Изобретение относится к области космической техники, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), и может быть использовано при управлении положением панелей их солнечных батарей (СБ).
Известен способ управления положением панелей СБ, принятый за аналог (см. [1], стр.190-194). Сущность способа заключается в следующем. Панели СБ ориентируются таким образом, что угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце составляет минимальную величину, что обеспечивает максимальный приход электроэнергии от СБ.
Для обеспечения высокой эффективности работы СБ на большинстве КА устанавливают систему их автоматической ориентации на Солнце. В состав такой системы входят солнечные датчики, логически преобразующие устройства и электрические приводы, управляющие положением СБ.
Недостаток указанного способа и системы управления положением СБ КА заключается в том, что в их действиях не предусмотрена защита от негативного воздействия факторов внешней среды (ФВС) на рабочие поверхности панелей СБ, как, например, защита от газов, выходящих из работающих реактивных двигателей (РД) КА (см. [2], стр.311-312; [3], стр.2-27), и потоков протонов и электронов высоких энергий солнечных космических лучей в периоды высокой активности Солнца (см. [2], стр.323; [7]. стр.31, 33).
Наиболее близким из аналогов, принятым за прототип, является способ управления положением СБ КА, описанный в [12]. Суть способа заключается в нижеследующем.
Осуществляют разворот панелей СБ в рабочее положение, обеспечивающее снабжение КА электроэнергией, соответствующее совмещению нормали к ее освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей СБ и направлением на Солнце. Далее определяют момент времени начала негативного воздействия ФВС на рабочую поверхность СБ и осуществляют разворот панелей СБ до момента времени начала воздействия указанных факторов и возвращение панелей СБ в рабочее положение после окончания указанного воздействия. Для этого измеряют плотность текущего потока солнечного электромагнитного излучения и по измеренным значениям определяют момент времени начала солнечной активности, определяют момент времени достижения частицами высоких энергий поверхности КА. В указанный момент времени измеряют плотность потоков частиц высоких энергий - протонов и электронов - и производят сравнение измеренных значений с пороговыми значениями. В случае превышения измеренными значениями пороговых значений потоков протонов и электронов производят разворот панелей СБ на угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце αs_min, соответствующий минимальной площади воздействия потоков частиц высоких энергий на поверхности СБ, определяемый соотношением:
αs_min=arccos(Iн/Im),
где Iн - ток нагрузки от потребителей КА;
Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей СБ перпендикулярно солнечным лучам, при этом за момент времени начала разворота панелей СБ принимают момент времени превышения измеренными значениями верхнего порогового значения плотности потоков указанных частиц высоких энергий, а за момент времени начала возвращения панелей СБ в рабочее положение принимают момент времени, при котором плотность потоков частиц высоких энергий становится ниже верхнего порогового значения.
СБ в системе СЭС МКС являются основными источниками электроэнергии и обеспечивают работу ее бортовых потребителей, включая подзаряд аккумуляторных батарей (АБ), являющихся вторичными источниками электроэнергии на борту МКС (см. [4]). Поворотом СБ уменьшается площадь поражения рабочих поверхностей СБ потоком ФВС. Полностью развернуть панели СБ вдоль поражающего потока ФВС не предоставляется возможным, т.к. необходимо обеспечивать КА и его аккумуляторные батареи вырабатываемой СБ электроэнергией - исходя из этого площадь поражения панелей СБ потоком частиц высоких энергий уменьшается до минимальной путем разворота СБ на угол αs min, необходимый и достаточный для обеспечения бортовых потребителей энергией.
Система управления положением СБ для реализации данного способа, принятого за прототип, описана в [12] и содержит СБ, на жесткой подложке корпуса которой расположены четыре фотоэлектрических батареи (БФ1, БФ2, БФ3, БФ4); устройство поворота СБ (УПСБ); усилительно-преобразующее устройство (УПУ); блок управления ориентацией СБ по направлению на Солнце (БУОСБС); блок разворота СБ в заданное положение (БРСБЗП); два регулятора тока (PT1 и РТ2); блок АБ (БАБ); зарядное устройство для АБ (ЗРУ АБ); блок формирования команд на заряд АБ (БФКЗ АБ); датчик тока нагрузки (ДТН); блок управления системой энергоснабжения (БУСЭС); шина электроснабжения (ШЭ); блок измерения плотности текущего потока солнечного ЭМИ (БИПЭМИ); блок определения солнечной активности (БОСА); блок определения момента времени воздействия частиц на КА (БОМВВЧ); блок измерения плотности потоков частиц высоких энергий (БИППЧВЭ); блок определения момента времени начала управления СБ по токам нагрузки (БОМВУСБТНЗ); блок управления СБ по токам нагрузки (БУСБТНЗ). При этом СБ через свой первый выход, объединяющий выходы БФ1 и БФ4, соединена с первым входом УПСБ, и через второй выход, объединяющий выходы БФ2 и БФ3, соединена со вторым входом УПСБ.
Выходы БУОСБС и БРСБЗП соединены, соответственно, с первым и вторым входами УПУ, выход которого, в свою очередь, соединен с третьим входом УПСБ. Первый и второй выходы УПСБ соединены, соответственно, с входами РТ1 и РТ2, а выходы PT1 и РТ2 соединены с ШЭ. БАБ своим входом через ЗРУ АБ соединен с ШЭ. При этом ЗРУ АБ подключено своим первым входом к указанной шине, а ко второму входу ЗРУ АБ подключен выход ДТН, вход которого подключен, в свою очередь, к ШЭ. БАБ своим выходом подключен к первому входу БФКЗ АБ, а ко второму входу указанного блока подключен первый выход БУСЭС. Выход БФКЗ АБ подключен к третьему входу ЗРУ АБ. Вторые и третьи выходы БУСЭС подключены соответственно к первым входам БУОСБС и БРСБЗП. Третий выход УПСБ соединен со вторыми входами БУОСБС и БРСБЗП. Выход БИПЭМИ соединен с входом БОСА, первый выход которого, в свою очередь, соединен с входом БОМВВЧ. Выходы БОМВВЧ и БИППЧВЭ соединены с, соответственно, первым и вторым входами блока БОМВУСБТНЗ, а вход БИППЧВЭ соединен со вторым выходом БОСА. Выход БОМВУСБТНЗ соединен с входом БУСЭС. БУСЭС своим четвертым выходом соединен с первым входом БУСБТНЗ, а ко второму входу БУСБТНЗ подключен второй выход ДТП. Выход БУСБТНЗ подключен к третьему входу УПУ. Кроме этого, третий выход УПСБ соединен с третьим входом БУСБТНЗ.
