Область техники, к которой относится изобретение
Настоящее изобретение относится к сканирующему устройству. Более конкретно, настоящее изобретение относится к ультразвуковому контрольно-испытательному (ultrasonic testing, UT) сканирующему устройству, которое предназначено для неразрушающего контроля качества металлических и композитных конструкций и т.п.
Уровень техники
Анализ невидимых участков материалов, в частности, внутренних частей компонентов, сварных соединений и композитных материалов можно производить при помощи ультразвукового контроля. Этот тип методов неразрушающего контроля (nondestructive testing, NDT) использует отражение акустических волн для обнаружения дефектов и других особенностей, которые иначе было бы очень сложно обнаружить без разрушения соответствующего компонента. Ультразвуковой контроль является широко распространенным способом в аэрокосмической технике для контроля целостности материалов при изготовлении и техническом обслуживании.
Сканирующие устройства обычно бывают портативного типа (т.е. более пригодные для сканирования в процессе технического обслуживания) или не портативного типа (в частности, для производственных целей).
Характерной особенностью ультразвукового контроля является необходимость присутствия вещества, обеспечивающего акустический контакт, которое способствует передаче ультразвуковой энергии в исследуемый образец вследствие большого расхождения между акустическим импедансом воздуха и твердых тел (в частности, исследуемого образца). Если вещество, обеспечивающее акустический контакт, не используется, возникает отражение акустических волн и ухудшение качества сканирования. Вещества, обеспечивающие акустический контакт, как правило, представляют собой воду, гель или деформируемое твердое тело.
Традиционно применение ультразвукового контроля ограничивает скорость проведения анализа, поскольку эту операцию приходится выполнять отдельно в каждой точке. Определенные усовершенствования привели к разработке матричного сканирования или "кистевого" сканирования, которое позволяет производить сплошное сканирование поверхности для получения двухмерного изображения соответствующего участка исследуемого компонента. Однако такое оборудование является громоздким, его применение ограничивается производственными условиями (в отличие от условий технического обслуживания), и оно не является портативным.
Вопрос портативности решала разработка системы RapidScan, представленной на рынке компанией NDT Solutions Ltd. Эта система использует корпус, на котором установлен с возможностью вращения резиновый барабан, заполненный водой. Ультразвуковая матрица установлена на оси, а вода, содержащаяся в деформируемом резиновом барабане, действует в качестве вещества, обеспечивающего акустический контакт.
Система RapidScan содержит также кодовый датчик угла поворота, установленный на корпусе вблизи барабана. Корпус имеет ручку, проходящую в направлении перемещения системы RapidScan.
При применении корпус держат за рукоятку вблизи контролируемого объекта таким образом, чтобы барабан и датчик угла поворота находились в контакте с указанным контролируемым объектом, и перемещают таким образом, чтобы барабан и датчик угла поворота вращались. При этом происходит сканирование при помощи матрицы. Сканированный сигнал поступает от матрицы на расположенный вблизи компьютер для проведения анализа. Одновременно с этим датчик угла поворота передает на компьютер сигнал, который позволяет определить позицию сканирования и, следовательно, местоположение каких-либо обнаруженных особенностей структуры.
Данная система имеет различные недостатки. Во-первых, требование одновременного контакта барабана и датчика угла поворота означает, что система не может легко следовать за существенными изменениями рельефа контролируемого объекта. Устройство может оказаться "заземленным" (т.е., часть корпуса между датчиком угла поворота и барабаном может касаться контролируемого объекта). Альтернативно этому барабан или датчик угла поворота может прервать контакт с поверхностью, что приведет к потере полученных результатов или к потере данных, связанных с пройденным участком перемещения.
Кроме того, ориентация корпуса, и, следовательно, рукоятка зафиксирована по отношению к поверхности контролируемого объекта, поэтому положение руки пользователя является стесненным. В результате, в случае контролируемых объектов с особенно неровной поверхностью пользователю приходится несколько раз изменять положение руки по отношению к плечу/телу. Эти различные положения также могут быть неудобными для пользователя.
Кроме того, часто является желательным использовать ультразвуковые матрицы с различной частотой. Поэтому для выполнения такой функции необходимо иметь несколько систем, каждая из которых содержит различные матрицы.
Далее, барабан устанавливается непосредственно на корпус. Это ограничивает скорость, с которой матрица может обследовать контролируемый объект, поскольку пользователь должен тщательно следить за тем, чтобы матрица не отходила от поверхности контролируемого объекта, например, на острых кромках рельефа поверхности или на дефектах, которые барабан может "перепрыгивать". Если барабан теряет контакт с контролируемым объектом, влияние вещества, обеспечивающего акустический контакт, утрачивается, и эффективность сканирующего устройства значительно уменьшается.
Кроме того, жесткое монтажное соединение между барабаном и корпусом означает, что все усилие, передаваемое между контролируемым объектом и барабаном, передается на руку пользователя, который может испытывать неприятные ощущения в случае удара или многократной нагрузки.
Раскрытие изобретения
Задачей настоящего изобретения является устранение или, по меньшей мере, уменьшение по меньшей мере одного из вышеуказанных недостатков.
Согласно первому аспекту изобретения обеспечивается портативное сканирующее устройство, содержащее корпус и блок сканирования, содержащий ультразвуковую сканирующую матрицу и вращающийся компонент, установленный с возможностью поворота относительно корпуса, при этом вращающийся компонент содержит вещество, обеспечивающее акустический контакт, и имеет периферическую контактную поверхность для контактирования с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта, таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, приводит к повороту вращающегося компонента, а также кодовый датчик положения, содержащий датчик перемещения, который предназначен для измерения перемещения вращающегося компонента.
Таким образом, датчик не требует какой-либо связи с поверхностью контролируемого объекта, которая могла бы усложнять его перемещение на определенных участках.
Согласно второму аспекту изобретения обеспечивается портативное сканирующее устройство, содержащее корпус и блок сканирования, содержащий ультразвуковую сканирующую матрицу и вращающийся компонент, установленный с возможностью поворота относительно корпуса, при этом вращающийся компонент содержит вещество, обеспечивающее акустический контакт, и имеет периферическую контактную поверхность для контактирования с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта, таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, приводит к повороту вращающегося компонента, при этом вращающийся компонент подпружинен и может поступательно перемещаться относительно корпуса.
В этой связи обеспечивается определенная форма подвески, в которой положение вращающегося компонента может адаптироваться для того, чтобы следовать изменениям поверхности, при этом пользователь не должен постоянно изменять положение своей руки, в которой находится сканирующее устройство.
Согласно третьему аспекту изобретения обеспечивается портативное сканирующее устройство, содержащее корпус и блок сканирования, содержащий ультразвуковую сканирующую матрицу и вращающийся компонент, установленный с возможностью поворота относительно корпуса, при этом вращающийся компонент содержит вещество, обеспечивающее акустический контакт, и имеет периферическую контактную поверхность для контактирования с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта, таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, приводит к повороту вращающегося компонента, и при этом блок сканирования установлен на корпусе с возможностью съема при помощи быстроразъемного соединения.
В этой связи требуется только один корпус сканирующего устройства, а блоки сканирования можно легко заменять в зависимости от требований выполняемой задачи.
Согласно четвертому аспекту изобретения обеспечивается портативное сканирующее устройство, содержащее корпус и блок сканирования, содержащий ультразвуковую сканирующую матрицу и вращающийся компонент, установленный с возможностью поворота относительно корпуса, при этом вращающийся компонент содержит вещество, обеспечивающее акустический контакт, и имеет периферическую контактную поверхность для контактирования с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта, таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, приводит к повороту вращающегося компонента, при этом матрица установлена с возможностью поворота относительно корпуса.
