Изобретение относится к электротехнике, а именно к системам электроснабжения автономных объектов с использованием в качестве первичного источника энергии солнечной фотоэлектрической установки, а в качестве накопителей энергии - аккумуляторных батарей.
Известен способ управления автономной системой электроснабжения (патент РФ 2168828). Предлагаемый способ решает задачу восстановления нормального функционирования автономной системой электроснабжения после длительных перерывов в ее работе. Техническим результатом является улучшение качества выходного напряжения системы электроснабжения во время и после нештатной или аварийной ситуации, например при потере ориентации солнечных батарей на Солнце. По сигналу о предельной степени разреженности какой-либо аккумуляторной батареи вводят запрет на работу соответствующего разрядного устройства. Данная аккумуляторная батарея переводится в режим хранения. Если после запрета работы некоторых разрядных устройств мощности оставшихся в работе аккумуляторных батарей и разрядных устройств окажется недостаточно для обеспечения питания бортовых потребителей, запрещают работу всех разрядных устройств, а также стабилизатора напряжения, питающего нагрузку от солнечных батарей, прекращают управление разрядными устройствами по сигналам об уровне заряженности аккумуляторных батарей. Система электроснабжения полностью переходит в режим хранения. При этом продолжают контроль состояния всех аккумуляторных батарей. В случае если возникнет опасность переполюсовки аккумуляторов какой-либо батареи, к ним подключают устройство защиты аккумуляторов от переполюсовки. После восстановления ориентации объекта на Солнце сначала производят заряд аккумуляторных батарей до некоторого значения суммарной емкости, а затем (после того, как количество заряженных до требуемого уровня аккумуляторных батарей достигает заданного) разрешается работа стабилизатора напряжения и разрядных устройств, заряженных аккумуляторных батарей и возобновляют управление разрядными устройствами по сигналам об уровне заряженности.
Данный способ обеспечивает восстановление работоспособности системы электроснабжения в случае длительных перерывов в ее работе, однако он не позволяет восстанавливать работу системы электроснабжения в случае покрытия фотоэлектрических поверхностей посторонними материалами и не способен повысить отдачу фотоэлектрических элементов за счет их наиболее рациональной ориентации.
Наиболее близкой по техническому решению и достигаемому результату является Автономная система электроснабжения на основе солнечной фотоэлектрической установки (RU 2479910), включающая солнечную фотоэлектрическую установку (ФЭУ), систему электроснабжения потребителя (СЭП) и систему электропитания приводов слежения за Солнцем (СЭПС), при этом СЭП включает первый блок аккумуляторных батарей (БАК1), первый контроллер процессов заряда-разряда блока аккумуляторных батарей, совмещенного с устройством контроля степени заряженности БАК1 (К1), блок сбора и обработки информации (БСОИ), инвертор (ИН), первый датчик температуры (ДТ1) БАК1 и первый ключ постоянного тока (КЛ1), а СЭПС включает второй блок аккумуляторных батарей (БАК2), второй контроллер (К2), блок управления электропитания электродвигателей приводов горизонтального и вертикального поворотов солнечной фотоэлектрической установки (БУЭ), блок питания и управления электродвигателем (M1) привода горизонтального поворота солнечной фотоэлектрической установки (БПУГ), блок питания и управления электродвигателем (М2) привода вертикального поворота солнечной фотоэлектрической установки (БПУВ), второй датчик температуры (ДТ2) БАК2 и второй ключ постоянного тока (КЛ2), причем положительный выход ФЭУ соединен через КЛ1 с первым входом К1 и через КЛ2 с первым входом К2, а отрицательный выход ФЭУ подключен ко вторым входам К1 и К2, первый вход/выход К1 соединен с первым входом/выходом БСОИ, второй вход/выход К1 подключен к положительному входу/выходу БАК1 и к первому входу ИН, а третий вход/выход К1 подключен к отрицательному входу-выходу БАК1 и ко второму входу ИН, третий вход которого соединен с выходом ДТ1, первый вход/выход ИН подключен ко второму входу/выходу БСОИ, а второй и третий выходы ИН предназначены для соединения с потребителем электроэнергии, первый вход/выход К2 соединен с входом/выходом БУЭ, второй вход/выход К2 подключен к положительному входу/выходу БАК2 и к первому входу БУЭ, а третий вход/выход К2 подключен к отрицательному входу-выходу БАК2 и ко второму входу БУЭ, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами БПУГ, а четвертый, пятый и шестой выходы подключены соответственно к первому, второму и третьему входам БПУВ, четвертый вход/выход К2 подключен к третьему входу/выходу БСОИ, выход БПУГ соединен с входом M1, а выход БПУВ подключен к входу М2.