В режиме электроснабжения КА система работает следующим образом. Во время работы на солнечной орбите (без захода в тень Земли на витке орбиты КА) мощность нагрузки, как правило, ниже мощности СБ. При этом УПСБ служит для транзитной передачи электроэнергии от СБ до PT1 и PT2. Стабилизация напряжения на шине электропитания СЭС осуществляется одним из РТ. В то же время другой РТ находится в состоянии с замкнутыми силовыми транзисторами. Генераторы СБ работают в этом случае в режиме короткого замыкания. Когда мощность нагрузки становится больше мощности подключения генераторов СБ, в режим стабилизации напряжения переходит другой РТ и энергия незадействовавшихся генераторов поступает на шину питания СЭС. В отдельные периоды, когда мощность нагрузки может превышать мощность СБ, ЗРУ АБ, за счет разряда блока АБ, компенсирует дефицит электроэнергии на борту КА. Для указанных целей в ЗРУ АБ служит регулятор разряда АБ. Энергия БАБ используется также при затенениях СБ (при входе КА в тень Земли, отворота батарей от направления на Солнце).
Кроме указанного регулятора, ЗРУ АБ содержит и регулятор заряда АБ. Регулятор заряда осуществляет ограничение зарядного тока БАБ на уровне (Iнз±1)А, где Iнз - номинальный ток заряда, при избытке мощности БФ и стабилизацию напряжения на шине СЭС за счет регулирования зарядного тока БАБ при мощности БФ, недостаточной для обеспечения питания АБ током заряда (Iнз±1)А. Для проведения указанных зарядно-разрядных циклов в ЗРУ АБ используется информация от ДТН. При этом ДТН подключен в СЭС таким образом, что измеряет ток нагрузки не только от бортовых потребителей, но и учитывает ток заряда АБ. Заряд БАБ осуществляет ЗРУ АБ через БФКЗ АБ.
Одновременно с работой в режиме электроснабжения КА система решает задачи управления положением плоскостей панелей СБ.
По команде с БУСЭС блок БУОСБС осуществляет управление ориентацией СБ на Солнце. БУОСБС может быть реализован на базе системы управления движением и навигацией (СУДН) КА (см. [6]). При этом входной информацией для алгоритма управления СБ являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат, определяемое алгоритмами кинематического контура СУДН; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла α с датчиков угла (ДУ), установленных на УПСБ. При этом значение α всегда отсчитывается от текущей нормали к рабочей поверхности СБ (т.о. при ориентации СБ на Солнце α минимален). Выходной информацией алгоритма управления являются команды на вращение СБ по или против часовой стрелки (углы αs) относительно оси выходного вала УПСБ, команды на прекращение вращения. ДУ УПСБ выдают дискретные сигналы о положении СБ. Величина дискреты определяет точность ориентации СБ.
В штатном режиме ориентации КА, когда направление движения Солнца относительно связанных осей КА неизменно, СБ устанавливается относительно направления на Солнце с опережением по ходу движения Солнца на угол, соответствующий нескольким дискретам ДУ. Далее батарея остается в этом положении до тех пор, пока Солнце, за счет движения КА по орбите, не "переместится вперед" относительно СБ на соответствующий угол. После этого цикл вращения возобновляется.
БРСБЗП управляет СБ при помощи БУСЭС по программным уставкам. Алгоритм управления СБ по программным уставкам позволяет устанавливать батарею в любое задаваемое положение. Для этого выдается первоначально сигнал в БУОСБС об установке СБ в исходное положение. Далее при помощи БУСБЗП осуществляется требуемый разворот на угол αz. При этом для контроля угла разворота в БРСБЗП используется также информация с ДУ УПСБ.
УПУ играет роль интерфейса между БУОСБС, БРСБЗП, БУСБТНЗ и УПСБ.
БИПЭМИ производит постоянное измерение текущих потоков солнечного электромагнитного излучения (ЭМИ) по индексу солнечной активности F 10,7 и передает их в БОСА. В БОСА путем сравнения текущих значений с заданными пороговыми определяется начало активности Солнца. По команде, приходящей с первого выхода БОСА на вход БОМВВЧ, в указанном последнем блоке производится определение момента времени возможного начала воздействия частиц высоких энергий на КА. Со второго выхода БОСА через вход БИППЧВЭ выдается команда на начало измерения плотности потока частиц высоких энергий. Информация о моменте времени возможного начала воздействия частиц на КА передается с выхода БОМВВЧ в БОМВУСБТНЗ через его первый вход. На второй вход БОМВУСБТНЗ передается измеренное значение плотности потоков частиц высоких энергий с БИППЧВЭ.
В БОМВУСБТНЗ осуществляется фактическая оценка негативного воздействия ФВС путем сравнения текущего измеренного значения характеристики воздействия с пороговыми значениями, начиная с момента времени, определенного БОМВВЧ. Необходимым условием получения команды на выходе БОМВУСБТНЗ является наличие двух сигналов - с выходов БОМВВЧ и БИППЧВЭ. На выходе БОМВУСБТНЗ формируется команда "начало управления СБ по токам нагрузки", которая поступает в БУСЭС.
Когда БОМВУСБТНЗ выдает команду в БУСЭС, команда, полученная с БОМВУСБТНЗ, является по приоритету более высокой, чем команды на задействование БУОСБС и БРСБЗП. Поэтому, получив указанную команду, БУСЭС отключает от управления УПСБ блоки более низкого приоритета и подключает БУСБТНЗ.
После обнуления команды с БОМВУСБТНЗ на входе БУСЭС последний перестраивает логику своей работы. В зависимости от выполняемой программы полета КА, приоритет на управление СБ отдается одному из блоков БУОСБС или БРСБЗП.
БУСБТНЗ определяет угол αs_min по выражению:

Для расчета указанного угла используются измеренные значения Iн, получаемые с ДТН. Кроме того, с ДУ УПСБ в указанный блок поступает информация о текущем значении угла поворота СБ α. Определив значение угла αs_min, алгоритм, зало женный в БУСБТНЗ, сравнивает его с текущим значением угла α, рассчитывает угол рассогласования между α и αs_min и необходимое число управляющих импульсов для задействования управляющего привода СБ. Управляющие импульсы передаются в УПУ. После преобразования и усиления указанных импульсов в УПУ, они поступают на вход УПСБ и приводят привод в движение.
При этом управление СБ по результатам расчета угла α может строиться только для случая Iн=const. В другом случае, когда наблюдаются колебания тока нагрузки, целесообразно строить управление, используя в (1) вместо Iн максимально возможный ток нагрузки Iн_max на заданном интервале полетного времени. Это связано с тем, что управляющий привод СБ не может практически мгновенно отслеживать текущие изменения тока нагрузки, приводящие к необходимым изменениям текущего угла α.
