Настоящее изобретение относится к управлению крутящим моментом тяговой электрической машины в фазе изменения передаточного отношения при торможении в электрической или гибридной архитектуре, не позволяющей обеспечивать соединение с колесом электрического источника регенеративного крутящего момента во время изменений передаточного отношения в чисто электрическом режиме.
Более конкретно, объектом изобретения является способ компенсации прерывания передачи крутящего момента на колесо в случае изменения передаточного отношения при торможении на транспортном средстве, содержащем тяговую электрическую машину, связанную с колесами транспортного средства через коробку передач, которая может передавать на колеса тормозной момент электрической машины в фазе замедления по меньшей мере на двух передаточных отношениях, и механическую систему торможения, действующую на колеса независимо от электрической машины.
Из публикации FR 2 973 299 известна гибридная архитектура, имеющая два чисто электрических передаточных отношения, изменения между которыми происходят при перемещении скользящего зубчатого колеса. После расцепления скользящее зубчатое колесо проходит через промежуточное нейтральное положение, в котором от электрической машины на колесо не передается никакой крутящий момент, после чего оно зацепляется с противоположной стороны.
Этот тип трансмиссии предполагает, что во время фазы торможения, обеспечиваемой электрическим двигателем, при изменении электрического передаточного отношения в режиме ZEV (от Zero Emission Vehicle) наблюдается прерывания передачи крутящего момента на колесо. При этом на колеса больше не передается тормозной момент электрического двигателя. Кроме того, чтобы обеспечить расцепление в первоначальной фазе изменения передаточного отношения, необходимо отключить крутящий момент, создаваемый электрическим двигателем, с целью уменьшения крутящего момента, действующего на уровне кулачковой муфты. Это отключение крутящего момента напрямую влияет на тормозной момент на колесе, что очень плохо ощущается пользователем.
Задачей настоящего изобретения является компенсация отсутствия тормозного момента на колесе как во время фазы отключения крутящего момента при подготовке к расцеплению, так и при изменении передаточного отношения при помощи тормозной системы транспортного средства.
Для этого изобретением предложено определять заданное значение механического тормозного момента на колесах, которое зависит от типа управления электрической машиной и от времени запроса на изменение понижающего передаточного отношения на коробке.
Это изобретение находит свое предпочтительное, но не ограничительное применение на любом транспортном средстве, коробка передач которого не обеспечивает соединения колеса с электрическим источником регенеративного крутящего во время изменения передаточных отношений в электрическом режиме.
Настоящее изобретение будет более понятно из нижеследующего описания не ограничительного варианта его осуществления со ссылками на прилагаемые чертежи, на которых:
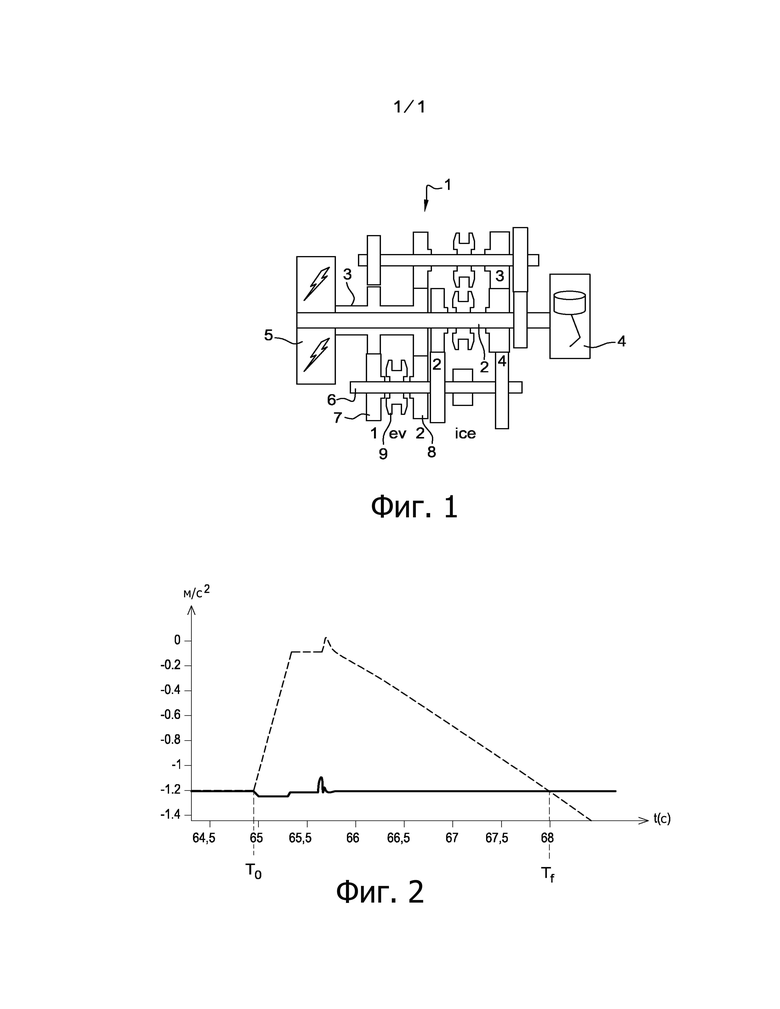
Фиг. 1 - упрощенная схема рассматриваемой коробки передач.
