Изобретение относится к области способов виброиспытаний технических изделий при многоточечном управлении воспроизведением гармонической вибрации с изменяющейся (качающейся) частотой в рабочем диапазоне частот 10-2000 Гц и более.
Такие способы широко используются при виброиспытаниях на однокомпонентных электродинамических вибростендах многорезонансных изделий, масса и габариты которых имеют тот же порядок, что и подвижная часть вибростенда. К таким изделиям, в частности, относится сложная бортовая аппаратура и приборы.
При многоточечном управлении воспроизведением вибрации сигнал управления (сигнал обратной связи) формируется в воображаемой контрольной точке по одновременно измеряемым сигналам с нескольких реальных контрольных точек, в которых установлены однокомпонентные виброизмерительные преобразователи (ВИП), измерительные оси которых параллельны рабочей оси подвижной части вибростенда, вдоль которой действует управляемая по величине переменная вибровозбуждающая сила.
Контрольные точки выбирают вблизи мест крепления испытуемых изделий на переходном приспособлении, с помощью которого обеспечивается жесткое крепление изделий в определенном положении на столе подвижной части вибростенда.
Испытуемое изделие подвергается вибрации в составе механической системы «подвижная часть вибростенда - переходное приспособление -испытуемое изделие» (система ВПИ), присоединенной к неподвижной части вибростенда с помощью упругого подвеса. В идеальном случае система ВПИ должна совершать прямолинейное поступательное колебательное движение вдоль рабочей оси вибростенда. При этом узлы крепления изделия к приспособлению и контрольные точки должны совершать управляемые прямолинейные гармонические колебания с одинаковыми фазами (синфазные колебания) параллельно рабочей оси вибростенда.
В реальных условиях при виброиспытаниях на однокомпонентных электродинамических вибростендах сложные многорезонансные изделия в составе системы ВПИ в некоторых поддиапазонах рабочего диапазона частот подвергаются воздействию пространственных вибраций. В результате одни части изделий переиспытываются, а другие недоиспытываются. Кроме того, испытуемые изделия подвергаются интенсивным незаданным поперечным вибрациям.
Основные физические причины значительных искажений задаваемых режимов испытаний обусловлены тем, что с точки зрения динамики система ВПИ представляет собой перевернутый физический маятник на упругом подвесе, у которого центр масс лежит выше центра жесткости подвеса.
Система ВПИ кроме управляемых прямолинейных вибраций в резонансных поддиапазонах совершает паразитные неуправляемые угловые (маятниковые) колебания в двух взаимно ортогональных плоскостях вокруг осей, проходящих через центр жесткости упругого подвеса вибростенда. Паразитные угловые вибрации достигают максимумов в области резонансов элементов (осцилляторов) внутри системы ВПИ и резонансов отдельных частей системы ВПИ относительно центров жесткости, лежащих в затянутых стыках соединенных частей системы ВПИ (см. Остроменский П.И. Анализ причин поперечных колебаний при виброиспытаниях аппаратуры на электродинамических стендах // Проблемы машиностроения. Респ. межвед. сборник, Киев.: Наукова думка, 1982. Вып.15. С.39-43).
В резонансных поддиапазонах угловых вибраций системы ВПИ возникают значительные уровни поперечных касательных ускорений, передаваемых испытуемым изделиям через узлы крепления к переходному приспособлению. Проекции этих касательных ускорений на измерительные оси ВИП являются систематическими ошибками, приводящими к существенной неравномерности распределения виброускорений в разных контрольных точках. Это связано с тем, что указанные проекции имеют разные модули и направления в различных контрольных точках (Остроменский П.И. Вибрационные испытания радиоаппаратуры и приборов. - Новосибирск: Изд-во Новосиб. ун-та, 1992. С. 139-143).