В этой связи рукоятку можно перемещать относительно матрицы для того, чтобы обеспечить удобство использования или применение матрицы в условиях ограниченного пространства.
Краткое описание чертежей
Далее приведено описание вариантов осуществления настоящего изобретения со ссылками на прилагаемые чертежи, на которых представлены:
фигура 1А-1С - вид сбоку прототипа сканирующего устройства в первой позиции,
фигура 2А - вид в перспективе первого варианта осуществления сканирующего устройства согласно настоящему изобретению,
фигура 2B - схематический вид части сканирующего устройства с фигуры 1 в первом состоянии,
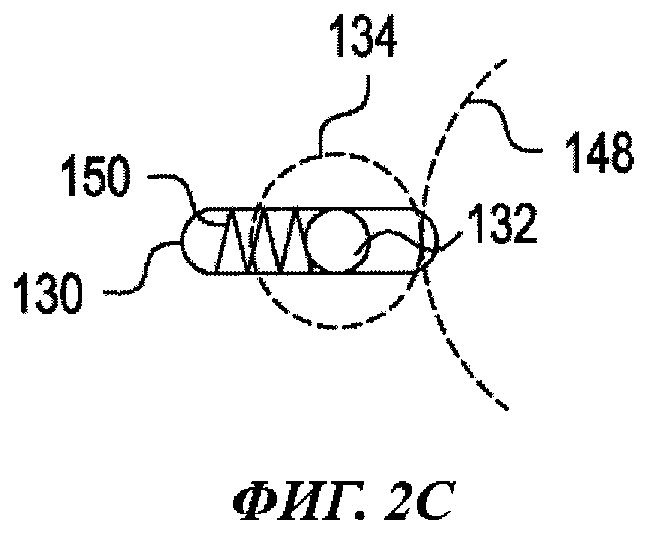
фигура 2С - схематический вид части сканирующего устройства с фигуры 1 во втором состоянии,
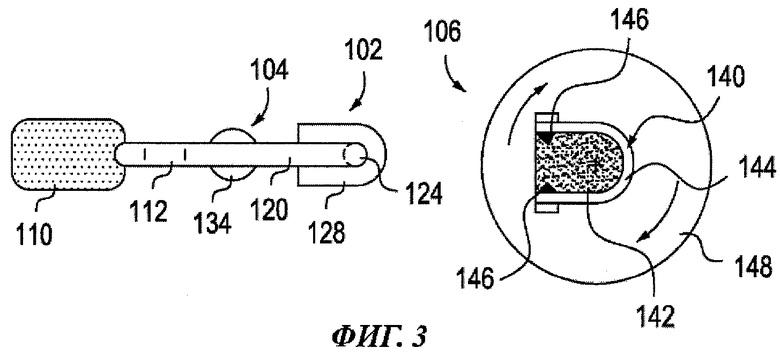
фигура 3 - схематический вид части сканирующего устройства с фигуры 1,
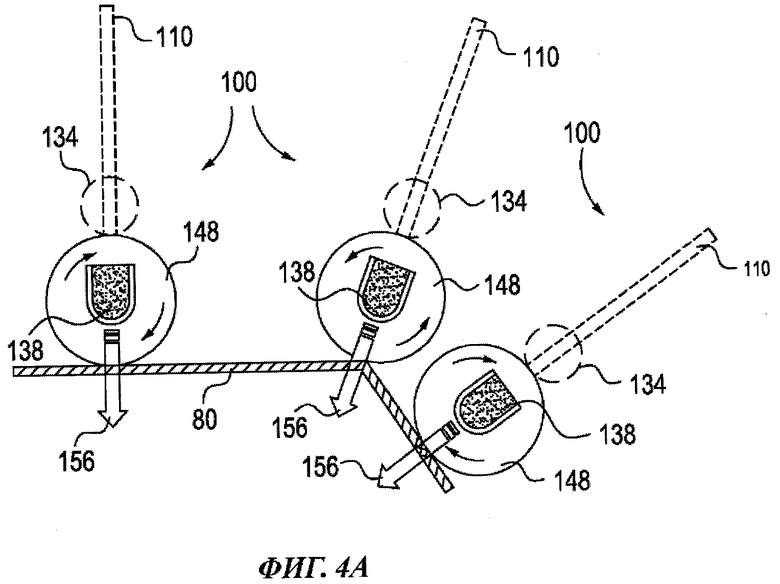
фигура 4А - схематический вид сканирующего устройства с фигуры 1 во время эксплуатации,
