была распространена через канал 78 передачи данных.
Как уже упоминалось выше, канал 78 передачи данных предпочтительно образует соединение не в реальном времени, позволяя тем самым осуществлять передачу данных асинхронно между устройствами 1. Это особенно полезно, когда большое количество данных измерений должно быть передано от отдельных устройств 1 к активному главному контроллеру.
Для того чтобы быть в состоянии брать выборки, в реальном времени, данных измерений, описывающих сигналы, принимаемые из каналов 76, при передаче их позже, не в реальном времени, на активный главный контроллер, каждый главный контроллер предпочтительно содержит память 75, приспособленную для буферизации данных измерений из каналов 76.
Для того чтобы увеличить пропускную способность передачи данных, как показано на фиг. 8, каждый канал 76 имеет свое собственное соединение 77 передачи данных к своему локальному главному контроллеру 73, тем самым увеличивая скорость передачи данных между каналами 76 и главным контроллером 73 по сравнению с осуществлением связи через общую шину данных, где каналы 76 должны адресоваться и опрашиваться последовательно.
Фиг. 9, наконец, показывает блок-схему одного канала 76. Он содержит интерфейс 82 канала для взаимодействия с локальным главным контроллером 73 того же устройства. Электронные средства 84 драйвера (возбудителя) предназначены для генерирования электрических сигналов, чтобы активировать преобразователи 4 канала, а также для приема и усиления сигналов, принятых преобразователями 4. Электронные средства 84 драйвера могут содержать аналого-цифровой, а также цифро-аналоговый преобразователи, в этом случае передача данных через интерфейс 82 канала на локальный главный контроллер 73 может быть цифровой.
Примечания:
Переходник 18 рукояток может также использоваться для присоединения компонентов иных, чем рукоятки. В частности, переходник 18 рукояток может быть использован, чтобы смонтировать устройство 1 на робот-манипулятор, который автоматически перемещает устройство в нужные местоположения измерения на образце, подлежащем исследованию. В этом случае, механические адаптеры 20 используются, чтобы устанавливать механическое соединение с манипулятором, в то время как электрический переходник 22 рукояток может устанавливать электронное соединение, позволяющее автоматически запускать измерение.
Адаптер 20 может, например, содержать выступы, продолжающиеся на монтажной стороне 8, а секции основания рукояток могут включать в себя углубления для позиционирования этих выступов, или наоборот, в результате чего образуется сопряженное соединение между секцией основания и адаптерами.
Устройство отличается высокой масштабируемостью. Количество устройств 1 в аппаратуре может быть большим, если должно выполняться комплексное измерение.
Устройства 1 аппаратуры могут быть механически связаны друг с другом, например, как показано на фиг. 6, или они могут быть отдельными друг от друга, только соединенными друг с другом электронным способом через интерфейсы 72 одноранговых устройств.
Устройства 1 может быть использованы для измерения отраженных, а также переданных сигналов.
Такие режимы, как ʺрежим передачиʺ и ʺрежим приемаʺ не являются взаимоисключающими. В частности, канал может быть сконфигурирован, чтобы находиться в режиме передачи, но в то же время в режиме приема, например, чтобы принимать эхо-сигнал после отправки импульса.
Устройство особенно подходит для создания фазированной решетки, где каналы генерируют сигналы, взаимно сдвинутые по фазе. В качестве альтернативы, или в дополнение к этому, устройство может работать в режиме SAFT, где один канал находится в режиме передачи, а остальные находятся в режиме приема, при этом главный контроллер изменяет канал, который находится в режиме передачи, между последовательными измерениями.
Индивидуальные измерения могут запускаться с помощью активного главного контроллера и/или с помощью блока-хоста 66. Измерения могут выполняться непрерывно, чтобы получать в реальном времени изображение на дисплее 72 блока-хоста 66. В этом случае отдельные измерения могут сохраняться, например, путем задействования пользователем элемента 40 на одной из рукояток.