Способ и система для его осуществления, принятые за прототип, имеют существенный недостаток - они не позволяют уменьшать негативное воздействие на СБ КА такого ФВС, как набегающий поток атмосферы Земли. Набегающий поток атмосферы, наряду с повреждениями элементов фотоэлектрических батарей частицами, метеоритами, орбитальными обломками, находящимися в набегающем потоке, создает давление на СБ, в результате которого создается нагрузка на узлы крепления СБ, а также увеличивается аэродинамическое сопротивление движению КА, приводящее к торможению КА, уменьшению высоты его орбиты и необходимости расхода дополнительных энергетических ресурсов КА на подъем орбиты до уровня, необходимого для обеспечения жизнеспособности и выполнения целевых задач КА.
Задачей, стоящей перед предлагаемыми способом и системой для его осуществления, является уменьшение негативного воздействия набегающего потока на поверхности СБ. Для этого за счет управления СБ предполагается уменьшить площадь СБ, на которую воздействует набегающий поток.
Технический результат достигается тем, что в способе управления положением солнечных батарей космического аппарата, включающем разворот панелей солнечных батарей в рабочее положение, обеспечивающее снабжение космического аппарата электроэнергией, соответствующее совмещению нормали к ее освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей солнечных батарей и направлением на Солнце, определение момента времени начала негативного воздействия факторов внешней среды на рабочую поверхность солнечных батарей, разворот панелей солнечных батарей до момента времени начала воздействия указанных факторов и возвращение панелей солнечных батарей в рабочее положение после окончания указанного воздействия, дополнительно определяют моменты времени освещенности космического аппарата Солнцем, в моменты времени освещенности космического аппарата Солнцем измеряют угол между направлением на Солнце и направлением оси вращения панелей солнечных батарей, используя измеренные значения данного угла, определяют текущее максимально-возможное значение тока от солнечных батарей и определяют моменты времени превышения определяемым значением тока от солнечных батарей значения тока нагрузки, в моменты времени превышения определяемым значением тока от солнечных батарей значения тока нагрузки измеряют направление вектора скорости космического аппарата, определяют площадь проекции панелей солнечных батарей на плоскость, перпендикулярную направлению вектора скорости космического аппарата, производят сравнение определяемого значения площади с заданным пороговым значением и в случае превышения определяемым значением площади сравниваемого с ним порогового значения производят разворот панелей солнечных батарей до достижения значения угла между нормалью к их освещенной рабочей поверхности и проекцией направления на Солнце на плоскость, перпендикулярную оси вращения панелей солнечных батарей, Δγsv_min, соответствующего минимальной площади воздействия набегающего потока на поверхность солнечных батарей при одновременном обеспечении космического аппарата электроэнергией, определяемого по формуле:
Δγsv_min=min {arccos(Iн/(Imsin δSL)), arccos (sin δSV)},
где Iн - ток нагрузки от потребителей космического аппарата;
Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам;
δSL - угол между направлением на Солнце и направлением оси вращения панелей солнечных батарей;
δSV - угол между проекциями направлений на Солнце и вектора скорости космического аппарата на плоскость, перпендикулярную оси вращения панелей солнечных батарей,
причем за момент времени начала разворота панелей солнечных батарей принимают момент времени превышения определяемым значением площади проекции панелей солнечных батарей порогового значения, а за момент времени начала возвращения панелей солнечных батарей в рабочее положение принимают момент времени, при котором определяемое значение площади проекции панелей солнечных батарей становится ниже порогового значения, при этом в моменты нахождения космического аппарата в тени Земли производят разворот панелей солнечных батарей в положение, соответствующее совмещению плоскости панелей солнечных батарей с вектором скорости космического аппарата.
Кроме того, поставленная задача решается тем, что в систему управления положением солнечных батарей космического аппарата, включающую солнечную батарею с установленными на ней четырьмя фотоэлектрическими батареями, устройство поворота солнечных батарей, усилительно-преобразующее устройство, блок управления ориентацией солнечных батарей по направлению на Солнце, блок разворота солнечных батарей в заданное положение, два регулятора тока, блок аккумуляторных батарей, зарядное устройство для аккумуляторных батарей, блок формирования команд на заряд аккумуляторных батарей, датчик тока нагрузки, блок управления системой электроснабжения, шину электроснабжения, блок определения момента времени начала управления солнечными батареями по токам нагрузки, блок управления солнечными батареями по токам нагрузки, при этом солнечная батарея через свой первый выход, объединяющий выходы двух фотоэлектрических батарей, соединена с первым входом устройства поворота солнечных батарей, и через второй выход, объединяющий выходы двух других фотоэлектрических батарей, соединена со вторым входом устройства поворота солнечных батарей, а выходы блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение соединены соответственно с первым и вторым входами усилительно-преобразующего устройства, выход которого, в свою очередь, соединен с третьим входом устройства поворота солнечных батарей, первый и второй выходы устройства поворота солнечных батарей соединены соответственно с входами первого и второго регуляторов тока, а выходы регуляторов тока соединены с шиной электроснабжения, блок аккумуляторных батарей своим входом, через зарядное устройство для аккумуляторных батарей, соединен с шиной электроснабжения, при этом зарядное устройство аккумуляторных батарей подключено своим первым входом к указанной шине, а ко второму входу зарядного устройства для аккумуляторных батарей подключен датчик тока нагрузки, который подключен, в свою очередь, к шине электроснабжения, блок аккумуляторных батарей своим выходом подключен к первому входу блока формирования команд на заряд аккумуляторной батареи, а ко второму входу указанного блока подключен первый выход блока управления системой электроснабжения, выход блока формирования команд на заряд аккумуляторной батареи подключен к третьему входу зарядного устройства аккумуляторной батареи, вторые и третьи выходы блока управления системой электроснабжения подключены соответственно к первым входам блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение, третий выход устройства поворота солнечных батарей, соединен со вторыми входами блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение, выход блока определения момента времени начала управления солнечными батареями по токам нагрузки соединен с входом блока управления системой электроснабжения, четвертый выход которого, в свою очередь, соединен с первым входом блока управления солнечными батареями по токам нагрузки, ко второму входу блока управления солнечными батареями по токам нагрузки подключен второй выход датчика тока нагрузки, выход блока управления солнечными батареями по токам нагрузки подключен к третьему входу усилительно-преобразующего устройства, третий выход устройства поворота солнечных батарей соединен с третьим входом блока управления солнечными батареями по токам нагрузки, дополнительно введены блок определения моментов освещенности космического аппарата, блок измерения угла между направлением на Солнце и направлением оси вращения панелей солнечных батарей, блок определения моментов времени превышения максимальным током от солнечных батарей тока нагрузки, блок измерения направления вектора скорости космического аппарата, блок определения площади проекции панелей солнечных батарей на плоскость, перпендикулярную вектору скорости космического аппарата, блок управления ориентацией солнечных батарей по направлению вектора скорости космического аппарата, элемент НЕ, при этом выход блока измерения направления вектора скорости космического аппарата соединен со входом блока определения площади проекции панелей солнечных батарей на плоскость, перпендикулярную вектору скорости космического аппарата, выход которого соединен с вторым входом блока определения момента времени начала управления солнечными батареями по токам нагрузки, первый вход которого соединен с выходом блока определения моментов времени превышения максимальным током от солнечных батарей тока нагрузки, первый и второй входы которого соединены с, соответственно, вторым выходом датчика тока нагрузки и выходом блока измерения угла между направлением на Солнце и направлением оси вращения панелей солнечных батарей, вход которого соединен с выходом блока определения моментов освещенности космического аппарата, выход которого также соединен через элемент НЕ со вторым входом блока управления системой электроснабжения, пятый выход которого соединен с первым входом блока управления ориентацией солнечных батарей по направлению вектора скорости космического аппарата, второй вход и выход которого соединены с, соответственно, третьим выходом устройства поворота солнечных батарей и четвертым входом усилительно-преобразующего устройства.
