Изобретение относится к стационарному эргометрическому тренажеру.
Изобретение также относится к способу работы стационарного эргометрического тренажера и к компьютерной программе или программному продукту.
В соответствии с первым аспектом изобретения предлагается стационарный эргометрический тренажер, содержащий:
привод для ног, содержащий поочередно функционирующие элементы привода в виде педалей для ног, установленных с помощью шатунов педалей на противоположных сторонах ведущего колеса;
маховик, соединенный с ведущим колесом посредством зубчатого механизма, причем маховик содержит магнитный обод;
тормозное устройство в виде одного или нескольких постоянных магнитов, установленных с возможностью перемещения с помощью двигателя по направлению к магнитному ободу маховика и в направлении от магнитного обода маховика, что позволяет избирательно регулировать тормозное усилие, приложенное к маховику, путем воздействия каждого из постоянных магнитов;
измерительный блок для измерения, при его использовании, по меньшей мере, одного из приводных усилий, которое прикладывается посредством привода, и связанного с ним момента силы;
измерительное устройство для измерения частоты педалирования при использовании тренажера;
управляющий модуль, подключенный к измерительному блоку, измерительное устройство и двигатель тормозного устройства; а также
коммуникационный модуль, связанный с управляющим модулем и сконфигурированный для приема управляющих сигналов и передачи этих управляющих сигналов управляющему модулю и сконфигурированный для передачи сигналов обратной связи, принятых от управляющего модуля, которые включают информацию об эффективности работы пользователя,
Причем управляющий модуль сконфигурирован для получения результатов измерений от измерительного блока и измерительного устройства и для применения этих результатов измерений при вычислении одного или нескольких параметров производительности и для сравнения их или каждого параметра производительности с заданным профилем рабочих характеристик и для управления двигателем, который перемещает каждый из постоянных магнитов относительно магнитного обода маховика, чтобы отрегулировать тормозное усилие, приложенное каждым постоянным магнитом, и тем самым настроить результаты измерений, полученные от измерительного блока и измерительного устройства, чтобы отрегулировать их или каждый параметр производительности, рассчитанный управляющим модулем так, чтобы соблюдалось соответствие с предварительно определенным профилем рабочих характеристик.
В контексте изобретения термин «частота педалирования» предназначен для обозначения скорости педалирования пользователя, которая обычно рассчитывается как число оборотов педалей за минуту.
Понятно, что наличие тормозного устройства, включающего в себя один или несколько постоянных магнитов, перемещающихся относительно магнитного обода маховика, формирует механизм, посредством которого можно прилагать усилие, направленное на сопротивление вращению маховика. В то время как величина магнитной силы, создаваемой постоянным магнитом или каждым из постоянных магнитов, остается неизменной, способность перемещать каждый из постоянных магнитов в направлении маховика и в противоположную от маховика сторону обеспечивает наличие тормозного усилия, приложенного к маховику, и, следовательно, силы, которые препятствуют вращению маховика, изменяются и регулируются.
Использование двигателя для перемещения постоянных магнитов по отдельности или в совокупности относительно магнитного обода маховика облегчает дистанционное управление тормозным устройством и устраняет необходимость ручной регулировки положений каждого из постоянных магнитов относительно магнитного обода маховика. Это, в свою очередь, позволяет влиять на тормозное усилие, изменять и регулировать его величину, применяемую к маховику, причем тут же, в соответствии с измерениями, поступающими из измерительного блока и измерительного устройства, что позволяет на постоянной основе регулировать положение тормозного устройства относительно магнитного обода маховика при использовании стационарного эргометрического тренажера.
Использование одного или нескольких постоянных магнитов особенно удобно вследствие того, что заявителем обнаружено, что величина магнитной силы, создаваемой постоянным магнитом на единицу массы, значительно больше, чем величина силы, которая может быть получена при использовании электромагнита.
Соответственно, можно легко увеличивать магнитную силу, создаваемую тормозным устройством, подключая дополнительные постоянные магниты, размеры которых относительно невелики. В свою очередь, подобный подход существенно расширяет диапазон регулирования полученного тормозного устройства, позволяя создавать гораздо больший диапазон тормозных усилий, доступных при взаимодействии тормозного устройства и магнитного обода маховика. Это, в свою очередь, означает, что использование одного или нескольких постоянных магнитов позволяет сформировать более универсальное устройство, которое будет обладать меньшим весом, чем при достижении аналогичного результата с помощью электромагнита.
Использование одного или нескольких постоянных магнитов также снижает потребление энергии, которое требует устройство, по сравнению с тормозным устройством, использующим электромагнит. Общая мощность, которая необходима двигателю, управляющему модулю и коммуникационному модулю, такова, что стационарное эргометрический тренажер может получать питание от батареи, а не от мощного источника питания, например, от розетки электропитания, которая наверняка потребуется при организации электроснабжения устройства, использующего электромагнит, способный создавать аналогичный диапазон тормозных усилий.
Предоставление управляющего модуля, сконфигурированного описанным выше способом, также позволяет задавать заранее определенный профиль рабочих характеристик пользователя для конкретной программы обучения или упражнений. Управляющий модуль, в свою очередь, в режиме реального времени собирает данные и сравнивает их с заданным профилем рабочих характеристик, управляет двигателем для регулировки тормозного усилия, приложенного к маховику, что влияет на сопротивление вращению маховика и, следовательно, сопротивление педалированию, которое выполняет пользователь в режиме реального времени. Как указано выше, путем соответствующей регулировки положения тормозного устройства относительно магнитного обода маховика управляющий модуль способен настраивать результаты измерений, полученные от измерительного блока и измерительного устройства для регулировки каждого параметра производительности, рассчитанного модулем управления, что обеспечивает соответствие со значениями, указанными в предварительно определенном профиле рабочих характеристик пользователя.
Простейшим образом заданный пользователем профиль рабочих характеристик может быть настроен таким образом, что гарантируется управление пользователем устройством при постоянной выходной мощности. Этого можно достичь путем измерения частоты педалирования, величины сил и/или крутящего момента при вычислении фактической выходной мощности пользователя, сравнении вычисленной мощности с заданным значением выходной мощности и управления двигателем так, чтобы тормозное усилие увеличивалось или уменьшалось, чтобы от пользователя требовалось применять большую или меньшую силу при вращении педалей для достижения нужной выходной мощности при той же частоте вращения педалей.
При таком режиме работы управляющий модуль может регулировать силу торможения, когда частота педалирования пользователя изменяется для увеличения или уменьшения тормозного усилия, приложенного к маховику с магнитным ободом, и, следовательно, от пользователя потребуется увеличения или уменьшения приводного усилия, применяемого к педалям для поддержания одного у того же уровня мощности.
Возможность со стороны управляющего модуля контролировать уровень производительности пользователя на основе результатов измерений, полученных от измерительного устройства и измерительного блока, означает, что управляющий модуль может неоднократно регулировать положение тормозного устройства относительно магнитного обода маховика во время непрерывной работы тренажера для создания тормозного усилия, которое дает возможность пользователю достичь нужного значения выходной мощности при удобной для него частоте педалирования.
Способность регулировать выходную мощность пользователя особенно полезна для медицинских или лабораторных целей при проведении оценивания, когда особенно важно, чтобы пользователь мог крутить педали с постоянной выходной мощностью, а частота педалирования и/или сила, применяемая к педалям, не имеют большого значения для целей подобного оценивания.
Понятно, что заданный профиль рабочих характеристик пользователя может быть адаптирован для формирования различных эффектов. Например, в другом режиме работы профиль рабочих характеристик может быть настроен таким образом, чтобы устанавливать соотношение между выходной мощностью и частотой вращения для конкретной передачи. Это приведет к нелинейной зависимости между выходной мощностью и частотой педалирования.
В таком режиме работы управляющий модуль может снова применять измерения частоты педалирования, силы и/или крутящего момента для вычисления фактической выходной мощности пользователя и затем сравнивать эти значения с конфетной нелинейной зависимостью между выходной мощностью и частотой педалирования. Затем управляющий модуль может приводить в действие двигатель, который перемещает тормозное устройство в направлении магнитного обода маховика или в противоположном от маховика направлении, что увеличивает или уменьшает тормозное усилие и тем самым уменьшает или увеличивает, соответственно, усилие, которое требуется от пользователя для поддержания частоты педалирования и, таким образом, достигается выходная мощность, соответствующая данной частоте педалирования для заранее определенного профиля рабочих характеристик.
Наличие коммуникационного модуля, подключенного к управляющему модулю и сконфигурированного для приема управляющих сигналов и передачи сигналов обратной связи, сообщающих о производительности пользователя, позволяет подключать стационарный эргометрический тренажер к внешнему устройству для поддержки интерфейса пользователя.
Предполагается, например, что коммуникационный модуль может быть подключен к смартфону, планшету, смарт-часам или другому вычислительному устройству, на котором запущено приложение, настроенное для связи с коммуникационным модулем, и тем самым разрешая пользователю вводить данные для создания предопределенного профиля рабочих характеристик. Также можно подключаться к устройству для визуализации сигналов обратной связи на экране устройства. Интерфейс может, например, отображать результаты измерения частоты педалирования и/или величины силы. Также может в качестве альтернативы отображаться один или несколько параметров производительности, вычисленных управляющим модулем на основе измерений, полученных от измерительного устройства и измерительного блока.
Для проведения точных и реальных измерений измерительный блок может быть сконфигурирован так, чтобы измерения проводить непрерывно, применяя, по крайней мере, одно приводное усилие, приложенное через привод, и связанный с ним вращающий момент. При непрерывной работе предполагается, что измерительный блок может измерять силу, приложенную к приводу и/или связанный с ним крутящий момент до 100 раз в секунду.
В подобных вариантах реализации непрерывный мониторинг приводного усилия и/или связанного с ним крутящего момента, позволяет управляющему модулю непрерывно пересчитывать один или несколько параметров производительности для сравнения с заданным профилем рабочих характеристик. Соответственно, управляющий модуль может регулировать двигатель так, чтобы позволить выполнять регулировку тормозного усилия, формируемого тормозным устройством.
В вариантах реализации изобретения, для которых управляющий модуль сконфигурирован для вычисления выходной мощности пользователя, управляющий блок может конфигурироваться для вычисления выходной мощности пользователя один раз за оборот шатунов педалей. Для подобных вариантов реализации управляющий модуль может вычислять мощность усилий на основе следующей формулы:
мощность = усилие × скорость
Это позволяет управляющему модулю контролировать работу двигателя для динамического и быстрого реагирования на движение или воздействия каждого из постоянных магнитов.
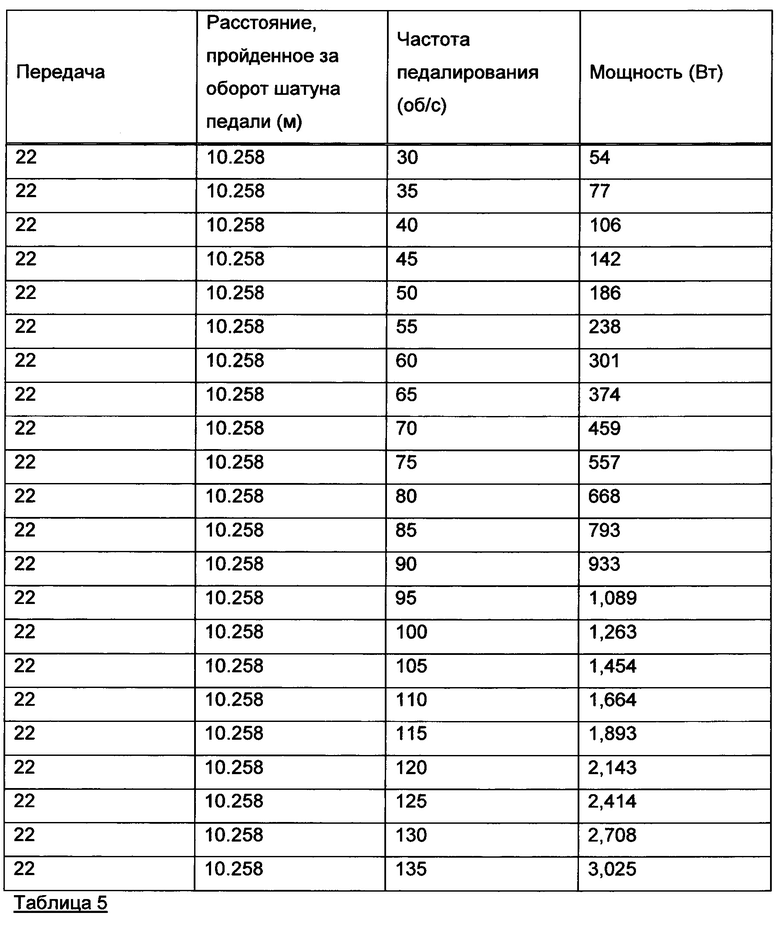
При определении мощности управляющий модуль вычисляет скорость по отношению к измеренной частоте педалирования и расстоянию, которое подсчитывается на основании количества оборотов шатунов педали. Расстояние, определяемое на основе количества оборотов шатунов педалей, может предварительно устанавливаться в управляющем модуле в соответствии с рядом заранее установленных передач. В подобных вариантах реализации изобретения управляющий модуль может конфигурироваться так, что приложенные к маховику силы торможения возрастают при выборе пользователем более высокой передачи, и, наоборот, тормозные усилия уменьшаются в случае выбора более низкой передачи для имитации реальных сил сопротивления, которые обычно приходится преодолевать велосипедисту при переключении передач на настоящем велосипеде. Аналогично, управляющий модуль может конфигурироваться таким образом, что пройденное за оборот педалей расстояние будет увеличиваться поступательно с каждой передачей - от самой низкой до самой высокой, и наоборот.