Каждое устройство 1 может иметь свой собственный источник питания, например аккумуляторную батарею.
В то время как показаны и описаны предпочтительные в настоящее время варианты осуществления изобретения, следует отчетливо понимать, что изобретение не ограничено ими, но может быть воплощено и реализовано различным образом в пределах объема нижеследующей формулы изобретения.
Использование: для испытания компонента с помощью ультразвука. Сущность изобретения заключается в том, что устройство для испытания компонента с помощью ультразвука содержит корпус, множество двунаправленных ультразвуковых преобразователей, расположенных на стороне зондирования упомянутого корпуса, электронные средства драйвера, расположенные в корпусе, для задействования упомянутых преобразователей, механический переходник рукояток, расположенный на упомянутом корпусе для монтажа рукоятки, и набор рукояток различной формы, причем каждая рукоятка структурирована, чтобы монтироваться на упомянутом механическом переходнике рукояток. Технический результат: обеспечение возможности свободного конфигурирования измерений в соответствии с потребностями пользователя. 4 н. и 18 з.п. ф-лы, 9 ил.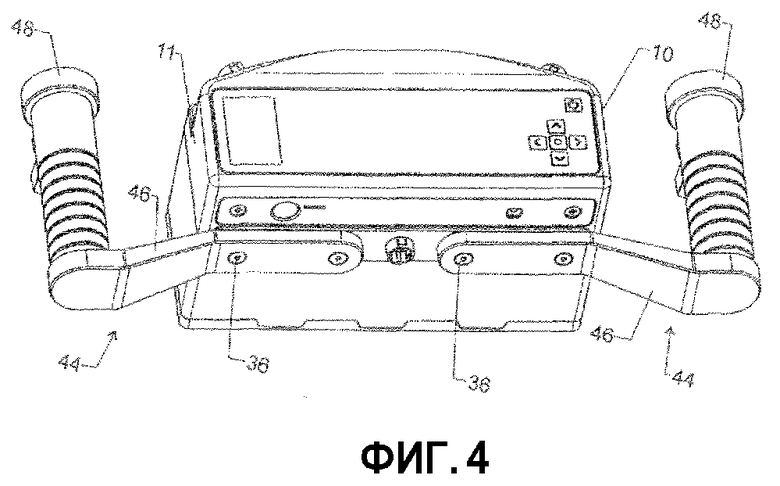
1. Устройство для испытания компонента с помощью ультразвука, содержащее
корпус (2),
множество двунаправленных ультразвуковых преобразователей (4), расположенных на стороне (3) зондирования упомянутого корпуса (2),
электронные средства (84) драйвера, расположенные в корпусе (2), для задействования упомянутых преобразователей (4),
механический переходник (18) рукояток, расположенный на упомянутом корпусе (2) для монтажа рукоятки (30, 44), и
набор рукояток (30, 44) различной формы, причем каждая рукоятка структурирована, чтобы монтироваться на упомянутом механическом переходнике (18) рукояток.
2. Устройство по п. 1, причем упомянутый механический переходник (18) рукояток структурирован с возможностью позиционирования на нем одной, а также двух из упомянутых рукояток (30, 44) одновременно.
3. Устройство по любому из предыдущих пунктов, причем механический переходник (18) рукояток содержит множество механических адаптеров (20), расположенных на первой монтажной стороне (8) упомянутого корпуса (2), причем упомянутая первая монтажная сторона (8) является поперечной, в частности перпендикулярной, к упомянутой стороне (3) зондирования и проходит между первой и второй торцевыми сторонами (10, 11) корпуса (2).