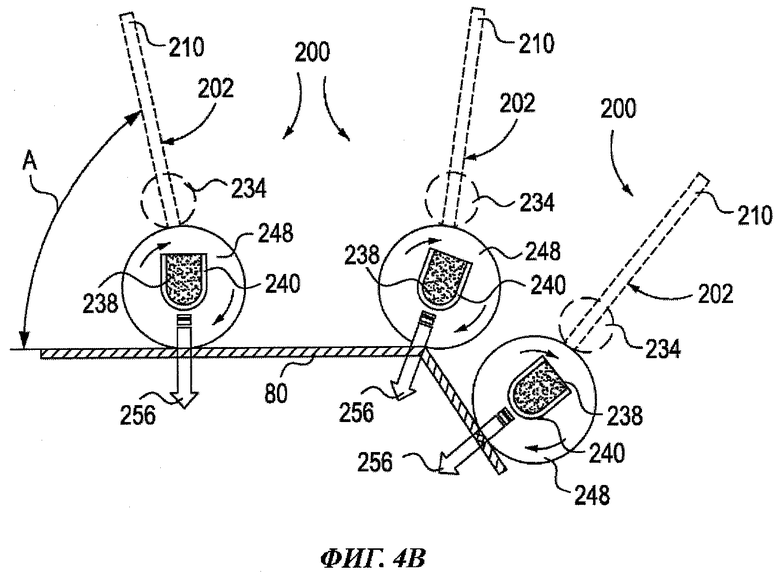
фигура 4B - схематический вид второго варианта осуществления сканирующего устройства во время эксплуатации,
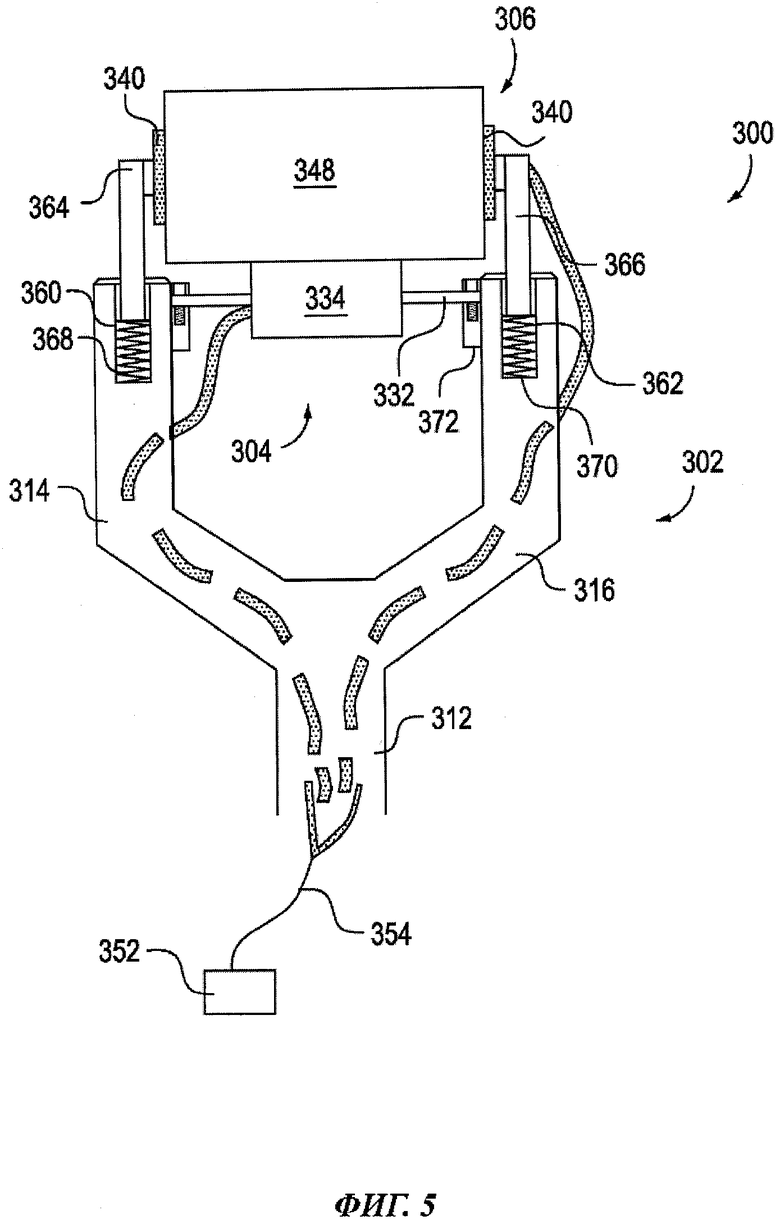
фигура 5 - вид сверху в частичном разрезе третьего варианта осуществления сканирующего устройства согласно настоящему изобретению,
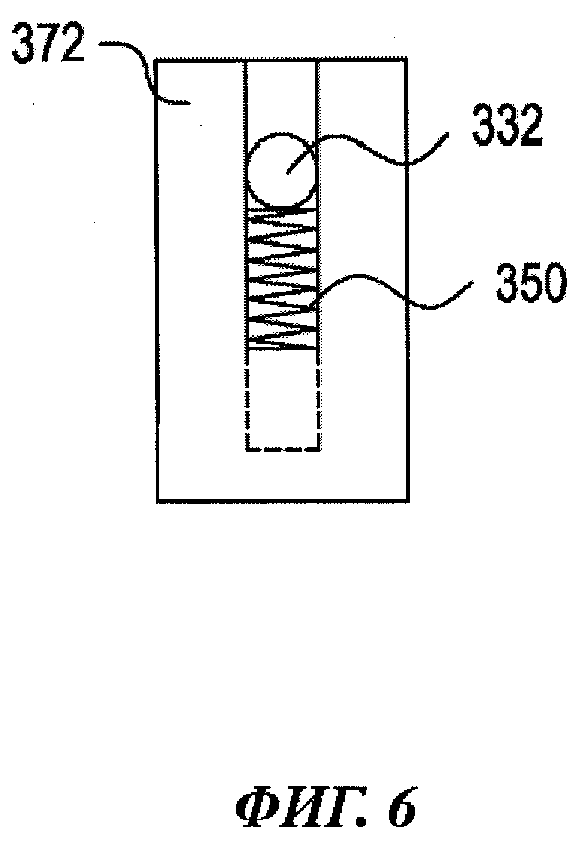
фигура 6 - схематический вид части сканирующего устройства с фигуры 4,
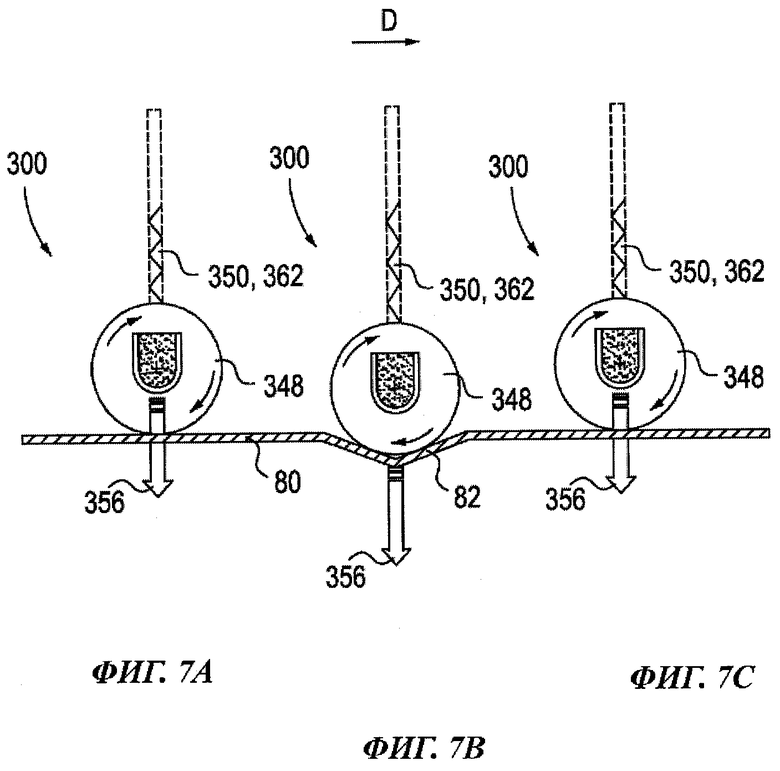
фигуры 7А-7С - схематический вид сбоку сканирующего устройства с фигуры 4 во время эксплуатации,
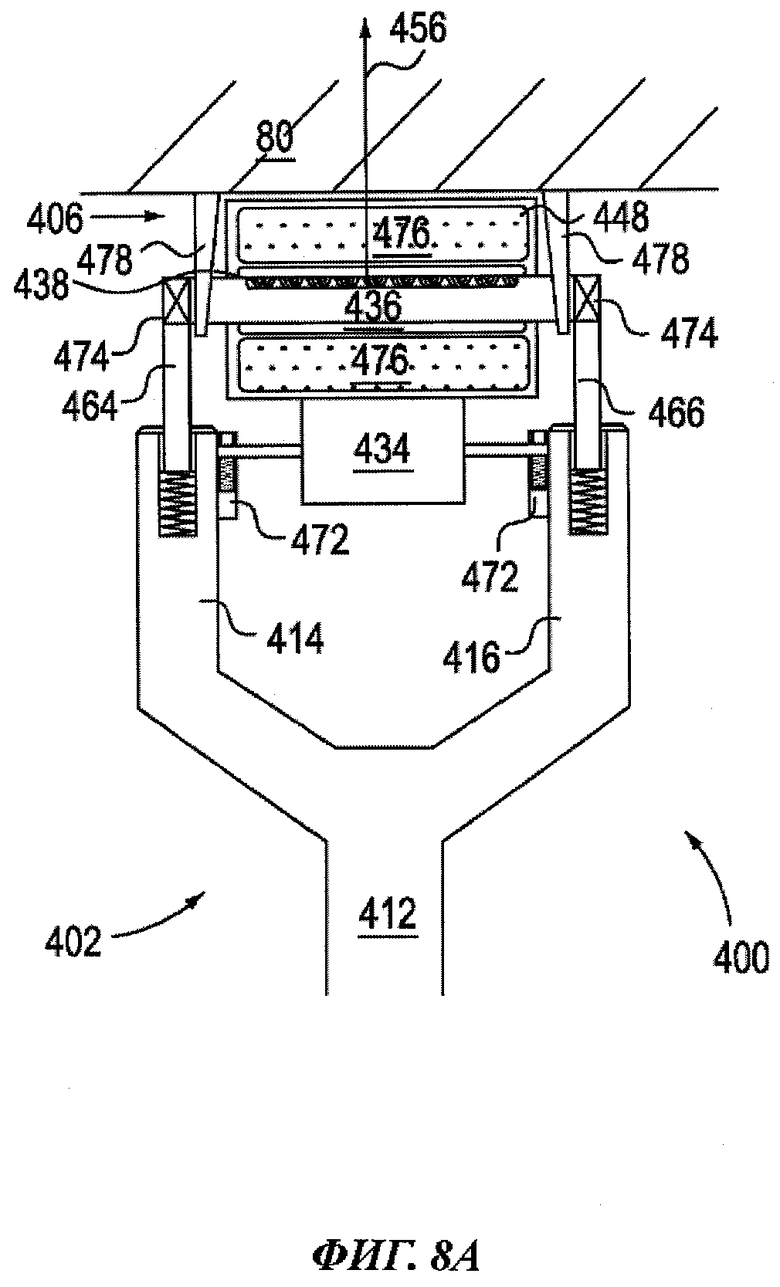
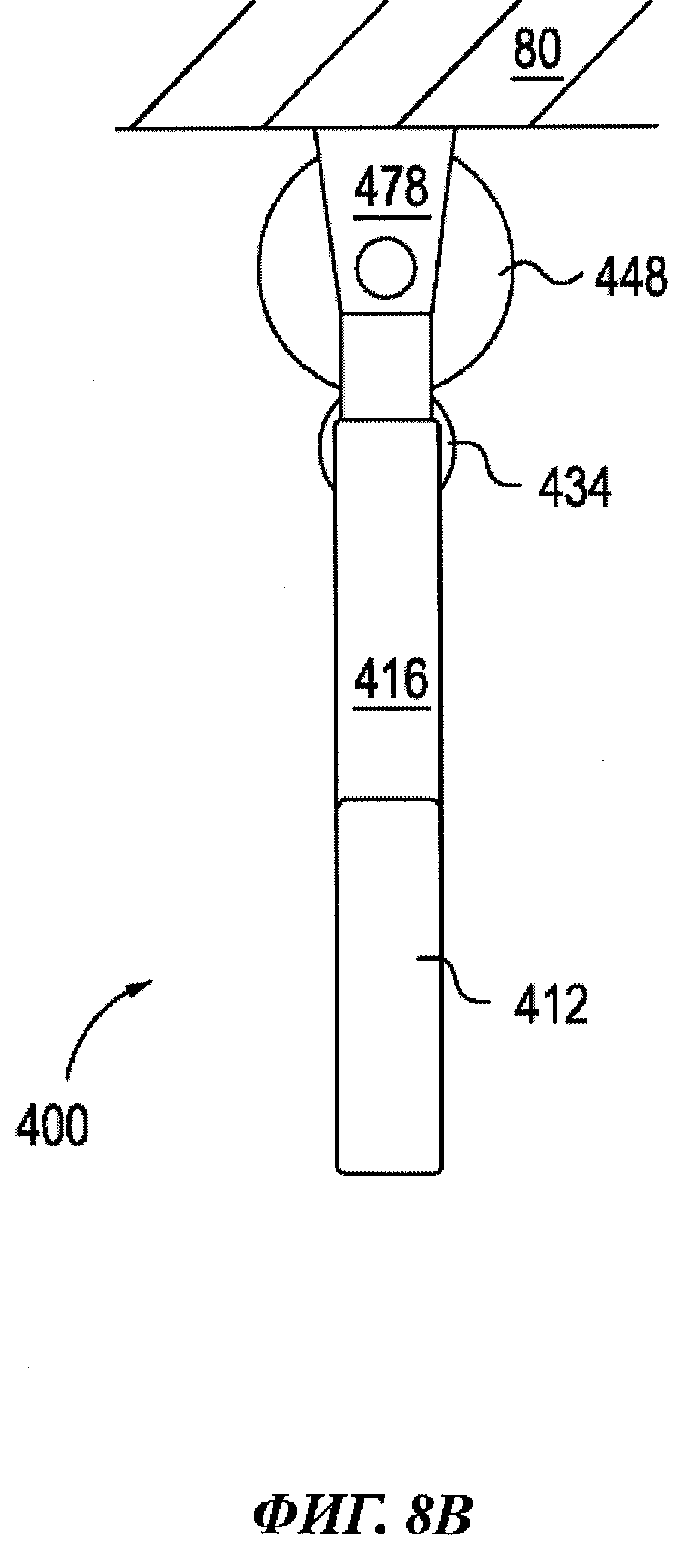
фигура 8А - вид спереди в частичном разрезе третьего варианта осуществления сканирующего устройства согласно настоящему изобретению,
фигура 8B - вид сбоку сканирующего устройства с фигуры 8А, и
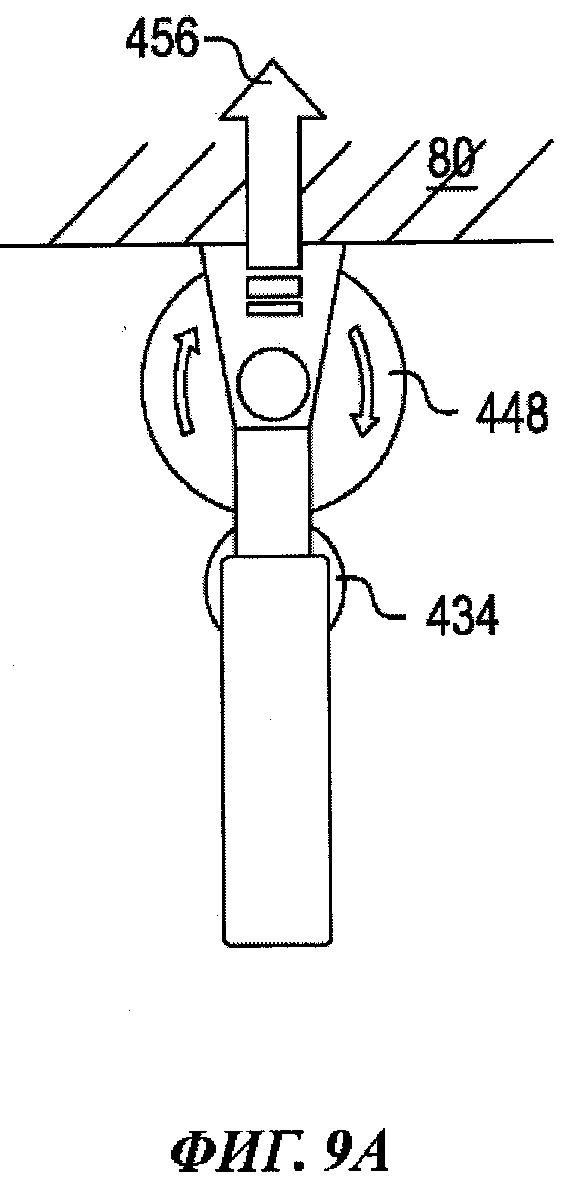
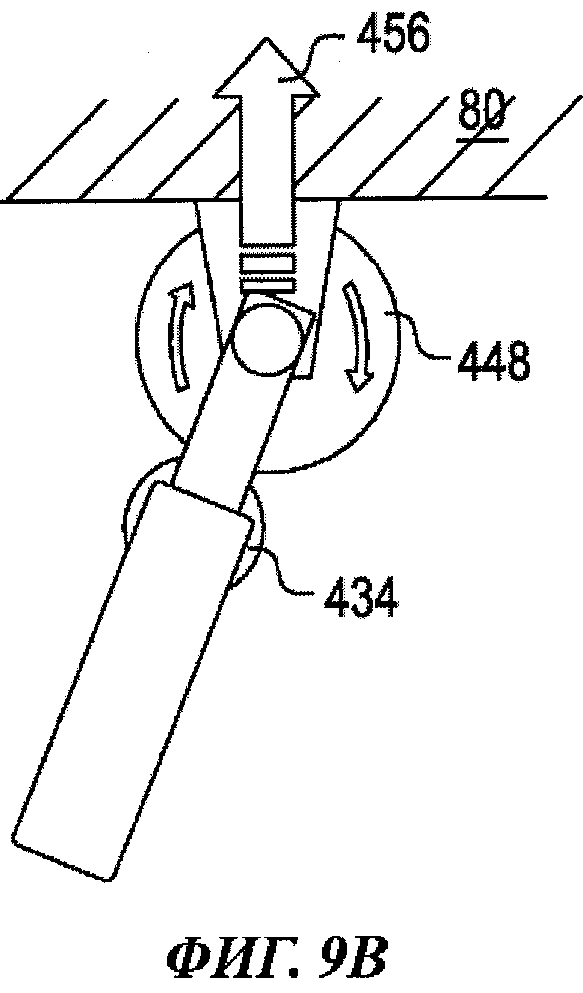