В особенно предпочтительном варианте реализации изобретения расстояние, пройденное за один оборот педалей, увеличивается постепенно, от минимального значения, равного 2,790 м для нижней передачи, передача 1 до максимального значения, равного 10,258 м для верхней передачи, передача 22. В подобном варианте реализации изобретения понятно, что пользователь тренажера в случае выбора передачи 1 при частоте педалирования, равной 60 оборотов в минуту, будет имитировать перемещение со скоростью, равной 2,790 м/с.
Чтобы разрешать пользователю изменять передачи, тренажер может содержать кнопки на ручках руля, что обеспечит пользователю возможность легко изменять передачи, полностью имитируя езду на настоящем велосипеде. Подобные кнопки могут подключаться к управляющему модулю для поддержки необходимого сигнала. В качестве альтернативы, кнопки могут быть выполнены с возможностью передачи управляющих сигналов коммуникационному модулю, для последующей их передачи управляющему модулю.
В элементарных вариантах реализации изобретения предполагается, что управляющий модуль может программироваться на включение ряда предопределенных профилей рабочих характеристик, среди которых пользователь делает выбор до начала работы на тренажере. Однако для особенно предпочтительных вариантов изобретения, предполагается, что управляющий модуль может конфигурироваться для вычисления заранее определенного профиля рабочих характеристик при получении данных в виде управляющих сигналов от коммуникационного модуля, характеризующих эффективность работы.
Например, для подобных вариантов реализации изобретения пользователь может ввести последовательность параметров велопоездки, которые, в свою очередь, передаются управляющему модулю через коммуникационный модуль и позволяют управляющему модулю вычислять заданный заранее профиль рабочих характеристик на основе выбранных параметров велопоездки.
Предусмотрено, что данные, характеризующие эффективность работы, выполняемой пользователем тренажера, могут включать информацию, относящуюся к одному или нескольким параметрам велопоездки, выбранным из группы, куда входит значение угла наклона поверхности трассы для езды на велосипеде, сопротивления качению между шинами велосипеда и поверхностью трассы, масса велосипедиста, масса велосипеда и развиваемая велосипедистом мощность.
Также предполагается, что данные характеризующие эффективность работы, выполняемой пользователем тренажера, могут включать информацию, касающуюся одного или нескольких параметров динамики велопоездки, которые выбираются из группы, включающей значения сопротивления воздуха в зависимости от скорости ветра, сопротивления воздуха, возникающего вследствие перепадов высоты и сопротивления потока воздуха, который создается вентилятором.
В подобных вариантах реализации изобретения управляющий модуль может быть сконфигурирован для вычисления влияния эффектов, производимых любыми выбранными параметрами велопоездки на силу лобового сопротивления, которой будет подвержен велосипедист в этих условиях и для вычисления заранее определенного профиля рабочих характеристик велопоездки с учетом дополнительной силы лобового сопротивления. Управляющий модуль может, например, генерировать заранее определенный профиль рабочих характеристик велопоездки на основе выходной мощности по сравнению с частотой педалирования, которая рассчитана с учетом силы лобового сопротивления, которая будет иметь место при выбранных значениях параметров велопоездки. Это позволило бы управляющему модулю контролировать двигатель и тем самым управлять движением тормозного устройства относительно магнитного обода маховика, для создания необходимой величины силы лобового сопротивления и, таким образом, имитировать различные условия велопоездки.
Понятно, что путем соответствующего отбора параметров велопоездки пользователь тренажера может формировать управляющие сигналы для инструктирования управляющего модуля по поводу имитации множества комбинаций из возможных условий велопоездки. Например, управляющий модуль может моделировать вариант некрупного велосипедиста, пользующегося легким велосипедом на велодроме; того же велосипедиста, но уже перемещающегося на велосипеде уже по грунтовой дороге; того же велосипедиста и велосипед, перемещающихся по наклонной поверхности, причем величина наклона составляет 5°; того же велосипедиста и велосипед, перемещающихся по наклонной поверхности с углом наклона, равным -5°, при наличии попутного ветра со скоростью 10 миль в час. Управляющий модуль может имитировать стационарный эргометрический тренажер, имеющий вентилятор с вентиляционными отверстиями на внешнем корпусе вентилятора, который можно регулировать таким образом, чтобы он занимал различные положения и тем самым изменял проходящий через вентилятор воздушный поток и управлял им, при вращении педали с целью поворота вентилятора.
Что касается упомянутых выше параметров динамики велопоездки, то понятно, что сила сопротивления, испытываемая велосипедистом в подобных условиях, будет варьироваться в зависимости от скорости потока воздуха.
Соответственно, в особенно предпочтительных вариантах реализации изобретения управляющий модуль может конфигурироваться для вычисления фактической скорости велосипеда на основе частоты педалирования, которая измеряется специальным устройством, и расстояния, которое проходится за один оборот шатунов педали, как описано выше.
В других подобных вариантах реализации изобретения управляющий модуль может быть сконфигурирован для использования результатов измерений, полученных от измерительного блока, для расчета скорости вращения маховика.
В любом случае управляющий модуль может конфигурироваться для использования вычисленной скорости, что позволит настроить заданный профиль рабочих характеристик велопоездки, отражая влияние скорости велосипедиста на один или несколько параметров динамики велопоездки, которые используются при вычислении заранее заданного профиля рабочих характеристик.
Предполагается, что для ввода выбранных параметров велопоездки пользователь тренажера подключит к коммуникационному модулю стационарного эргометрического тренажера внешнее устройство, например, смартфон, планшет, смарт-часы или другое вычислительное устройство.
Для вариантов реализации изобретения подобное соединение может достигаться посредством проводного соединения. В подобных вариантах реализации изобретения кабель для передачи данных, например, USB-кабель, может соединять разъемы внешнего устройства и коммуникационного модуля.
Для других вариантов реализации изобретения подобное соединение может достигаться посредством включения в коммуникационный модуль радиомодуля, сконфигурированного для приема управляющих сигналов и передачи сигналов обратной связи по протоколу беспроводной связи. Например, радиомодуль может быть сконфигурировано для формирования сопряженного соединения с внешним устройством с помощью канала связи BLUETOOTH ® или ANT+®.
Понятно, что другие протоколы беспроводной связи также могут применяться для формирования линии беспроводной связи между коммуникационным модулем и внешним устройством, таким как смартфон, планшет, смарт-часы или другое вычислительное устройство в зависимости от функциональности, доступной для внешнего устройства, и функциональных возможностей радиомодуля, установленного в коммуникационном модуле.
Предусматривается, что в особенно предпочтительных вариантах реализации изобретения внешнее устройство включает данные, относящиеся к маршруту велопоездки, которые могут применяться для генерирования управляющих сигналов при имитации конкретного маршрута движения для велосипеда. Данные могут, например, относиться к определенному этапу Тур де Франс или маршруту олимпийской трассы.
В подобных вариантах реализации изобретения управляющий модуль конфигурироваться для формирования заранее заданного профиля рабочих характеристик велопоездки на основе управляющих сигналов, относящихся к характеристикам выбранного маршрута. Подобные характеристики могут включать угол наклона, сопротивление качению между шинами велосипеда и поверхностью трассы и высоту поездки. Сюда также входит скорость и направление ветра, а также другие метеорологические характеристики, особенно, если пользователь пожелает имитировать условия ранее записанной велопоездки по выбранному маршруту.
В процессе моделирования управляющий модуль вычисляет мощность, развиваемую пользователем тренажера в соответствии с описанными выше способами, и сравнивает с заданным профилем рабочих характеристик велопоездки для определения выходной мощности, которая нужна для поддержания измеренной частоты педалирования пользователя тренажера. Затем управляющий модуль регулирует тормозное усилие, прилагаемое к маховику, приводя в соответствие с результатами измерений, поступившими от измерительного блока и измерительного устройства, для достижения требуемой выходной мощности и, таким образом, имитируется сопротивление педалированию, которое будет испытывать пользователь тренажера при данной частоте педалирования, при выборе определенной передачи и при данном местоположении на маршруте, где в данный момент находится пользователь.
Понятно, что данные относительно выбранного маршрута могут предоставляться как однократная передача данных от внешнего устройства через коммуникационный модуль. Однако, возможно, что данные могут непрерывно передаваться от внешнего устройства управляющему модулю через коммуникационный модуль при моделировании выбранного маршрута, что обеспечит поступление большего количества данных и, таким образом, будет способствовать постоянной корректировке предопределенного профиля рабочих характеристик велопоездки, что приведет к более точному моделированию велопоездки.
В любом случае управляющий модуль передает сигналы обратной связи через коммуникационный модуль обратно, внешнему устройству, которые позволяет внешнему устройству отслеживать перемещение пользователя по выбранному маршруту. Затем эти данные преобразуются в сигнал внешнего устройства, который позволяет внешнему устройству генерировать видеоизображение, обеспечивающее пользователю тренажера визуализировать поездку по выбранному маршруту.
Для контроля над движением одного или каждого из постоянных магнитов относительно магнитного обода маховика один или каждый постоянный магнит может быть установлен на соединенном с двигателем элементе кривошипа, для направления движения кривошипа в направлении магнитного обода маховика или от него и, таким образом, один или каждый из постоянных магнитов перемещается в направлении магнитного обода маховика или в противоположном направлении.
Предусматривается, что в вариантах реализации изобретения маховик может быть выполнен из стали с медной вставкой вокруг внешней кромки, которая формирует секцию магнитного обода.
В особенно предпочтительных вариантах реализации маховик содержит пару элементов колеса, установленных на общей оси вращения. Для таких вариантов реализации изобретения каждый из элементов колеса содержит магнитный обод, а тормозное устройство содержит два набора постоянных магнитов, причем каждый из наборов постоянных магнитов установлен для перемещения вместе с другим набором постоянных магнитов в направлении магнитного обода соответствующего колесного элемента или в противоположном направлении.
Как указано выше, стационарный эргометрический тренажер, согласно изобретению, включает измерительный блок для измерения приводного усилия, которое приложено через привод и/или связанный с ним вращающий момент. В особенно предпочтительных вариантах реализации стационарный эргометрический тренажер содержит измерительный блок для измерения приводного усилия, поступающего через привод. Для подобных вариантов реализации изобретения измерительный блок содержит рычаг, приложенный к цепи зубчатого механизма, причем рычаг слегка прижимается сбоку цепи, измерительный блок дополнительно содержит измерительный датчик для измерения восстанавливающей силы, прилагаемой к рычагу тяговым механизмом.
Для вычисления сигналов обратной связи, указывающих на производительность пользователя тренажера, управляющий модуль может выполняться с возможностью расчета и непрерывного вывода в виде сигналов обратной связи в коммуникационный модуль временных изменений приводного усилия и/или связанного с ним вращающего момента, а также получаемых из него переменных, на основе результатов измерений, переданных управляющему модулю измерительным блоком.
Чтобы измерить частоту педалирования, измерительное устройство может содержать пару частей датчика, прикрепленных к ведущему колесу и, по меньшей мере, один датчик в неподвижном положении относительно ведущего колеса.
Для других подобных вариантов реализации изобретения измерительное устройство может содержать пару датчиков, расположенных в неподвижных, относительно ведущего колеса, местоположениях и, по меньшей мере, одну часть датчика, крепящуюся к ведущему колесу.
В любом случае каждый датчик или часть датчика перемещаются вместе с ведущим колесом относительно другого датчика при работе привода, посредством чего датчик и обнаруживает перемещающуюся часть датчика и, следовательно, может вычислять скорость вращения приводного колеса а, следовательно, и величину частоты педалирования пользователя тренажера.