4. Устройство по п. 3, содержащее по меньшей мере одну первую рукоятку (30), имеющую секцию (32) основания, приспособленную и структурированную для соединения с по меньшей мере одним из упомянутых адаптеров (20), а также секцию (34) захвата, чтобы захватываться пользователем, причем, когда упомянутая первая рукоятка (30) смонтирована на упомянутом корпусе (2), упомянутая секция (34) захвата расположена в центре между упомянутой первой и упомянутой второй торцевыми сторонами (10, 11) и продолжается от упомянутого корпуса (2).
5. Устройство по п. 4, причем упомянутая секция (32) основания приспособлена и структурирована, чтобы соединяться по меньшей мере с двумя из упомянутых адаптеров (20) при монтаже на упомянутом корпусе (2), и причем упомянутая секция (34) захвата монтируется в центре упомянутой секции (32) основания.
6. Устройство по любому из пп. 3-5, содержащее по меньшей мере одну вторую рукоятку (44), имеющую секцию (46) основания, приспособленную и структурированную, чтобы соединяться по меньшей мере с одним из упомянутых адаптеров (20), а также секцию (48) захвата, чтобы захватываться пользователем, причем, когда упомянутая вторая рукоятка (44) смонтирована на упомянутом корпусе (2), упомянутая секция (48) захвата выступает над первой или второй торцевой стороной (10, 11) корпуса (2).
7. Устройство по п. 6, содержащее по меньшей мере две из упомянутых вторых рукояток (44), причем упомянутый механический переходник (18) рукояток приспособлен и структурирован с возможностью позиционирования в нем двух из упомянутых вторых рукояток (44) одновременно, причем секции (48) захвата упомянутых вторых рукояток (44) расположены на противоположных сторонах упомянутого корпуса (2).
8. Устройство по любому из пп. 6 или 7, причем секция (48) захвата упомянутой второй рукоятки (44) проходит поперечно, в частности перпендикулярно, к секции (46) основания упомянутой второй рукоятки (44).
9. Устройство по любому из предыдущих пунктов, дополнительно содержащее электрический переходник (22) рукояток, расположенный на упомянутом корпусе (2) для обеспечения электрического соединения по меньшей мере с одной из упомянутых рукояток (30, 44}, смонтированных на упомянутом механическом переходнике (18) рукояток, и причем по меньшей мере часть упомянутых рукояток (30, 44) содержит приводимый в действие пользователем элемент (40) для управления устройством через упомянутый электрический переходник (22) рукояток.
10. Аппаратура для испытания компонента с помощью ультразвука, содержащая несколько устройств (1) по любому из предыдущих пунктов и дополнительно содержащая по меньшей мере один механический соединитель (52), причем упомянутый механический соединитель (52) приспособлен и структурирован, чтобы механически соединять по меньшей мере два из упомянутых устройств (1) друг с другом посредством прикрепления к упомянутым механическим переходникам (18) рукояток двух устройств (1).
11. Аппаратура по п. 10 с устройствами (1) по п. 3, причем упомянутые устройства (1) и упомянутый механический соединитель (52) структурированы так, что упомянутые устройства (1) могут быть смонтированы так, что вторая торцевая сторона (11) первого одного из упомянутых устройств (1) является смежной с первой торцевой стороной (10) второго одного из упомянутых устройств (1) путем монтажа упомянутого механического соединителя (52) на первой части упомянутых механических адаптеров (20) на первой монтажной стороне (8) корпуса (2) первого и второго устройств (1).
12. Аппаратура по п. 11 с устройствами (1) по п. 6, причем, когда упомянутые первое и второе устройства (1) установлены с торцевыми сторонами (10, 11), смежными друг с другом, и упомянутый механический соединитель (52) смонтирован на упомянутой первой части упомянутых механических адаптеров (20), две из упомянутых вторых рукояток (44) могут быть смонтированы на второй части упомянутых механических адаптеров (20).