Фиг. 2 иллюстрирует применение изобретения.
На фиг. 1 в упрощенном виде показана архитектура гибридной трансмиссии 1 с четырьмя передаточными отношениями, содержащей два концентричных первичных вала 2, 3, связанных соответственно с двигателем 4 внутреннего сгорания и с тяговой электрической машиной 5. На вторичном валу 6 установлены две шестерни 7, 8 холостого хода, позволяющие устанавливать два первых электрических передаточных отношения в соответствии с положением скользящего зубчатого колеса 9, когда двигатель внутреннего сгорания не соединен с трансмиссией.
Во время изменения передаточного отношения в «чистом» электрическом режиме между передаточными отношениями 1 и 2 передача крутящего момента на колеса прерывается. Это относится к случаю работы в тяговой фазе, а также в фазе «рекуперативного» торможения, когда электрическая машина передает тормозной момент на колесо. Во время изменения между этими двумя передаточным отношениями в фазе «рекуперативного» торможения происходит прерывание тормозного момента, когда скользящее зубчатое колесо 9 проходит через свое промежуточное нейтральное положение. В сам момент запроса на изменение передаточного отношения расцепление не происходит, но его подготовка начинается моментально.
Если рассмотреть систему управления электрической машиной во время этих переходных фаз, то ее основными входными данными являются:
- ME_Tq_sp: заданное значение крутящего момента главной электрической машины в Н.м,
- ME_Tq_esti: оценочное значение крутящего момента, производимого главной электрической машиной, в Н.м,
- DLS_tgt: запрашиваемое передаточное отношение коробки; в момент Т0 запроса на изменение повышающего (или понижающего) передаточного отношения сигнал запрашиваемого передаточного отношения коробки DLS_tgt переходит, например, от значения 2 к значению 1 или от 1 к 2. Момент времени, когда изменение передаточного отношения завершается, обозначается Tf,
- SCM_Ctrl_typ: тип управления коробкой передач: например, отсутствие управления, управление по крутящему моменту или управление по скорости.
Чтобы компенсировать отсутствие тормозного момента электрической машины 5, изобретением предложено передавать в главную тормозную систему транспортного средства заданное значение механического тормозного момента, обозначаемое BRK_Tq_sp. Это заданное значение выражается в Н.м. Это значение, задаваемое главной тормозной системе при помощи предложенного способа, является его выходными данными.
Заданное значение крутящего момента электрической машины 5 (называемой главной, поскольку трансмиссия может также получать энергию от вспомогательных электрических машин) обозначают ME_Tq_sp(t). Заданное значение крутящего момента, относящееся к колесу, ME_Tq_sp_whl, связано с заданным значением крутящего момента электрической машины ME_Tq_sp(t) через передаточное отношение ME_ratio_whl(t) между машиной и колесом в соответствии с уравнением:
ME_Tq_sp_whl(t) = ME_Tq_sp(t) * ME_ratio_whl(t).