При соответствующем позиционировании части датчика или каждой части датчика и другого датчика, датчик обнаруживает перемещающуюся часть датчика, когда шестерня находится в одном из двух определенных угловых положений, причем положения отстоят на 180° друг от друга и соответствуют в движении позициям чередования нагрузки между поочередно управляемыми элементами привода.
Предпочтительно, каждая часть датчика является магнитом и/или каждый датчик является датчиком магнитного поля.
Возможность идентификации позиций чередования нагрузки при движении разрешает измерительному устройству идентифицировать время чередования нагрузки между поочередно управляемыми приводными элементами. Для подобных вариантов реализации изобретения управляющий модуль может дополнительно конфигурироваться таким образом, чтобы принимать сигналы от измерительного устройства, идентифицируя время чередования нагрузки между поочередно управляемыми приводными элементами, и, используя время чередования нагрузки, идентифицированное измерительным устройством, для распределения вычисляемых значений переменных на основе измерений, полученных от измерительного блока, попеременно, для и левой и правой конечностей пользователя тренажера.
Подобная информация может передаваться через коммуникационный модуль внешнему устройству с дисплеем POLAR VIEW™, которое иллюстрирует эффективность и технику педалирования пользователя при конкретной ссылке на правую и левую конечности пользователя и, таким образом, разрешает пользователю уточнять области, где эффективность работы и/или техника педалирования могут нуждаться в улучшении.
Для второго аспекта изобретения предлагается такой режим работы стационарного эргометрического тренажера, куда входит ножной привод для работы, включающий поочередно действующие приводные элементы в виде педалей, которые устанавливаются помощью шатунов на противоположных сторонах шестерни; маховик, соединенный с шестерней через зубчатый механизм, маховик содержит магнитный обод; тормозное устройство в виде одного или нескольких постоянных магнитов, установленных для перемещения с помощью двигателя в направлении магнитного обода маховика и в противоположном направлении, что позволяет избирательно регулировать тормозное усилие, приложенное к маховику, посредством постоянного магнита или каждого из постоянных магнитов; измерительный блок для измерения, при использовании, по меньшей мере, одного из приводных усилий, прилагаемых через привод, а также связанного с ним вращающего момента; и измерительный блок для измерений, режимов использования, частоты педалирования.
Причем данный режим применения включает следующие этапы:
использование результатов измерений, полученные от измерительного блока и измерительного устройства, для расчета одного или нескольких параметров эффективности работы;
сравнение всех параметров эффективности работы или каждого из параметров эффективности с заданным профилем рабочих характеристик; а также
управление двигателем для перемещения одного или каждого из постоянных магнитов относительно магнитного обода маховика для регулировки тормозного усилия, прилагаемого постоянным магнитом, что приводит к настройке измерений, полученных от измерительного блока и измерительного устройства и, таким образом, к реализации настройки параметров или каждого параметра эффективности, вычисленного управляющим модулем в соответствии с заданным профилем рабочих характеристик.
Для вариантов реализации изобретения режим способ может дополнительно включать ввод данных, характеризующих эффективность работы, и вычисления заранее определенного профиля рабочих характеристик на основе данных, характеризующих эффективность работы.
Данные характеризующие эффективность работы, включают информацию, относящуюся к одному или нескольким параметрам статического аспекта велопоездки, выбранным из группы, состоящей из угла наклона поверхности трассы, сопротивления качению между шинами и поверхностью трассы, массы велосипедиста, массы велосипеда, выбора шестерни передачи и величины выходной мощности велосипедиста.
Данные характеризующие эффективность работы, включают информацию, относящуюся к одному или нескольким параметрам динамического аспекта велопоездки, выбранным из группы, состоящей из сопротивления воздуха, создаваемого изменениями скорости ветра, сопротивления воздуха, создаваемого изменениями высоты, сопротивления воздуха, создаваемого вентилятором.
Предпочтительно, данный режим дополнительно включает этап вычисления скорости вращения маховика с использованием измерений, полученных от измерительного устройства, и этап настройки заданного профиля рабочих характеристик в ответ на вычисленное значение скорости, что отражает влияние скорости на один или несколько параметров из динамических параметров велопоездки.
Согласно третьему аспекту изобретения предоставляется компьютерная программа или компьютерный программный продукт, содержащий программный код, который при выполнении на компьютере реализует режим работы описанного выше стационарного эргометрического тренажера.
Предпочтительные варианты реализации изобретения описываются с помощью неограничивающих примеров со ссылкой на прилагаемые фигуры, на которых:
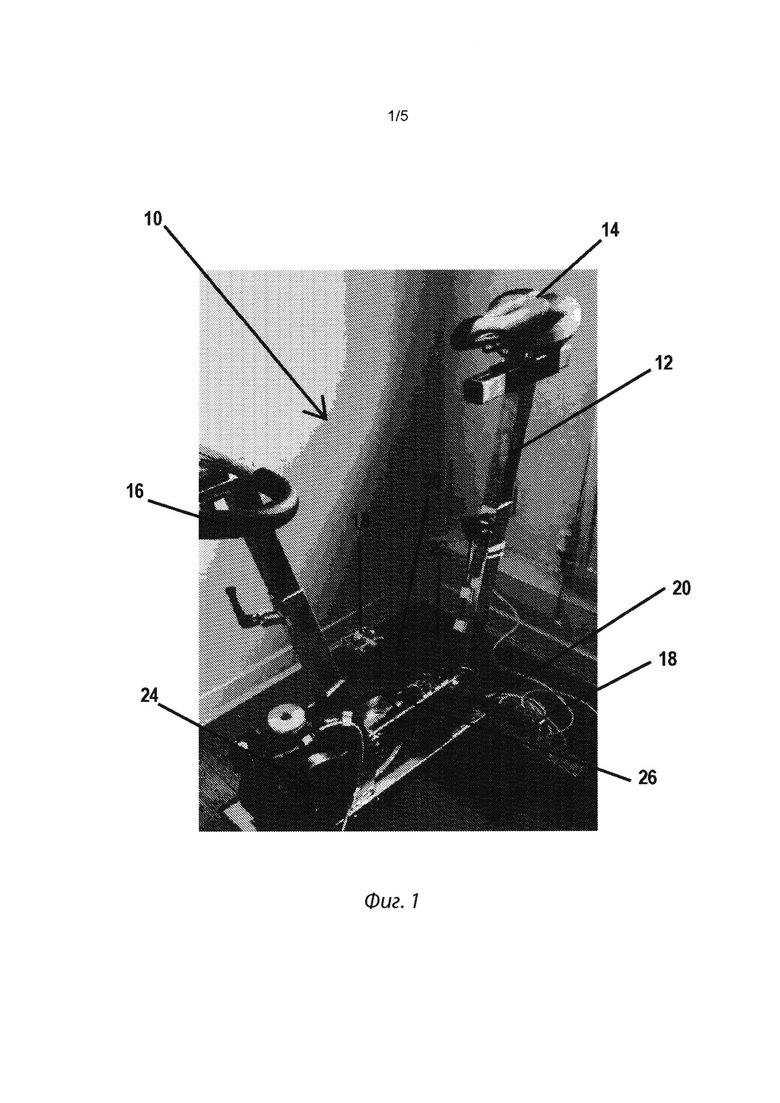
на Фиг. 1 проиллюстрирован стационарный эргометрический тренажер в соответствии с вариантом реализации изобретения;
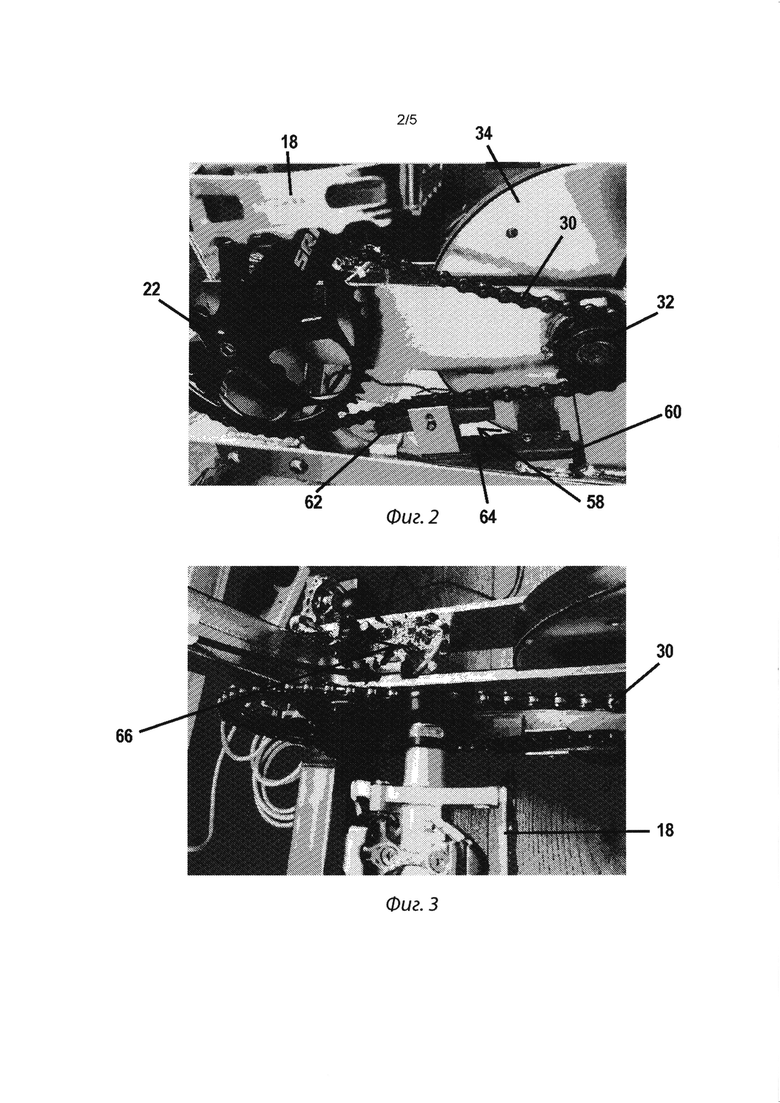
на Фиг. 2 проиллюстрировано измерительное устройство стационарного эргометрического тренажера, проиллюстрированного на Фиг. 1;
на Фиг. 3 проиллюстрирован измерительный модуль стационарного эргометрического тренажера, проиллюстрированного на Фиг. 1;
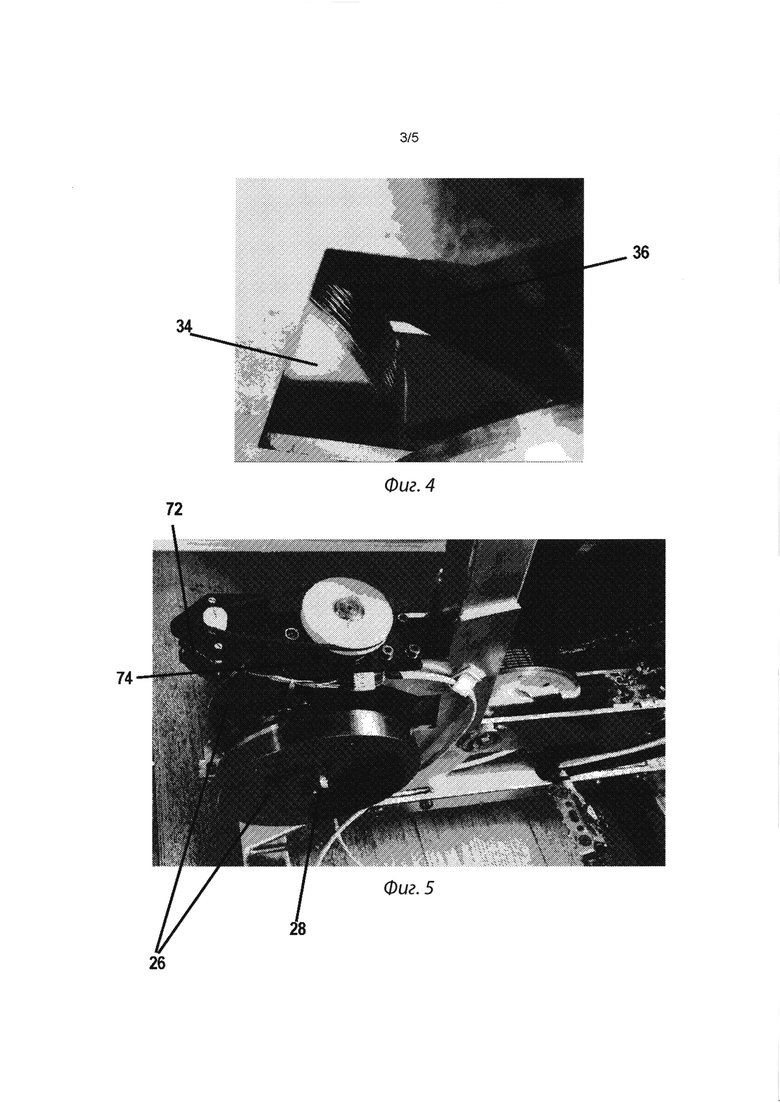
на Фиг. 4 проиллюстрирован зубчатый механизм, соединяющий ведущее колесо с маховиком стационарного эргометрического тренажера, проиллюстрированного на Фиг. 1;
на Фиг. 5 проиллюстрировано тормозное устройство и маховик стационарного эргометрического тренажера;
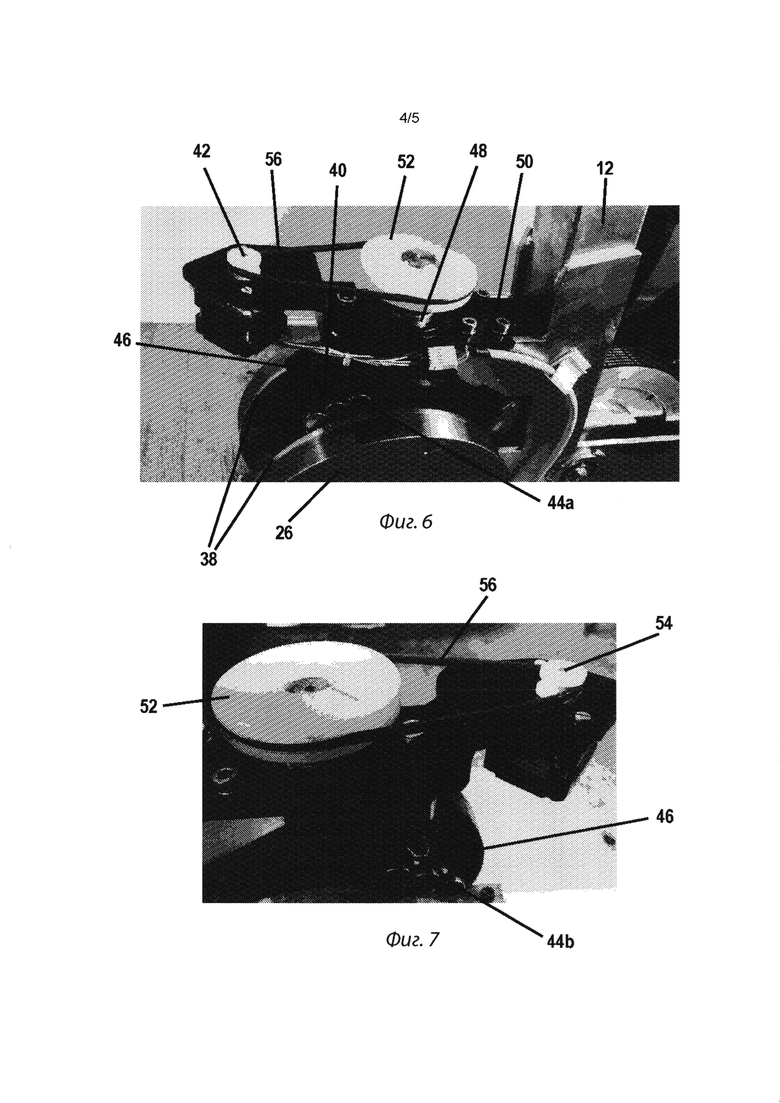
на Фиг. 6 и Фиг. 7 проиллюстрированы управляющий модуль и двигатель, предназначенные для управления перемещением относительно магнитного обода маховика в маховике тормозного устройства;
на Фиг. 8 проиллюстрирован пример модели POLAR VIEW™; а также
на Фиг. 9 и Фиг. 10 проиллюстрированы схематические изображения измерительного блока, проиллюстрированного на Фиг. 3.
На Фиг. 1 проиллюстрирован стационарный эргометрический тренажер 10 согласно варианту реализации изобретения.
Стационарный эргометрический тренажер 10 можно использовать, например, в качестве домашнего тренажера, в качестве тренажера в фитнес-студии или для использования в элитных видах спорта. Также, может использоваться в медицинской области при оценивании эффективности.
