Изобретение относится к области способов виброиспытаний и испытательной техники, используемых для воспроизведения широкополосной случайной вибрации (ШСВ) с многоточечным управлением режимами виброиспытаний в диапазоне частот до 2000 Гц и более.
Такие способы и устройства широко используют при виброиспытаниях на однокомпонентных электродинамических вибростендах многорезонансных изделий, жестко закрепленных с помощью переходного приспособления в определенном положении на столе подвижной части вибростенда. К многорезонансным изделиям, в частности, относятся сложная бортовая аппаратура и приборы, которые имеют не менее трех-четырех резонансов в рабочем диапазоне частот.
При многоточечном управлении воспроизведением ШСВ на электродинамическом вибростенде сигнал обратной связи формируется в воображаемой контрольной точке по сигналам с нескольких реальных контрольных точек, которые, как правило, выбирают на переходном приспособлении вблизи мест крепления испытуемого изделия.
В реальных контрольных точках установлены однокомпонентные пьезоэлектрические виброизмерительные преобразователи (ВИП), которые измеряют виброускорения в этих точках как функции времени в направлении рабочей оси вибростенда.
Режимы ШСВ задают и используют при воспроизведении на вибростендах в виде зависимостей частотных составляющих спектральной плотности ускорения (мощности) от частоты (спектров СПУ).
Для перехода к спектру СПУ виброускорение как случайную функцию времени представляют в виде суммы гармонических составляющих со случайными амплитудами, которые при формировании спектра СПУ переводят в аналогичные частотные составляющие этого спектра, уровни которых приближенно равны отношению квадрата среднеквадратичного значения виброускорения в узкой полосе частот к ширине этой полосы (Глудкин О.П. Методы и устройства испытаний РЭС и ЭВС - М.: Высшая школа, 1991. С. 108; ГОСТ 31419-2010, п. 3.14).
В дальнейшем спектр СПУ, найденный по зависимости виброускорения от времени в одной реальной контрольной точке, будем называть канальным спектром СПУ. При усреднении частотных составляющих различных спектров СПУ в одних и тех же узких полосах частот получают усредненный спектр СПУ, характеризующий ШСВ в воображаемой контрольной точке.
При виброиспытаниях изделие подвергается случайной вибрации в составе механической колебательной системы «подвижная часть вибростенда - переходное приспособление - испытуемое изделие» (система ВПИ) на упругом подвесе вибростенда.
В идеальном случае в системе ВПИ места крепления изделия на приспособлении и контрольные точки возле них должны совершать одинаковые (синфазные) прямолинейные случайные колебания параллельно рабочей оси вибростенда (рабочие вибрации).
В реальных условиях при виброиспытаниях сложных многорезонансных изделий в некоторых поддиапазонах рабочего диапазона частот возбуждаются интенсивные пространственные случайные вибрации системы ВПИ, поэтому через узлы крепления изделиям передаются существенно различные по уровням и направлению вибрационные воздействия. В результате одни части изделий значительно переиспытываются, а другие недоиспытываются в рабочем направлении. Кроме того, испытуемые изделия в составе системы ВПИ подвергаются интенсивным паразитным поперечным вибрациям.
Для уменьшения динамических искажений испытательных режимов ШСВ (неравномерности распределения СПУ в реальных контрольных точках в рабочем направлении и уровней паразитных поперечных вибраций испытуемых изделий) используют два способа (стратегии) многоточечного управления по среднему значению сигналов, измеренных в нескольких реальных контрольных точках без коррекции и с коррекцией с помощью весовых коэффициентов.
Далее будем рассматривать второй, более общий способ управления воспроизведением ШСВ со среднеарифметическим усреднением сигналов, измеряемых в выбранных контрольных точках, с учетом весовых коэффициентов. Первый способ является, по существу, частным случаем второго способа, если принять все весовые коэффициенты одинаковыми.
Аналогом предполагаемого изобретения является способ виброиспытаний на ШСВ и устройство для его осуществления, приведенные в работе (Черепов В.Ф., Веселов Ю.В., Сумароков В.В. и др. Опыт разработки аппаратуры для автоматизации испытаний на механические воздействия. ЛДНТП, 1982. С. 12-24).
Способ-аналог многоточечного управления ШСВ в режиме усреднения с коррекцией реализуется с использованием от двух до восьми выбранных реальных контрольных точек. О расположении этих точек имеются только общие указания о том, что их нужно размещать вблизи точек крепления испытуемых изделий.
В способе-аналоге сигналы о виброускорениях как функциях времени в выбранных контрольных точках передают с заданной очередностью в течение определенного цикла коммутации. При этом в течение одного цикла коммутации с одной и той же контрольной точки сигнал может быть передан многократно. Количество тактов передачи указанного сигнала в течение одного цикла коммутации определяет вес этого сигнала в контрольной точке.
Коммутацию сигналов производят в режиме последовательного опроса. Сигнал с каждой контрольной точки, переданный с выхода коммутатора в вычислительный комплекс, фильтруют, ограничивая частотный диапазон.
После фильтрации сигналы о виброускорении как функции времени в каждой контрольной точке оцифровывают и с помощью известного программного обеспечения (см. например, пакет программного обеспечения VisProbeSL, ООО «Висом», www.visom.ru) из них последовательно формируют канальные спектры СПУ, соответствующие выбранным контрольным точкам. Из этих спектров СПУ после их среднеарифметического усреднения с коррекцией получают один усредненный спектр СПУ в воображаемой контрольной точке, который используют как сигнал обратной связи.
На основе усредненного спектра СПУ и заданного в соответствии с программой испытаний опорного спектра СПУ, с помощью известного программного обеспечения синтезируют управляющий спектр СПУ. Затем этот спектр СПУ преобразуют в случайный аналоговый сигнал управления, поступающий после усиления в подвижную катушку вибростенда, в которой возбуждается ШСВ.