Оценочное значение крутящего момента, производимого главной электрической машиной, относящееся к колесу ME_Tq_esti_whl, можно определить аналогично на основании оценки крутящего момента, производимого электрической машиной, как произведение оценочного значения крутящего момента, произведенного электрической машиной, ME_Tq_esti_(t), на это же понижающее передаточное отношение до колес ME_ratio_whl:
ME_Tq_esti_whl(t) = ME_Tq_esti_(t) * ME_ratio_whl(t).
Чтобы учитывать задержку 0 < t_delay <= 1с между передачей заданного значения крутящего момента главной электрической машины, относящееся к колесу, и его реальным применением, определяют задержанное заданное значение крутящего момента, относящееся к колесу ME_Tq_sp_whl_delay, следующим образом: ME_Tq_sp_whl_delay = ME_Tq_sp_whl(t - t_delay) при 0 < t_delay <= 1 секунда. Затем определяют коэффициент задержки α:
α(t) = (ME_Tq_sp_whl(t) - ME_Tq_sp_whl_delay(t)) / t_delay
Благодаря коэффициенту α, можно определить ожидаемое заданное значение крутящего момента главной электрической машины, относящееся к колесу ME_Tq_sp_whl_ant:
ME_Tq_sp_whl_ant = Int(α(T0)),
где Int является дискретным интегралом, инициализированным в момент Т0, с первоначальным условием ME_Tq_sp_whl(Т0). Таким образом, ожидаемое заданное значение крутящего момента электрической машины, относящегося к колесу (ME_Tq_sp_whl_ant) определяют при помощи заданного значения крутящего момента, относящегося к колесу (ME_Tq_sp_whl), на основании коэффициента задержки α, характеризующего отклонение между передачей заданного значения крутящего момента электрической машины, относящегося к колесу, и его реальным применением.
Согласно изобретению, сначала определяют заданное значение механического тормозного момента на колесах в момент времени t: BRK_Tq_sp_raw(t). Это заданное значение является непредельным приближенным заданным значением механического тормозного момента, зависящим от типа управления электрической машиной SCM_Ctrl_typ и от времени Tf конца изменения повышающего или понижающего передаточного отношения на коробке. В зависимости от типа управления BRK_Tq_sp_raw(t) определяют следующим образом.
Если управление отсутствует [SCM_Ctrl_typ(t) = отсутствие управления], непредельное заданное значение механического крутящего момента равно нулю: BRK_Tq_sp_raw(t) = 0.
Если электрической машиной управляют по крутящему моменту [SCM_Ctrl_typ(t) = управление по крутящему моменту] и пока время t предшествует концу повышающего или понижающего перехода [t < Tf], непредельное заданное значение механического тормозного момента BRK_Tq_sp_raw(t) равно разности между ожидаемым временем запроса на крутящий момент на электрическую машину и оценочным значением крутящего момента на колесе при t: BRK_Tq_sp_raw(t) = ME_Tq_sp_whl_ant(t) - ME_Tq_esti_whl(t).
Если электрической машиной управляют по крутящему моменту [SCM_Ctrl_typ(t) = управление по крутящему моменту] и как только время t является более поздним или равным концу повышающего или понижающего перехода (t >= Tf), заданное значение является нулевым (BRK_Tq_sp_raw(t) = 0).
Если электрической машиной управляют по скорости [SCM_Ctrl_typ(t) = управление по скорости] и пока время t предшествует концу повышающего или понижающего перехода [t < Tf], непредельное заданное значение механического тормозного момента равно ожидаемому заданному значению крутящего момента на колесе:
BRK_Tq_sp_raw(t) = ME_Tq_sp_whl_ant(t)
Если электрической машиной управляют по скорости [SCM_Ctrl_typ(t) = управление по скорости] и как только время t является более поздним или равным концу повышающего или понижающего перехода (t >= Tf), непредельное заданное значение механического тормозного момента является нулевым BRK_Tq_sp_raw(t) = 0.
Иначе говоря, заданное значение механического тормозного момента BRK_Tq_sp_raw(t) является нулевым, когда электрической машиной не управляют, перед запросом на повышающий или понижающий переход Т0 или после конца перехода повышающего или понижающего передаточного отношения Тf. Перед концом повышающего или понижающего перехода оно равно:
- разности между ожидаемым запросом крутящего момента на электрическую машину и оценочным значением ожидаемого крутящего момента на колесе BRK_Tq_sp_raw(t) = ME_Tq_sp_whl_ant(t) - ME_Tq_esti_whl(t), если электрической машиной управляют по крутящему моменту, и
- ожидаемому заданному значению крутящего момента, относящемуся к колесу ME_Tq_esti_whl_ant(t), если электрической машиной управляют по скорости.