Упомянутое устройство обеспечивает энергоэффективное снабжение удаленных потребителей электроэнергией высокого качества. Надежность электроснабжения механизмов слежения за Солнцем в отсутствие возможности подключения к централизованной энергосети достигается использованием собственной системы электроснабжения, работающей параллельно с системой электроснабжения потребителя. Однако такое устройство не способно противостоять внешним воздействиям негативных природных факторов, а именно не распознает снижение токоотдачи в случае запыления устройства, не обеспечивает его самоочистку и не может восстанавливать работоспособность в случае, если робот будет засыпан толстым слоем сыпучих веществ (песком, пылью и т.п.).
Настоящее изобретение направлено на расширение функциональных возможностей Системы электроснабжения робота, в том числе на обеспечение ее работоспособности в условиях полевых бурь.
Решение поставленной задачи достигается тем, что в Систему электроснабжения робота дополнительно введены: телескопическое крепление, закрепленное одной своей стороной на корпусе робота с электрическим двигателем, обеспечивающим его выдвижение и складывание, и подключенным одним своим выводом к блоку обработки данных и управления, а другим к корпусу робота, жесткая полусфера, закрепленная внутренней поверхностью на свободном конце телескопического крепления, на наружной поверхности которой расположен комплект фотоэлектрических элементов таким образом, что он своей формой повторяет форму поверхности крепления, акустический и сейсмический датчики, подключенные к блоку обработки данных и управления, при этом пространство между корпусом робота и солнечной фотоэлектрической установки закрыто чехлом, а пространство между упомянутым корпусом робота и жесткой полусферой - цилиндрическим чехлом.
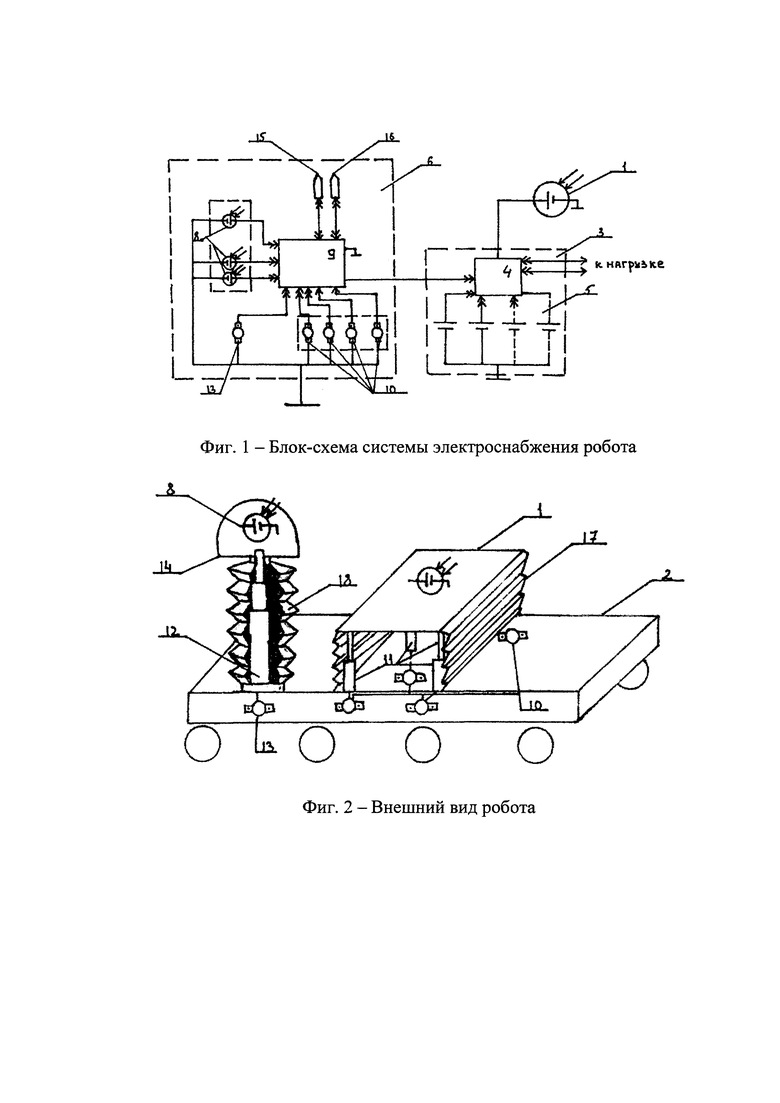
На фиг. 1 представлена блок-схема системы электроснабжения робота, на фиг. 2 - внешний вид робота, оснащенного предлагаемой системой электроснабжения.