Описанный способ-аналог реализуется в устройстве-аналоге (Черепов В.Ф., и др. Опыт разработки аппаратуры…), состоящем из универсального вычислительного комплекса УВК-ШСВ, к внешнему входу которого подключен селектор сигнала управления с режимом усреднения.
Селектор позволяет проводить управление воспроизведением ШСВ с использованием от двух до восьми ВИП, установленных в выбранных контрольных точках. Эти ВИП подключены к входам коммутатора, входящего в состав селектора сигнала управления. Коммутатор включен в режим последовательного опроса ВИП. Веса сигналов ВИП устанавливают на программном переключателе селектора.
Выход коммутатора подключен к входу управляющего вычислительного комплекса УВК-ШСВ, содержащего последовательно соединенные согласующий усилитель, фильтры, выделяющие рабочий диапазон частот, аналого-цифровой преобразователь, цифровой анализатор спектра с усреднителем спектров, центральный процессор и процессор обратного быстрого преобразования Фурье (ОБПФ).
К центральному процессору подключено устройство ввода-вывода, выполняющее при вводе роль задающего генератора ШСВ для формирования опорного спектра СПУ. На основе усредненного и опорного спектров СПУ в центральном процессоре синтезируют управляющий спектр СПУ.
К выходу центрального процессора присоединен процессор ОБПФ и цифроаналоговый преобразователь, преобразующие управляющий спектр СПУ в соответствующий аналоговый сигнал, который через внешний выход УВК-ШСВ подают после усиления в подвижную катушку вибростенда, где и возбуждается ШСВ.
Основные недостатки способа-аналога заключаются в следующем:
1. Отсутствуют конкретные предложения о выборе местоположения контрольных точек и числовых значений весовых коэффициентов сигналов в этих точках, которые позволяют обеспечить наименьшие искажения заданных режимов ШСВ при их воспроизведении.
2. Использована последовательная схема цифрового преобразования виброускорений в канальные спектры СПУ с последующим усреднением указанных спектров. Это позволяет сократить материальные затраты при реализации схемы, но при этом существенно возрастает время задержки формирования сигнала в цепи управления, что приводит к значительному различию между наблюдаемыми и истинными спектрами СПУ и в конечном счете к существенному ухудшению воспроизводимости ШСВ (ГОСТ 30630.1.9-2015, п. 4.1, 4.3).
3. В отдельных частотных поддиапазонах рабочего диапазона частот возникают существенные динамические искажения режимов ШСВ (неравномерность распределения уровней вибрации в контрольных точках и уровни паразитных поперечных вибраций изделий) из-за паразитных угловых колебаний системы ВПИ.
Динамические искажения режимов воспроизведения ШСВ при виброиспытаниях сложных многорезонансных изделий могут составлять сотни процентов. Например, при виброиспытаниях многорезонансных изделий с массой более 10 кг и габаритами в каждом измерении от 200 до 500 мм уровни спектральной плотности ускорений (СПУ) в рабочем направлении в различных контрольных точках могут различаться в четыре раза (±6 дБ) относительно заданного уровня. Паразитные поперечные вибрации могут превышать рабочие вибрации почти в три раза (до 5 дБ) (табл. 1 ГОСТ РВ 20.57.305-98).
Одной из основных причин больших динамических искажений режимов ШСВ при многоточечном управлении их воспроизведением является пространственная неустойчивость управляемых прямолинейных (рабочих) вибраций системы ВПИ.
Система ВПИ с точки зрения динамики в рабочем диапазоне частот, обычно 10-2000 Гц, представляет собой колебательную систему с несколькими степенями свободы в виде составного несущего тела на упругом осесимметричном подвесе, содержащего внутри колеблющиеся элементы (осцилляторы). Центры масс системы ВПИ в целом и ее составных частей лежат выше центра жесткости упругого подвеса.
В указанных колебательных системах при возбуждении прямолинейных колебаний по одной из обобщенных координат возникают пространственные колебания вследствие перераспределения («перекачки») части энергии колебаний по другим координатам из-за инерционных связей между различными кинематически независимыми движениями системы, соответствующими этим координатам.
Система ВПИ, как колебательная система, кроме управляемых прямолинейных рабочих вибраций в некоторых частотных поддиапазонах совершает интенсивные паразитные угловые (маятниковые) колебания в двух взаимно ортогональных плоскостях. Такие частотные поддиапазоны для краткости будем называть резонансными.
Для испытуемых изделий с приспособлениями, имеющих суммарную массу одного порядка с массой подвижной части вибростенда, резонансные частотные поддиапазоны обычно лежат выше 200 Гц. При этом максимальные угловые амплитуды паразитных угловых колебаний системы ВПИ составляют менее одной десятой доли градуса, что позволяет рассматривать пространственные колебания системы ВПИ в линейном приближении. Паразитные угловые (поперечные) колебания достигают максимумов в областях резонансов элементов (осцилляторов) внутри системы ВПИ, резонансных угловых колебаний составных частей системы ВПИ относительно центра жесткости упругого подвеса вибростенда или центров жесткости, расположенных в затянутых стыках системы ВПИ (Остроменский П.И. Анализ причин поперечных колебаний при виброиспытаниях аппаратуры на электродинамических стендах // Проблемы машиностроения. Респ. межвед. сборник, Киев: Наукова думка, 1982. Вып. 15. С. 39-43).
Искажения режимов воспроизведения ШСВ в системе ВПИ и устройство, позволяющее устранить эти искажения, иллюстрируются на фиг. 1 и 2.