Для уменьшения искажений режимов управляемой прямолинейной вибрации используют способы многоточечного формирования сигнала управления с помощью усреднения среднеарифметических или среднеквадратических значений сигналов однокомпонентных ВИП в выбранных контрольных точках или абсолютных мгновенных пиковых значений сигналов в указанных точках. Используются также способы многоточечного управления по максимальным значениям сигналов ВИП (см. Приборы и системы для измерения вибрации, шума и удара: Справочник. В 2-х кн. Кн. 2 / Под ред. В.В. Клюева. - М: Машиностроение, 1978, с. 157-163; см. также Кузнецов А.А. Вибрационные испытания элементов и устройств автоматики. М., «Энергия», 1976, с. 89-90).
Все указанные способы многоточечного формирования сигнала управления режимом виброиспытаний имеют общий недостаток, связанный с тем, что выбор контрольных точек, сигналы с которых используются в многоточечном управлении, и подбор весовых коэффициентов для указанных точек производится при аттестации системы ВПИ трудоемким методом проб и ошибок и существенно зависит от опыта и квалификации инженера-испытателя.
Этот недостаток в значительной степени преодолен в изобретении по а.с. 1227962 (СССР) G01М 7/00 «Способ виброиспытаний изделий и устройство для его осуществления», которое является прототипом предлагаемого способа виброиспытаний изделий. Согласно а.с. 1227962, вибрацию измеряют одновременно в четном числе контрольных точек. Каждую пару точек располагают симметрично на равных расстояниях по разные стороны от рабочей оси вибростенда в одной проходящей через рабочую ось вибростенда плоскости, которую будем называть измерительной. Из мгновенных текущих значений сигналов каждой пары ВИП, расположенных в одной измерительной плоскости, выделяют синфазные составляющие, которые соответствуют управляемой прямолинейной вибрации системы ВПИ. Противофазные составляющие, которые соответствуют проекциям касательных ускорений при паразитных угловых вибрациях системы ВПИ на измерительные оси тех же ВИП, при усреднении компенсируют друг друга.
Основным недостатком прототипа является то, что при многоточечном управлении воспроизведением вибрации на однокомпонентном электродинамическом вибростенде систематические ошибки от паразитных поперечных колебаний системы ВПИ в сигнале управления устраняются полностью только в частных случаях, когда контрольные точки каждой пары расположены в измерительной плоскости симметрично на равных расстояниях по разные стороны от рабочей оси вибростенда.
Цель изобретения - повышение достоверности результатов виброиспытаний изделий при многоточечном управлении воспроизведением гармонической вибрации в общем случае любого расположения парных контрольных точек в измерительных плоскостях с любыми известными расстояниями до рабочей оси вибростенда, выбранными в зависимости от конструктивных особенностей крепления изделия к вибростенду.
Сущность предполагаемого изобретения заключается в следующем. В предлагаемом способе, как и в способе-прототипе, для формирования сигнала управления выбирают четное количество контрольных точек (не менее четырех), разбивают эти точки на пары и располагают точки каждой пары в одной измерительной плоскости по разные стороны от рабочей оси вибростенда. Измерительные плоскости, проходящие через рабочую ось вибростенда, должны быть взаимно ортогональными. В прототипе контрольные точки располагают в измерительных плоскостях симметрично относительно рабочей оси вибростенда и на равных расстояниях от указанной оси. В отличие от прототипа, в предлагаемом способе контрольные точки каждой пары могут быть расположены в измерительной плоскости и симметрично и несимметрично на любых известных расстояниях и до рабочей оси вибростенда, и до его стола.
Этот первый новый признак существенно расширяет, по сравнению с прототипом, область применения предлагаемого способа. Изделие обычно испытывают по трем взаимно ортогональным осям. При этом переходное приспособление и закрепленное в нем испытуемое изделие в совокупности обычно не обладают осевой симметрией во всех трех положениях, что существенно ограничивает возможности применения способа-прототипа.
В прототипе для исключения систематической ошибки от паразитных угловых колебаний системы ВПИ в сигнале управления выделяют синфазные составляющие в одновременно измеряемых сигналах контрольных точек каждой пары их усреднением путем суммирования и деления на два.