Суть предлагаемых изобретений поясняется на фиг.1-4. При этом приведены: на фиг.1 - блок-схема разработанной системы; на фиг.2 - построения используемых в описании векторов и углов; на фиг.3, 4 - схемы витка орбиты КА, поясняющие действия предлагаемых изобретений.
Набегающий поток воздействует на элементы конструкции КА тем больше, чем больше площадь проекции элементов на плоскость, перпендикулярную направлению набегающего потока, которое, в свою очередь, параллельно направлению вектора скорости КА. Можно уменьшить площадь воздействия набегающего потока атмосферы Земли на СБ КА, развернув их на рассчитываемый угол, необходимый и достаточный для обеспечения бортовых потребителей электроэнергией и при этом соответствующий минимальной площади воздействия набегающего потока на поверхность СБ.
Исходя из необходимой достаточности для работы бортовых систем КА нагрузка от потребителей Iн не должна превышать текущий ток I. Поскольку текущий ток I от СБ определяется выражением (см. [9], стр.109):

где Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам;
α - текущий угол между нормалью к рабочей поверхности СБ и направлением на Солнце,
то текущий угол α не должен превышать величину αmax, рассчитываемую по формуле:

Тогда значение угла α, соответствующее минимальной площади воздействия набегающего потока на поверхность СБ при одновременном обеспечении КА электроэнергией и обозначаемое как αsv_min, определяется соотношением:

где δSL - угол между направлением на Солнце и направлением оси вращения панелей СБ;
δSN - угол между проекцией направления на Солнце на плоскость, перпендикулярную оси вращения панелей СБ, (вектор NS) и направлением, перпендикулярным плоскости, образуемой осью вращения панелей СБ и вектором скорости КА, (вектор NV);
αv - угол между направлением на Солнце и вектором NV.
Рассмотрим угол γ, отсчитываемый от нулевого положения нормали к рабочей поверхности СБ относительно корпуса КА до текущего положения нормали. Углы α и γ связаны соотношением:

где γs - угол между нулевым положением нормали СБ и вектором NS.
Тогда значение угла γ, соответствующее (4) и обозначаемое как γsv_min, определяется соотношением:

где угол Δγsv_min определяется по формуле:

или

где δSV - угол между проекциями направления на Солнце и вектора скорости КА на плоскость, перпендикулярную оси вращения панелей СБ.
При этом (7), (8) имеют смысл только тогда, когда нагрузка от потребителей Iн не превышает величины Imsin δSL, являющейся текущей максимально-возможной величиной тока от СБ:


где угол (δSL-90°) равен минимально-возможному значению угла α на текущем витке орбиты КА.
На фиг.2 представлены построения используемых векторов и обозначено:
N - вектор нормали к рабочей поверхности СБ;
L - вектор направления оси вращения панелей СБ;
S - вектор направления на Солнце;
V - вектор скорости КА;
Р - вектор нулевого положения нормали к рабочей поверхности СБ относительно корпуса КА;
NS - вектор проекции направления на Солнце на плоскость, перпендикулярную оси вращения панелей СБ, NS=[[L, S], L];
VP - вектор проекции вектора скорости КА на плоскость, перпендикулярную оси вращения панелей СБ, VP=[[L, V], L];
NV - вектор перпендикуляра к плоскости, образуемой осью вращения панелей СБ и вектором скорости КА, NV=[L, V].
При данных обозначениях используемые углы составляют:
α, αv, δSL - углы между вектором S и векторами N, NV, L;
δSN, δSV - углы между вектором NS и векторами NV, VP;
γ, γs, γv - углы между вектором Р и векторами N, NS, NV.
Осуществляя текущее управление угловым положением СБ в соответствии с выражением (6) за момент времени начала возвращения панелей СБ в рабочее положение принимаем момент времени, при котором определяемое значение площади проекции панелей СБ на плоскость, перпендикулярную вектору скорости КА, становится ниже порогового значения. Данное пороговое значение может определяться как величиной погрешности построения и поддержания ориентации СБ, так и оценкой допустимой величины площади воздействия набегающего потока на поверхность СБ.
При этом на теневом участке орбиты КА нет необходимости ориентировать СБ на Солнце, и осуществляется режим управления ориентацией СБ по направлению вектора скорости КА, при котором СБ разворачивают в положение, соответствующее совмещению плоскости панелей СБ с вектором скорости КА, при котором совмещаются N и NV:

В данном положении СБ обнуляется воздействие набегающего потока на плоскость панелей СБ.
На фиг.3 и фиг.4 приведены схемы витков орбиты КА, поясняющие действия предлагаемых изобретений, соответственно, для случая солнечной орбиты и для случая наличия теневого участка на витке орбиты КА, и дополнительно введены обозначения (при этом для наглядности данных схем вектор L направлен перпендикулярно к плоскости орбиты КА, совпадающей с плоскостью рисунка):
Z - Земля;
R - орбита КА;
Sp - вектор проекции направления на Солнце на плоскость орбиты;
N - положения вектора нормали к рабочей поверхности СБ, повернутого в соответствии с действиями предлагаемого изобретения;
Т1, Т2, Т3, Т4 - точки совпадения определяемого значения площади проекции панелей СБ со сравниваемым с ним пороговым значением до (точки T1 и Т2) и после (точки Т3 и Т4) орбитального полудня;
Т5, Т6 - моменты входа и выхода КА из тени Земли.