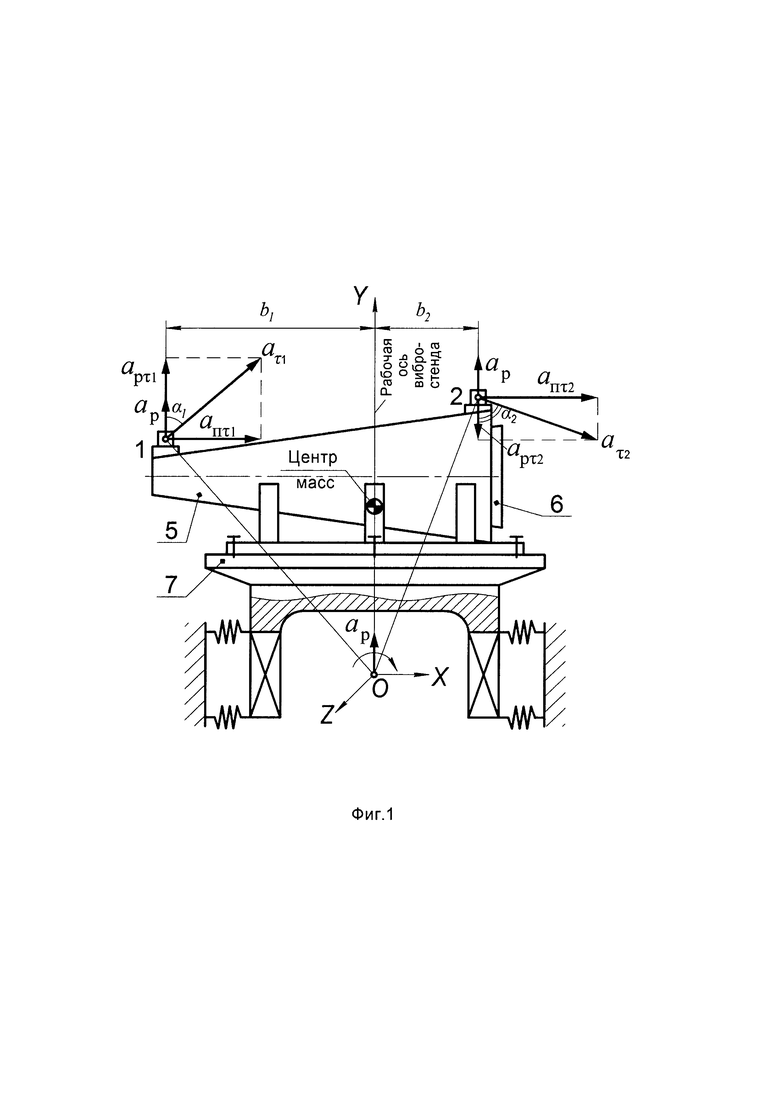
На фиг. 1 приведена конструктивная и расчетная схема системы ВПИ, позволяющая в наглядной форме разобраться с причинами искажений режимов ШСВ и раскрыть сущность предлагаемого способа устранения указанных искажений. На фиг. 2 показана функциональная схема устройства, позволяющая осуществить предлагаемый способ виброиспытаний.
На схеме (фиг. 1) показаны однокомпонентные ВИП 1 и 2, установленные в контрольных точках 1 и 2. Измерительные оси ВИП 1 и 2 параллельны рабочей оси вибростенда и лежат в одной плоскости с этой осью. Плоскость, в которой расположены две контрольные точки вместе с рабочей осью вибростенда, но по разные стороны от этой оси, будем далее называть для краткости измерительной.
Система ВПИ включает в себя переходное приспособление 5 с закрепленным в нем испытуемым изделием 6 и подвижную часть вибростенда 7. Все указанные составные части системы ВПИ неподвижно скреплены между собой. При этом подвижная часть вибростенда 7 соединена с его неподвижной частью с помощью упругого подвеса, условно показанного на схеме с помощью пружинных элементов. Центр жесткости упругого подвеса (точка О) расположен ниже центра масс системы ВПИ.
При воспроизведении случайной вибрации на выходе каждого ВИП получают одну реализацию - неслучайную функцию времени (Вентцель Е.С., Овчаров Л.А. Теория случайных процессов и ее инженерные приложения - М: Высш. шк., 2000, с. 13, текст около рис. 1.1.1). Указанная функция времени представляет собой общее виброускорение, измеряемое однокомпонентным ВИП в i-ой реальной контрольной точке в рабочем направлении при наличии паразитных угловых вибраций системы ВПИ. Это виброускорение можно представить в виде алгебраической суммы двух компонент (см. фиг. 1):

где ai(t) - общее виброускорение, измеряемое ВИП в i-й контрольной точке в рабочем направлении, параллельном рабочей оси вибростенда, вдоль которой действует вибровозбуждающая сила;
 - рабочее виброускорение, соответствующее управляемой прямолинейной вибрации всех точек системы ВПИ, как абсолютно твердого тела, вдоль рабочей оси вибростенда;
- рабочее виброускорение, соответствующее управляемой прямолинейной вибрации всех точек системы ВПИ, как абсолютно твердого тела, вдоль рабочей оси вибростенда;
 - проекция на измерительную ось ВИП касательного ускорения
- проекция на измерительную ось ВИП касательного ускорения  в i-й контрольной точке, вызванного паразитными угловыми колебаниями системы ВПИ (скрытая систематическая ошибка измерения рабочего виброускорения); αi - острый угол между линией действия вектора касательного ускорения
в i-й контрольной точке, вызванного паразитными угловыми колебаниями системы ВПИ (скрытая систематическая ошибка измерения рабочего виброускорения); αi - острый угол между линией действия вектора касательного ускорения  и измерительной осью ВИП, параллельной рабочей оси вибростенда.
и измерительной осью ВИП, параллельной рабочей оси вибростенда.
Проекции касательных виброускорений на измерительные оси ВИП (apτi) в противолежащих контрольных точках 1 и 2, расположенных в одной измерительной плоскости (скрытые систематические ошибки измерения рабочего виброускорения ар), всегда имеют противоположные знаки и различные модули, если они расположены на разных расстояниях от рабочей оси вибростенда (+арτ1, - арτ2). Паразитные поперечные виброускорения, измеренные в i-й контрольной точке в направлении, ортогональном рабочему направлению, будут равны aτi(t) sin а1=aпτi.
Указанные зависимости вытекают из физических кинематических закономерностей, которые справедливы при пространственных колебаниях абсолютно твердых тел в двух взаимно ортогональных направлениях.