Стационарный эргометрический тренажер 10 имеет велосипедную раму 12 с сиденьем 14 и рулями 16. Позиции сиденья 14 и рули 16 регулируются, но предназначены для фиксации во время цикла тренировки. В области стоп под сиденьем 14 тренажер 10 содержит привод для ног, включающий поочередно действующие элементы привода в форме педалей 18, приводимых в движение ногами. Педали 18 установлены с помощью шатунов педалей 20 на противоположных сторонах ведущего колеса 22 посредством педального вала 23 (Фиг. 9), проходящего через ведущее колесо 22.
Узел 24 маховика соединен с ведущим колесом 22 посредством передачи 26. Для варианта реализации изобретения, проиллюстрированного на Фиг. 1, узел 24 маховика содержит пару маховиков 26, как проиллюстрировано на Фиг. 5, которые установлены для вращения на общем валу 28.
Передача 26 содержит цепь 30, обвивающую ведущее колеса 22 и промежуточное колесо 32 (Фиг. 2). В результате педалирования 18 вращается вал педали, что и заставляет вращаться ведущее колесо 22. Ведущее колесо 22 посредством цепи 30 приводит во вращательное движение промежуточные колеса 32, цепь 30 приводит в движение вал, проходящий через промежуточное колесо 32 и через дисковое колесо 34, чтобы и вызывает вращение дискового колеса 34.
Дисковое колесо 34 вызывает вращение общего вала 28 для узла маховика 24 посредством ремня 36 (Фиг. 4), который охватывает дисковое колеса 34 и общий вал 28.
Каждый из элементов маховика 26 установлен на общем валу 28 для вращения с ним и выполнен из стали, но включает в себя медный вкладыш, образующий секцию магнитного обода 38 (Фиг. 6). Тормозное устройство 40, содержащее множество постоянных магнитов, установлено для перемещения с помощью серводвигателя 42 в направлении магнитных колес 38 элементов маховика 26 и в противоположном направлении. При перемещении постоянных магнитов в направлении магнитных ободов 38 элементов 26 маховика и в противоположном направлении изменяется сила торможения, которая создается магнитным притяжением между постоянными магнитами и магнитными ободами 38 элементов маховика 26. Соответственно, перемещая постоянные магниты относительно магнитных колес 38, можно регулировать тормозное усилие, прилагаемое к магнитным ободам 38 элементов 26 маховика и тем самым регулировать величину сопротивления вращению элементов 26 маховика, которая создается магнитным притяжением между магнитными ободами 38 элементов 26 маховика и постоянными магнитами.
Как проиллюстрировано на Фиг. 5-7, постоянные магниты установлены для формирования двух наборов постоянных магнитов 44а, 44b, закрепленных в кривошипе 46, причем каждый набор постоянных магнитов 44а, 44b установлен на противоположных сторонах кривошипа 46 для перемещения в направлении магнитного обода 38, соответствующего одному из элементов маховика 26 и в противоположном направлении.
Для перемещения кривошипа 46, кривошип 46 установлен на первом конце резьбового вала 48, который проходит через резьбовое отверстие в опоре 50, установленной на велосипедной раме 12. Резьбовой вал 48 закреплен за второй конец в ведущем колесе 52, которое, в свою очередь, соединено с ведомым валом 54 серводвигателя 42 с помощью приводного ремня 56.
Работа сервомотора 42 приводит во вращение ведомый вал 54, который, в свою очередь, приводит во вращение ведущее колесо 52 с помощью приводного ремня 56. Размещение резьбового вала 48 в резьбовом отверстии, образованном в опоре 50, вызывает продольное перемещение резьбового вала 48 внутрь и извне резьбового отверстия в направлении элементов маховика 26 и в противоположном направлении. Направление перемещения резьбового вала 48 и, следовательно, кривошипа 46, зависит от направления вращения ведомого вала 54 сервомотора 42 и, следовательно, направления вращения резьбового вала 48.
Стационарный эргометрический тренажер 10 содержит измерительный блок 58 (Фиг. 2) для измерения, при его использовании, по меньшей мере, одного из приводных усилий, прилагаемых посредством привода, и связанного с ним вращающего момента. В частности, измерительный блок 58 содержит кронштейн 60, прикрепленный к велосипедной раме 12. Накладка 62, предпочтительно выполненная из пластмассы, прикреплена к рычагу 60 для прижатия к наружной кромке цепи 30, соединяющей приводное колесо 22 и промежуточное колесо 32.
Для варианта осуществления изобретения, который проиллюстрирован на Фиг. 2, накладка 62 слегка прижимает цепь 30 вовнутрь. Для других вариантов реализации изобретения накладка 62 может располагаться на внутренней поверхности цепи для прижатия цепи 30 немного вовне.
Если цепь 30 натянута, когда движущая сила прикладывается к педалям 18, приводимым в действие ногой пользователя, тогда тангенциальная составляющая силы действует на накладку 62 как восстанавливающая сила, пропорциональная натяжению цепи 30 и, следовательно, приводному усилию. Эластичный изгиб рычага 60 измеряется растягиваемой измерительной полосой 64.
Понятно, что поскольку восстанавливающая сила пропорциональна натяжению цепи 30 и, следовательно, приводной силе, то измерение восстановительной силы можно использовать для расчета величины движущей силы, приложенной к педалям 18, во время работы стационарного эргометрического тренажера 10.
Аналогично, поскольку известна длина каждого из шатунов 20 педалей, измерения восстанавливающей силы применяются для вычисления момента, приложенного к приводному колесу 22 при помощи педалей 18.
Для калибровки измерений силы масса известной величины крепится к одной из педалей 18, а элементы маховика 26 или дисковое колесо 34 блокируются для предотвращения их вращения. Сила, измеренная с помощью измерительного блока 58 при подобных условиях, позволяет калибровать измерительный блок 58 путем сравнения восстанавливающей силы с известной силой, приложенной известной массой, прикрепленной к педали 18 во время функционирований стационарного эргометрического тренажера 10.
Для данного варианта реализации изобретения измерительный блок 58 сконфигурирован для непрерывного измерения приводного усилия, приложенного через привод во время работы тренажера 10. Благодаря непрерывной работе предполагается, что измерительный блок 58 измеряет силу, приложенную через привод до 100 раз в секунду.
Стационарный эргометрический тренажер 10 также содержит измерительное устройство 66 (Фиг. 3) для измерения частоты педалирования во время работы тренажера 10.
Понятно, что в контексте велопоездки частота педалирования относится к скорости педалирования или к количеству оборотов шатунов педалей 20 в минуту (об/мин).
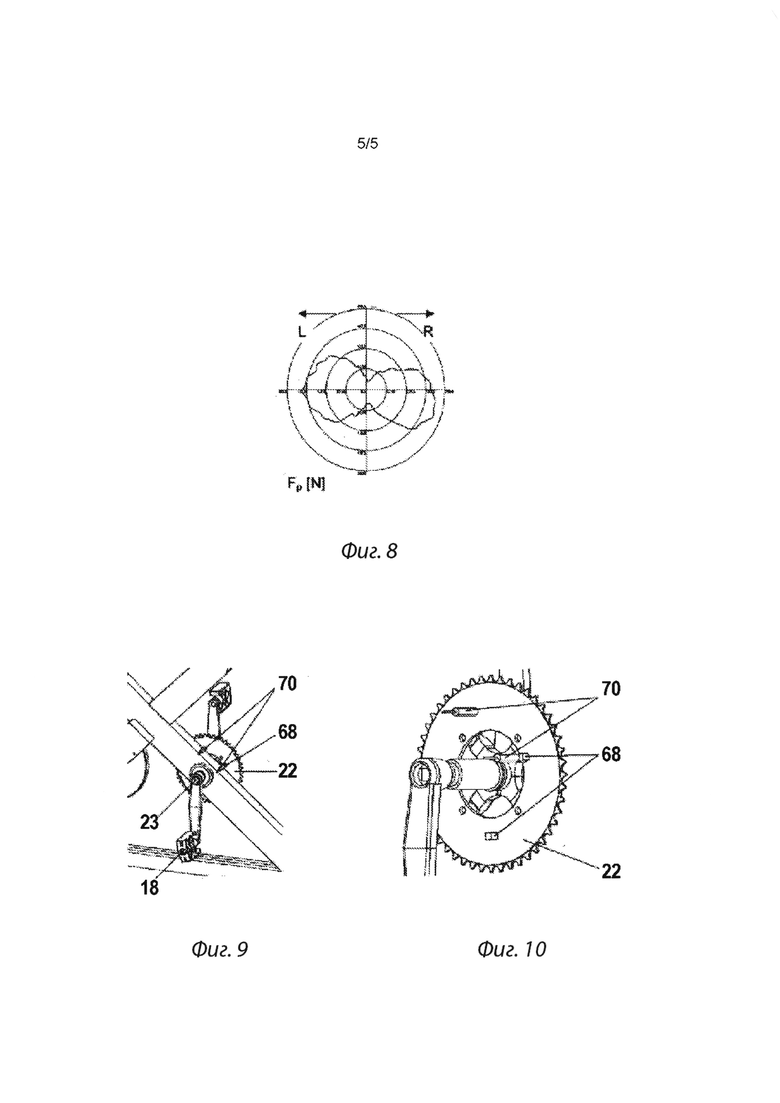
Измерительное устройство 66 стационарного эргометрического тренажера 10, проиллюстрированное на Фиг. 1, схематично показано на Фиг. 9 и Фиг. 10, содержит пару частей 68 датчика, установленных на приводном колесе 22, и пару датчиков 70, расположенных на неподвижных местах велосипедной рамы 12.