Система электроснабжения робота включает в себя солнечную фотоэлектрическую установку 1, корпус робота 2, систему контроля заряда аккумуляторных батарей и обеспечения потребителей 3, состоящую из контроллера 4 и блока аккумуляторных батарей 5, подключенного таким образом, что каждый аккумулятор подключен между контроллером 4 и, через корпус робота 2 - к отрицательному выводу солнечной фотоэлектрической установки 1, положительный вывод которой подключен к контроллеру 4, который в свою очередь подключен к нагрузке, и систему слежения за расположением источников света и управления приводами 6, состоящую из блока управляющих сигналов 7, представляющих собой комплект фотоэлектрических элементов 8, блока обработки данных и управления 9, четырех электрических двигателей 10 солнечной фотоэлектрической установки 1, подключенных между блоком обработки данных и управления 9 и общей шиной, при этом блок обработки данных и управления 9 подключен к каждому фотоэлектрическому элементу из комплекта фотоэлектрических элементов 8, контроллеру 4 и общей шине, четырех телескопических креплений 11, закрепленных одной своей стороной к корпусу робота 2, а другой - к углам солнечной фотоэлектрической установки 1, выдвижение которых осуществляется при помощи четырех электрических двигателей 10, отличающийся тем, что система слежения за расположением источников света и управления приводами 6 оснащена телескопическим креплением 12 закрепленным одной своей стороной на корпусе робота 2 с пятым электрическим двигателем 13, обеспечивающим выдвижение и складывание телескопического крепления 12, и подключенным одним своим выводом к блоку обработки данных и управления 9, а другим к общей шине, жесткой полусферой 14, закрепленной внутренней поверхностью на свободном конце телескопического крепления 12, на наружной поверхности которой расположен комплект фотоэлектрических элементов 8 таким образом, что он своей формой повторяет форму поверхности крепления, акустическим 15 и сейсмическим 16 датчиками, подключенными к блоку обработки данных и управления 9, при этом пространство между корпусом робота 2 и солнечной фотоэлектрической установки 1 закрыто чехлом 17, а пространство между корпусом робота 2 и жесткой полусферой 14 - цилиндрическим чехлом 18.
Система электроснабжения робота работает следующим образом.