От непредельного заданного значения механического тормозного момента BRK_Tq_sp_raw(t) к заданному значению механического тормозного момента BRK_Tq_sp(t) переходят при помощи следующих отношений:
- если BRK_Tq_sp_raw(t) > 0, то BRK_Tq_sp (t) = 0
- если BRK_Tq_sp_raw(t) <= 0, то BRK_Tq_sp (t) = BRK_Tq_sp_raw(t).
Если оценочное значение крутящего момента электрической машины ME_Tq_esti в момент времени t отсутствует, изобретение предусматривает использование задержанного заданного значения крутящего момента, относящегося к колесу ME_Tq_sp_whl_delay, для вычисления оценочного значения крутящего момента на колесе ME_Tq_esti_whl. Оно становится:
ME_Tq_esti_whl(t) = ME_Tq_sp_whl_delay(t)
с задержкой, ограниченной, например, значением в 0,05 секунды:
0 < t_delay <= 0,05с.
На фиг. 2 в ходе моделирования показано преимущество предложенного решения, которое компенсирует отсутствие замедления транспортного средства во время изменения передаточного отношения. В этом примере ускорение транспортного средства перед изменением передаточного отношения равно -1,2 м/с2. Без применения изобретения (штриховая кривая) тормозной момент электрической машины уменьшается без компенсации на основании запроса на изменение повышающего или понижающего передаточного отношения в Т0. Одновременно ускорение транспортного средства отходит от своего первоначального значения и повышается до нуля, после чего опять опускается с более пологой крутизной до этого значения. При применении изобретения (сплошная кривая) ускорение транспортного средства сохраняет свое значение -1,2 м/с2 во время изменения передаточного отношения.
Изобретение относится к транспортным средствам. В способе компенсации прерывания крутящего момента на колесе при изменении передаточного отношения при торможении на транспортном средстве определяют заданное значение механического тормозного момента на колесах в зависимости от типа управления электрической машиной и от времени запроса на изменение понижающего передаточного отношения на коробку передач. Если электрической машиной управляют по крутящему моменту, заданное значение механического тормозного момента в момент времени до времени конца перехода на коробке равно разности между ожидаемым запросом крутящего момента на электрическую машину и оценочным значением крутящего момента на колесе. Передают в главную тормозную систему транспортного средства заданное значение механического тормозного момента. Компенсируется отсутствие тормозного момента. 8 з.п. ф-лы, 2 ил.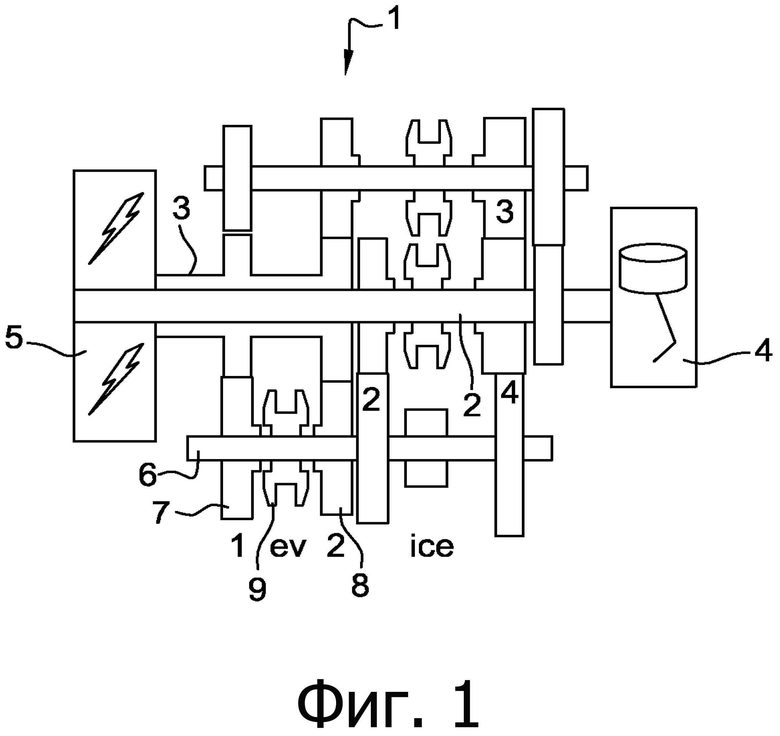
1. Способ компенсации прерывания крутящего момента на колесе при изменении передаточного отношения при торможении на транспортном средстве, содержащем тяговую электрическую машину (5), связанную с колесами транспортного средства через коробку передач (1), которая передает на колеса тормозной момент электрической машины (5) в фазе замедления по меньшей мере на двух передаточных отношениях, и механическую систему торможения, действующую на колеса независимо от электрической машины, отличающийся тем, что определяют заданное значение механического тормозного момента (BRK_Tq_sp_raw(t)) на