Части датчика 68 и датчики 70 расположены относительно друг друга таким образом, что при вращении ведущего колеса 22 каждая из частей датчика 68 проходит мимо одного из датчиков 70, прикрепленных к велосипедной раме 12, так что каждая часть датчика 68 идентифицируется только один раз за цикл вращения ведущего колеса 22 и определяется тем же датчиком 70 при каждом цикле вращения ведущего колеса 22. Это достигается изменением радиального расстояния частей датчика на ведущем колесе 22. В частности, одна из частей датчика 68 расположена на большем радиальном расстоянии от вала педали на ведущем колесе 22, чем другая часть датчика 68. Аналогичным образом, позиционированы датчики 70 на велосипедной раме 12, они расположены в соответствующих друг от друга местах относительно вала педали, и каждый датчик 70 идентифицирует только одну из частей датчика 68 при вращении ведущего колеса 22.
Относительное положение частей датчика 68 и датчиков 70 также выбирается так, чтобы часть датчика 68 перемещалась в соответствии с относящимся к ней датчиком 70 с интервалом 180° и, таким образом, положение движущегося ведущего колеса 22 в точке, куда каждая из частей датчика 68 перемещается в соответствии с относящемуся к ней датчику 70, соответствует подвижному чередованию нагрузки между педалями 18.
Соответственно, во время каждого полного оборота ведущего колеса 22 части датчиков 68 и датчики 70 генерируют два сигнала с интервалом 180°. Время между этими сигналами может применяться для вычисления скорости вращения ведущего колеса 22 и, следовательно, скорости педалирования, иначе называемой каденсом.
Аналогичным образом, поскольку сигналы генерируются с интервалом 180° и соответствуют точкам, в которых происходит чередование нагрузки с точки зрения переключения пользователя с одной педали на другую, сигналы, генерируемые частями датчика 68, проходящие через датчики 70, могут интерпретироваться как показатель времени чередования нагрузки.
Для варианта реализации изобретения, который проиллюстрирован на Фиг. 9 и Фиг. 10, части датчика 68 представляют собой магниты, а датчиками 70 служат датчики магнитного поля. Для других вариантов реализации предполагается использование других частей датчиков и датчиков.
Предусматривается также, что для других вариантов реализации изобретения число частей датчика 68 или количество датчиков 70 может изменяться. В одном из подобных вариантов реализации изобретения один датчик 68 может крепиться к ведущему колесу 22, а датчики 70 могут устанавливаться на велосипедной раме 12 в фиксированных местах, так что часть датчика 68 проходит каждый из датчиков 70 с интервалами, равными 180°. При подобном варианте реализации изобретения часть датчика 68 и датчики 70 снова располагаются относительно друг друга так, что часть датчика 68 перемещается в соответствии с каждым из датчиков 70 во время вращения ведущего колеса 22, в положении движения ведущего колеса 22, соответствующего чередованию нагрузки между педалями 18.
Для подобного варианта реализации изобретения части датчика 68 и датчики 70 снова расположены относительно друг друга так, что часть датчика 68 перемещается в соответствии с каждым из датчиков 70 во время вращения ведущего колеса 22 в положении, когда ведущее колесо 22, соответствующее чередованию нагрузки между педалями 18.
В другом подобном варианте реализации изобретения пара частей датчика 68 может быть прикреплена к ведущему колесу 22, а один датчик 70 может быть установлен на велосипедной раме 12 в фиксированном положении, так что каждая из частей 68 датчика проходит датчик 70 в точке с интервалом, равным 180°. Для подобного варианта реализации изобретения части датчика 68 и датчик 70 снова расположены относительно друг друга таким образом, что датчик 70 обнаруживает соответствующую часть датчика 68 во время вращения ведущего колеса 22 в положении движения ведущего колеса 22, соответствующего чередованию нагрузки между нажатиями на педали 18.
Для сравнения данных, собранных с помощью измерительного блока 58 и измерительного устройства 66, стационарный эргометрический тренажер 10 включает управляющий модуль 72 (Фиг. 5).
Управляющий модуль 72, предпочтительно, представляет собой программируемое устройство, подключенное к измерительному блоку 58 и измерительному устройству 66 для принятия сигналов, указывающих на приводное усилие, применяемое во время работы тренажера, к цепи 30 и скорость вращения педалей вместе со временем чередования нагрузок между двумя педалями 18.
Управляющий модуль 72 выполнен с возможностью использования результатов измерений, полученных от измерительного блока 58 и измерительного устройства 66, для вычисления одного или нескольких параметров эффективности работы. Эти параметры эффективности могут включать частоту педалирования, мощность, скорость вращения маховика, приводное усилие, прикладываемое к педалям, и другие выводимые из него значения переменных.
Подобные параметры эффективности могут передаваться из управляющего модуля 72 в коммуникационный модуль 74 для последующей передачи в пользовательский интерфейс (не показан), подключенный к коммуникационному модулю 74. Кроме того, управляющий модуль 72 сконфигурирован таким образом, чтобы можно было сравнивать, по меньшей мере, один или большее число расчетных параметров эффективности работы с заранее определенным профилем рабочих характеристик.
В зависимости от результатов сравнения, которые будут рассмотрены более подробно ниже, управляющий модуль 74 соединяется с сервомотором 42 и конфигурируется для управления сервомотором 42, что позволяет перемещать два набора постоянных магнитов 44а, 44b по отношению к магнитным ободам 38 элементов маховика 26. При регулировке относительных положений двух наборов постоянных магнитов 44а, 44b относительно магнитных колес 38 элементов 26 маховика управляющий модуль 72 регулирует тормозное усилие, два набора постоянных магнитов 44а, 44b. Это, в свою очередь, оказывает влияние на сопротивление вращению элементов 26 маховика и, таким образом, влияет на измерения, полученные посредством измерительного блока 58 и измерительного устройства 66. Благодаря надлежащему управлению сервомотором 42, управляющий модуль 72 настраивает полученные из измерительного блока 58 и измерительного устройства 66 измерения для регулировки всех параметров или каждого параметра эффективности работы, вычисленного управляющим модулем, в соответствии с заданным профилем рабочих характеристик.
Как показано выше, управляющий модуль 72 соединен с коммуникационным модулем 74 для передачи сигналов, представляющих параметры эффективности работы, вычисленные управляющим модулем 72, на внешнее устройство для отображения их с помощью пользовательского интерфейса.
Помимо передачи сигналов внешнему устройству в виде сигналов обратной связи, сообщающих о производительности пользователя, коммуникационный модуль 74 выполнен с возможностью принимать управляющие сигналы и передавать эти сигналы управляющему модулю 72.
Для варианта реализации изобретения, который проиллюстрирован на Фиг. 1, коммуникационный модуль 74 содержит радиомодуль, сконфигурированный для приема управляющих сигналов и передачи сигналов обратной связи по протоколу беспроводной связи, известному как BLUETOOTH®. Поддерживается беспроводное соединение коммуникационного модуля 74 с внешним устройством, таким как смартфон, планшет, смарт-часы или другое вычислительное устройство.
Для других вариантов реализации изобретения предполагается, что для создания беспроводного соединения между коммуникационным модулем 74 и внешним устройством может использоваться другой протокол беспроводной связи, такой как ANT+®. Также предполагается, что проводное соединение может использоваться для соединения коммуникационного модуля 74 с внешним устройством. Коммуникационный модуль 74 может, например, подключаться к внешнему устройству с помощью кабеля передачи данных, такого как USB-кабель.
Использование коммуникационного модуля 74 для облегчения соединения с внешним устройством, таким как смартфон, планшет, смарт-часы или другое вычислительное устройство, позволяет формировать пользовательский интерфейс. Предусмотрено, что коммуникационный модуль 74 связи может подключаться к смартфону, планшету, смарт-часам или другому вычислительному устройству, на котором выполняется приложение, настроенное для связи с коммуникационным модулем 74, и, таким образом, разрешает пользователю вводить данные для формирования предопределенного профиля рабочих характеристик.
Коммуникационный модуль 74 также может подключаться к подобному устройству для обеспечения возможности по визуализации сигналов обратной связи на экране устройства. Интерфейс может, например, отображать измерения частоты педалирования и/или приложенной силы. Также может или альтернативно отображать один или несколько параметров производительности работы, вычисленных управляющим модулем на основе измерений, полученных из измерительного блока 58 и измерительного устройства 66.
Интерфейс может также включать дисплей POLAR VIEW™ в зависимости от периодов чередования нагрузки, который определяется измерительным устройством 66, и измеренных величин силы, а также других значений переменных, вычисленных управляющим модулем 72 в ответ на результаты измерений, поступивших от измерительного блока 58. Формирование дисплея POLAR VIEW™, отображающего график зависимости усилия от времени, иллюстрирует эффективность работы и технику использования педалей пользователем при конкретной ссылке на особенности работы правой и левой конечностей пользователя. Поэтому у пользователя тренажера формируется иллюзия скоростной езды на велосипеде, что разрешает пользователю визуально определять области, где эффективность работы и/или техника педалирования требуют улучшения.
Пример дисплея POLAR VIEW™ проиллюстрирован на Фиг. 8.
Теперь переходим к описанию работы стационарного эргометрического тренажера 10.
Во время работы тренажера 10 пользователь управляет вращением элементов маховика 26, работая педалями 18. Результирующее приводное усилие, прилагаемое к цепи, обвивающей ведущее колесо 22, измеряется с помощью измерительного блока 58 в непрерывном режиме, как указано выше, и полученные измерения передаются управляющему модулю 72.
Аналогично, частота или скорость педалирования измеряются измерительным устройством 66, и полученные результаты измерений вместе с сигналами, указывающими время чередования нагрузок между педалями 18, передаются управляющему модулю 72.
Управляющий модуль 72 использует измерения и сигналы, полученные от измерительного устройства 58, а также от измерительного блока 66, вычисляет выходную мощность пользователя тренажера.
Управляющий блок 72, предпочтительно, вычисляет выходную мощность пользователя один раз за один оборот шатунов педалей 20 на основании формулы, при которой мощность = сила × скорость, а скорость может быть рассчитана со ссылкой на измеренную частоту педалирования и пройденное расстояние за оборот педали 20. Как указано выше, расстояние, пройденное за оборот шатунов педали 20, может предварительно устанавливаться в управляющем модуле 72 в соответствии с рядом предварительно установленных передач. Управляющий модуль 72 может выполняться с возможностью увеличения силы торможения, прилагаемой к узлу маховика 24 путем выбора пользователем более высокой передачи, и, наоборот, при имитации дополнительного сопротивления, которое будет испытывать велосипедист при переключении передач на настоящем велосипеде. Аналогично, управляющий модуль 72 может конфигурироваться для увеличения расстояния, пройденного за оборот шатунов педалей 20 при нарастании передач от самой низкой передачи до самой высокой, и наоборот.