В предлагаемом способе, в отличие от прототипа, при выделении синфазных составляющих в одновременно измеряемых сигналах каждой пары контрольных точек, расположенных в одной измерительной плоскости, используют усреднение сигналов с применением весовых коэффициентов, которые определяют аналитически по впервые предложенному алгоритму как отношение удвоенного расстояния от противолежащей контрольной точки выбранной пары точек до рабочей оси вибростенда к сумме расстояний от той же оси до каждой контрольной точки.
Этот второй новый признак является существенным, поскольку позволяет получить качественно новый результат - исключить систематические ошибки от паразитных угловых колебаний системы ВПИ в сигнале управления однокомпонентным электродинамическим вибростендом при любом расположении пары контрольных точек в одной измерительной плоскости по разные стороны от рабочей оси вибростенда. Весовые коэффициенты при этом определяют расчетным путем на этапах подготовки к испытаниям при проектировании переходных приспособлений и аттестации системы ВПИ. При этом отпадает необходимость в трудоемком подборе весовых коэффициентов методом проб и ошибок, который требует от инженера-испытателя большого опыта и высокой квалификации.
Способ-прототип является частным случаем предлагаемого способа при симметричном расположении парных контрольных точек в измерительных плоскостях и единичных весовых коэффициентах.
Таким образом, изобретательский уровень предлагаемого способа виброиспытаний подтверждается двумя существенно новыми признаками:
- контрольные точки каждой пары точек располагают в одной проходящей через рабочую ось вибростенда измерительной плоскости с известными расстояниями до рабочей оси вибростенда, выбранными в зависимости от конструктивных особенностей системы ВПИ;
- синфазные составляющие в одновременно измеряемых сигналах каждой пары контрольных точек, расположенных в одной измерительной плоскости, выделяют среднеарифметическим усреднением с коррекцией мгновенных текущих значений указанных сигналов с помощью весовых коэффициентов, которые определяются заранее по впервые предложенному алгоритму.
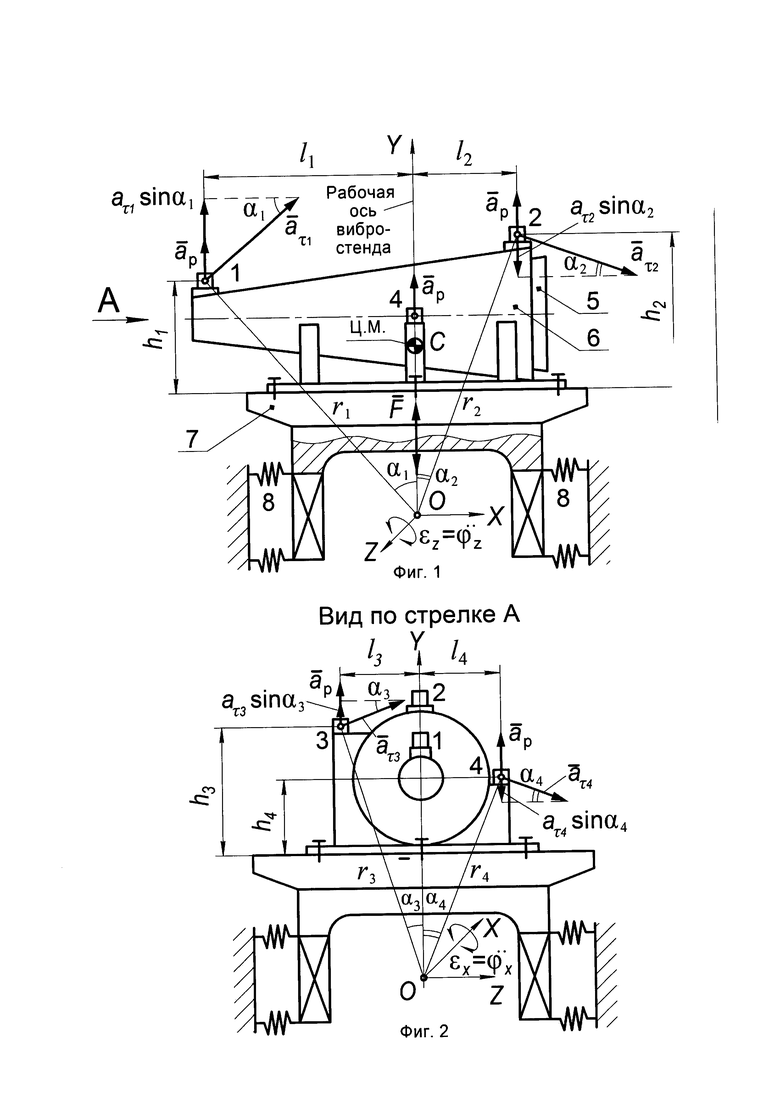
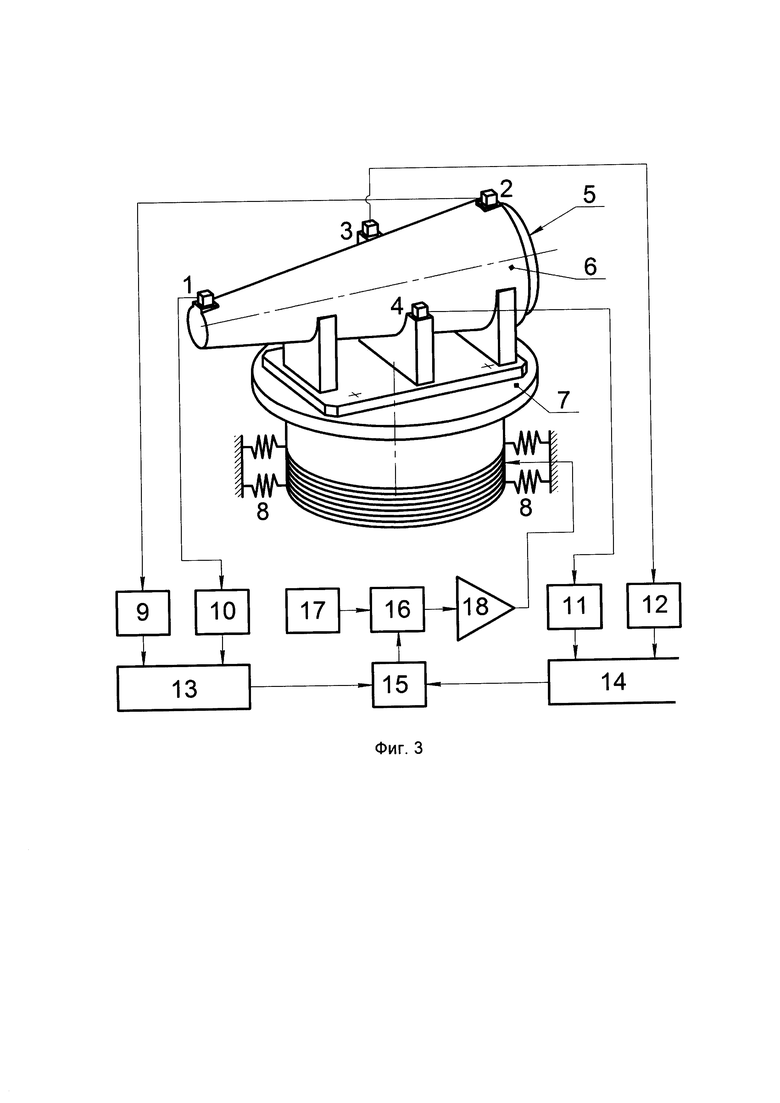
Сущность изобретения поясняется с помощью конструктивной схемы системы ВПИ с четырьмя контрольными точками 1, 2, 3 и 4, показанной на фиг. 1 и 2. На фиг. 3 представлена функциональная схема реализации предлагаемого способа с помощью известных устройств, используемых при многоточечном управлении воспроизведением гармонической вибрации.