При упругих колебаниях контура крепления испытуемого изделия на приспособлении в системе ВПИ зависимость (1) справедлива для движения всех точек контура как абсолютно твердого тела. При этом могут появиться дополнительные систематические ошибки, связанные с относительными упругими колебаниями контура крепления испытуемого изделия в составе системы ВПИ (Остроменский П.И. Вибрационные испытания радиоаппаратуры и приборов. - Новосибирск: Изд-во Новосиб. ун-та, 1992, с. 138-150).
Основной недостаток способа-аналога многоточечного управления ШСВ заключается в том, что при формировании канальных спектров СПУ используют исходные сигналы ВИП, содержащие скрытые систематические ошибки (apτi), вызванные паразитными угловыми колебаниями испытуемого изделия в составе системы ВПИ. Эти ошибки переходят в канальные спектры СПУ и не устраняются при усреднении указанных спектров СПУ.
В результате управление воспроизведением ШСВ ведется по смеси полезного сигнала (ар), соответствующего управляемой прямолинейной (рабочей) вибрации и паразитному сигналу (apτi), возникающему из-за угловых колебаний системы ВПИ, что и приводит к существенным искажениям заданных режимов виброиспытаний в отдельных резонансных поддиапазонах частот, где доминируют паразитные угловые колебания системы ВПИ.
Основной недостаток устройства-аналога заключается в том, что отсутствуют специальные устройства для исключения искажений режимов ШСВ, вызванных паразитными угловыми колебаниями системы ШСВ.
Ближайшим аналогом (прототипом) предлагаемого способа виброиспытаний изделий является способ (стратегия) многоточечного управления воспроизведением ШСВ с использованием усреднения с коррекцией сигналов, полученных с выбранных контрольных точек (ГОСТ 31419-2010 (п.5.3.1.2) и ГОСТ 30630.1.9-2015 (п.5.1,5.3, п.8)).
О расположении указанных точек имеются только общие указания о том, что положение этих точек должно быть определено в соответствующей нормативной документации. Со всех выбранных контрольных (проверочных) точек снимают одновременно зависимости общих виброускорений (1) от времени, которые оцифровывают и затем вычисляют с помощью известного программного обеспечения канальные спектры СПУ.
По канальным спектрам СПУ формируют также вычислением усредненный спектр СПУ с учетом весовых коэффициентов. На основе этого спектра СПУ как сигнала обратной связи и заданного (опорного) спектра СПУ, соответствующего программе виброиспытаний, синтезируют с помощью известного программного обеспечения управляющий спектр СПУ, который преобразуют в аналоговый сигнал управления, передаваемый после усиления в подвижную катушку вибростенда.
Скрытые систематические ошибки, входящие в состав общих виброускорений (1) и преобразованные в частотную форму в канальных спектрах СПУ, переходят из этих спектров в усредненный спектр СПУ и затем в аналоговый сигнал управления, где указанные систематические ошибки резко возрастают в резонансных частотных поддиапазонах, что приводит к существенным динамическим искажениям программных режимов ШСВ.
Таким образом, основной недостаток способа-прототипа заключается в том, что при формировании сигнала обратной связи в способе-прототипе используют исходные сигналы, не освобожденные от скрытых систематических ошибок (apτi), вызванных паразитными угловыми колебаниями испытуемого изделия в составе системы ВПИ.
В резонансных поддиапазонах рабочего диапазона частот скрытые систематические ошибки (арτi) резко возрастают не только за счет резонансов в системе ВПИ, но и дополнительно за счет возведения в квадрат указанных ошибок, входящих в общие виброускорения (1), при вычислении частотных составляющих в канальных спектрах СПУ.
Для осуществления способа-прототипа используют вибрационную установку с цифровой многоточечной системой управления воспроизведением случайной вибрации (ГОСТ 30630.1.9-2015, п. 8, рис. 4).
Вибрационная установка включает в себя вибростенд, усилитель мощности, цифровую систему управления воспроизведением случайной вибрации, содержащую контроллер, соединенный с управляющим персональным компьютером (ПК) и монитором.
Испытуемое изделие с помощью переходного приспособления закреплено на столе подвижной части вибростенда. На приспособлении в контрольных точках закреплены пьезоэлектрические вибропреобразователи (ВИП), подключенные к измерительным входам контроллера. Управляющий выход контроллера подключен через усилитель мощности к подвижной катушке, жестко соединенной с подвижной частью вибростенда. Контур автоматического управления воспроизведением ШСВ с использованием обратной связи включает в себя контроллер с ПК, усилитель мощности с вибростендом и ВИП в контрольных точках.
Устройство-прототип работает следующим образом. Заданный (опорный) спектр СПУ, соответствующий программе виброиспытаний, формируют в ПК с визуализацией на мониторе и передают в контроллер. При возбуждении ШСВ на измерительные входы контроллера с ВИП, установленных в реальных контрольных точках, поступают сигналы, соответствующие мгновенным значениям общих виброускорений (1) в указанных точках и содержащие скрытые систематические ошибки из-за паразитных угловых колебаний системы ВПИ.
В контроллере с помощью специального программного обеспечения сигналы ВИП со скрытыми систематическими ошибками как функции времени параллельно оцифровывают и преобразуют в канальные спектры СПУ. Из этих спектров СПУ со скрытыми систематическими ошибками в частотной форме вычисляют усредненный спектр СПУ как сигнал обратной связи, также содержащий указанные ошибки в частотной форме.
На основе усредненного спектра СПУ и сформированного в ПК заданного спектра СПУ в контроллере синтезируют с помощью известного программного обеспечения управляющий спектр СПУ, затем преобразуют его в аналоговый сигнал, содержащий преобразованные систематические ошибки, которые вместе с полезным сигналом поступают через усилитель мощности в подвижную катушку вибростенда.