В соответствии с действиями предлагаемого изобретения режим поворота СБ по соотношению (6) выполняется в интервале между точками (Т1, Т2) и (Т3, Т4) - для случая солнечной орбиты КА, и между точками (max{Т6, Т1}, Т2) и (Т3, min{T5, Т4}) - при наличии теневого участка на витке орбиты КА; а ориентация плоскости СБ по вектору скорости КА по соотношению (11) выполняется на теневой части орбиты - в интервале между точками (Т5, Т6).
Для реализации способа предлагается система, представленная на фиг.1 и содержащая следующие блоки:
1 - СБ, на жесткой подложке корпуса которой расположены четыре фотоэлектрические батареи;
2, 3, 4, 5 - четыре фотоэлектрические батареи (БФ1, БФ2, БФ3, БФ4, соответственно);
6 - устройство поворота СБ (УПСБ);
7 - усилительно-преобразующее устройство (УПУ);
8 - блок управления ориентацией СБ по направлению на Солнце (БУОСБС);
9 - блок разворота СБ в заданное положение (БРСБЗП);
10, 11 - регуляторы тока РТ1 и РТ2;
12 - блок АБ (БАБ);
13 - зарядное устройство для АБ (ЗРУ АБ);
14 - блок формирования команд на заряд АБ (БФКЗ АБ);
15 - датчик тока нагрузки (ДТН);
16 - блок управления системой энергоснабжения (БУСЭС);
17 - шина электроснабжения (ШЭ);
18 - блок управления ориентацией СБ по направлению вектора скорости КА (БУОСБНС);
19 - блок определения моментов освещенности КА (БОМОКА);
20 - блок измерения угла между направлением на Солнце и направлением оси вращения панелей солнечных батарей (БИУСОВСБ);
21 - блок определения моментов времени превышения максимальным током от СБ тока нагрузки (БОМПММТСБТН);
22 - блок определения момента времени начала управления СБ по токам нагрузки АБ (БОМВУСБТНЗ);
23 - блок управления СБ по токам нагрузки АБ (БУСБТНЗ);
24 - блок измерения направления вектора скорости КА (БИНВС);
25 - блок определения площади проекции панелей СБ на плоскость, перпендикулярную вектору скорости КА (БОПППСБ);
26 - элемент НЕ.
При этом СБ (1) через свой первый выход, объединяющий выходы БФ1 (2) и БФ4 (5), соединена с первым входом УПСБ (6), и через второй выход, объединяющий выходы БФ2 (3) и БФ3 (5), соединена со вторым входом УПСБ (6). Выходы БУОСБС (8) и БРСБЗП (9) соединены, соответственно, с первым и вторым входами УПУ (7), выход которого, в свою очередь, соединен с третьим входом УПСБ (6). Первый и второй выходы УПСБ (6) соединены, соответственно, с входами PT1 (10) и РТ2 (11), а выходы PT1 (10) и РТ2 (11) соединены с ШЭ (17). БАБ (12) своим входом через ЗРУ АБ (13) соединен с ШЭ (17). При этом ЗРУ АБ (13) подключено своим первым входом к указанной шине, а ко второму входу ЗРУ АБ (13) подключен выход ДТН (15), вход которого подключен, в свою очередь, к ШЭ (17). БАБ (12) своим выходом подключен к первому входу БФКЗ АБ (14), а ко второму входу указанного блока подключен первый выход БУСЭС (16). Выход БФКЗ АБ (14) подключен к третьему входу ЗРУ АБ (13). Вторые и третьи выходы БУСЭС (16) подключены, соответственно, к первым входам БУОСБС (8) и БРСБЗП (9). Третий выход УПСБ (6) соединен со вторыми входами БУОСБС (8) и БРСБЗП (9). Выход БОМВУСБТНЗ (22) соединен с первым входом БУСЭС (16). БУСЭС (16) своим четвертым выходом соединен с первым входом БУСБТНЗ (23), а ко второму входу БУСБТНЗ (23) подключен второй выход ДТН (15). Выход БУСБТНЗ (23) подключен к третьему входу УПУ (7). Третий выход УПСБ (6) соединен с третьим входом БУСБТНЗ (23). Выход БИНВС (24) соединен с входом БОПППСБ (25). Выход БОПППСБ (25) соединен с вторым входом БОМВУСБТНЗ (22). Первый вход БОМВУСБТНЗ (22) соединен с выходом БОМПМТСБТН (21). Первый и второй входы БОМПМТСБТН (21) соединены с, соответственно, вторым выходом ДТН (15) и выходом БИУСОВСБ (20). Вход БИУСОВСБ (20) соединен с выходом БОМОКА (19). Выход БОМОКА (19) также соединен через элемент НЕ (26) со вторым входом БУСЭС (16). Пятый выход БУСЭС (16) соединен с первым входом БУОСБНС (18). Второй вход и выход БУОСБНС (18) соединены с, соответственно, третьим выходом УПСБ (6) и четвертым входом УПУ (7).
На фиг.1 также пунктиром показана механическая связь УПСБ (6) с корпусом СБ (1) через выходной вал привода батареи.
В режиме электроснабжения КА система работает следующим образом.
УПСБ (6) служит для транзитной передачи электроэнергии от СБ (1) до РТ1 (10) и РТ2 (11). Стабилизация напряжения на шине электропитания СЭС осуществляется одним из РТ. В то же время другой РТ находится в состоянии с замкнутыми силовыми транзисторами. Генераторы СБ (1) (БФ1-БФ4) работают в этом случае в режиме короткого замыкания. Когда мощность нагрузки становится больше мощности подключения генераторов СБ (1), в режим стабилизации напряжения переходит другой РТ и энергия незадействовавшихся генераторов поступает на шину питания СЭС. В отдельные периоды, когда мощность нагрузки может превышать мощность СБ (1), ЗРУ АБ (13), за счет разряда блока АБ (12), компенсирует дефицит электроэнергии на борту КА. Для указанных целей в ЗРУ АБ (13) служит регулятор разряда АБ. Энергия БАБ (12) используется также при затенениях СБ.
Кроме указанного регулятора ЗРУ АБ (13), содержит и регулятор заряда АБ. Для проведения зарядно-разрядных циклов в ЗРУ АБ (13) используется информация от ДТП (15). При этом ДТН (15) подключен в СЭС таким образом, что измеряет ток нагрузки не только от бортовых потребителей, но и учитывает ток заряда АБ. Заряд БАБ (12) осуществляет ЗРУ АБ (13) через БФКЗ АБ (14). Для случая металлводородных АБ он описан в [5]. Суть заключается в том, что по датчикам давления, установленным внутри батарей, и температурах на корпусах батарей производится определение плотности водорода в корпусе АБ. В свою очередь плотность водорода определяет уровень заряженности АБ. При понижении плотности водорода в батарее ниже установленного уровня выдается команда на ее заряд, а при достижении максимального уровня плотности - на прекращение заряда. С помощью БУСЭС (16) можно регулировать указанные уровни заряда батареи через БФКЗ АБ (14).
