Область техники
Настоящее изобретение относится к устройству управления гашением колебаний транспортного средства, такого как автомобиль, и, более конкретно, к устройству для управления гашением колебаний транспортного средства, которое управляет тяговой выходной мощностью (тяговым усилием или тяговым крутящим моментом) транспортного средства для подавления колебаний кузова транспортного средства, а также к устройству, которое оценивает крутящий момент на колесе во время движения автомобиля, преимущественно используемому с указанным устройством.
Уровень техники
Тормозные и тяговые усилия (или сила инерции) и/или другие внешние силы, воздействующие на кузов транспортного средства при ускорении и замедлении транспортного средства, создавая при движении транспортного средства угловые колебания относительно поперечной оси инерции (продольное раскачивание), колебания подпрыгивания и т.п., отражаются на крутящем моменте, действующем между колесом (в частности, приводным колесом во время движения) и поверхностью дороги (далее в настоящем описании именуемом "момент на колесе"). Поэтому в области управления гашением колебаний транспортного средства предлагалось гасить колебания кузова транспортного средства во время его движения путем регулирования момента на колесе, управляя выходной мощностью двигателя или другого тягового устройства транспортного средства (например, см. публикации выложенных заявок на патент Японии №2004-168148 и 2006-69472). При таком управлении гашением колебаний через управления тяговой мощностью колебания продольного раскачивания/колебания подпрыгивания, возникающие в кузове транспортного средства, когда возникает потребность в ускорении или замедлении транспортного средства или когда на кузов транспортного средства действует внешняя сила (возмущение), изменяющая момент на колесе, прогнозируются путем использования модели движения, построенной на основании динамической модели колебаний так называемой подрессоренной массы или подрессоренной массы и неподрессоренной массы кузова транспортного средства, и затем тяговую мощность тягового устройства транспортного средства регулируют так, чтобы погасить спрогнозированное колебание. В случае такого управления гашением колебаний генерирование энергии колебаний подавляется путем регулировки источника силы, генерирующей колебание, а не путем поглощения сгенерированной энергии колебаний, как это происходит в управлении гашением колебаний в подвеске, и поэтому преимущественно достигаются эффект относительно быстрого гашения колебаний и хорошая энергетическая эффективность. Далее, при управлении гашением колебаний через управление тяговой мощностью объект управления сосредоточен в тяговой мощности (тяговом крутящем моменте) движущегося транспортного средства, и поэтому регулировки при управляющем воздействии осуществляются относительно легко.
В таком устройстве управления гашением колебания (или устройстве управления тяговым усилием), осуществляющем управление гашением колебаний путем управления тяговым усилием, как описано выше, в качестве входного параметра обратной связи для подавления возмущающих воздействий на систему управления должен использоваться момент, фактически генерируемый на приводном колесе. Однако по существу на обычном транспортном средстве не устанавливают датчик, который может непосредственно определять величину крутящего момента на колесе при движении транспортного средства, например датчик крутящего момента колеса, измеритель шести составляющих силы на колесе и пр., кроме как для испытания (см. JP 2005-69897), что объясняется проблемами с конструкцией или с себестоимостью транспортных средств. Поэтому в описанном выше устройстве управления гашением колебаний в качестве возмущающего входа в контуре обратной связи используют оценочную величину крутящего момента, при этом оценка основана на частоте вращения колеса, частоте вращения выходного вала тягового устройства транспортного средства и/или на других легко определяемых параметрах. Такая оценочная величина крутящего момента на колесе, полученная на основе частоты вращения колеса и т.п., отслеживается различными управляющими устройствами, такими как ТС (система управления тяговым усилием), ABS (антиблокировочная тормозная система), VSC (система управления стабильностью транспортного средства), VDIM (интегрированная система управления динамикой транспортного средства) для слежения за силой реакции дорожного покрытия на колесо или для проверки поведения транспортного средства в движении (например, см. JP Н11-37872).