В устройстве-прототипе не предусмотрены устройства, устраняющие скрытые систематические ошибки в сигналах ВИП из-за паразитных угловых колебаний системы ВПИ. В результате управление воспроизведением ШСВ в резонансных поддиапазонах рабочего диапазона частот ведется по сигналам, в которых доминируют указанные ошибки. Вследствие этого в указанных поддиапазонах возникают значительные динамические искажения, нередко превышающие заданные уровни ШСВ.
Задачей изобретения является повышение достоверности воспроизведения ШСВ, действующей на многорезонансные испытуемые изделия при многоточечном управлении воспроизведением случайной вибрации на однокомпонентных электродинамических вибростендах за счет существенного уменьшения искажений заданного режима виброиспытаний (неравномерности распределения СПУ в контрольных точках и паразитных поперечных вибраций испытуемых изделий).
Технический результат, который может быть получен при осуществлении изобретения, заключается в исключении из исходных сигналов ВИП, снимаемых в контрольных точках, скрытых систематических ошибок, вызванных паразитными угловыми колебаниями системы ВПИ. После этого сигналы, «очищенные» от указанных ошибок, используют для формирования усредненного спектра СПУ как сигнала обратной связи с помощью известного программного обеспечения.
Технический результат достигается следующим образом.
Предлагается способ виброиспытаний изделий, в котором ШСВ измеряют в четном количестве реальных контрольных точек кратном четырем. Точки разбивают на пары и каждую пару точек располагают в одной измерительной плоскости с рабочей осью вибростенда по разные стороны от этой оси.
Наименьшее количество контрольных точек, необходимых для реализации способа - четыре точки, расположенные в двух взаимно ортогональных измерительных плоскостях с линией пересечения, совпадающей с рабочей осью вибростенда. Это обусловлено тем, что паразитные угловые колебания системы ВПИ достигают максимумов нередко в различных резонансных поддиапазонах, так как моменты инерции при угловых колебаниях системы ВПИ во взаимно ортогональных плоскостях могут существенно отличаться друг от друга. Вследствие этого могут существенно различаться и резонансные поддиапазоны, в которых поперечные колебания системы ВПИ достигают максимума.
Пусть при воспроизведении ШСВ в ее реализации как неслучайной функции времени (Вентцель Е.С, Овчаров Л.А. Теория случайных процессов … С. 13) наряду с управляемой прямолинейной рабочей вибрацией действуют интенсивные паразитные угловые колебания системы ВПИ вокруг оси, проходящей через центр жесткости упругого подвеса (точка О) и перпендикулярной измерительной плоскости, в которой размещены две контрольные точки 1 и 2 (фиг. 1). Эти контрольные точки расположены на расстояниях b1 и b2 (b1≠b2) соответственно по разные стороны от рабочей оси вибростенда. Тогда, используя формулу (1) при арифметическом усреднении мгновенных текущих значений виброускорений, получим

где k1 и k2 - соответственно весовые коэффициенты для сигналов в точках 1 и 2, расположенных в одной измерительной плоскости; описания остальных условных обозначений те же, что и для формулы (1).
Тогда из (2) следует

Если весовые коэффициенты подобраны так, что

то скрытая систематическая ошибка от угловых колебаний системы ВПИ в одной измерительной плоскости будет устранена полностью при арифметическом усреднении сигналов первой и второй контрольных точек. Аналогично устраняют систематическую ошибку от угловых колебаний системы ВПИ в другой измерительной плоскости.
Если использовать нормированные значения весовых коэффициентов, то их сумма должна быть равна единице: k1+k2=1. Тогда, как следует из формулы (3) с учетом (4), рабочее виброускорение будет равно

При b1=b2 арτ1=арτ2, поэтому принимаем k1=k2=1/2. Если расстояния от контрольных точек до рабочей оси вибростенда различны, то, например, при b1<b2 необходимо выбирать k1>1/2 и k2<1/2, чтобы обеспечить равенство (4). Действительно, при уменьшении b1 острый угол α1 между линией действия вектора  и измерительной осью ВИП, параллельной рабочей оси вибростенда, стремится к π/2 и арτ1=аτ1 cos α1 стремится к нулю. Поэтому для выполнения равенства (4) необходимо увеличивать k1>1/2 и уменьшать k2<1/2. При b1>b2 необходимо поступать наоборот. Аналогично устраняют систематическую ошибку от паразитных угловых колебаний системы ВПИ в контрольных точках, расположенных в другой измерительной плоскости.
и измерительной осью ВИП, параллельной рабочей оси вибростенда, стремится к π/2 и арτ1=аτ1 cos α1 стремится к нулю. Поэтому для выполнения равенства (4) необходимо увеличивать k1>1/2 и уменьшать k2<1/2. При b1>b2 необходимо поступать наоборот. Аналогично устраняют систематическую ошибку от паразитных угловых колебаний системы ВПИ в контрольных точках, расположенных в другой измерительной плоскости.
Таким образом, в соответствии с предлагаемым способом из четырех неслучайных сигналов ВИП при попарном их суммировании получают два сигнала как неслучайные функции времени, «очищенные» от скрытых систематических ошибок. Далее каждую из этих неслучайных функций времени рассматриваем как реализацию случайного стационарного эргодического процесса. По этим реализациям находим «чистый» усредненный спектр СПУ как сигнал обратной связи с помощью известного программного обеспечения.
Дальнейшие операции по синтезу аналогового сигнала управления, передаваемого вибростенду, также выполняют с помощью компьютерных вычислений на основе известного программного обеспечения.
