СЛ
СХ 00
Изобретение относится к измерительной технике и может быть использовано в системах управления вибростендами,
Цель изобретения - повьппение точности воспроизведения вибраций путем исключения систематической погрешности, возникающей в обратной связи при смещении вибродатчика от рабочей оси вибростенда из-за угло. вых колебаний подвижной части виб ростендао
На чертеже представлена схема устройства, реализующего способ
Устройство, реализующее способ, содержит последовательно соединенные генератор 1, автоматический регулятор 2 уровня, усилитель 3 мощности и вибростенд 4 на упругом подвесе 5, последовательно соединенные вибродатчик 6 и согласующий усилитель 7, выход которого подключен к второму входу автоматического регулятора 2 уровня. Вибродатчик 6 установлен рядом с элементами крепления испытьшаемого объекта 8.
Способ осуществляют следующим образом
При угловых колебаниях системы подвижная часть вибростенда - объект испытаний вокруг центра жесткости (точка О) упругого подвеса 5 вибродатчик 6 двигается с ускорением
а а р + а sino( -a iCOSiy, (1)
где ар - ускорение поступательного движения объекта испытаний в рабочем направлении (по оси Y), которое должно соз даваться электродинамической силой Fg;
a/j- - касательное ускорение, вызванное поперечными угловым колебаниями подвижной част вибростенда;
а - нормальное ускорение. При угловых колебаниях Ч 4 oS in где ifj, и S - соответственно амплитуда и частота угловых колебаний, касательное ускорение а,. Ч г, а нормальное ускорение а 4 г . Тогда
.(ап)а,, ( г , .
(я 1 ii Ч) г г г
С мат ло V г J.
где Sj, - наибольшая дуга поперечного перемещения вибродатчика 6 при угловых колебаниях подвижной части вибростенда, г - расстояние от центра жест- кости упругого подвеса 5 (тока 0) до вибродатчика 6
Возможные поперечные перемещения подвижных частей вибростендов малы, так как принимаются специальные меры по их ограничению В этом случае , и поэтому величиной а, в выражении (1) можно преребречь,
Рабочая ось V вибродатчика состаляет с линией действия вибровозбуждающей силы Fg, действующей по оси Y, угол о( о При этом наибольший искажающий фактор - касательное ускорение а составляет с рабочей осью датчика угол 90°. Если пренебречь поперечной чувствительностью датчика, которая по паспортнььм данным не превышает 5%, то можно утверждать, что вибродатчик нечувствителен к касательному ускорению а,. Сигнал датчика в этом случае пропорционален проекции векторов ускорений на линию, параллельную рабочей оси датчика:
а,
.
а cos ,
(3)
где угол 1 определяется из рических параметров системы муле
h
fV arccos
-{ъ
+ h
5
0
з
0
5
где h b расстояние от плоскости, проходящей через точку установки вибродатчика 6 и перпендикулярной рабочей оси вибростенда до центра жесткости упругого подвеса 5 подвижной части вибростенда,
расстояние от точки установки внбродатчика до рабочей оси вибростенда. Умножая величину ад сигнала датчика на коэЛйициент, равный ,
сокЫ.
получают сигнал, пропорциональный ускорению объекта в рабочем направлении и используемый в качестве сигнала обратной связи.
Устройство для реапизапии предлагаемого способа работает следующим образоМо
Генератор 1 вырабатывает электрические колебания, которые через автоматический регулятор 2 уровня и
51
усилитель 3 мощности поступают на катушку подвижной части вибростенда 4. Объектом 8 испытаний является изделие, закрепленное на подвижной части вибростенда 4. В контрольной точке, расположенной рядом с одним из узлов крепления изделия, с помощью вибродатчика 6 осуществляется непрерывный контроль уррвня вибрации. Сигнал, пропорциональный ускорению в рабочем направлении с вибродатчика 6, поступает на согласующий усилитель 7, где осуществляется ум1
ножение сигнала на коэффициент
созЫ
и далее поступает на автоматический регулятор 2 уровня, поддерживающий заданный уровень вибрации.