Предварительно в память блока обработки данных и управления 9 заносятся соотношения значений электродвижущей силы фотоэлектрических элементов 8 блока управляющих сигналов 7 соответствующих максимальным значениям напряжения и силы тока, вырабатываемым солнечной фотоэлектрической установкой, а также значения периодов за время которых возможно отсутствие освещения. В исходном состоянии на комплект фотоэлектрических элементов 8 блока управляющих сигналов 7 падает свет, под действием которого на каждом фотоэлектрическом элементе из комплекта фотоэлектрических элементов 8 возникает электродвижущая сила, значение которой считывает блок обработки данных и управления 9, определяет фотоэлектрический элемент значение электродвижущей силы которого максимально и дает команду на четыре электрических двигателя 10 солнечной фотоэлектрической установки 1, которые выдвигают либо складывают телескопические крепления 11 таким образом, чтобы плоскость солнечной фотоэлектрической установки 1 располагалась параллельно с минимально возможными отклонениями от плоскости расположения упомянутого фотоэлектрического элемента, тем самым обеспечивая максимальный ток солнечной фотоэлектрической установки 1, возможный при имеющейся силе света. Одновременно блок обработки данных и управления 9 сопоставляет полученное значение напряжения солнечной фотоэлектрической установки, силу тока, вырабатываемого ею со значением электродвижущей силы, возникшей под действием света на фотоэлектрическом элементе, сравнивает их с имеющимися в памяти данными и в случае, если значения упомянутых показателей ниже, чем значения, заложенные в память блока обработки данных и управления 9, подает сигнал поочередно на два из четырех электрических двигателей 10, тем самым обеспечивая максимальный наклон солнечной фотоэлектрической установки 1 и сползание с ее поверхности запыления (песка, пыли, мелких частиц и т.п.). Одновременно контроллер 4 обеспечивает рациональное соотношения токов зарядки блока аккумуляторных батарей 5 и нагрузки в зависимости от выполняемых задач.
При снижении мощности светового потока до значений, при которых невозможно обеспечить положительный баланс электроэнергии, контроллер 4 отключает потребители согласно целям выполняемой задачи. При достижении током, вырабатываемом солнечной фотоэлектрической установкой 1 критических значений контроллер 4 переводит робота в спящий режим - при этом обеспечивается энергопотребление только теми системами, работоспособность которых напрямую влияет на работоспособность робота в целом, например, система подогрева аккумуляторных батарей в условиях низких температур и т.п. При появлении светового излучения на фотоэлектрических элементах 8 вновь возникает электродвижущая сила и система электроснабжения робота продолжает работать в описанном режиме.
В случае, если период отсутствия освещения превышает заданный, заложенный в памяти блока обработки данных и управления 9, возникает вероятность того, что это является следствием климатических процессов, происходящих на поверхности, а именно затмении, туче образовании, полном покрытии робота пылевым слоем и т.п. В упомянутой ситуации блока обработки данных и управления 9 подключает акустический 15 и сейсмический датчик и начинает считывать с них сигналы. Если с датчиков сигналы поступают, это свидетельствует о том, что происходят процессы, влияющие на прозрачность атмосферы и перемещение сыпучих масс. Блок обработки данных и управления 9 фиксирует время между поступающими сигналами и, если промежуток времени превышает заданные значения, включает в работу пятый электрический двигатель 13, который выдвигает телескопическое крепление 12, и, соответственно поднимает жесткую полусферу 14 с закрепленным на ней комплектом электрических фотоэлементов 8. В процессе выдвижения под действием силы тяжести с поверхности комплекта электрических фотоэлементов 8 скатываются частицы, экранирующие попадание света, под действием которого комплект фотоэлектрических элементов 8 генерирует электродвижущую силу, значение которой фиксируется блоком обработки данных и управления 9. Если сила света достаточная для обеспечения заряда аккумуляторных батарей, а оставшегося запаса энергии достаточно для подъема солнечной фотоэлектрической установки 1 при помощи электрических двигателей 10 посредством телескопических креплений 11 - блок обработки данных и управления 9 подает сигнал на два из четырех расположенных рядом электрических двигателей 10, которые выдвигают телескопические крепления таким образом, чтобы солнечная фотоэлектрическая установка 1 поднималась под углом к источнику света, обеспечивающим максимальную отдачу, при этом частицы, экранирующие попадание света на солнечную фотоэлектрическую установку 1 скатываются с ее поверхности, что обеспечивает самоочистку последней. Далее, в зависимости от поставленной задачи, либо продолжается заряд блока аккумуляторных батарей 5, либо параллельно с этим обеспечивается работа потребителей. Если оставшийся заряд блока аккумуляторных батарей 5 оказывается недостаточным для подъема солнечной фотоэлектрической установки 1, то их заряд осуществляется током, вырабатываемым комплектом фотоэлектрических элементов 8 блока управляющих сигналов 7. При этом чехлы 17 и 18 предотвращают попадание посторонних материалов в пространство между корпусом робота 2 и описываемыми подвижными элементами установки.