Изобретательский уровень предлагаемого способа виброиспытаний подтверждается следующими существенными признаками:
- выбирают вблизи мест крепления испытуемого изделия на переходном приспособлении не менее двух пар контрольных точек, лежащих попарно во взаимно ортогональных измерительных плоскостях с линией пересечения, совпадающей с рабочей осью вибростенда; при этом реальные контрольные точки каждой пары точек располагают в одной измерительной плоскости по разные стороны от рабочей оси вибростенда;
- выбирают нормированные весовые коэффициенты отдельно для каждой пары противолежащих контрольных точек, расположенных в одной измерительной плоскости таким образом, чтобы их сумма была равна единице; при одинаковых расстояниях указанных контрольных точек от рабочей оси вибростенда весовые коэффициенты принимают равными 1/2; если указанные расстояния различны, то принимают весовой коэффициент для точки с меньшим расстоянием до рабочей оси вибростенда больше 1/2, для контрольной точки с большим расстоянием до рабочей оси вибростенда - меньше 1/2;
- суммируют мгновенные текущие значения сигналов каждой пары противолежащих контрольных точек, расположенных в одной измерительной плоскости, с использованием нормированных весовых коэффициентов; в результате от двух пар контрольных точек получают две зависимости мгновенных текущих значений рабочих виброускорений от времени, в которых исключены систематические ошибки, вызванные паразитными угловыми колебаниями системы ВПИ;
- преобразуют одновременно две зависимости мгновенных текущих значений рабочих ускорений, «очищенные» от скрытых систематических ошибок, с помощью известного программного обеспечения в два спектра СПУ, из которых формируют один усредненный спектр СПУ как сигнал обратной связи.
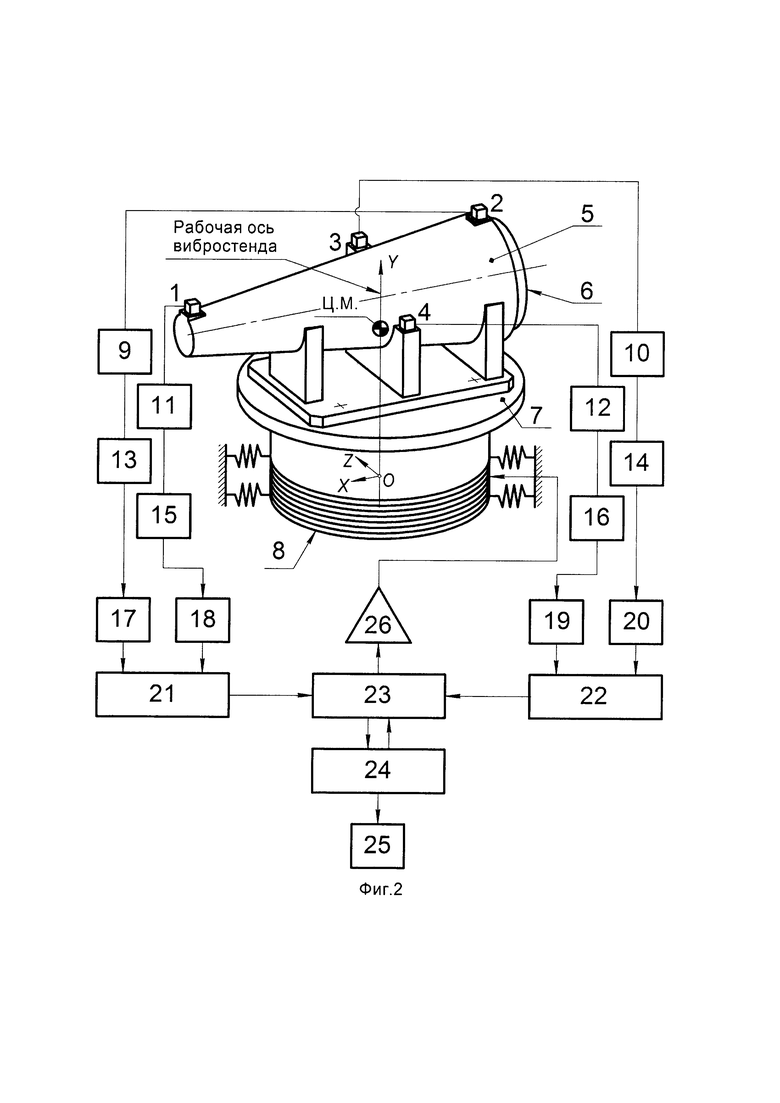
Предлагаемый способ виброиспытаний осуществляют в устройстве, техническая сущность которого поясняется с помощью функциональной схемы, показанной на фиг. 2.
Четыре виброизмерительных преобразователя (ВИП), установлены в выбранных контрольных точках 1, 2, 3, 4 на переходном приспособлении 5, в котором неподвижно закреплено испытуемое изделие 6. Контрольные точки 1 и 2 размещены в измерительной плоскости XOY, контрольные точки 3 и 4 - в измерительной плоскости YOZ. Измерительные плоскости взаимно ортогональны, линия пересечения этих плоскостей совпадает с рабочей осью вибростенда OY.
Переходное приспособление 5 с испытуемым изделием 6 закреплено на столе подвижной части вибростенда 7 с подвижной катушкой 8. Эта катушка в рабочем диапазоне частот вибростенда совершает колебательные движения как единое целое с подвижной частью вибростенда 7, соединенной с его неподвижной частью с помощью осесимметричного упругого подвеса, условно показанного в виде пружинных элементов.
Электрические выходы ВИП 1 и 2, 3 и 4 через согласующие усилители 9 и 10, 11 и 12, задатчики весовых коэффициентов 13 и 14, 15 и 16и блоки фильтров 17 и 18, 19 и 20, выделяющие рабочий диапазон частот ШСВ, присоединены к входам сумматоров аналоговых сигналов 21 и 22, в которых при сложении противофазные составляющие в сигналах ВИП, характеризующие скрытые систематические ошибки из-за паразитных угловых колебаний системы ВПИ, будут компенсировать друг друга (см. формулу 4).
Выходы сумматоров 21 и 22 подключены к двум измерительным входам контроллера 23, соединенного с управляющим персональным компьютером (ПК) 24 с монитором 25, а также через усилитель мощности с вибростендом.
На основе известного программного обеспечения по цифровой спектральной обработке аналоговых случайных сигналов времени в контроллере 23 одновременно из двух сигналов от сумматоров 21 и 22 с помощью вычислений получают два спектра СПУ, а затем из них один усредненный спектр СПУ как сигнал обратной связи в частотной форме.