Одновременно с работой в режиме электроснабжения КА система решает задачи управления положением плоскостей панелей СБ (1).
В БОМОКА (19) определяются моменты времени, когда КА находится на освещенной Солнцем части орбиты КА. Информация о моменте времени освещения КА Солнцем передается с выхода БОМОКА (19) на вход элемента НЕ (26), на выходе которого при этом генерируется сигнал нулевого уровня, и на первый вход БИУСОВСБ (20). По данной команде БИУСОВСБ (20) производит измерение угла δSL и передает его значение на первый вход БОМПМТСБТН (21). На второй вход БОМПМТСБТН (21) с ДТН (15) поступают измеренные значения тока нагрузки Iн. В БОМПМТСБТН (21) в соответствии с соотношениями (9), (10) производится определение момента времени превышения максимально-возможным значением тока, который могут выработать СБ при текущем значении угла δSL, значения текущего тока нагрузки. Информация о моменте времени превышения максимальным током от СБ тока нагрузки передается с выхода БОМПМТСБТН (21) на первый вход БОМВУСБТНЗ (22).
БИНВС (24) производит измерение текущего направления вектора скорости КА в связанной с КА системе координат и передает его в БОПППСБ (25). БОПППСБ (25) рассчитывает площадь проекции панелей СБ на плоскость, перпендикулярную направлению вектора скорости КА. Рассчитанное значение площади передается на второй вход БОМВУСБТНЗ (22).
В БОМВУСБТНЗ (22) в моменты времени, определенные БОМПМТСБТН (21), осуществляется оценка негативного воздействия ФВС путем сравнения текущего значения характеристики воздействия (а именно, рассчитанной площади проекции панелей СБ) с заданным пороговым значением. Необходимым условием получения команды на выходе БОМВУСБТНЗ (22) является наличие ненулевых сигналов на его обоих входах - с выходов БОМПМТСБТН (21) и БОПППСБ (25).
Реализация БОМВУСБТНЗ (22) возможна как на базе аппаратно-программных средств ЦУП КА, так и на борту КА. На выходе БОМВУСБТНЗ (22) формируется команда "начало управления СБ по токам нагрузки", которая поступает в БУСЭС (16). Когда БОМВУСБТНЗ (22) выдает команду в БУСЭС (16), данная команда является по приоритету более высокой, чем команды на задействование БУОСБС (8) и БРСБЗП (9). Поэтому, получив указанную команду, БУСЭС (16) отключает от управления УПСБ (6) блоки более низкого приоритета и подключает БУСБТНЗ (23).
Примером реализации БУСЭС (16) могут служить радиосредства служебного канала управления (СКУ) бортовыми системами КА "Ямал-100", состоящие из земной станции (ЗС) и бортовой аппаратуры (БА) (см. описание в [10, 11]). В частности, БА СКУ совместно с ЗС СКУ, решает задачи выдачи в бортовую цифровую вычислительную систему (БЦВС) КА цифровой информации (ЦИ) и последующего ее квитирования. БЦВС, в свою очередь, осуществляет управление блоками БУОСБС (8), БРСБЗП (9), БУСБТНЗ (23), БУОСБНС (18), БФКЗ АБ (14). Взаимодействие БА СКУ в части обмена ЦИ осуществляется по магистральному каналу обмена (МКО).
БУСБТНЗ (23) определяет угол γsv_min по формулам (6)-(8). Для расчета указанного угла используются измеренные значения Iн, получаемые соответственно с ДТН (15), и навигационная информация. Кроме того, с ДУ УПСБ (6) в указанный блок поступает информация о текущем значении угла поворота СБ γ (значение γ отсчитывается от заданного нулевого положения нормали до текущей нормали к поверхности СБ). Получив значение угла γsv_min алгоритм, заложенный в указанном блоке, сравнивает его с текущим значением угла γ и получает тем самым угол рассогласования

Далее на выходе блока формируется n управляющих импульсов,

где Δγ - величина дискреты управляющего привода СБ вокруг оси вращения СБ. Формирование управляющих импульсов прекращается при выполнении равенства

БУСБТНЗ (23) является бортовым блоком КА, команды на который приходят от БУСЭС (16). Реализация блока может быть произведена на базе БЦВС. А именно, по радиолинии "Земля-борт" по каналу связи БА СКУ - ЗС СКУ, в БЦВС приходит команда на начало работы алгоритма, заложенного в БУСБТНЗ (23). Далее БЦВС по каналу МКО запрашивает измеренную информацию с ДУ УПСБ (6) и ДТН (15). Рассчитав необходимое число импульсов n в соответствии с выражениями (12), (13), БЦВС по каналу обмена направляет их в УПУ (7). После преобразования и усиления указанных импульсов в УПУ (7) они поступают на вход УПСБ (6) и приводят привод в движение.
После обнуления команды с БОМВУСБТНЗ (22) на входе БУСЭС (16) последний перестраивает логику своей работы. В зависимости от выполняемой программы полета КА управление СБ передается одному из блоков БУОСБС (8), БРСБЗП (9) или БУОСБНС (18).
Когда КА находится в тени Земли, БОМОКА (19) генерирует и подает на вход элемента НЕ (26) сигнал нулевого уровня, элемент НЕ (26) генерирует и подает команду на второй вход БУСЭС (16), по которой БУСЭС (16) передает управление БУОСБНС (18).
По команде с БУСЭС (16) блок БУОСБНС (18) осуществляет управление ориентацией СБ (1) по направлению вектора скорости КА, а именно: ориентирует нормаль к поверхности СБ перпендикулярно направлению вектора скорости КА. БУОСБНС (18) может быть реализован на базе СУДН КА (см. [6]). При этом входной информацией для алгоритма управления СБ являются: положение единичного вектора скорости КА относительно связанных с КА осей координат, определяемое алгоритмами кинематического контура СУДН; положение СБ (1) относительно корпуса КА, получаемое в виде текущих значений угла γ. Выходной информацией алгоритма управления являются команды на вращение СБ по или против часовой стрелки (углы рассогласования Δγv=γv-γ) относительно оси выходного вала УПСБ (6), команды на прекращение вращения. ДУ УПСБ (6) выдают сигналы о положении СБ (1).