Таким образом, Система электроснабжения робота распознает снижение токоотдачи в случае запыления устройства, обеспечивает его самоочистку и способна восстанавливать работоспособность в случае, если робот будет засыпан толстым слоем сыпучих веществ (песком, пылью и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ НА ОСНОВЕ СОЛНЕЧНОЙ ФОТОЭЛЕКТРИЧЕСКОЙ УСТАНОВКИ | 2011 |
|
RU2479910C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2325311C2 |
| Комплект электротехнических средств для полевого электроснабжения войск | 2023 |
|
RU2824075C1 |
| СИСТЕМА АВТОНОМНОГО ЭЛЕКТРОСНАБЖЕНИЯ С КОМБИНИРОВАННЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ | 2019 |
|
RU2726735C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322373C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322372C2 |
| Система контроля и оповещения об угрозе столкновения подвижного состава с запрещенным технологическим объектом | 2020 |
|
RU2735557C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322374C2 |
| СОЛНЕЧНАЯ ЭЛЕКТРОСТАНЦИЯ | 2017 |
|
RU2655105C1 |
| Система автономного энергоснабжения жилого дома | 2019 |
|
RU2746434C1 |
Изобретение относится к области электротехники, в частности к системам электроснабжения робота, включающая в себя солнечную фотоэлектрическую установку. Технический результат заключается в расширении функциональных возможностей системы электроснабжения робота и в том числе в обеспечении ее работоспособности в условиях полевых бурь. Достигается тем, что в систему электроснабжения робота дополнительно введены: телескопическое крепление, закрепленное одной своей стороной на корпусе робота с электрическим двигателем, обеспечивающим его выдвижение и складывание, и подключенным одним своим выводом к блоку обработки данных и управления, а другим к корпусу робота, жесткая полусфера, закрепленная внутренней поверхностью на свободном конце телескопического крепления, на наружной поверхности которой расположен комплект фотоэлектрических элементов таким образом, что он своей формой повторяет форму поверхности крепления, акустический и сейсмический датчики, подключенные к блоку обработки данных и управления, при этом пространство между корпусом робота и солнечной фотоэлектрической установки закрыто чехлом, а пространство между упомянутым корпусом робота и жесткой полусферой - цилиндрическим чехлом. 2 ил.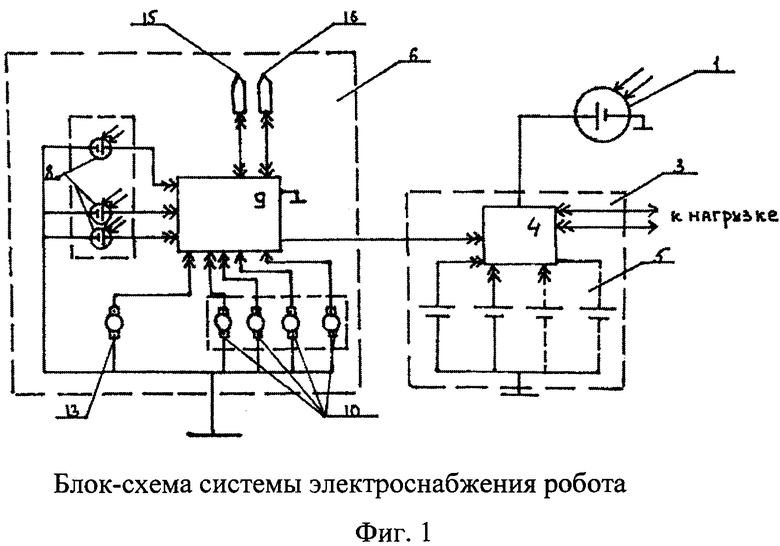