Пусть виброиспытаниям на воздействие гармонической вибрации с многоточечным управлением однокомпонентным электродинамическим вибростендом необходимо подвергнуть изделие 5, закрепленное в переходном приспособлении 6 (фиг. 1). В силу конструктивных особенностей изделия 5 и приспособления 6 контрольные точки 1 и 2 выбирают на разной высоте (h1 ≠ h2) от стола вибростенда и с различными расстояниями  от рабочей оси вибростенда OY. Конструкция переходного приспособления 6 вынуждает выбирать контрольные точки 3 и 4 на разной высоте (h3 ≠ h4), но с одинаковыми расстояниями от рабочей оси вибростенда OY
от рабочей оси вибростенда OY. Конструкция переходного приспособления 6 вынуждает выбирать контрольные точки 3 и 4 на разной высоте (h3 ≠ h4), но с одинаковыми расстояниями от рабочей оси вибростенда OY 
В контрольных точках 1, 2, 3 и 4 устанавливают одноименные однокомпонентные ВИП так, что их измерительные оси параллельны рабочей оси вибростенда, совпадающей с осью OY. Контрольные точки 1 и 2 и измерительные оси ВИП 1 и ВИП 2 лежат в измерительной плоскости YOX, которая ортогональна измерительной плоскости YOZ, в которой располагают контрольные точки 3 и 4 и измерительные оси ВИП 3 и ВИП 4. Линия пересечения плоскостей YOX и YOZ совпадает с рабочей осью вибростенда.
Переходное приспособление 6 с изделием 5 крепят к столу подвижной части вибростенда 7, присоединенного с помощью упругого подвеса 8 к его неподвижной части. Упругий подвес 8 обладает осевой симметрией. Центр жесткости упругого подвеса лежит на рабочей оси OY вибростенда.
При конструировании приспособления 6 и узлов крепления в нем изделия 5, а также мест крепления приспособления 6 к подвижной части вибростенда 7 необходимо стремиться к тому, чтобы общий центр масс системы ВПИ лежал на рабочей оси вибростенда (точка С на фиг. 1).
При возбуждении гармонической вибрации подвижная часть вибростенда 7 с закрепленными на ней приспособлением 6 с изделием 5 (система ВПИ) под действием вибровозбуждающей силы F совершает управляемые прямолинейные вибрации с рабочим ускорением ар. Кроме того, в отдельных резонансных поддиапазонах в рабочем диапазоне частот возбуждаются интенсивные паразитные угловые колебания испытуемого изделия в составе системы ВПИ. Такие угловые колебания обычно возникают на частотах выше 100 Гц и имеют малые угловые амплитуды (не более 0,5°), поэтому в линейном приближении их можно считать плоскими, происходящими в двух взаимно ортогональных плоскостях и достигающих резонансов, как правило, в различных поддиапазонах частот.
При наличии паразитных угловых колебаний системы ВПИ в плоскости YOX виброизмерительные преобразователи ВИП 1 и ВИП 2 будут регистрировать ускорения


где ар1=ар2=ар - синфазные составляющие виброускорений в контрольных точках 1 и 2, равные рабочему виброускорению ар прямолинейного поступательного движения испытуемого изделия в составе системы ВПИ;
 - касательные ускорения в контрольных точках 1 и 2, вызванные паразитными угловыми колебаниями системы ВПИ с угловым ускорением
- касательные ускорения в контрольных точках 1 и 2, вызванные паразитными угловыми колебаниями системы ВПИ с угловым ускорением  где ±ϕz - угол поворота при паразитных угловых колебаниях вокруг оси OZ (фиг. 1):
где ±ϕz - угол поворота при паразитных угловых колебаниях вокруг оси OZ (фиг. 1):


где r1 и r2 - расстояния от центра О жесткости упругого подвеса до контрольных точек 1 и 2 соответственно;
α1 и α2 - углы между рабочей осью вибростенда и линиями, соединяющими центр жесткости О упругого подвеса с контрольными точками 1 и 2 соответственно.
Учитывая, что  и
и  из (1) - (4) получим
из (1) - (4) получим


Если при  усреднять сигналы ВИП в соответствии с прототипом, то из (5) и (6) получим
усреднять сигналы ВИП в соответствии с прототипом, то из (5) и (6) получим

Из (7) следует, что при усреднении без весовых коэффициентов усредненный сигнал, соответствующий (а1+а2)/2, будет содержать паразитную составляющую  искажающую истинный сигнал управления, соответствующий синфазным составляющим мгновенных текущих значений сигналов контрольных точек 1 и 2 (ар=ар1=ар2).