Когда КА находится на освещенной части орбиты, БОМОКА (19) генерирует и подает на вход элемента НЕ (26) сигнал об освещенности КА, элемент НЕ (26) обнуляет команду на второй вход БУСЭС (16). Если при этом также обнулена команда с БОМВУСБТНЗ (22) на первый вход БУСЭС (16), последний, в зависимости от выполняемой программы полета КА, передает управление СБ одному из блоков БУОСБС (8), БРСБЗП (9).
По команде с БУСЭС (16) блок БУОСБС (8) осуществляет управление ориентацией СБ (1) на Солнце. БУОСБС (8) может быть реализован на базе СУДЫ КА (см. [6]). При этом входной информацией для алгоритма управления СБ являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат, определяемое алгоритмами кинематического контура СУДН; положение СБ (1) относительно корпуса КА, получаемое в виде текущих измеренных значений угла γ с ДУ УПСБ (6). Выходной информацией алгоритма управления являются команды на вращение СБ (углы рассогласования Δγs=γs-γ) относительно оси выходного вала УПСБ (6), команды на прекращение вращения.
По команде с БУСЭС (16) блок БРСБЗП (9) управляет СБ (1) по программным уставкам. Алгоритм управления СБ (1) по программным уставкам позволяет устанавливать батарею в любое задаваемое положение γz. Выходной информацией алгоритма управления являются команды на вращение СБ (углы рассогласования Δγz=γz-γ) относительно оси выходного вала УПСБ (6), команды на прекращение вращения.
УПУ (7) играет роль интерфейса между БУОСБС (8), БРСБЗП (9), БУОСБНС (18), БУСБТНЗ (23) и УПСБ (6) и служит для преобразования цифровых сигналов в аналоговые и усиление последних.
В описываемой реализации БУСЭС (16) взаимодействие БА СКУ в части обмена ЦИ осуществляется по магистральному каналу обмена (МКО) в соответствии с интерфейсом MIL-STD-1553. В качестве абонента БЦВС используется прибор - блок сопряжения (БС) из состава БА СКУ. Процессор БЦВС периодически делает опросы состояния БС для определения доступности пакета данных. Если пакет доступен, то процессор начинает обмен данными.
Передаваемая информация с Земли проходит сверку адреса в командном интерфейсе БС с адресом полукомплекта БС. При наличии совпадения принятого и "своего" адресов осуществляется дальнейшая обработка информации. Так, после приема информации от наземной аппаратуры и указанной сверки, БС передает в БЦВС ЦИ в виде групп слов данных. В группе может быть от одного до трех активных 16-разрядных слов. Активные слова и содержат необходимую информацию для управляющих алгоритмов БЦВС. В свою очередь, БЦВС со своими внешними абонентами, к которым относится и БКФЗ АБ, осуществляет обмен ЦИ по МКО.
БОМОКА (19), БИУСОВСБ (20) и БИНВС (24) могут быть выполнены на базе датчиков и аппаратуры СУДН КА (см. [6], [13]). БОМПМТСБТН (21) и БОПППСБ (25) могут быть выполнены в виде вычислителя на базе БЦВС. Элемент НЕ (26) может быть выполнен в виде элементарного аналогового элемента "НЕ".
Таким образом, рассмотрен пример реализации основополагающих блоков системы, по результатам которых принимается решение и реализуются предложенные защитные операции.
Опишем технический эффект предлагаемых изобретений.
Большую опасность для СБ КА представляет попадание метеоритов и орбитальных обломков на размещенные на панелях СБ элементы фотопреобразователей. Это может приводить к их повреждению и эффекту "деградации" СБ в полете (см. [2], стр.310-311, стр.264-338; [8], стр.334-336, стр.579-588). Из-за прецессии орбиты КА и наклона плоскости экватора Земли относительно плоскости эклиптики метеоритная среда может оказаться всенаправленной относительно Земли, однако она становится направленной относительно КА, движущегося сквозь нее, - большая часть метеоритов встречается по направлению движения, со стороны скоростного напора, действующего на движущийся по орбите КА (см. [14], раздел 3.8, стр.100, 108). Предлагаемые изобретения позволяют снизить опасность повреждения поверхности СБ в полете КА и тем самым продлить срок эффективной работы СБ.
Согласно правилам управления полетом международной космической станции (МКС) (см. [15], раздел 3.3.12.8; [16], правило В4-152, стр.4-12) текущая высота орбиты МКС должна поддерживаться такой, чтобы при текущем баллистическом коэффициенте МКС высота орбиты МКС не опустилась ниже 278 км в течение последующих 90 суток полета для стадии сборки МКС и 180 суток для послесборочной стадии. Указанные сроки необходимы для гарантированного обеспечения изготовления, запуска и стыковки с МКС транспортных кораблей, обеспечивающих жизнеспособность экипажа МКС. Это означает, что поддерживаемая высота орбиты МКС определяется фактором торможения МКС в атмосфере Земли. В свою очередь, сопротивление атмосферы увеличивается как при увеличении баллистического коэффициента КА, так и при понижении орбиты (поскольку плотность атмосферы Земли увеличивается при приближении к Земле, см. [17]). Более того, в периоды возмущенной атмосферы, когда плотность атмосферы существенно возрастает относительно номинальных прогнозируемых значений, возможны случаи катастрофического понижения орбиты и нарушения указанного требования обеспечения безопасности экипажа и МКС в целом. Предлагаемые изобретения обеспечивают уменьшение баллистического коэффициента КА (в данном случае МКС), что, в свою очередь, уменьшает скорость падения высоты орбиты и позволяет выходить из таких опасных ситуаций и/или экономить энергетические ресурсы на подъем орбиты до уровня, необходимого для обеспечения жизнеспособности и выполнения целевых задач КА.
Наряду с этим, набегающий поток атмосферы создает давление на СБ, в результате которого создается нагрузка на узлы крепления и привода СБ и увеличивается вероятность их поломки (так, в настоящее время существуют проблемы в работе одного из приводов СБ американского сегмента МКС). Предлагаемые изобретения позволяют снизить давление на СБ в полете, чем уменьшить нагрузку на узлы крепления и привода СБ.
Таким образом, технический эффект предлагаемых изобретений заключен в уменьшении степени негативного воздействия набегающего потока на поверхность солнечных батарей. Степень уменьшения указанного негативного воздействия зависит степени уменьшения площади проекции панелей солнечных батарей на плоскость, перпендикулярную вектору скорости КА. Предлагаемые изобретения обеспечивают максимально возможное уменьшение данного негативного воздействия на освещенной части витка орбиты и полностью исключают указанное негативное воздействие на теневом участке орбиты КА.
ЛИТЕРАТУРА
1. Елисеев А.С. Техника космических полетов. М.: Машиностроение, 1983.