Формула изобретения
Способ виброиспытаний изделий, заключающийся в том, что вoзб, ждaют колебания испытуемого изделия, в контрольной точке испытуемого издели с помощью однокомпонентного вибродатчика колебания преобразуют в электрический сигнал, по величине которого управляют уровнем сигнала
64886
возбуждения, отличающий- с я тем, что, с целью повышения точности воспроизведения вибрации, рабочую ось вибродатчика ориентируют под углом 0 к рабочей оси вибростенда в одной плоскости с ней, угол 1 определяют по формуле
10
о( arccos
ib -ь h
15
я
20
25
30
где h
- расстояние от плоскости, перпендикулярной рабочей оси вибростенда и проходящей через точку установки вибродатчика, до центра жесткости упругого подвеса подвижной части вибростенда;
b - расстояние от точки установки вибродатчика до рабочей оси вибростенда, сигнал обратной связи ао , по которому регулируют уровень возбуждения колебаний испытуемого изделия, формируют как П(, Д А
эффективное значение сигнала вибродатчика, установленного в контрольной точке о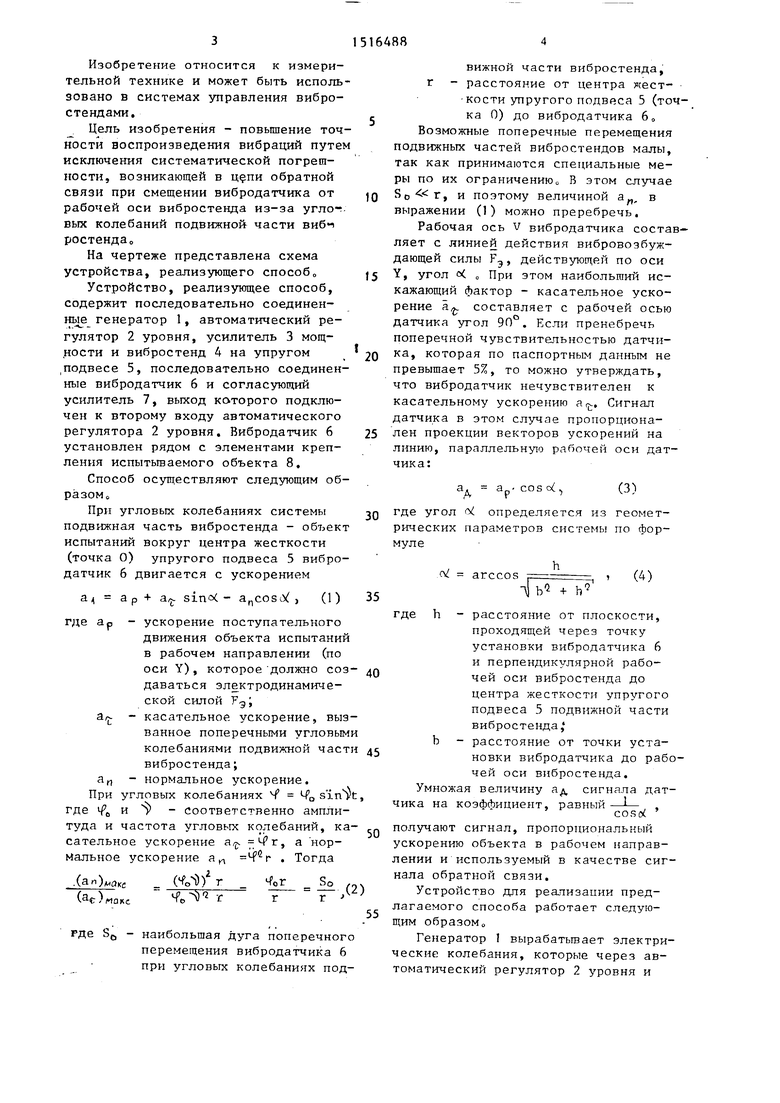
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения ускорений объекта | 1987 |
|
SU1500946A1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ | 2019 |
|
RU2729175C1 |
| Способ виброиспытаний изделий | 1989 |
|
SU1753321A1 |
| СПОСОБ ВИБРОИСПЫТАНИЙ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2729980C1 |
| Способ виброиспытаний изделий и устройство для его осуществления | 1983 |
|
SU1227962A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СПЕКТРАЛЬНЫХ КОЛЕБАТЕЛЬНЫХ ХАРАКТЕРИСТИК КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ РЭС И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536325C2 |
| ДВУХКООРДИНАТНЫЙ ВИБРОСТЕНД | 1993 |
|
RU2116639C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Способ измерения поперечных ускорений объекта | 1984 |
|
SU1347018A1 |
Изобретение относится к измерительной технике и может быть использовано в системах управления вибростендами. Цель изобретения - повышение точности воспроизведения вибраций путем исключения систематической погрешности, возникающей в цепи обратной связи из-за угловых колебаний подвижной части вибростенда. Способ осуществляется следующим образом. Рабочую ось вибродатчика 6, установленного в контрольной точке изделия, ориентируют под углом α к рабочей оси вибростенда. Угол α определяют по формуле α=ARCCOS H/√(B2+H2, где H - расстояние от плоскости, проходящей через точку установки вибродатчика перпендикулярно рабочей оси вибростенда, до центра жесткости упругого подвеса подвижной части вибростенда
B - расстояние от точки установки вибродатчика до рабочей оси вибростенда. Установленный таким образом вибродатчик нечувствителен к угловым колебаниям вибростенда. Сигнал с выхода вибродатчика 6 подается на согласующий усилитель, где осуществляется умножение сигнала на коэффициент 1/COSα, и поступает на автоматический регулятор 2 уровня, поддерживающий заданный уровень вибрации. 1 ил.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