Краткое описание изобретения
В описанном выше устройстве управления гашением колебаний или также в различных других устройствах транспортного средства управляющих движением или силой тяги-торможения, когда крутящий момент на колесе определяется не непосредственно, а через оценку с использованием таких параметров, как частота вращения колеса, точность оценки может снижаться в зависимости от эксплуатационных условий колеса или шины, и поэтому управление транспортным средством может ухудшиться. Например, когда крутящий момент на колесе определяется на основании измеренной величины частоты вращения колеса, точность оценки может снизиться, если колесо (ведущее колесо во время движения транспортного средства) начинает проскальзывать. Более того, хотя большинство датчиков скорости колеса, применяемых в обычных автомобилях, определяют частоту вращения колеса, направление его вращения (то есть вращается ли колесо вперед или назад относительно направления движения транспортного средства) определить невозможно, и поэтому в расчетах, проводимых системой управления, используется крутящий момент на колесе, который должен оцениваться с учетом направления его вращения. Особенно в случае управления колебаниями продольного раскачивания или колебаниями подпрыгивания через управление тяговым усилием, как описано выше, когда величина и/или направление оценочного крутящего момента на колесе отличаются от реально существующих на колесе, невозможно достичь хорошего эффекта гашения колебаний, и даже наоборот, колебания можно усилить. Однако в обычном устройстве управления гашением колебаний или силы тяги-торможения при движении транспортного средства, в котором в качестве параметра используется оценочная величина крутящего момента на колесе, редко учитывают состояние, когда не выполняется правильная оценка крутящего момента на колесе.
Поэтому одной из главных целей настоящего изобретения является создание устройства для оценки крутящего момента на колесе, работающего в устройстве для управления гашением колебаний, описанном выше, в котором в случае невозможности применения хорошей оценки крутящего момента на колесе, учитывая это, устройство генерирует оценочную величину крутящего момента на колесе.
Далее другой целью настоящего изобретения является создание устройства, которое управляет тяговым крутящим моментом транспортного средство для управления гашением колебаний во время движения транспортного средства, на основе оценочной величины крутящего момента на колесе, полученной описанным выше устройством оценки крутящего момента на колесе.
Согласно настоящему изобретению, в коротком изложении, предлагаются устройство для оценки крутящего момента на колесе, выполненное с возможностью соответствующей корректировки оценочной величины крутящего момента на колесе, когда значение или направление оценочной величины крутящего момента на колесе по разным причинам отклоняется от реально действующих на колесо при управлении гашением колебаний и/или при управлении другими движущими, перемещающими или тяговыми/тормозными силами транспортного средства с использованием оценочной величины крутящего момента на колесе без использования датчика крутящего момента и пр., для измерения крутящего момента на колесе, и устройство управления гашением колебаний транспортного средства, использующее такое скорректированное оценочное значение крутящего момента на колесе.
Согласно одному аспекту устройство по настоящему изобретению для оценки крутящего момента, возникающего между колесом транспортного средства и поверхностью дороги, характеризуется тем, что содержит узел оценки крутящего момента, который оценивает оценочное значение крутящего момента на колесе, генерируемого в пятне контакта колеса с поверхностью дороги; узел количественного расчета состояния проскальзывания, который рассчитывает количественный показатель состояния проскальзывания колеса, который указывает на состояние проскальзывания колеса; и узел коррекции крутящего момента на колесе, который корректирует оценочную величину крутящего момента на колесе так, что абсолютная величина оценки крутящего момента на колесе уменьшается, когда степень проскальзывания, на которую указывает количественный