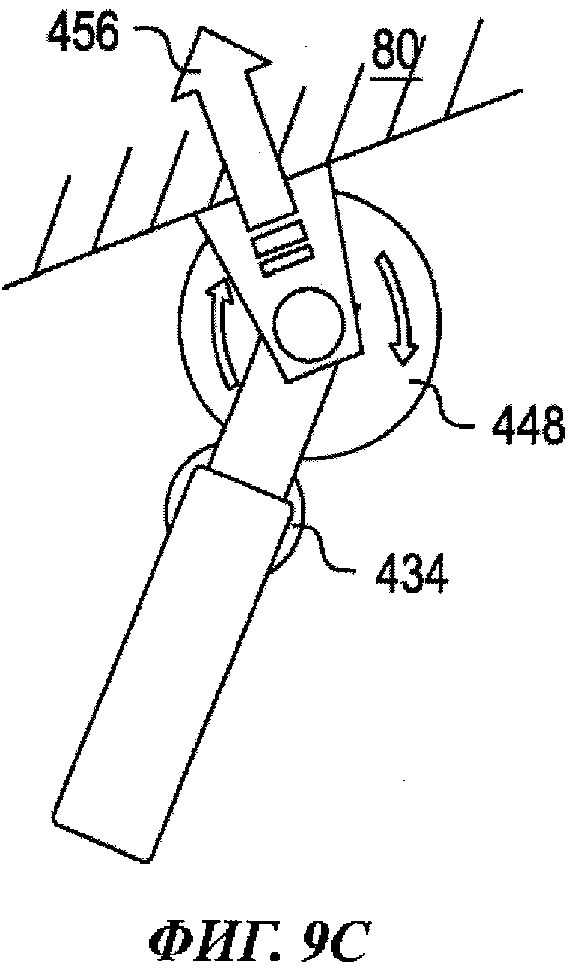
фигуры 9А-9С - схематические виды ручного сканирующего устройства с фигуры 8А в различных конфигурациях.
Осуществление изобретения
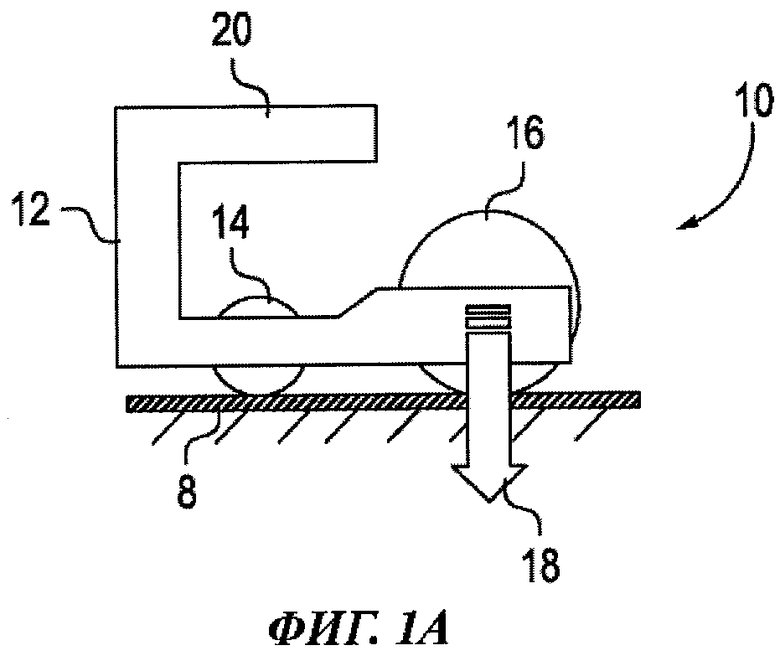
На фигурах 1А-1С схематически показан прототип сканирующего устройства 10, которое содержит корпус 12, диск 14 кодового датчика положения и барабан 16. Диск 14 кодового датчика положения и барабан 16 контактируют с поверхностью контролируемого объекта 8. Сканирующее устройство 10 угла поворота содержит также матрицу (не показана), неподвижно закрепленную на корпусе 12, и, по существу, совпадающую с осью вращения барабана. Матрица имеет направление 18, сканирования, в котором она излучает ультразвуковые волны к контролируемому объекту 8 и принимает ультразвуковые волны от контролируемого объекта 8. Направление 18 сканирования является фиксированным по отношению к корпусу 12. Корпус имеет рукоятку 20, за которую ее