С другой стороны, в ПК 24 формируют опорный спектр СПУ, соответствующий программе испытаний, и подают его также в контроллер 23, в котором из опорного спектра СПУ и усредненного спектра СПУ обратной связи синтезируют с помощью вычислений управляющий спектр СПУ. Затем этот спектр СПУ преобразуют в аналоговый сигнал управления, который подают с выхода контроллера 23 через усилитель мощности 26 в подвижную катушку 8 вибростенда, где возбуждаются случайные вибрации системы ВПИ.
Изобретательский уровень устройства, реализующего предлагаемый способ виброиспытаний с многоточечным управлением воспроизведением ШСВ, подтверждается следующими существенно новыми признаками.
Во-первых, каждые два ВИП, установленные в противолежащих контрольных точках одной измерительной плоскости, соединены через согласующие усилители, задатчики весовых коэффициентов и фильтры с одним сумматором, на выходе которого после сложения двух мгновенных текущих значений сигналов ВИП с учетом нормированных значений весовых коэффициентов получают один сигнал как функцию времени, освобожденный от скрытых систематических ошибок.
Во-вторых, выходы сумматоров подключены к измерительным входам контроллера, в котором по аналоговым сигналам сумматоров после их оцифровки и преобразования в спектры СПУ синтезируют один сигнал обратной связи в виде усредненного спектра СПУ с помощью известного программного обеспечения.
Предлагаемое устройство можно реализовать с использованием следующих известных виброизмерительных и испытательных средств.
В качестве устройства, включающего в себя согласующие усилители, задатчики весовых коэффициентов и фильтры нижних и верхних частот можно использовать, например, усилитель АР5030-4 (каталог фирмы ООО ГлобалТест «Датчиковая измерительная аппаратура», 2020, стр. 190, www.globatest.ru).
Сумматоры сигналов для попарного сложения двух мгновенных текущих значений сигналов ВИП, расположенных в одной измерительной плоскости, рекомендуется выполнять в аналоговой форме на операционных усилителях. Пример такого сумматора для четырех сигналов приведен, например, в книге Ленка Дж. Электронные схемы. Практическое руководство. М.: Мир, 1985, с. 268, 269. В предлагаемом устройстве необходимы сумматоры для двух сигналов. Для этого достаточно в указанном сумматоре принять R3=R4=0. Вместо зарубежной микросхемы МС1531 можно использовать отечественный аналог К140УД7 (Ленк Дж. Электронные схемы … С. 340).
Выходы сумматоров можно подключить, например, к измерительным входам контроллера системы управления виброиспытаниями ВС-301 (регистрационный номер 59035-14 в Государственном реестре средств измерений). Эта система в минимальной комплектации содержит один контроллер с четырьмя измерительными входами и одним выходом, который соединен через усилитель мощности с подвижной катушкой вибростенда. Кроме того, контроллер соединен с персональным компьютером и монитором.
В общем случае в системе управления ВС-301 можно использовать до восьми контроллеров с одним управляющим компьютером (Система управления виброиспытаниями ВС-301, ООО «Висом», www.visom.ru).
Для многоточечного управления воспроизведением ШСВ с помощью способов усреднения сигналов с коррекцией, поступающих на измерительные входы контроллера ВС-301, используют специальное программное обеспечение (пакет программного обеспечения VisProbeSL, ООО «Висом», www.visom.ru).
Заявляемые способ виброиспытаний изделий и устройство для его осуществления позволяют проводить многоточечное управление режимом воспроизведения ШСВ при испытаниях многорезонансных изделий по значениям сигналов ВИП, освобожденным от скрытых систематических ошибок, вызванных паразитными угловыми колебаниями системы ВПИ «подвижная часть вибростенда - приспособление - изделие».
Это позволяет существенно уменьшить динамические искажения режимов виброиспытаний (неравномерность распределения уровней вибрации в контрольных точках и уровни паразитных поперечных вибраций изделий в резонансных поддиапазонах рабочего диапазона частот).
В результате повышается достоверность стендовых виброиспытаний сложной многорезонансной аппаратуры и приборов при многоточечном управлении воспроизведением программных режимов ШСВ на однокомпонентных электродинамических вибростендах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ | 2019 |
|
RU2729175C1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ОБЪЕКТА НА ЭЛЕКТРОДИНАМИЧЕСКОМ ВИБРОСТЕНДЕ | 2022 |
|
RU2784480C1 |
| Способ виброиспытаний изделий | 1989 |
|
SU1753321A1 |
| СПОСОБ ИСПЫТАНИЙ КОСМИЧЕСКИХ АППАРАТОВ | 1998 |
|
RU2171974C2 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРОСТЕНД | 2014 |
|
RU2572070C1 |
| Устройство для испытаний на воздействие широкополосной случайной вибрации блоков радиоэлектронной аппаратуры | 2023 |
|
RU2826021C1 |
| Способ виброиспытаний изделий | 1988 |
|
SU1516488A1 |
| Устройство для преобразования виброизмерительных сигналов | 1989 |
|
SU1696927A1 |
| Вибростенд | 1982 |
|
SU1158990A1 |
| Многокоординатный вибростенд | 1985 |
|
SU1283571A1 |