показатель состояния проскальзывания, увеличивается. "Состояние или условие проскальзывания колеса" означает состояние, при котором сила, которую колесо прилагает к поверхности дороги, превышает предел проскальзывания (максимальный круг трения) колеса (или шины) при движении транспортного средства, в результате чего колесо "проскальзывает" по поверхности дороги, а "степень проскальзывания" соответствует величине силы трения между поверхностью колеса и поверхностью дороги в состоянии проскальзывания (когда возникает относительное проскальзывание между поверхностью колеса и поверхностью дороги, проскальзывание между поверхностью колеса и поверхностью дороги увеличивается с уменьшением силы трения). Оценочная величина крутящего момента на колесе, хотя и зависит от способа оценки, обычно рассчитывается исходя из предположения, что колесо находится в сцеплении с поверхностью дороги. Однако, если колесо переходит в состояние проскальзывания, это предположение становится неверным и точность оценочной величины крутящего момента снижается. Поэтому в устройстве для оценки крутящего момента на колесе по настоящему изобретению рассчитывается "количественный показатель состояния проскальзывания колеса", который указывает на состояние проскальзывания колеса, и, по мере того, как степень проскальзывания, на которую указывает количественный показатель состояния проскальзывания колеса, увеличивается, оценочная величина крутящего момента на колесе корректируется так, что ее абсолютное значение становится меньше. Оценочная величина крутящего момента на колесе оценивается исходя из предположения, что колесо находится в сцеплении с поверхностью дороги, но если колесо проскальзывает, сила или крутящий момент, передаваемый от поверхности дороги на колесо, уменьшается. Поэтому, когда колесо находится в таком состоянии проскальзывания, оценочная величина крутящего момента корректируется в сторону уменьшения и тем самым ожидается, что оценочная величина крутящего момента приближается к фактической величине.
Следует понимать, что в качестве "количественного параметра состояния проскальзывания колеса", указывающего на состояние проскальзывания колеса, можно использовать произвольную величину, если ее можно использовать как заданное значение, позволяющее определить переход от состояния сцепления к состоянию проскальзывания колеса. Например, в качестве количественного параметра состояния проскальзывания колеса можно использовать коэффициент скольжения колеса или коэффициент пробуксовывания (хотя в этих терминах используется слово "проскальзывание", в данном случае независимо от того, находится ли шина в сцеплении с дорогой или нет, "проскальзывание" означает разницу между скоростью транспортного средства и частотой вращения колеса (величиной, полученной умножением частоты вращения колеса на радиус колеса) и, следовательно, значение слова "проскальзывание" отличается от случая, когда колесо скользит по поверхности дороги, как в вышеупомянутом "состоянии проскальзывания"), но предпочтительно, например, во время движения транспортного средства в качестве количественного параметра состояния проскальзывания колеса использовать отношение частоты вращения ведущего колеса к частоте вращения ведомого (холостого) колеса транспортного средства (при ускорении транспортного средства, независимо от того, находится ли ведущее колесо в состоянии проскальзывания или нет, частота вращения ведомого колеса является величиной, соответствующей скорости транспортного средства, но частота вращения ведущего колеса, перешедшего в состояние проскальзывания, больше не соответствует скорости транспортного средства).
В вышеописанном устройстве для оценки крутящего момента на колесе, хотя такая оценочная величина может рассчитываться произвольными процессами, типично, как поясняется ниже, в описании варианта настоящего изобретения, оценку можно проводить на основе частоты вращения колеса (или круговой скорости колеса), определенной датчиком частоты вращения колеса транспортного средства. В этом случае при движении транспортного средства оценочная величина крутящего момента на колесе может рассчитываться как функция дифференциального значения частоты вращений ведущего колеса.
Согласно другому аспекту настоящего изобретения устройство содержит узел оценки крутящего момента, который оценивает величину крутящего момента на колесе на основе частоты вращения колеса, определенной датчиком частоты вращения колеса; и узел коррекции крутящего момента на колесе, который корректирует оценочную величину крутящего момента на колесе во время заднего хода транспортного средства. Как было кратко упомянуто выше, при расчете оценочной величины крутящего момента на колесе на основе частоты вращения колеса, определяемой датчиком частоты вращения колеса, большинство датчиков частоты вращения колеса, устанавливаемых на обычных автомобилях массового производства, кроме некоторых датчиков высокого класса, не могут определить направление вращения колеса. Поэтому в системе управления, где на одном из входов используется частота вращения колеса, если используется оценочная величина крутящего момента на колеса, полученная непосредственно от датчика частоты вращения колеса, может случиться так, что вход будет использован в противоположном направлении, когда колесо вращается (катится) назад при движении транспортного средства задним ходом и т.п. Тогда согласно одному из вариантов коррекции оценочной величины крутящего момента на колесе по настоящему изобретению, когда колесо вращается назад, как описано выше (движение задним ходом или вращение колеса назад можно определить по положению рычага переключения передач коробки передач транспортного средства), оценочную величину крутящего момента на колесе корректируют и придают ей отрицательное значение (сохраняя при этом ее абсолютное значение). В этом отношении следует понимать, что предпочтительно коррекция оценочной величины крутящего момента на колесе в область отрицательных значений может выполняться вместе с коррекцией на основе количественного показателя состояния проскальзывания колеса.
В настоящем изобретении оценочная величина крутящего момента на колесе, которая корректируется на основании количественного показателя состояния проскальзывания колеса и/или при движении транспортного средства задним ходом, как описано выше, преимущественно используется в устройстве управления гашением колебаний транспортного средства, которое гасит колебания продольного раскачивания или колебания подпрыгивания транспортного средства, управляя тяговым крутящим моментом транспортного средства. Таким образом, согласно одному аспекту настоящего изобретения устройство управление гашением колебаний транспортного средства содержит узел расчета оценочной величины крутящего момента на колесе, который получает оценочную величину крутящего момента на колесе, генерируемого на пятне контакта колеса транспортного средства с поверхностью дороги и воздействующего на колесо; и узел управления тяговым крутящим моментом, который управляет тяговым крутящим моментом транспортного средства для подавления амплитуд колебаний продольного раскачивания и колебаний подпрыгивания на основе оценочной величины крутящего момента на колесе, при этом имеется узел расчета количественного параметра состояния проскальзывания, который определяет количественный параметр состояния проскальзывания колеса, указывающий на состояние проскальзывания колеса; причем абсолютное значение оценочной величины крутящего момента на колесе или управляемая переменная тягового крутящего момента корректируется в сторону уменьшения, по мере того как степень проскальзывания, выраженная количественным параметром состояния проскальзывания колеса, увеличивается; и тяговый крутящий момент транспортного средства регулируется с учетом скорректированной оценочной величины крутящего момента на колесе. Далее, согласно альтернативному аспекту, в таком устройстве управления гашением колебаний транспортного средства, имеющем узел расчета оценочной величины крутящего момента на колесе и узел управления тяговым крутящим моментом, как описано выше, если крутящий момент на колесе оценивается на основе частоты вращения колеса, определенной датчиком частоты вращения колеса, то оценочная величина крутящего момента на колесе, рассчитанная узлом расчета оценочной величины крутящего момента на колесе, может быть скорректирована в область отрицательных значений во время движения транспортного средства задним ходом и регулирование тягового крутящего момента может осуществляться с учетом скорректированной оценочной величины крутящего момента на колесе. Для этого вышеупомянутое устройство управления гашением колебаний транспортного средства может использовать оценочную величину крутящего момента на колесе, генерируемую другим устройством, а не устройством управления гашением колебаний, и, кроме того, устройство для оценки крутящего момента или средство генерирования оценочной величины крутящего момента на колесе могут быть расположены внутри устройства управления гашением вибраций, и генерируемая ими оценочная величина может корректироваться.
Как более подробно будет описано ниже, например, вышеупомянутое устройство управления гашением колебания транспортного средства, которое подавляет колебания продольного раскачивания или колебания подпрыгивания, может быть устройством, которое регулирует крутящий момент на колесе, т.е. тяговый крутящий момент транспортного средства, так, чтобы уменьшить амплитуду колебаний подпружиненной массы и/или неподпружиненной массы кузова транспортного средства при движении транспортного средства, в то время как крутящий момент на колесе рассматривается как внешняя сила, возбуждающая колебания продольного раскачивания или колебания подпрыгивания кузова транспортного средства. Оценочная величина крутящего момента на колесе вводится как сигнал обратной связи или как помеха в эту систему управления гашением колебаний, в которой оценочная величина крутящего момента на колесе корректируется так же, как и в вышеописанном устройстве для оценки крутящего момента на колесе, когда колесо находится в состоянии проскальзывания или вращается назад. Как будет понятно из описания вышеупомянутого устройства для оценки крутящего момента на колесе, с помощью коррекции оценочной величины крутящего момента на колесе, когда колесо находится в состоянии проскальзывания или вращается назад ожидаемо, оценочная величина крутящего момента на колесе, используемая в устройстве управления гашение колебаний, становится ближе к фактической величине крутящего момент на колесе по величине и/или направлению, и поэтому, даже когда невозможно провести хорошую оценку крутящего момента на колесе, ожидается, что будет проведено эффективное управление гашением колебаний. В этой связи следует понимать, что техническая концепция коррекции оценочной величины крутящего момента на колесе по настоящему изобретению может быть применена в устройствах управления гашением колебаний, которые используют оценочную величину крутящего момента на колесе не только от вышеупомянутого устройства управления гашение колебаний, и такие случаи входят в объем настоящего изобретения.
В устройстве управления гашением колебаний путем управления тяговым крутящим моментом транспортного средства в вышеописанном аспекте настоящего изобретения в случае, когда величина крутящего момента на колесе оценивается на основе частоты вращения колеса, определенной датчиком частоты вращения колеса, расположенным на ведущем колесе транспортного средства, то, если такой датчик работает неправильно, оценочную величину крутящего момента на колесе можно скорректировать и производить оценку на основе частоты вращения выходного вала тягового устройства транспортного средства. Теоретически частота вращения колеса и частота вращения входного вала тягового устройства транспортного средства коррелируют друг с другом (если частота вращения колеса меняется под воздействием каких-либо факторов, "частота вращения" выходного вала тягового устройства должна измениться), и поэтому при возникновении неисправности датчика частоты вращения колеса и частоту вращения колеса невозможно определить с достаточной точностью, оценочную величину крутящего момента на колесе рассчитывают на основе частоты вращения выходного вала тягового устройства транспортного средства, и тем самым управление гашением колебаний можно осуществлять также и при неисправном датчике частоты вращения колеса.
Далее, в вышеупомянутом устройстве управления гашением колебаний, когда определяется, что невозможно осуществлять хорошее управление гашением колебаний, даже при корректировании оценочной величины крутящего момента на колесе, управление тяговым крутящим моментом на основе оценочной величины крутящего момента на колесе может быть приостановлено. Более того, эффекты управления гашением колебаний предназначены для эксплуатационной стабильности транспортного средства и повышения комфорта поездки, и поэтому, если будет определено, что нет необходимости осуществлять управление гашением колебаний, когда колесо находится в состоянии проскальзывания, при движении транспортного средства задним ходом и/или при отказе датчика частоты вращения колеса, управление тяговым крутящим моментом на основе оценочной величины крутящего момента на колесе может быть приостановлено. В частности, устройство может быть адаптировано к остановке управления тяговым крутящим моментом на основе оценочной величины крутящего момента на колесе, когда колесо находится в состоянии проскальзывания и степень проскальзывания, на которую указывает количественный параметр колеса, превышает заданное пороговое значение. В такой конструкции усиление колебаний из-за подачи на вход устройства управления гашением колебаний неправильной величины крутящего момента не происходит.