можно перемещать относительно контролируемого объекта 8 вместе с диском 14 кодового датчика положения и барабаном 16, который может поворачиваться по отношению к корпусу.
Для того чтобы сканирующее устройство 10 обеспечивало удовлетворительное сканирование контролируемого объекта 8, направление 18 сканирования должно быть перпендикулярным к поверхности контролируемого объекта 8. Это имеет место на фигуре 1А, где контролируемый объект 8 имеет плоскую поверхность.
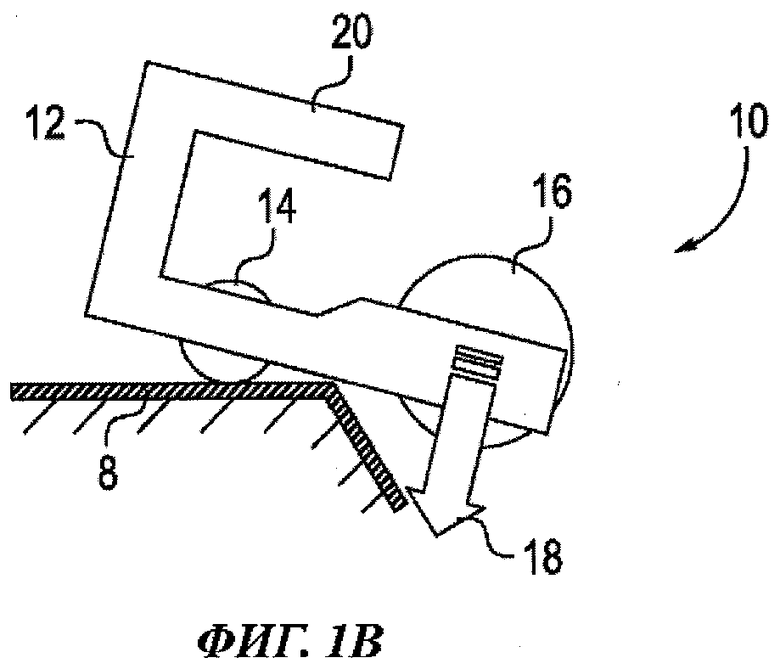
На фигуре 1B показано сканирование выпуклой поверхности контролируемого объекта 8. При перемещении по контролируемому объекту 8 корпус сканирующего устройства 12 зацепляется за него. По этой причине диск 14 кодового датчика положения или барабан 16 не могут контактировать с контролируемым объектом 8, что приводит к ухудшению работы устройства. В частности, направление 18 сканирования не является перпендикулярным к контролируемому объекту 8.