искажающую истинный сигнал управления, соответствующий синфазным составляющим мгновенных текущих значений сигналов контрольных точек 1 и 2 (ар=ар1=ар2).
Если использовать операцию среднеарифметического усреднения с использованием весовых коэффициентов k1 и k2, то с учетом (5) и (6) получим:

где аср - усредненное значение ускорения с учетом систематической ошибки, которую можно устранить (аср=ар), если, как следует из (8), принять

Из решения уравнений (9) получаем формулы для вычисления весовых коэффициентов:

Проверяем, подставляя (10) в (8):

Аналогичный результат получается при усреднении мгновенных текущих значений сигналов ВИП 3 и ВИП 4, установленных в другой паре контрольных точек 3 и 4, расположенных в измерительной плоскости YOZ на одинаковом расстоянии от рабочей оси вибростенда, но на разной высоте h3 ≠ h4 (фиг. 2). В этом случае весовые коэффициенты находят по формулам:

При  из (12) следует, что k3=k4, и среднеарифметическое усреднение мгновенных значений сигналов ВИП 3 и ВИП 4, установленных на разной высоте относительно стола вибростенда, производится без коррекции с единичными весовыми коэффициентами k3=k4=1.
из (12) следует, что k3=k4, и среднеарифметическое усреднение мгновенных значений сигналов ВИП 3 и ВИП 4, установленных на разной высоте относительно стола вибростенда, производится без коррекции с единичными весовыми коэффициентами k3=k4=1.
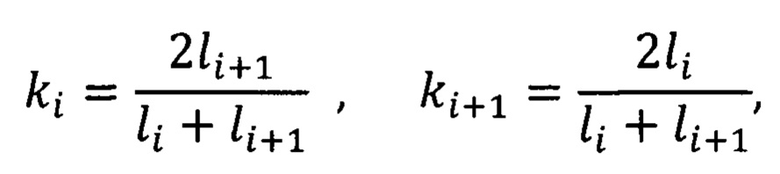
Таким образом, в общем виде весовые коэффициенты определяют по формулам:

где i и (i+1) - номера двух контрольных точек, расположенных в одной плоскости с рабочей осью вибростенда по разные стороны от этой оси;
ki и ki+1 - весовые коэффициенты для i-ой и i+1 контрольных точек;
 и
и  - расстояния соответственно от i-ой и i+1 контрольных точек до рабочей оси вибростенда.
- расстояния соответственно от i-ой и i+1 контрольных точек до рабочей оси вибростенда.
Предлагаемый способ осуществляется с помощью известного технического устройства, предложенного в прототипе (а.с. 1227962), дополненного задатчиками весовых коэффициентов (фиг. 3).
Выходы ВИП 1 и ВИП 2, ВИП 3 и ВИП 4 подключают через задатчики весовых коэффициентов 9 и 10, 11 и 12 к усреднителям 13 и 14. Эти усреднители в полном соответствии с прототипом выполняют операции суммирования и деления двух одновременно измеряемых сигналов на два после их коррекции с помощью весовых коэффициентов, определенных заранее по указанным выше формулам. Последующие операции выполняются так же, как и в прототипе, аналогичными устройствами.
В качестве задатчиков весовых коэффициентов можно использовать, например, усилители-формирователи сигналов (см. Справочник по пьезоэлектрическим акселерометрам и предусилителям. Фирма Брюль и Къер. Дания. 1987. Приложение D, тип 2626 или 2635).