13. Аппаратура, особенно по любому из пп. 10-12, для испытания компонента с помощью ультразвука, содержащая множество идентичных устройств (1), причем каждое устройство содержит
корпус (2),
множество идентичных двунаправленных ультразвуковых преобразователей (4), расположенных в или на упомянутом корпусе (2),
электронные средства (84) драйвера, расположенные в упомянутом корпусе (2), для задействования упомянутых преобразователей (4),
интерфейс (72) одноранговых устройств для установления связи по меньшей мере с одним другим устройством из упомянутых устройств (1), и
главный контроллер (73), приспособленный и структурированный, чтобы управлять упомянутым по меньшей мере одним другим устройством через упомянутый интерфейс (72) одноранговых устройств.
14. Аппаратура по п. 13, причем каждое устройство содержит несколько каналов (76), каждый канал (76) включает в себя по меньшей мере один из упомянутых преобразователей (4), в частности несколько из упомянутых преобразователей (4), и имеет режим передачи для передачи ультразвуковых сигналов, а также режим приема для приема ультразвуковых сигналов, причем главный контроллер (73) каждого устройства приспособлен и структурирован, чтобы
локально и индивидуально управлять режимом каналов (76) на том же устройстве, а также
дистанционно и индивидуально управлять режимом каналов (76) на упомянутом по меньшей мере одном другом устройстве.
15. Аппаратура по п. 14, причем упомянутый интерфейс (72) одноранговых устройств содержит канал (78) передачи данных, приспособленный и структурированный для передачи информации, описывающей сигнал, подлежащий генерации в упомянутом режиме передачи, и/или описывающей сигнал, принимаемый в упомянутом режиме приема.
16. Аппаратура по п. 15, причем упомянутый интерфейс (72) одноранговых устройств содержит канал (80) запуска, приспособленный и структурированный, чтобы синхронизировать упомянутые устройства (1) в реальном времени, причем упомянутый канал (78) передачи данных формирует соединение не в реальном времени.
17. Аппаратура по любому из пп. 14-16, причем упомянутый главный контроллер содержит память (75) для буферизации данных измерений, описывающих сигнал, принятый упомянутыми каналами (76).
18. Аппаратура по любому из пп. 13-17,
причем упомянутая аппаратура дополнительно содержит блок-хост (66) для управления упомянутым устройством, причем упомянутый блок-хост (66) является отдельным от упомянутых устройств (1),
причем каждое устройство дополнительно содержит интерфейс (74) данных хоста, приспособленный и структурированный, чтобы соединять главный контроллер (73) упомянутого устройства с упомянутым блоком-хостом (66), и
причем упомянутый блок-хост приспособлен и структурирован, чтобы соединяться с главным контроллером (73) первого одного из упомянутых устройств, чтобы управлять всеми из упомянутых устройств через главный контроллер (73) первого устройства.
19. Аппаратура по пп. 14 и 18, причем упомянутый интерфейс (74) передачи данных хоста приспособлен и сконструирован, чтобы передавать информацию, описывающую сигнал, подлежащий генерации в упомянутом режиме передачи, и/или описывающую сигнал, принимаемый в упомянутом режиме приема по отдельности для каждого из каналов (76) аппаратуры.
20. Аппаратура по п. 14 и по любому из пп. 18 или 19, причем упомянутый интерфейс (74) данных хоста приспособлен и структурирован, чтобы индивидуально управлять режимом всех каналов (76) упомянутой аппаратуры.
21. Применение устройства по любому из пп. 1-9 для зондирования бетона.
22. Применение аппаратуры по любому из пп. 11-20 для зондирования бетона.
| АНКЕРНАЯ ПОДАТЛИВАЯ КРЕПЬ | 1993 |
|
RU2044887C1 |
| EP 2901936 A1, 05.08.2015 | |||
| US 2009326380 A1, 31.12.2009 | |||
| US 2015182197 A1, 02.07.2015 | |||
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2492465C2 |
| ПОРТАТИВНОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ МЕТАЛЛУРГИЧЕСКОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 2008 |
|
RU2464557C2 |