2. Раушенбах Г. Справочник по проектированию солнечных батарей. М.: Энергоатомиздат, 1983.
3. Правила полета при выполнении совместных операций ШАТТЛА и МКС. Том С. Управление полетных операций. Космический центр им. Линдона Б.Джонсона. Хьюстон, Техас, основной вариант, 8.11.2001.
4. Система электроснабжения КА. Техническое описание. 300ГК.20Ю. 0000-АТО. РКК "Энергия", 1998.
5. Центер Б.И., Лызлов Н.Ю., Металлводородные электрохимические системы. Ленинград. "Химия", Ленинградское отделение, 1989.
6. Система управлением движением и навигации КА. Техническое описание. 300ГК.12Ю. 0000-АТО. РКК "Энергия", 1998.
7. Гальперин Ю.И., Дмитриев А.В., Зеленый Л.М., Панасюк Л.М. Влияние космической погоды на безопасность авиационных и космических полетов. "Полет 2001", стр.27-87.
8. Модель космоса. Том 2. НИИЯФ МГУ, 1983.
9. Грилихес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. Москва. "Наука", 1984.
10. Земная станция служебного канала управления КА "Ямал". Руководство по эксплуатации. ЗСКУГК. 0000-ОРЭ. РКК "Энергия", 2001.
11. Бортовая аппаратура служебного канала управления КА "Ямал". Техническое описание. 300ГК.15Ю. 0000А201-ОТО. РКК "Энергия", 2002.
12. Ковтун B.C., Соловьев С.В., Заикин С.В., Городецкий А.А. Способ управления положением солнечных батарей космического аппарата и система для его осуществления. Патент РФ 2242408 по заявке 2003108114/11 от 24.03.2003 г.
13. Инженерный справочник по космической технике. Изд-во МО СССР, М., 1969.
14. Объединенный документ НАСА/РКА по спецификациям и стандартам для Российского сегмента МКСА. Программа Международная космическая станция. SSP 50094. Редакция А, март 2000.
15. Спецификация Российского сегмента. Программа Международная космическая станция. SSP 41163. Редакция Н, 27.01.2001.
16. Общие правила полета по операциям МКС. Том В. Управление полетных операций. NSTS-12820. Космический центр им. Линдона Б.Джонсона. Хьюстон, Техас, основной вариант, 09.10.2001.
17. ГОСТ 25645.115-84. Модель плотности атмосферы для баллистического обеспечения полетов искусственных спутников Земли.



Изобретения относятся к энергоснабжению космических аппаратов (КА). Предлагаемый способ включает разворот панелей солнечных батарей (СБ) в рабочее положение, когда нормаль к освещенной поверхности СБ совмещена с плоскостью, образуемой осью вращения СБ и направлением на Солнце. При этом определяют начало негативного воздействия набегающего потока на рабочую поверхность СБ, разворачивают панели СБ до этого момента времени и возвращают СБ в рабочее положение по окончании данного воздействия. В моменты освещенности КА Солнцем измеряют угол между направлением на Солнце и направлением оси вращения панелей СБ. В моменты превышения максимально возможным током от СБ значения тока нагрузки измеряют направление вектора скорости КА и определяют площадь проекции панелей СБ на плоскость, перпендикулярную этому вектору. Если данная площадь превышает ее пороговое значение, панели СБ разворачивают на угол, соответствующий минимальному воздействию на них набегающего потока, при одновременном обеспечении КА электроэнергией. Во время нахождения КА в тени Земли разворачивают панели СБ, совмещая их плоскость с вектором скорости КА. Предлагаемая система содержит необходимые для управления положением СБ приводы и блоки, причем в нее введены блок определения моментов освещенности КА, блок измерения угла между направлением на Солнце и направлением оси вращения СБ, блок определения моментов времени превышения максимальным током от СБ тока нагрузки. Также предусмотрены блок измерения направления вектора скорости КА, блок определения площади проекции панелей СБ на плоскость, перпендикулярную вектору скорости КА, и блок управления ориентацией СБ по направлению вектора скорости КА. Технический результат изобретений состоит в уменьшении отрицательного воздействия набегающего потока на поверхности СБ. 2 н.п. ф-лы, 4 ил.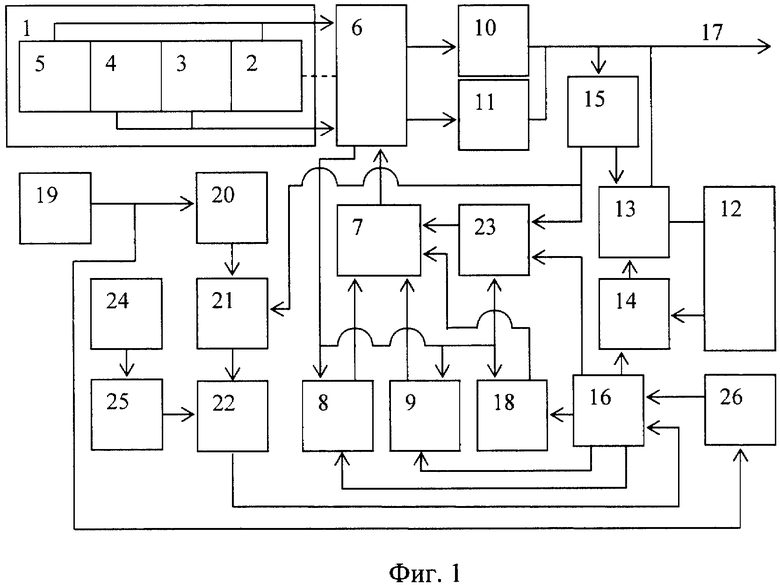
Δγsv_min=min{arccos(Iн/(ImsinδSL)), arccos(sinδSV)},
где Iн - ток нагрузки от потребителей космического аппарата;
Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам;
δSL - угол между направлением на Солнце и направлением оси вращения панелей солнечных батарей;
δSV - угол между проекциями направлений на Солнце и вектора скорости космического аппарата на плоскость, перпендикулярную оси вращения панелей солнечных батарей,
причем за момент времени начала разворота панелей солнечных батарей принимают момент времени превышения определяемым значением площади проекции панелей солнечных батарей порогового значения, а за момент времени начала возвращения панелей солнечных батарей в рабочее положение принимают момент времени, при котором определяемое значение площади проекции панелей солнечных батарей становится ниже порогового значения, при этом в моменты нахождения космического аппарата в тени Земли производят разворот панелей солнечных батарей в положение, соответствующее параллельности вектора скорости космического аппарата плоскости панелей солнечных батарей.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| US 6227497 A, 08.05.2001 | |||
| US 5653407 A, 05.08.1997 | |||
| US 5257759 A, 02.11.1993. | |||