Изобретение относится к области способов виброиспытаний и испытательной техники и может быть использовано для повышения достоверности испытаний технических изделий на воздействие широкополосной случайной вибрации (ШСВ) при многоточечном управлении на однокомпонентных электродинамических вибростендах. В предлагаемом способе и устройстве для его реализации каждую пару из четного количества контрольных точек располагают в одной измерительной плоскости с рабочей осью вибростенда по разные стороны от этой оси. При этом используют не менее двух пар контрольных точек, расположенных в двух взаимно перпендикулярных плоскостях с линией пересечения, совпадающей с рабочей осью вибростенда. Мгновенные текущие значения виброускорений каждой пары вибропреобразователей в двух контрольных точках в одной измерительной плоскости суммируют с использованием задатчиков весовых коэффициентов и сумматоров мгновенных текущих значений. В результате от двух пар контрольных точек получают две зависимости мгновенных текущих значений виброускорений от времени, в которых исключены систематические ошибки, вызванные паразитными угловыми колебаниями подвижной части вибростенда с закрепленным на ней испытуемым изделием. Указанные зависимости как функции времени поступают на входы контроллера системы управления виброиспытаниями, на выходе которого получают сигнал обратной связи. Технический результат заключается повышение достоверности воспроизведения ШСВ. 2 н. и 1 з.п. ф-лы, 2 ил.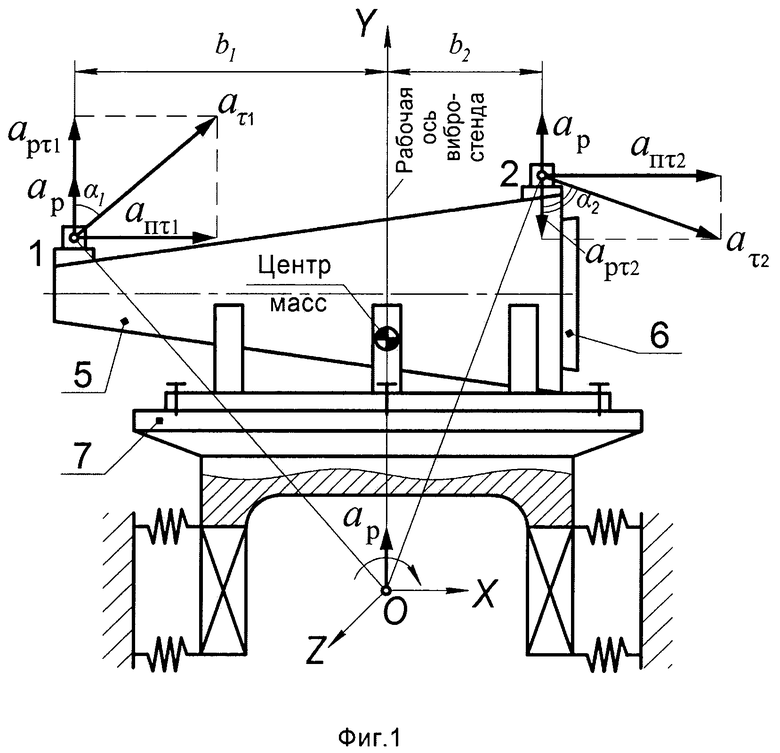
1 Способ виброиспытаний изделий, заключающийся в том, что при воспроизведении на однокомпонентном электродинамическом вибростенде широкополосной случайной вибрации (ШСВ) одновременно в нескольких реальных контрольных точках, расположенных вблизи мест крепления изделия на приспособлении, закрепленном на подвижной части вибростенда, измеряют в направлениях, параллельных рабочей оси вибростенда, виброускорения как случайные функции времени, которые оцифровывают и преобразуют расчетом с помощью программных средств в зависимости спектральной плотности ускорения от частоты (спектры СПУ) и по этим зависимостям находят в воображаемой контрольной точке усредненный спектр СПУ, который используют в качестве сигнала обратной связи при управлении воспроизведением ШСВ, отличающийся тем, что каждую пару из четного количества контрольных точек располагают в одной плоскости с рабочей осью вибростенда по разные стороны от этой оси, текущие мгновенные значения виброускорений в каждой паре противолежащих контрольных точек, расположенных в одной плоскости, умножают на нормированные значения весовых коэффициентов и суммируют полученные зависимости как функции времени для каждой пары контрольных точек, но не менее чем для двух пар, расположенных во взаимно ортогональных плоскостях, затем указанные зависимости как функции времени преобразуют расчетом в спектры СПУ и используют для формирования сигнала обратной связи.
2 Способ виброиспытаний изделий по п. 1, отличающийся тем, что для противолежащих контрольных точек, расположенных на приспособлении в одной плоскости с рабочей осью вибростенда на одинаковом расстоянии от указанной оси, весовые коэффициенты принимают одинаковыми и равными 1/2, если указанные расстояния различны, то принимают весовой коэффициент больше 1/2 для точки с меньшим расстоянием до рабочей оси вибростенда и меньше 1/2 для точки с большим расстоянием до той же оси, при этом сумма весовых коэффициентов для каждой пары указанных контрольных точек при любых расстояниях между ними должна быть равна единице.
3 Устройство для виброиспытаний изделий, содержащее систему управления виброиспытаниями, усилитель мощности и электродинамический вибростенд с закрепленным на его подвижной части приспособлением с испытуемым изделием и установленными в контрольных точках пьезоэлектрическими вибропреобразователями, подключенными через задатчики весовых коэффициентов к входящему в состав системы управления контроллеру, соединенному с управляющим персональным компьютером, содержащим программное обеспечение по цифровой спектральной обработке аналоговых сигналов вибропреобразователей, формированию из них цифрового сигнала обратной связи и синтезу в контроллере аналогового сигнала управления, передаваемого через усилитель мощности на вибростенд, отличающееся тем, что каждая пара пьезоэлектрических вибропреобразователей, установленных в контрольных точках, лежащих в одной плоскости с рабочей осью вибростенда по разные стороны от этой оси, соединена через задатчики весовых коэффициентов с одним сумматором двух мгновенных текущих значений сигналов вибропреобразователей, выходы всех сумматоров, но не менее чем для двух пар вибропреобразователей, расположенных попарно во взаимно ортогональных плоскостях, подключены к измерительным входам контроллера системы управления виброиспытаниями.
| Грейфер | 1932 |
|
SU30630A1 |
| Способ измерения ускорений объекта | 1987 |
|
SU1500946A1 |
| Устройство для виброиспытаний изделий | 1984 |
|
SU1226103A1 |
| Черепов В.Ф., Веселов Ю.В., Сумароков В.В | |||
| и др | |||
| Опыт разработки аппаратуры для автоматизации испытаний на механические воздействия | |||
| ЛДНТП, 1982 | |||
| с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |