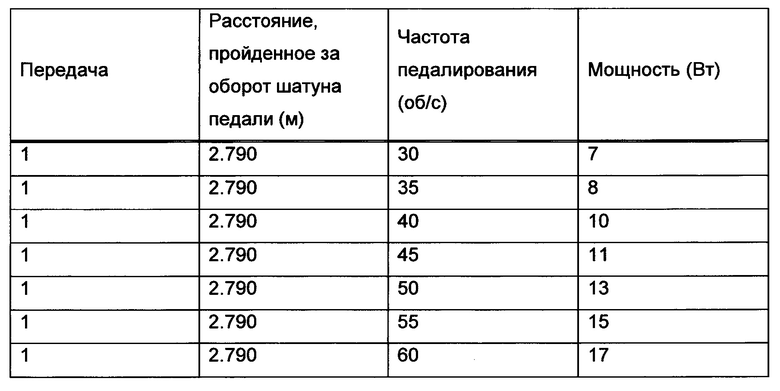
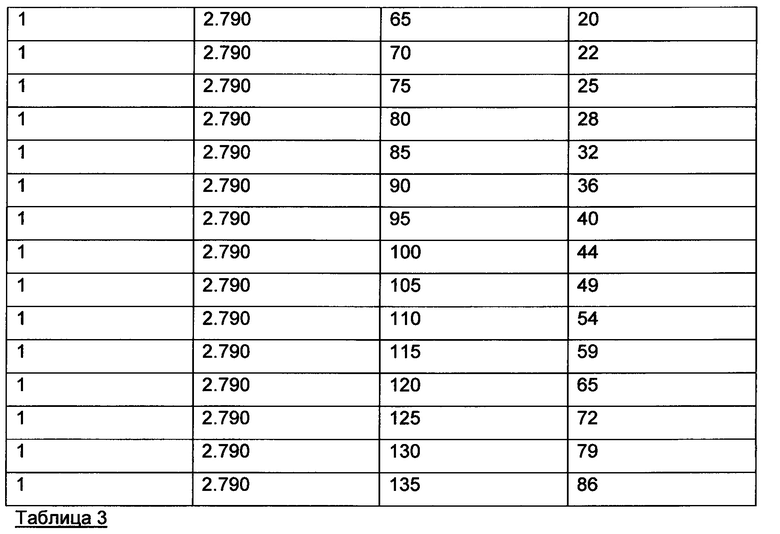
В особенно предпочтительном варианте реализации изобретения расстояние, пройденное за оборот шатунов педалей, увеличивается постепенно от минимума 2,790 м для нижней передачи (передача 1), до максимального - 10,258 м для верхней передачи (передача 22), как указано в таблице 1, приведенной ниже.
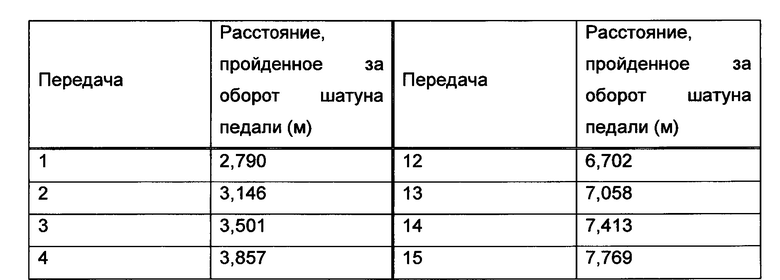
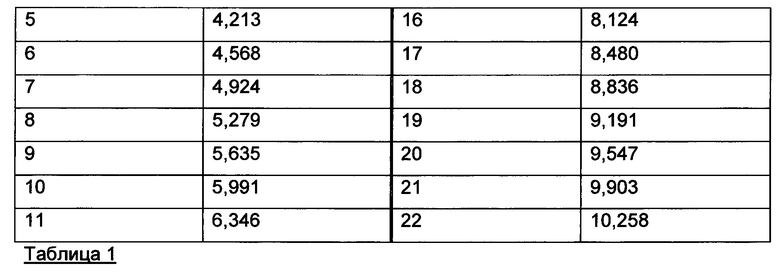
Для подобных вариантов реализации изобретения понятно, что пользователь, управляющий тренажером при выбранной передаче 1 с частотой вращения шатунов педалей 60 оборотов в минуту, будет имитировать езду со скоростью 2,790 м/с.
Чтобы разрешить пользователю изменять передачи, на руль 16 можно поместить кнопки (не проиллюстрированы), что разрешит пользователю с легкостью переключать передачи, как если бы речь шла о езде на настоящем велосипеде. Такие кнопки могут подключаться к управляющему модулю 72 для обеспечения необходимого сигнала, предпочтительно предусмотреть одну кнопку для переключения вверх по передачам, а вторую - для переключения вниз по передачам.
Для других вариантов реализации изобретения кнопки выполнены с возможностью отправки управляющих сигналов коммуникационному модулю 74 для последующей передачи управляющему модулю 72.
Управляющий модуль 72 может вычислять и другие параметры или значения переменных, отражающие эффективность работы, которые выводятся из приводного усилия для последующей передачи их через коммуникационный модуль 74 внешнему устройству, подключенному к коммуникационному модулю 74, для поддержки пользовательского интерфейса.
В простейшей форме пользователь может создать предопределенный профиль рабочих характеристик в управляющем модуле 72, что позволит гарантировать достижение постоянной выходной мощности пользователем во время работы тренажера 10. Этого можно достичь, измеряя частоту педалирования и прилагаемую силу для расчета фактической выходной мощности пользователя, сравнивая вычисленную мощность с величиной выходной мощности, требуемой заданным профилем рабочих характеристик, управляя двигателем для увеличения или уменьшения тормозного усилия, что потребует от пользователя применения большей или меньшей силы для достижения требуемой выходной мощности при той же частоте педалирования.
Пользователь может также выбирать из ряда предопределенных профилей рабочих характеристик еще до начала тренировки. Пользователь может, например, выбрать предопределенный профиль рабочих характеристик, который определяется нелинейной зависимостью между мощностью и частотой вращения педалей для конкретной передачи. Затем при работе тренажера 10, управляющий модуль 72 использует результаты измерения частоты педалирования и приложенной силы для расчета фактической выходной мощности пользователя и сравнит вычисленное значение мощности с измеренной частотой педалирования, учитывая нелинейную зависимость между мощностью и частотой педалирования, которые определяют заданный профиль рабочих характеристик.
При выполнении этого сравнения управляющий модуль 72 может определить, является ли фактическая выходная мощность пользователя более высокой или меньшей, чем требуется в соответствии с заранее заданным профилем производительности для измеренной частоты вращения педалей, и управляет сервомотором 42, чтобы отрегулировать относительные положения наборов постоянных магнитов 44а, 44b относительно элементов 26 маховика, чтобы отрегулировать тормозное усилие, прилагаемое наборами постоянных магнитов 44а, 44b к элементам маховика 26. Это, в свою очередь, увеличивает или уменьшает усилие, требуемое от пользователя тренажера при вращении педалей с одинаковой частотой, и может использоваться для настройки результатов измерений, полученных от измерительного блока 58 и измерительного устройства 66, так что рассчитанная выходная мощность пользователя соответствует мощности, требуемой заданным профилем производительности для измеренной частоты вращения педалей.
В варианте реализации изобретения, проиллюстрированном на фигурах, управляющий модуль 72 также конфигурируется для вычисления предварительно определенного профиля рабочих характеристик при получении данных об эффективности работы в виде управляющих сигналов от коммуникационного модуля 74.
Пользователь может вводить ряд параметров, характеризующих велопоездку, во внешнее устройство, подключенное к коммуникационному модулю 74, которые, в свою очередь, передаются управляющему модулю 72 через коммуникационный модуль 74 и разрешают управляющему модулю 72 вычислять заданные пользователем предварительно определенные данные профиля рабочих характеристик на основе выбранных параметров велопоездки.
Данные, характеризующие эффективность работы, могут включать информацию, относящуюся к одному или нескольким параметрам статического режима велопоездки, которые выбраны из группы, состоящей из угла наклона трассы движения, сопротивления качению между шинами и поверхностью трассы, массы велосипедиста, массы велосипеда и мощности велосипедиста.
Данные, характеризующие эффективность работы, могут также включать информацию, относящуюся к одному или нескольким параметрам динамического режима велопоездки, которые выбраны из группы, состоящей из сопротивления воздуха, создаваемого изменениями скорости ветра, сопротивления воздуха, создаваемого изменениями высоты и сопротивления воздуха, создаваемым с помощью вентилятора.
При получении подобной информации от внешнего устройства в виде управляющих сигналов, принятых через коммуникационный модуль 74, управляющий модуль 72 выполнен с возможностью вычисления эффектов любых выбранных параметров велопоездки, оказывающих влияние на силу лобового сопротивления, которое испытывает велосипедист в этих условиях. В свою очередь, подобный подход разрешает управляющему модулю 72 вычислять заданный профиль рабочих характеристик с учетом дополнительной силы лобового сопротивления.
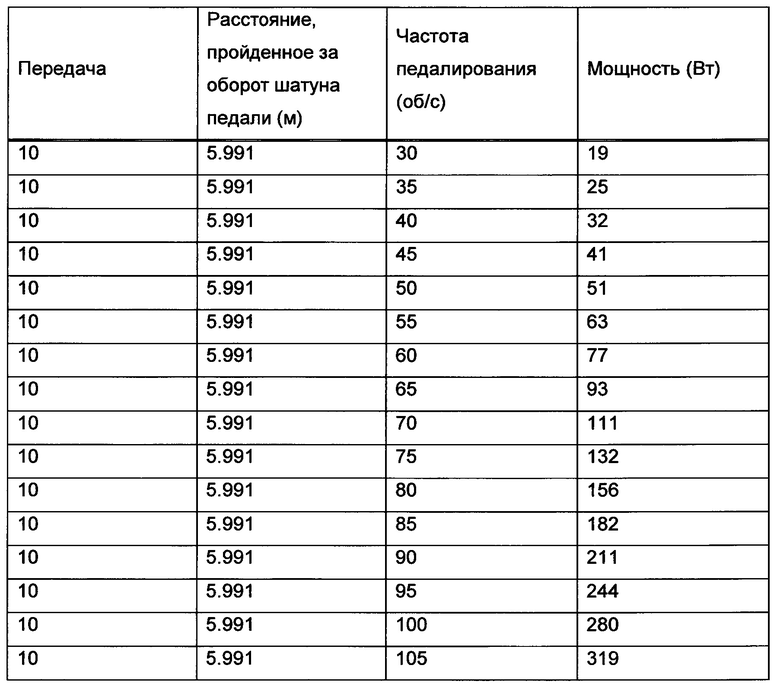
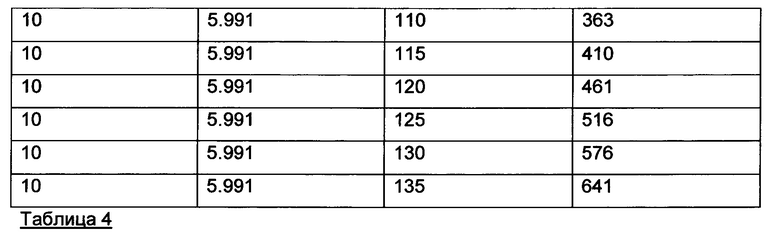
В особенно предпочтительном варианте реализации изобретения расстояние, пройденное за оборот педалей 20, предварительно задано в управляющем модуле в соответствии с рядом предварительно установленных передач, указанных в приведенной выше таблице 1, управляющий модуль 72 вычисляет необходимую дополнительную мощность для преодоления силы лобового сопротивления, создаваемой массой тела пользователя 70 кг на плоской дороге без уклона и нулевого сопротивления ветра в соответствии с предварительно установленным комплектом снаряжения и примерными показателями частоты педалирования, как указано ниже в таблице 2.
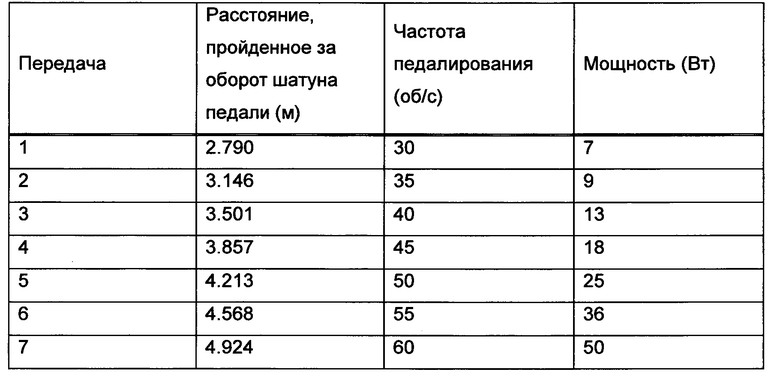
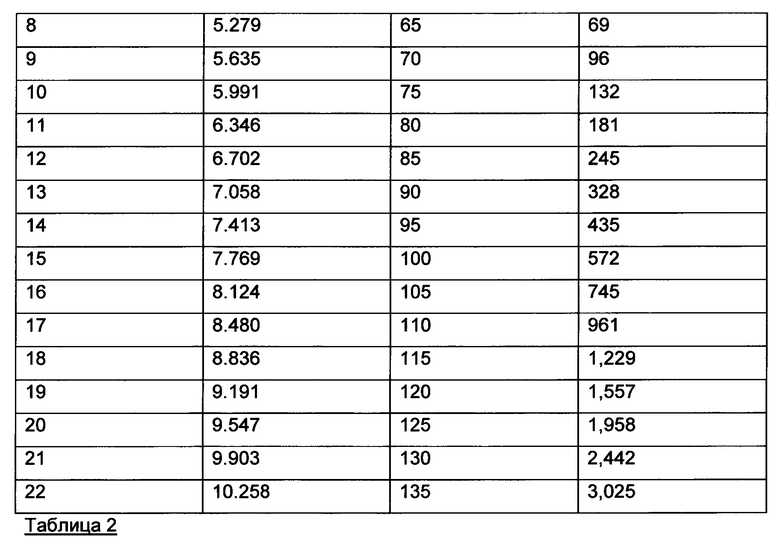
Понятно, что сила лобового сопротивления, которая создается, когда пользователь едет на велосипеде в подобных условиях, увеличивается с ростом частоты педалирования пользователем тренажера для каждой передачи и, таким образом, при увеличении скорости движения велосипеда.
Примеры мощности, необходимой для преодоления силы лобового сопротивления в случае выбора передач 1, 10 и 22 для увеличения частоты педалирования с приращениями, рассчитанной управляющим модулем, приведены ниже в таблицах 3, 4 и 5.
Управляющий модуль 72 может, например, генерировать заранее определенный профиль рабочих характеристик на основе выходной мощности по сравнению с частотой педалирования, которая рассчитывается с учетом силы лобового сопротивления, которую будет испытывать велосипедист в результате выбранных параметров велопоездки. Это позволяет управляющему модулю 72 управлять сервомотором 42 и тем самым управлять перемещением наборов постоянных магнитов 44а, 44b относительно магнитных колес 38 элементов маховика 26 для формирования необходимой силы лобового сопротивления и, таким образом, выполнить имитацию различных условий велопоездки.
При соответствующем выборе параметров велопоездки пользователь может формировать управляющие сигналы, которые инструктируют управляющий модуль 72 по поводу имитации множества комбинаций, связанных с условиями велопоездки. Например, управляющий модуль 72 может имитировать условия легкого веса велосипедиста, который ездит на легком велосипеде по поверхности велодрома; того же велосипедиста при перемещении по грунтовой дороге; тот же велосипедист перемещается по наклонной поверхности при наклоне ее на 5°; тот же велосипедист перемещается по наклонной поверхности -5° при попутном ветре, скорость которого равна 10 миль в час.
Управляющий модуль 72 может, например, имитировать стационарный эргометрический тренажер, имеющий вентилятор с вентиляционными отверстиями на внешнем корпусе вентилятора, который может регулироваться таким образом, чтобы принимать различные положения, воздействовать на воздушный поток, проходящий через вентилятор, работать педалями для поддержки вращения вентилятора.
Если обратиться к упомянутым выше динамическим параметрам велопрогулки, сила лобового сопротивления, испытываемая велосипедистом в подобных условиях, будет варьироваться в зависимости от скорости потока. Соответственно, управляющий модуль 72 может выполняться с возможностью использования измерений, полученных от измерительного устройства 58, для вычисления скорости вращения элементов маховика 26 или эквивалентной скорости реального велосипеда, работающего при той же частоте педалирования и той же движущей силе.
Скорость реального велосипеда может быть рассчитана, как описано выше, со ссылкой на измеренную частоту педалирования и пройденное расстояние за один оборот шатунов педалей 20.
Скорость вращения элементов маховика 26 также указывает на фактическую скорость велосипеда, который может также или альтернативно использоваться управляющим модулем 72 для настройки заданного профиля эффективности, чтобы отразить влияние скорости пользователя на один или более динамических параметров велопоездки, используемых при вычислении заданного профиля рабочих характеристики.
Для других вариантов реализации изобретения внешнее устройство может включать данные, относящиеся к велосипедному маршруту, которые могут применяться для формирования управляющих сигналов при имитации конкретного маршрута. Данные могут, например, относиться к определенному этапу велогонки Тур де Франс или маршруту олимпийской трассы.
Для подобных вариантов реализации изобретения управляющий модуль 72 может выполняться с возможностью генерирования заранее определенного профиля рабочих характеристик на основе управляющих сигналов, относящихся к характеристикам выбранного маршрута. Такие характеристики могут включать угол наклона, сопротивление качению между шинами велосипеда и поверхностью трассы и высотой велосипедиста. Сюда также входят скорость ветра, направление ветра и другие метеорологические характеристики в том случае, если пользователь решит имитировать точные условия ранее записанной поездки по выбранному маршруту.
Во время моделирования управляющий модуль 72 вычисляет выходную мощность пользователя в соответствии с вышеописанными методами и сравнивает с заданным профилем рабочих характеристик для определения выходной мощности, которая требуется при измеренной частоте педалирования пользователя тренажера. Это позволяет управляющему модулю 72 регулировать работу сервомотора 42 и тем самым управлять перемещением наборов постоянных магнитов 44а, 44b относительно магнитных колес 38 элементов 26 маховика для настройки измерений, полученных от измерительного блока 58 и измерительного устройства 66, что позволит обеспечить требуемую выходную мощность и, таким образом, имитировать сопротивление педалированию, которое будет испытывать пользователь тренажера при данной частоте педалирования, на выбранной передаче и в положении по реализуемому пользователем маршруту.
Понятно, что данные, относящиеся к выбранному маршруту, могут быть представлены в виде одной передачи от внешнего устройства через коммуникационный модуль 74. Однако также понятно, что данные могут непрерывно передаваться от внешнего устройства управляющему модулю 72 через коммуникационный модуль 74 во время моделирования выбранного маршрута, что позволит обеспечить предоставление большего количества данных и, таким образом, облегчит постоянную корректировку заданного профиля рабочих характеристик и более подробное и точное моделирование.
В любом случае управляющий модуль 72 может передавать сигналы обратной связи через коммуникационный модуль 74 обратно внешнему устройству, что позволяет внешнему устройству отслеживать процесс перемещения пользователя по выбранному маршруту. Имеется возможность по передаче сигнала внешнему устройству, что позволит внешнему устройству сгенерировать видеоизображение, обеспечивающее пользователю возможность визуализации перемещения по выбранному маршруту.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭРГОМЕТРИЧЕСКИЙ ТРЕНАЖЕР | 2008 |
|
RU2472557C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭФФЕКТИВНОСТИ ДЕЙСТВИЙ ПОЛЬЗОВАТЕЛЯ ВО ВРЕМЯ РАБОТЫ ТРЕНАЖЕРА | 2019 |
|
RU2822082C2 |
| Велотренажер | 1980 |
|
SU935119A1 |
| ВЕЛОТРЕНАЖЕР | 2019 |
|
RU2702816C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ ВЕЛОСИПЕДИСТА НА ВЕЛОТРЕНАЖЕРЕ | 2018 |
|
RU2687773C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ВЕЛОСИПЕД (ВАРИАНТЫ), КОЛЕСО ВЕЛОСИПЕДА, ПРИВОД ВЕЛОСИПЕДА, РЫЧАЖНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА, ПЕДАЛЬНЫЙ МЕХАНИЗМ ВЕЛОСИПЕДА И КОМПЛЕКТ, СОДЕРЖАЩИЙ ВЕЛОСИПЕД И ПРИЦЕП | 2007 |
|
RU2373101C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ КРУГОВОМУ ПЕДАЛИРОВАНИЮ В ВЕЛОСПОРТЕ | 2013 |
|
RU2543444C1 |
| ВЕЛОСИПЕД "МАКСИ-2" | 1992 |
|
RU2057673C1 |
| ВЕЛОСИПЕД С СИСТЕМОЙ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОЙ | 2015 |
|
RU2667438C2 |
Стационарный эргометрический тренажер (10) содержит ножной привод, содержащий поочередно действующие приводные элементы в виде ножных педалей (18), установленными с помощью шатунов педалей (20) на противоположных сторонах ведущего колеса (22). Маховик (24) соединен с ведущим колесом (22) посредством зубчатого механизма (26), причем маховик содержит магнитный обод (38). Тренажер (10) содержит тормозное устройство (40) в виде одного или нескольких постоянных магнитов (44а, 44b), установленных для перемещения с помощью двигателя (42) в направлении к магнитному ободу (38) или от магнитного обода (38) маховика (24), чтобы избирательно регулировать тормозную силу, приложенную к маховику (24), посредством одного или каждого постоянного магнита (44а, 44b). Измерительный блок (58) предназначен для измерения, при использовании, по меньшей мере, одного из: приводного усилия, передаваемого через привод, и связанного с ним момента, вместе с измерительным устройством (66) для измерения, при использовании, частоты педалирования. Управляющий модуль (72) соединен с измерительным блоком (58), измерительным устройством (66) и двигателем (42) тормозного устройства (40), а коммуникационный модуль (74) соединен с управляющим модулем (72) и сконфигурирован для приема управляющих сигналов и передачи этих управляющих сигналов в управляющий модуль (72) и выполнен с возможностью для передачи сигналов обратной связи, принятых из управляющего модуля (72), сообщающего о производительности пользователя. Управляющий модуль (72) выполнен с возможностью приема измерений из измерительного блока (58) и измерительного устройства (66) и для использования этих измерений для вычисления одного или нескольких параметров производительности и для сравнения каждого параметра производительности с заранее определенным профилем рабочих характеристик. Управляющий модуль (72) также выполнен с возможностью управления двигателем (42), чтобы перемещать один или каждый постоянный магнит (44а, 44b) относительно магнитного обода (38) маховика (24) для регулировки тормозного усилия, создаваемого одним или каждым постоянным магнитом (44а, 44b), и тем самым настраивая результаты измерения, полученные от измерительного блока (58) и измерительного устройства (66), чтобы отрегулировать один или каждый параметр производительности, вычисленный управляющим модулем (72) чтобы соответствовать предварительно определенному профилю рабочих характеристик. 3 н и 27 з.п. ф-лы, 10 ил., 5 табл.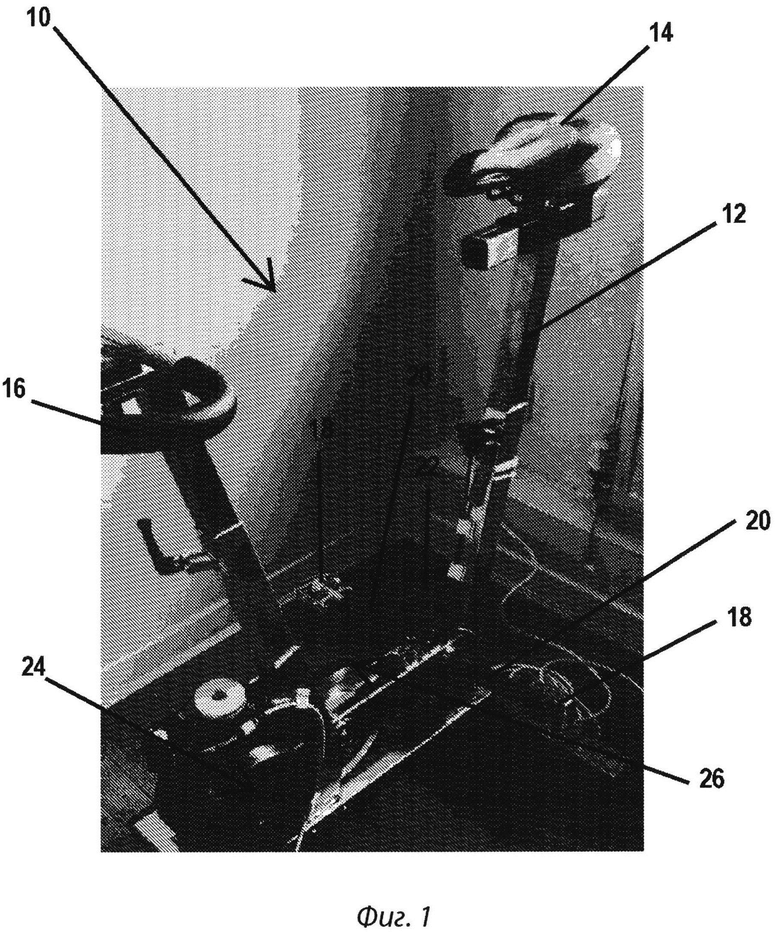
1. Стационарный эргометрический тренажер, содержащий:
привод для ног, содержащий поочередно функционирующие элементы привода в виде педалей для ног, установленных с помощью шатунов педалей на противоположных сторонах ведущего колеса;
маховик, соединенный с ведущим колесом посредством зубчатого механизма, причем маховик содержит магнитный обод;
тормозное устройство в виде одного или нескольких постоянных магнитов, установленных с возможностью перемещения с помощью двигателя по направлению к магнитному ободу маховика и в направлении от магнитного обода маховика, что позволяет избирательно регулировать тормозное усилие, приложенное к маховику, путем воздействия каждого из постоянных магнитов;
измерительный блок для измерения, при его использовании, по меньшей мере, одного из приводных усилий, которое прикладывается посредством привода, и связанного с ним момента силы;
измерительное устройство для измерения частоты педалирования при использовании тренажера;
управляющий модуль, подключенный к измерительному блоку, измерительное устройство и двигатель тормозного устройства; а также
коммуникационный модуль, связанный с управляющим модулем и сконфигурированный для приема управляющих сигналов и передачи этих управляющих сигналов управляющему модулю и сконфигурированный для передачи сигналов обратной связи, принятых от управляющего модуля, которые включают информацию об эффективности работы пользователя,
причем управляющий модуль сконфигурирован для получения результатов измерений от измерительного блока и измерительного устройства и для применения этих результатов измерений при вычислении одного или нескольких параметров производительности и для сравнения их или каждого параметра производительности с заданным профилем рабочих характеристик и для управления двигателем, который перемещает каждый из постоянных магнитов относительно магнитного обода маховика, чтобы отрегулировать тормозное усилие, приложенное каждым постоянным магнитом, и тем самым настроить результаты измерений, полученные от измерительного блока и измерительного устройства, чтобы отрегулировать их или каждый параметр производительности, рассчитанный управляющим модулем так, чтобы соблюдалось соответствие с предварительно определенным профилем рабочих характеристик.
2. Стационарный эргометрический тренажер по п. 1, в котором измерительный блок выполнен с возможностью непрерывного измерения, при использовании, по крайне мере, одного из приводного усилия, приложенного через привод, и связанного с ним крутящего момента.
3. Стационарный эргометрический тренажер по п. 2, в котором измерительный блок выполнен с возможностью измерения, по меньшей мере, одного из приводного усилия, приложенного через привод, и связанного с ним крутящего момента с частотой не менее 100 раз в секунду.
4. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором управляющий модуль выполнен с возможностью вычисления выходной мощности пользователя, развиваемой за один оборот шатунов педалей, на основе формулы мощность = сила × скорость, рассчитанной на основе частоты педалирования, зафиксированной измерительным устройством, и заданного расстояния, пройденного за один оборот педалей.
5. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором управляющий модуль выполнен с возможностью имитации набора предварительно заданных передач, чтобы увеличить тормозное усилие, применяемое к маховику при выборе и использовании более высокой передачи, и наоборот, уменьшить тормозное усилие, применяемое к маховику, при выборе и использовании более низкой передачи, а также и увеличить заранее заданное расстояние, пройденное за оборот шатунов педалей, постепенно с каждой передачей, от самой низкой передачи до самой высокой передачи, а также уменьшать это расстояние в случае перехода от более высоких передач до более низких.
6. Стационарный эргометрический тренажер по п. 5, дополнительно включающий кнопки, предусмотренные на ручках руля, и выполненные с возможностью передачи управляющих сигналов коммуникационному модулю для переключения передач.
7. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором управляющий модуль выполнен с возможностью вычисления заданного профиля рабочих характеристик при получении данных рабочих характеристик, полученных в форме управляющих сигналов от коммуникационного модуля.
8. Стационарный эргометрический тренажер по п. 7, в котором данные, характеризующие эффективность работы, выполняемой пользователем тренажера, могут включать информацию, относящуюся к одному или нескольким параметрам велопоездки, выбранным из группы, куда входит значение угла наклона поверхности трассы для езды на велосипеде, сопротивления качению между шинами велосипеда и поверхностью трассы, масса велосипедиста, масса велосипеда и развиваемая велосипедистом мощность.
9. Стационарный эргометрический тренажер по пп. 7, 8, в котором данные профиля рабочих характеристик могут включать информацию, касающуюся одного или нескольких параметров динамики велопоездки, которые выбираются из группы, включающей значения сопротивления воздуха в зависимости от скорости ветра, сопротивления воздуха, возникающего вследствие перепадов высоты и сопротивления потока воздуха, который создается вентилятором.
10. Стационарный эргометрический тренажер по п. 9, в котором управляющий модуль выполнен с возможностью использования результатов измерений, полученных от измерительного устройства, для вычисления скорости вращения маховика и также предназначен для настройки заданного профиля рабочих характеристик в ответ на вычисленную скорость, чтобы отражать влияние скорости на один или несколько динамических параметров велопоездки.
11. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором коммуникационный модуль выполнен с возможностью приема управляющих сигналов и передачи сигналов обратной связи через проводное соединение.
12. Стационарный эргометрический тренажер по любому из пп. 1-10, отличающийся тем, что коммуникационный модуль содержит радиомодуль, выполненный с возможностью управляющих сигналов и передачи сигналов обратной связи по протоколу беспроводной связи.
13. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором управляющий модуль выполнен с возможностью вычисления заранее определенного профиля рабочих характеристик при получении командных сигналов, относящихся к характеристикам конкретного велосипедного маршрута.
14. Стационарный эргометрический тренажер по п. 13, в котором управляющий модуль вычисляет, при использовании, выходную мощность пользователя и сравнивает ее с мощностью, заданной профилем рабочих характеристик, для определения выходной мощности, которая требуется для измеренной частоты педалирования пользователя, и управления двигателем, чтобы перемещать один или каждый постоянный магнит относительно магнитного обода маховика, чтобы регулировать тормозное усилие со стороны одного или каждого постоянного магнита, и тем самым настраивать результаты измерений, полученные от измерительного блока и измерительного устройства, таким образом, чтобы достигать требуемую выходную мощность.
15. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором тормозное устройство содержит кривошипный элемент, предназначенный для приема одного или каждого постоянного магнита, причем кривошипный элемент соединен с двигателем для перемещения одного или каждого постоянного магнита относительно магнитного обода маховика.
16. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором маховик включает в себя пару колесных элементов, установленных на общей оси вращения, причем каждый из колесных элементов содержит магнитный обод, а тормозное устройство содержит два набора постоянных магнитов, причем каждый из множества постоянных магнитов установлен для перемещения вместе с другим набором постоянных магнитов в направлении к магнитному ободу и от него соответствующего одного из колесных элементов.
17. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором измерительный блок измеряет, при использовании, приводное усилие, передаваемое через привод, и включает в себя рычаг, прикрепленный к цепи зубчатого механизма, причем рычаг слегка прижимается сбоку цепи и измерительный блок дополнительно содержит измерительный датчик для измерения восстанавливающей силы, прилагаемой тяговым механизмом к рычагу.
18. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором управляющий модуль выполнен с возможностью расчета и непрерывного вывода в виде сигналов обратной связи в коммуникационный модуль временных изменений приводного усилия и/или связанного с ним вращающего момента, а также получаемых из него переменных, на основе результатов измерений, переданных управляющему модулю измерительным блоком.
19. Стационарный эргометрический тренажер по любому из предшествующих пунктов, в котором измерительное устройство для измерения частоты педалирования содержит пару частей датчика, прикрепленных к ведущему колесу, и, по меньшей мере один датчик, расположенный в неподвижном положении относительно ведущего колеса, причем части датчика перемещаются вместе с ведущим колесом относительно, по меньшей мере, одного датчика, с помощью которого обнаруживается каждая из частей датчика, проходящая через датчик, когда шестерня находится в одном из двух определенных угловых положений, причем положения отстоят друг от друга на 180° и соответствуют в движении позициям чередования нагрузки между поочередно управляемыми элементами привода.
20. Стационарный эргометрический тренажер по любому из пп. 1-18, в котором измерительное устройство для измерения частоты педалирования содержит пару датчиков, расположенных в неподвижных положениях относительно ведущего колеса и, по меньшей мере, одну часть датчика, прикрепленного к ведущему колесу, по меньшей мере, одна часть датчика перемещается вместе с ведущим колесом относительно датчиков при работе привода, посредством которого каждый из датчиков обнаруживает проходящую часть датчика, когда ведущее колесо расположено в одном из двух определенных угловых положениях, причем положения отстоят друг от друга на 180° и соответствуют в движении позициям чередования нагрузки между поочередно управляемыми элементами привода.
21. Стационарный эргометрический тренажер по п. 19 или 20, в котором каждая часть датчика является магнитом и каждый датчик является датчиком магнитного поля.
22. Стационарный эргометрический тренажер по любому из пп. 19-21, в зависимости от п. 18, в котором управляющий модуль выполнен с возможностью приема сигналов от измерительного устройства, идентифицирующих время чередования нагрузки между поочередно управляемыми элементами привода и, используя время чередование нагрузки, идентифицированное измерительным устройством, для распределения значений переменных, вычисленных на основе измерений, полученных от измерительного блока, попеременно для правой или левой конечности пользователя.
23. Способ работы стационарного эргометрического тренажера, содержащего ножной привод, имеющий поочередно действующие элементы привода в виде ножных педалей, установленных с помощью шатунов на противоположных сторонах шестерни; маховик, соединенный с шестерней через зубчатый механизм, маховик, содержащий магнитный обод; тормозное устройство в виде одного или нескольких постоянных магнитов, установленных для перемещения с помощью двигателя в направлении к магнитному ободу маховика и в сторону от него, чтобы избирательно регулировать тормозное усилие, приложенное к маховику, посредством одного или каждого постоянного магнита; измерительный блок для измерения, при использовании, по меньшей мере одного из приводного усилия, передаваемого через привод, и связанного с ним вращающего момента; и измерительный блок для измерения, при использовании, частоты педалирования,
включающий следующие этапы:
использование результатов измерений, полученные от измерительного блока и измерительного устройства, для расчета одного или нескольких параметров производительности;
сравнение одного или каждого параметра производительности с заданным профилем рабочих характеристик; и
управление двигателем так, чтобы перемещать один или каждый постоянный магнит относительно магнитного обода маховика, чтобы регулировать тормозное усилие, прикладываемое постоянным магнитом, и тем самым настраивать результаты измерений, полученных от измерительного блока и измерительного устройства, таким образом настраивать один или каждый параметр производительности, вычисленный управляющим модулем, в соответствии с заданным профилем рабочих характеристик.
24. Способ работы стационарного эргометрического тренажера по п. 23, дополнительно включающий в себя этап ввода данных рабочих характеристик и вычисления заранее заданного профиля рабочих характеристик на основе данных рабочих характеристик.
25. Способ работы стационарного эргометрического тренажера по п. 24, в котором данные рабочих характеристик содержат информацию, относящуюся к одному или нескольким параметрам велопоездки, выбранным из группы, куда входит значение угла наклона поверхности трассы для езды на велосипеде, сопротивления качению между шинами велосипеда и поверхностью трассы, масса велосипедиста, масса велосипеда и развиваемая велосипедистом мощность.
26. Способ работы стационарного эргометрического тренажера по п. 24 или 25, в котором данные рабочих характеристик содержат информацию, касающуюся одного или нескольких параметров динамики велопоездки, которые выбираются из группы, включающей значения сопротивления воздуха в зависимости от скорости ветра, сопротивления воздуха, возникающего вследствие перепадов высоты и сопротивления потока воздуха, который создается вентилятором.
27. Способ работы стационарного эргометрического тренажера по п. 23, дополнительно включающий в себя этап вычисления скорости вращения маховика с использованием результатов измерений, полученных от измерительного устройства, и этап регулировки заданного профиля рабочих характеристик в ответ на вычисленную скорость, чтобы отражать влияние скорости на один или несколько динамических параметров велопоездки.
28. Способ работы стационарного эргометрического тренажера по п. 24, в котором данные рабочих характеристик содержат информацию, относящуюся к характеристикам конкретного велосипедного маршрута.
29. Способ работы стационарного эргометрического тренажера по п. 28, дополнительно включающий в себя этап вычисления выходной мощности пользователя и сравнение с заданным профилем рабочих характеристик для определения выходной мощности, которая требуется для измеренной частоты педалирования пользователя тренажера, и этап управления двигателем, чтобы перемещать один или каждый постоянный магнит относительно магнитного обода маховика, чтобы отрегулировать тормозную силу, приложенную одним или каждым постоянным магнитом, и тем самым настроить результаты измерения, полученные от измерительного блока и измерительного устройства для достижения требуемой выходной мощности.
30. Компьютерная программа или компьютерный программный продукт, содержащий код компьютерной программы, который при выполнении на компьютере или процессоре и памяти реализует способ работы стационарного эргометрического тренажера по любому из пп. 23-28.
| US 8641581 B2, 04.2.2014 | |||
| WO 2007015096 A2, 08.02.2007 | |||
| ВЕЛОТРЕНАЖЕР | 1993 |
|
RU2081645C1 |
| WO 2012042092 A1, 05.04.2012. | |||