Система электроснабжения робота, включающая в себя солнечную фотоэлектрическую установку, корпус робота, систему контроля заряда аккумуляторных батарей и обеспечения потребителей, состоящую из контроллера и блока аккумуляторных батарей, подключенного таким образом, что каждый аккумулятор подключен между контроллером и, через корпус робота - к отрицательному выводу солнечной фотоэлектрической установки, положительный вывод которой подключен к контроллеру, который, в свою очередь, подключен к нагрузке и систему слежения за расположением источников света и управления приводами, состоящую из блока управляющих сигналов, представляющего собой комплект фотоэлектрических элементов, блока обработки данных и управления, четырех электрических двигателей солнечной фотоэлектрической установки, подключенных между блоком обработки данных и управления и общей шиной, при этом последний подключен к каждому фотоэлектрическому элементу из комплекта фотоэлектрических элементов, контроллеру и общей шине, четырех телескопических креплений, закрепленных одной своей стороной к корпусу робота, а другой - к углам солнечной фотоэлектрической установки, выдвижение которых осуществляется при помощи четырех электрических двигателей, отличающаяся тем, что в нее дополнительно введены телескопическое крепление системы слежения за расположением источников света, закрепленное одной своей стороной на корпусе робота с пятым электрическим двигателем, обеспечивающим выдвижение и складывание упомянутого телескопического крепления, и подключенным одним своим выводом к блоку обработки данных и управления, а другим - к общей шине, жесткая полусфера, закрепленная внутренней поверхностью на свободном конце упомянутого телескопического крепления, на наружной поверхности которой расположен комплект фотоэлектрических элементов таким образом, что он своей формой повторяет форму поверхности крепления, акустический и сейсмический датчики, подключенные к блоку обработки данных и управления, при этом пространство между корпусом робота и солнечной фотоэлектрической установкой закрыто чехлом, а пространство между корпусом робота и жесткой полусферой - цилиндрическим чехлом.
| US 7800247 B2, 21.09.2010 | |||
| СПОСОБ ПОЛУЧЕНИЯ 1-ГЕТАРИЛ-2-НИТРО-2-(3-ФЕНИЛ-1,2,4-ОКСАДИАЗОЛ-5-ИЛ) ЭТАНОВ | 2009 |
|
RU2415140C1 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ НА ОСНОВЕ СОЛНЕЧНОЙ ФОТОЭЛЕКТРИЧЕСКОЙ УСТАНОВКИ | 2011 |
|
RU2479910C1 |
| ГИБРИДНАЯ СИСТЕМА ОСВЕЩЕНИЯ И УПРАВЛЕНИЯ ПОТРЕБЛЕНИЕМ ЭНЕРГИИ ДЛЯ РАБОТЫ В НЕБЛАГОПРИЯТНЫХ УСЛОВИЯХ И/ИЛИ УДАЛЕННЫХ МЕСТОПОЛОЖЕНИЯХ | 2013 |
|
RU2663192C2 |
| СОЛНЕЧНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2005 |
|
RU2286517C1 |