При виброиспытаниях мгновенные текущие значения сигналов ВИП 1 и ВИП 2, ВИП 3 и ВИП 4 проходят через задатчики весовых коэффициентов 9 и 10, 11 и 12 и поступают на входы усреднителей 13 и 14. Выходные сигналы усреднителей 13 и 14, соответствующие синфазным составляющим сигналов указанных ВИП, поступают на входы селектора 15. Этот селектор
выдает на выходе либо максимальный сигнал, сформированный из выходных сигналов усреднителей 13 и 14, либо определяет среднеарифметическое значение тех же сигналов. Выходной сигнал селектора 15 как сигнал обратной связи подается на управляющий вход автоматического регулятора уровня 16, на второй вход того же регулятора 16 подаются электрические гармонические колебания с параметрами, заданными программой испытаний, от задающего генератора 17. Выходной сигнал регулятора 16 поступает через усилитель мощности 18 в катушку подвижной части однокомпонентного электродинамического вибростенда 7, где преобразуется в электродинамическую вибровозбуждающую силу.
Таким образом, предлагаемый способ виброиспытаний изделий реализуется с помощью известного устройства-прототипа, дополненного задатчиками весовых коэффициентов 9 и 10, 11 и 12, которые используются по их прямому назначению.
Предлагаемый способ позволяет повысить точность и достоверность виброиспытаний многорезонансных изделий при многоточечном управлении воспроизведением гармонической вибрации на однокомпонентных электродинамических вибростендах в общем случае любого попарного расположения контрольных точек в измерительных плоскостях с известными расстояниями по разные стороны от рабочей оси вибростенда за счет исключения из сигнала управления систематических ошибок от паразитных угловых вибраций испытуемого изделия в составе системы «подвижная часть вибростенда - переходное приспособление - изделие».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2729980C1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ОБЪЕКТА НА ЭЛЕКТРОДИНАМИЧЕСКОМ ВИБРОСТЕНДЕ | 2022 |
|
RU2784480C1 |
| Способ виброиспытаний изделий | 1989 |
|
SU1753321A1 |
| Способ виброиспытаний изделий и устройство для его осуществления | 1983 |
|
SU1227962A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРОСТЕНД | 2014 |
|
RU2572070C1 |
| Способ виброиспытаний изделий | 1988 |
|
SU1516488A1 |
| ВИБРОСТЕНД | 1996 |
|
RU2118806C1 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКИХ АППАРАТОВ | 1998 |
|
RU2171974C2 |
| СПОСОБ УПРАВЛЕНИЯ СПЕКТРОМ ВОЗБУЖДАЕМОЙ СЛУЧАЙНОЙ ОДНОМЕРНОЙ ВИБРАЦИИ | 1997 |
|
RU2129259C1 |
| ВИБРОСТЕНД | 2010 |
|
RU2441213C1 |