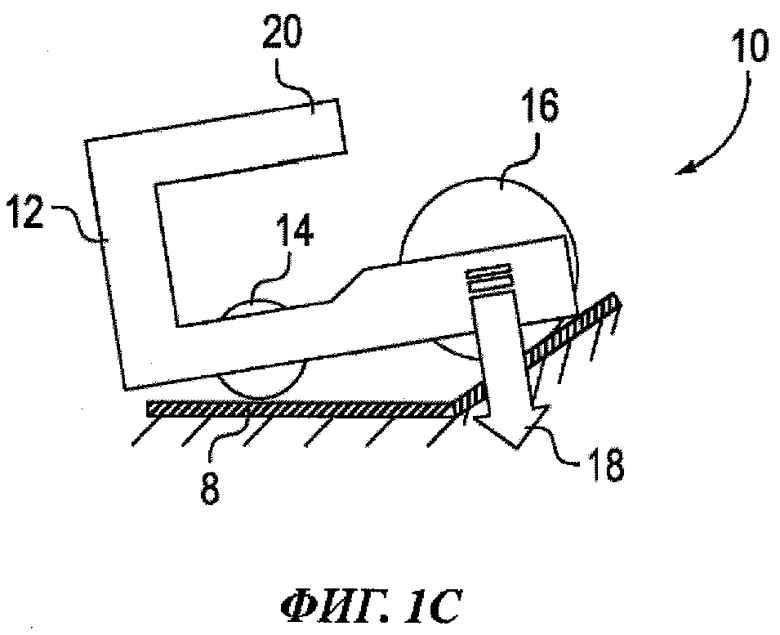
На фигуре 1С показано сканирование вогнутой поверхности контролируемого объекта 8. Хотя диск 14 кодового датчика положения и барабан 16 контактируют с контролируемым объектом, направление 18 сканирования не является перпендикулярным к его поверхности, поскольку диск 14 кодового датчика положения ограничивает поворотное движение сканирующего устройства. Это приводит к ухудшению работы устройства.
На фигуре 2А показано сканирующее устройство 100 согласно настоящему изобретению. Сканирующее устройство 100 содержит корпус 102, узел 104 кодового датчика положения и блок сканирования 106.
Корпус 102 содержит удлиненную цилиндрическую рукоятку 110, которую пользователь может держать в руке. Корпус 102 содержит также раму 112, которая выходит из рукоятки 110 и разделяется на два рычага 114, 116, образуя форму вилки. Рычаги 114, 116 вилки содержат параллельные части 118, 120, соответственно. Параллельные части 118, 120 заканчиваются загнутыми внутрь элементами 124 (показан только один).
На концах загнутых внутрь элементов 124 установлены упругие подкладки 128 (показана только одна).
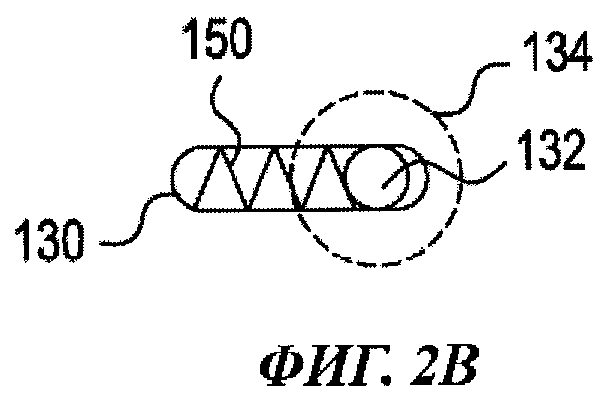
На параллельных частях 118, 120 предусмотрена пара параллельных обращенных друг к другу канавок 130 (показана только одна), функция которых описана ниже.
Узел 104 кодового датчика положения содержит ось 132, на которой кодовый датчик 134 положения установлен с возможностью вращения. Кодовый датчик 134 положения представляет собой датчик роторного типа и сконфигурирован для определения расстояния перемещения по поверхности, с которой он находится в контакте.
Блок 106 сканирования содержит ось 136, на которой установлена ультразвуковая сканирующая матрица 138. На обоих концах оси 136 расположены зажимные узлы 140 (показан только один), которые содержат основание 142, обод 144 коробчатого сечения и подпружиненные фиксаторы 146 (как показано на фигуре 3).
Блок сканирования содержит также барабан 148 с резиновым корпусом, содержащим воду, которая действует как вещество, обеспечивающее акустический контакт для матрицы 138. Барабан 148 установлен на оси 136 с возможностью поворота, таким образом, он может поворачиваться относительно матрицы 138.
Узел 104 кодового датчика положения установлен на корпусе 102 путем вставки концов оси 132 в канавки 130. Пружины 150 (показана только одна) также вставляются в канавки 130 для того, чтобы отжимать ось 132 от рукоятки 110 корпуса 102.
Затем блок сканирования 106 можно присоединить к корпусу 102 путем вставки упругих подкладок 128 в зажимные узлы 140. После этого фиксаторы 146 отводятся наружу для того, чтобы ввести упругие подкладки 128. Когда упругие подкладки 128 будут закреплены в зажимных узлах, фиксаторы возвращаются в исходные позиции для того, чтобы застопорить блок сканирования в рабочем положении.
Когда блок сканирования соединяется с корпусом 102, как описано выше, барабан 148 вступает в контакт с кодовым датчиком 134 положения и перемещает его, преодолевая действие пружин 150 (см. фигуры 2А и 2B). Таким образом, находясь в рабочем положении, барабан 148 имеет надежный контакт с кодовым датчиком 134 положения.
Матрица 138 и кодовый датчик 134 положения подключаются к компьютеру 152 для сбора информации, которая касается результатов сканирования (посредством матрицы 138) и позиции сканирующего устройства (посредством кодового датчика 134 положения). Кодовый датчик положения и сканирующее устройство имеют провода подачи сигналов (не показаны), которые соединяются с главным кабелем 154, проходящим от рукоятки 110 к компьютеру 152.
На фигуре 4А представлено сканирующее устройство 100, обследующее контролируемый объект 80 аналогично устройству, показанному на фигуре 1B. Пользователь (не показан) держит сканирующее устройство 100 за рукоятку 110 перпендикулярно к поверхности контролируемого объекта 80. Матрица 138 сканирует контролируемый объект 80, посылая и принимая ультразвуковые волны в направлении 156 сканирования. При переходе через угол контролируемого объекта пользователь может манипулировать рукояткой 110, чтобы сохранить перпендикулярность к поверхности, поддерживая тем самым перпендикулярное направление 156 сканирования, как показано на фигуре 4А.
Можно видеть, что способность поддерживать направление 156 сканирования перпендикулярным к поверхности обеспечивается одной контактной точкой (или линией) между барабаном 148 и контролируемым объектом 80. Поскольку кодовый датчик 134 положения определяет расстояние, пройденное барабаном 148, нет необходимости для его контакта с контролируемым объектом 80, поэтому проблемы, наблюдаемые на фигурах 1B и 1С, в данном случае не возникают.
Кодовый датчик 100 положения показывает матрицу 138, расположенную таким образом, что ее направление 156 сканирования является параллельным рукоятке 110. Однако матрица может быть также расположена под углом к рукоятке 110. Пример этого показан на фигуре 4B, где элементы кодового датчика 200 положения обозначены таким же ссылочными номерами, как и кодового датчика 100 положения, но с увеличением на 100.