колесах в зависимости от типа управления электрической машиной и от времени запроса на изменение понижающего передаточного отношения на указанную коробку, при этом, если электрической машиной управляют по крутящему моменту, заданное значение механического тормозного момента в момент времени (t) до времени (Tf) конца перехода на коробке равно разности между ожидаемым запросом крутящего момента ME_Tq_sp_whl_ant(t) на электрическую машину и оценочным значением крутящего момента на колесе ME_Tq_esti_whl(t), и передают в главную тормозную систему транспортного средства заданное значение механического тормозного момента.
2. Способ компенсации прерывания крутящего момента по п. 1, отличающийся тем, что, когда электрической машиной не управляют, заданное значение механического тормозного момента (BRK_Tq_sp_raw(t)) является нулевым.
3. Способ компенсации прерывания крутящего момента по п. 1 или 2, отличающийся тем, что после времени конца изменения понижающего или повышающего передаточного отношения заданное значение механического тормозного момента (BRK_Tq_sp_raw(t)) является нулевым.
4. Способ компенсации прерывания крутящего момента по любому из пп. 1-3, отличающийся тем, что, если электрической машиной управляют по скорости, в момент времени (t) до времени (Tf) конца понижающего или повышающего перехода на коробке заданное значение механического тормозного момента (BRK_Tq_sp_raw(t)) равно ожидаемому заданному значению крутящего момента, относящегося к колесу (ME_Tq_sp_whl_ant(t)).
5. Способ компенсации прерывания крутящего момента по любому из пп. 1-4, отличающийся тем, что оценочное значение крутящего момента электрической машины, относящееся к колесу (ME_Tq_esti_whl(t)), является произведением оценочного значения крутящего момента, произведенного электрической машиной (ME_Tq_esti(t)), на понижающее передаточное отношение до колес (ME_ratio_whl).
6. Способ компенсации прерывания крутящего момента по п. 5, отличающийся тем, что если оценочное значение крутящего момента электрической машины (ME_Tq_esti) в момент времени (t) отсутствует, то оценочное значение крутящего момента на колесе (ME_Tq_esti_whl) основано на задержанном заданном значении крутящего момента, относящегося к колесу (ME_Tq_sp_whl_delay(t)).
7. Способ компенсации прерывания крутящего момента по п. 6, отличающийся тем, что задержка (t_delay) меньше 0,05с.
8. Способ компенсации прерывания крутящего момента по любому из пп. 1-7, отличающийся тем, что заданное значение механического тормозного момента (BRK_Tq_sp_raw(t)) является непредельным приближенным значением.
9. Способ компенсации прерывания крутящего момента по любому из пп. 1-8, отличающийся тем, что заданное значение механического тормозного момента (BRK_Tq_sp(t)) связано с непредельным заданным значением механического тормозного момента (BRK_Tq_sp_raw(t)) посредством следующих соотношений:
- если (BRK_Tq_sp_raw(t)) > 0, то (BRK_Tq_sp (t)) = 0 и,
- если (BRK_Tq_sp_raw(t)) <= 0, то BRK_Tq_sp (t) = BRK_Tq_sp_raw(t).
| WO 2009080901 A1, 02.07.2009 | |||
| US 6126251 A, 03.10.2000 | |||
| WO 2012156043 A1, 22.11.2012 | |||
| RU 2010147456 A, 27.05.2012. |