Изобретение относится к виброметрии. Способ виброиспытаний изделий заключается в том, что воспроизводимую на однокомпонентном электродинамическом вибростенде гармоническую вибрацию измеряют одновременно в четном количестве контрольных точек, лежащих попарно в каждой из взаимно ортогональных пересекающихся плоскостей по разные стороны от линии пересечения плоскостей, совпадающей с рабочей осью вибростенда. Из мгновенных значений сигналов каждой пары контрольных точек выделяют синфазные составляющие, которые используют для формирования сигнала обратной связи. Контрольные точки каждой пары точек располагают в одной из пересекающихся взаимно ортогональных плоскостей с известными расстояниями до рабочей оси вибростенда, выбранными в зависимости от конструктивных особенностей крепления изделия к вибростенду, из мгновенных текущих значений одновременно измеряемых сигналов каждой пары контрольных точек, расположенных в одной из пересекающихся плоскостей, но не менее чем для двух различных пар точек находят синфазные составляющие с помощью усреднения указанных сигналов с весовыми коэффициентами, которые определяют по заданным формулам. Технический результат - повышение измерений. 3 ил.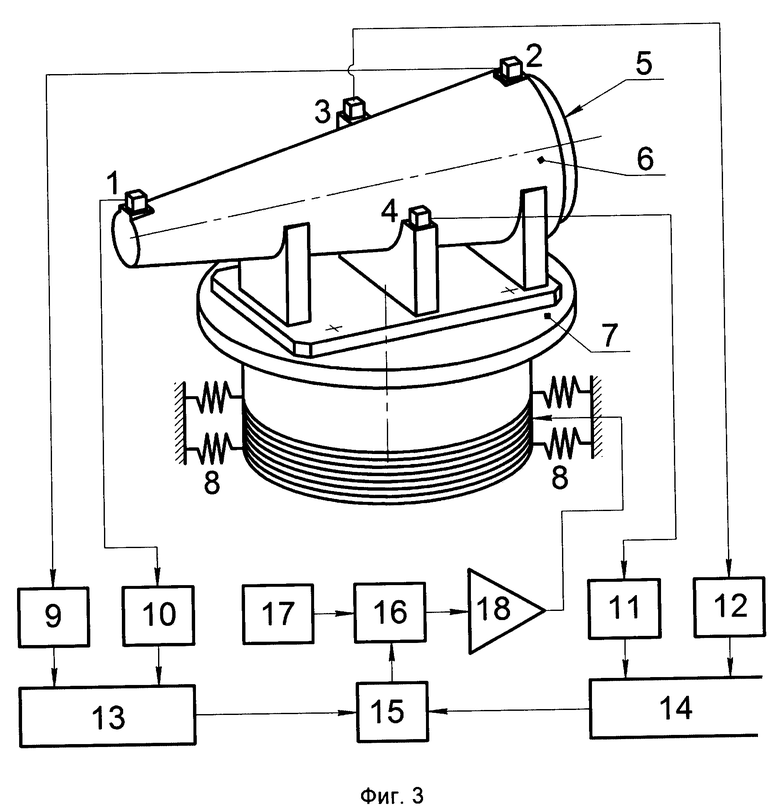
Способ виброиспытаний изделий, заключающийся в том, что воспроизводимую на однокомпонентном электродинамическом вибростенде гармоническую вибрацию измеряют одновременно в четном количестве контрольных точек, лежащих попарно в каждой из взаимно ортогональных пересекающихся плоскостей по разные стороны от линии пересечения плоскостей, совпадающей с рабочей осью вибростенда, из мгновенных текущих значений сигналов каждой пары контрольных точек выделяют синфазные составляющие, которые используют для формирования сигнала обратной связи, отличающийся тем, что контрольные точки каждой пары точек располагают в одной из пересекающихся взаимно ортогональных плоскостей с известными расстояниями до рабочей оси вибростенда, выбранными в зависимости от конструктивных особенностей крепления изделия к вибростенду, из мгновенных текущих значений одновременно измеряемых сигналов каждой пары контрольных точек, расположенных в одной из пересекающихся плоскостей, но не менее чем для двух различных пар точек находят синфазные составляющие с помощью усреднения указанных сигналов с весовыми коэффициентами, которые определяют по формулам
где i и (i+1) - номера двух контрольных точек, расположенных в одной плоскости с рабочей осью вибростенда по разные стороны от этой оси;
ki и ki+1 - весовые коэффициенты для i-й и i+1 контрольных точек;
 и
и  - расстояния соответственно от i-й и i+1 контрольных точек до рабочей оси вибростенда.
- расстояния соответственно от i-й и i+1 контрольных точек до рабочей оси вибростенда.
| Эдвабник В.Г | |||
| МЕТОДИКА ВЫБОРА УСЛОВНОЙ ТОЧКИ УПРАВЛЕНИЯ ДЛЯ ПОВЫШЕНИЯ ДОСТОВЕРНОСТИ И КАЧЕСТВА ВИБРАЦИОННЫХ ИСПЫТАНИЙ | |||
| Интерэкспо Гео-Сибирь | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| С | |||
| Индукционная катушка | 1920 |
|
SU187A1 |
| Способ виброиспытаний изделий и устройство для его осуществления | 1983 |
|
SU1227962A1 |
| CN 106500940 A, 15.03.2017 | |||
| KR 100887737 B1, 12.03.2009 | |||
| CN 101464472 A, 24.06.2009 | |||
| US 2006230829 A1, 19.10.2006 | |||
| CN 108761133 A, 06.11.2018 | |||
| US | |||