Кодовый датчик 200 положения аналогичен кодовому датчику 100 положения за исключением того, что упругие подкладки 228 установлены под углом к корпусу 202 и, следовательно, к рукоятке 210. Поэтому для сохранения направления 256 сканирования перпендикулярным контролируемому объекту 80 рукоятку 210 следует расположить под некоторым углом А к указанному объекту. Снаружи на упругой подкладке может быть нанесена стрелка или символ для того, чтобы указать пользователю нужное направление 256 сканирования.
Такая конструкция может быть более удобной для пользователя, чем та, в которой рукоятка перпендикулярна к поверхности (т.е., когда А=90 градусов).
Упругие подкладки 228 могут быть установлены на корпусе 202 с возможностью подгонки для того, чтобы пользователь мог производить регулировку в зависимости от его уровня комфорта и пространства, доступного для сканирования.
Альтернативно зажимные узлы могут быть ориентированы в соответствии со сканирующим устройством 100, а матрица может располагаться под углом к зажимным узлам 140. В этом случае угол А будет зависеть от выбора блока 106 сканирования.
На фигуре 5 показано сканирующее устройство 300, аналогичное сканирующему устройству 100. Общие компоненты обозначены ссылочными номерами с увеличением на 200. Вместо параллельных частей 118, 120 рычаги 314, 316 рамы 312 корпуса 302 содержат продольные гнезда 360, 362, соответственно. В указанных гнездах 360, 362 расположены поршни 364, 366, которые выталкиваются в выдвинутую позицию пружинами 368, 370.
Поршни 364, 366 могут перемещаться в осевом направлении относительно рамы 312.
Каждый поршень 364, 366 имеет упругую подкладку (не показана) которая прикреплена к нему и входит в зажимные узлы 340 блока 306 сканирования, как описано выше.
Узел 304 кодового датчика положения также установлен с подпружиниванием в направлении блока сканирования 306, как и в случае сканирующего устройства 100. Однако, будучи расположенным над поршневой конструкцией, узел кодового датчика положения установлен с подпружиниванием на оси 332, которая может перемещаться в прорезях 330, выполненных в дополнительных приливах 372, и которая поджата пружиной 350 (см. фигуру 6).
Поэтому во время эксплуатации блок 306 сканирования сканирующего устройства 300, установленный на корпусе 302, может перемещаться за счет подпружинивания. Во время эксплуатации перемещение барабана 348 сопровождается перемещением узла 304 кодового датчика положения, таким образом, барабан 348 и кодовый датчик 334 положения постоянно находятся в контакте.
На фигурах 7А-7С показано сканирующее устройство 300, перемещаемое пользователем по поверхности контролируемого объекта 80 в направлении D. Указанная поверхность содержит дефект или вогнутый участок 82, который должно обследовать сканирующее устройство 300. Пользователь прикладывает легкое давление в направлении 356 сканирования. Пружины 350, 362 схематически показаны в слегка сжатом состоянии.
Когда сканирующее устройство достигает участка 82, пружины 350, 362 могут разжаться для того, чтобы сохранить контакт барабана 348 с контролируемым объектом 80. При этом контакт не теряется, и сканирование может быть успешно завершено.
На фигурах 8А и 8B показано сканирующее устройство 400, по существу, аналогичное ручному сканирующему устройству 300, при этом ссылочные номера общих компонентов увеличены на 100.
В случае сканирующего устройства 400 ось 436 установлена на рычагах 414, 416 рамы 412 корпуса 402 при помощи поворотных опор 474, таким образом, ось 436 может поворачиваться относительно рамы 412. На этой оси установлена матрица 438 для сканирования в направлении 456 сканирования.
Барабан 448 блока 406 сканирования установлен с возможностью поворота относительно оси 436, как и в предыдущих вариантах осуществления. Барабан 448 показан в разрезе с камерой 476, заполненной водой, которая действует в качестве вещества, обеспечивающего акустический контакт.
К оси 436 в месте ее выхода из барабана 448 присоединены два стабилизатора 478, которые проходят от нее в радиальном направлении. Стабилизаторы проходят примерно до наружной окружности барабана 448.
Во время эксплуатации наружная окружность барабана 448 контактирует с контролируемым объектом 80 и может прокатываться по нему, как описано выше. Однако стабилизаторы 478 в сканирующем устройстве 400 препятствуют повороту оси 436 относительно поверхности контролируемого объекта 80, когда они проходят по этой поверхности. Поэтому матрица 438 ориентирована таким образом, чтобы направление 456 сканирования всегда оставалось перпендикулярным к поверхности контролируемого объекта 80.
Кроме того, благодаря наличию поворотных опор 474, рама 412 может поворачиваться относительно блока 406 сканирования без изменения положения матрицы 438. Поэтому пользователь при желании может постоянно изменять положение руки для обеспечения большего уровня комфорта или для применения сканирующего устройства 400 в ограниченном пространстве.
На фигурах 9А-9С сканирующее устройство 400 показано в различных положениях, в которых барабан 448 и стабилизаторы 478 контактируют с контролируемым объектом 80. Как показано на фигурах 9B и 9С, угол наклона поверхности и/или угол наклона рукоятки устройства может изменяться, не оказывая влияния на перпендикулярность направления сканирования к поверхности контролируемого объекта 80.
Множество видоизменений описанных вариантов осуществления включаются в объем настоящего изобретения.
Так, например, применение кодового датчика положения, контактирующего с барабаном, установку барабана с подпружиниванием, защелкивающийся разъем и стабилизаторы можно использовать по отдельности или в любой пригодной комбинации в зависимости от конкретного применения.
Усовершенствования, описанные выше, можно использовать для не портативного сканирующего устройства (производственного типа), а также для портативного сканирующего устройства (для технического обслуживания) в соответствии с данным описанием.
Защелкивающийся разъем может представлять собой любое быстроразъемное соединение, в частности, утапливаемые подпружиненные штифты, запорные болты/ винты, барашковые гайки и т.п.
Кодовый датчик положения может быть любого типа, например, может представлять собой механическое устройство, как описано выше, или оптическое устройство, которое бесконтактно считывает информацию с поверхности барабана.
Барабан может иметь любую форму, при этом для обеспечения связи не обязательно заполнять его водой. Для этой цели могут быть подходящими, например, деформируемые твердые тела или гели.
Матрица и кодовый датчик положения могут соединяться с компьютером не при помощи проводов, а беспроводным способом.
Соединение между матрицей и компьютером можно обеспечить при помощи контактного соединения с монтажной точкой блока сканирования и рамой, например, рама может иметь открытые соединительные элементы на упругой подкладке, а блок сканирования может иметь соответствующие соединительные элементы на зажимных узлах.
Устройство может содержать только один стабилизатор.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЯ, ИМЕЮЩЕГО СЛОЖНЫЙ КОНТУР | 2008 |
|
RU2469311C2 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТВЕРДЫМ КОНТАКТНЫМ ЭЛЕМЕНТОМ | 2008 |
|
RU2469312C2 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| УСТАНОВКА ИЗМЕРИТЕЛЬНАЯ УЛЬТРАЗВУКОВАЯ И МЕХАНОАКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕЕ | 2007 |
|
RU2351926C2 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛОКОНСТРУКЦИЙ И ТРУБОПРОВОДОВ | 2022 |
|
RU2778619C1 |
| ОПТИКО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЛАЗЕРНО-УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2022 |
|
RU2793566C1 |
| Устройство автоматизированного ультразвукового контроля сварных соединений стенки резервуаров | 2019 |
|
RU2731165C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ ВИЗУАЛИЗАЦИИ ПОСРЕДСТВОМ СИСТЕМЫ УЛЬТРАЗВУКОВОГО ПРЕОБРАЗОВАТЕЛЯ | 2006 |
|
RU2404711C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ДАТЧИКОВ ПРИБОРОВ ПРИ НЕРАЗРУШАЮЩЕМ КОНТРОЛЕ МАГНИТНЫХ МАТЕРИАЛОВ | 2022 |
|
RU2803283C1 |
| ДИСТАНЦИОННАЯ УЛЬТРАЗВУКОВАЯ ДИАГНОСТИКА С УПРАВЛЯЕМЫМ КАЧЕСТВОМ ОТОБРАЖЕНИЯ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2756028C2 |
Использование: для ультразвукового неразрушающего контроля качества металлических и композитных конструкций. Сущность заключается в том, что сканирующее устройство содержит корпус, блок сканирования, включающий в себя ультразвуковую сканирующую матрицу, имеющую определенное направление сканирования, вращающийся компонент, установленный с возможностью поворота относительно корпуса, содержащий обеспечивающее акустический контакт вещество и имеющий периферическую контактную поверхность для контакта с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, вызывает поворот вращающегося компонента, при этом матрица ориентирована с сохранением направления сканирования, перпендикулярного к поверхности, и кодовый датчик положения, содержащий датчик перемещения, предназначенный для измерения перемещения вращающегося компонента, причем матрица установлена с возможностью регулирования путем поворота по отношению к корпусу для обеспечения выбранного фиксированного положения корпуса во время эксплуатации. Технический результат: обеспечение более эргономичного и надежного контроля качества металлических и композитных конструкций. 3 н. и 9 з.п. ф-лы, 9 ил.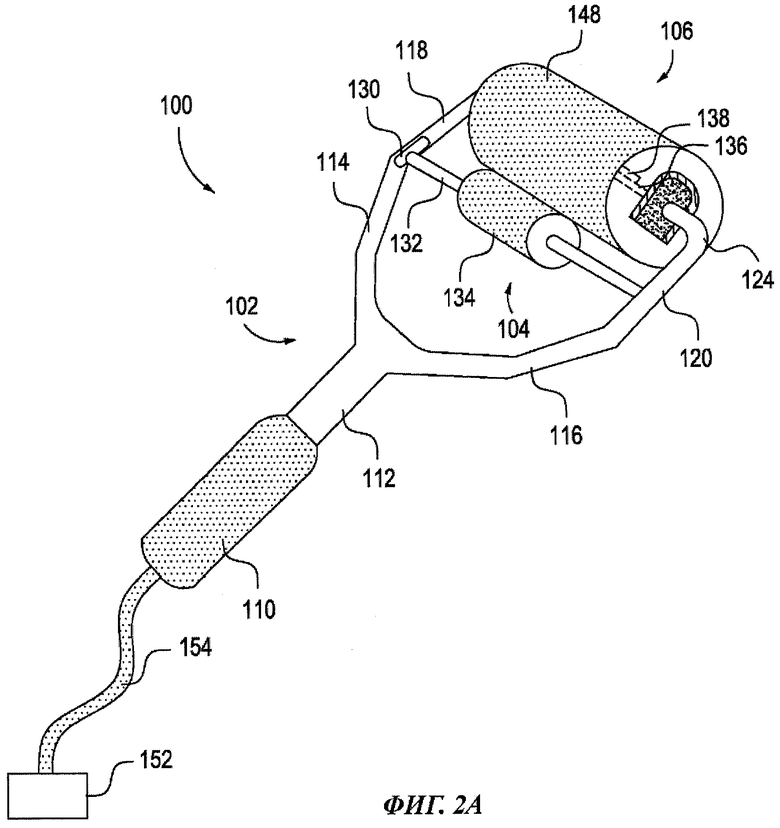
1. Сканирующее устройство, содержащее корпус; блок сканирования, включающий в себя ультразвуковую сканирующую матрицу, имеющую определенное направление сканирования, вращающийся компонент, установленный с возможностью поворота относительно корпуса, содержащий обеспечивающее акустический контакт вещество и имеющий периферическую контактную поверхность для контакта с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, вызывает поворот вращающегося компонента, при этом матрица ориентирована с сохранением направления сканирования, перпендикулярного к поверхности; и кодовый датчик положения, содержащий датчик перемещения, предназначенный для измерения перемещения вращающегося компонента, причем матрица установлена с возможностью регулирования путем поворота по отношению к корпусу для обеспечения выбранного фиксированного положения корпуса во время эксплуатации.
2. Сканирующее устройство по п.1, отличающееся тем, что датчик перемещения находится в контакте с вращающимся компонентом.
3. Сканирующее устройство по п.1, отличающееся тем, что датчик перемещения находится в контакте с периферической контактной поверхностью вращающегося компонента.
4. Сканирующее устройство по п.2 или 3, отличающееся тем, что датчик перемещения представляет собой вращающийся компонент роторного кодового датчика положения.
5. Сканирующее устройство по п.2 или 3, отличающееся тем, что датчик перемещения установлен на корпусе с возможностью перемещения и подпружинен в направлении вращающегося компонента.
6. Сканирующее устройство по одному из пп.1-3, отличающееся тем, что вращающийся компонент подпружинен и установлен с возможностью поступательного перемещения относительно корпуса.
7. Сканирующее устройство по одному из пп.1-3, отличающееся тем, что блок сканирования установлен на корпусе с возможностью съема при помощи быстроразъемного соединения.
8. Сканирующее устройство, содержащее корпус; блок сканирования, включающий в себя ультразвуковую сканирующую матрицу и вращающийся компонент, установленный с возможностью поворота относительно корпуса, содержащий обеспечивающее акустический контакт вещество и имеющий периферическую контактную поверхность для контакта с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, вызывает поворот вращающегося компонента, при этом вращающийся компонент подпружинен и установлен с возможностью поступательного перемещения относительно корпуса; и кодовый датчик положения, содержащий датчик перемещения, предназначенный для измерения перемещения вращающегося компонента путем контакта с вращающимся компонентом, причем датчик перемещения установлен на корпусе с возможностью перемещения и подпружинен в направлении вращающегося компонента.
9. Сканирующее устройство по п.8, отличающееся тем, что вращающийся компонент установлен, посредством своей оси, в корпусе с подпружиниванием и возможностью поступательного перемещения.
10. Сканирующее устройство по п.9, отличающееся тем, что ось закреплена на корпусе в двух отстоящих друг от друга позициях с подпружиниванием и возможностью поступательного перемещения.
11. Сканирующее устройство по п.10, отличающееся тем, что расстояние между указанными позициями перекрывает вращающийся компонент.
12. Сканирующее устройство, содержащее корпус; блок сканирования, включающий в себя ультразвуковую сканирующую матрицу и вращающийся компонент, установленный с возможностью поворота относительно корпуса, содержащий обеспечивающее акустический контакт вещество и имеющий периферическую контактную поверхность для контакта с поверхностью контролируемого объекта с целью обеспечения ультразвуковой связи между матрицей и поверхностью контролируемого объекта таким образом, что перемещение корпуса относительно контролируемого объекта с контактной поверхностью, находящейся в контакте с поверхностью контролируемого объекта, вызывает поворот вращающегося компонента, при этом матрица установлена с возможностью поворота относительно корпуса; и стабилизатор, прикрепленный к матрице с возможностью поворота и имеющий поверхность для контакта с поверхностью контролируемого объекта с целью предотвращения поворота матрицы относительно поверхности контролируемого объекта во время эксплуатации.
| WO 8203920 A1, 11.11.1982 | |||
| US 5404755 A, 11.04.1995 | |||
| Miniature Snap-In Transducers and Wedges | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| http://wayback.archive.org/web/*/http://www.pts.cz/download/panametrics/en_transducer | |||