Кстати, в транспортных средствах, таких как автомобили последних лет выпуска, установлены управляющие устройства, которые управляют тормозной системой автомобиля, например управляющие устройства систем VSC, TRC, VDIM, ABS и пр. (далее именуемые устройства управления торможением). Эти устройства управления торможением рассчитывают "количественный параметр проскальзывания колеса", который указывает на состояние проскальзывания колеса, как описано выше, и на основе рассчитанной величины осуществляют управление в соответствии с соответствующими управляющими процессами так, чтобы уменьшить коэффициент скольжения колеса. Таким образом, устройство управления гашением колебаний по настоящему изобретению может быть адаптировано для использования "количественного параметра проскальзывания колеса", рассчитанного устройством управления торможением, как описано выше, что позволяет повысить эффективность или упростить конструкцию системы управления в одном транспортном средстве (избегая дублирования измерений или расчетов одной и той же измеряемой величины, управляемой переменной и пр.). Однако в этом случае, если устройство управления торможением не работает по какой-либо определенной причине, информацию о степени проскальзывания колеса невозможно ввести в устройство управления гашением колебаний, и, следовательно, невозможно осуществлять должным образом управление гашением колебаний на основании оценочной величины крутящего момента на колесе. Как уже было описано, когда колесо находится в состоянии проскальзывания, оценочная величина крутящего момента на колесе, основанная на частоте вращения колеса, становится большей, чем величина крутящего момента, реально генерируемого на колесе. Поэтому, если управление тяговым крутящим моментом осуществляется на основе такой оценочной величины крутящего момента на колесе в состоянии, когда состояние проскальзывания невозможно определить, в то время как колесо действительно находится в состоянии проскальзывания, не только может снизиться эффект гашения колебаний, но могут возникнуть колебания продольного раскачивания транспортного средства, вызванные чрезмерным изменением тягового крутящего момента. Такое состояние противоречит цели настоящего изобретения, которую преследует система управления гашением колебаний и которая заключается в повышении эксплуатационной стабильности и комфорта поездки на транспортном средстве.
Таким образом, согласно другому аспекту настоящего изобретения устройство управления гашением колебаний, относящееся к типу, в котором осуществляется управление гашением колебаний, в котором колебания продольного раскачивания или колебания подпрыгивания кузова транспортного средства подавляются через управление тяговым крутящим моментом транспортного средства, содержит узел расчета оценочной величины крутящего момента на колесе, который рассчитывает оценочную величину крутящего момента, генерируемого на пятне контакта колеса с поверхностью дороги и который воздействует на колесо; узел управления тяговым крутящим моментом, который управляет тяговым крутящим моментом транспортного средства для подавления амплитуды колебаний продольного раскачивания или колебаний подпрыгивания на основе оценочной величины крутящего момента на колесе; и, далее, узел приема количественного параметра состояния проскальзывания, который принимает количественный параметр состояния проскальзывания колеса, являющийся индикатором состояния проскальзывания колеса, от устройства управления торможением транспортного средства для уменьшения проскальзывания колеса, в котором управляемая переменная тягового крутящего момента может корректироваться на основе степени проскальзывания, на которую указывает количественный параметр проскальзывания колеса, и управляемая переменная тягового крутящего момента может быть уменьшена, когда устройство управления торможением не может работать, по сравнению со случаем, когда устройство управления торможением может работать.
В вышеуказанной конструкции в устройстве управления гашением колебаний, которое принимает количественный параметр проскальзывания колеса, указывающий на состояние проскальзывания колеса, от устройства управления торможением транспортного средства, когда устройство управления торможением не может работать или когда его срабатывание запрещено, а именно когда мониторинг состояния проскальзывания невозможен, управляемую переменную тягового крутящего момента уменьшают по сравнению с ситуацией, когда устройство управления торможением может работать, и, следовательно, возникновение неблагоприятных ситуаций из-за устройства управления гашением колебаний, когда колесо переходит в состояние проскальзывания, предотвращается.
Кроме того, согласно другому вышеупомянутому аспекту, особенно в случае, когда управляемая переменная тягового крутящего момента, создаваемая узлом управления тяговым крутящим моментом, определяется на основе оценочной величины крутящего момента на колесе и величины тяги, запрошенной водителем транспортного средства (например, на основе степени нажатия педали акселератора), если устройство управления торможением не может работать, управляемую переменную тягового крутящего момента, основанную на оценочной величине крутящего момента на колесе, можно уменьшить по существу до 0. Тем самым, в случае невозможности определения состояния колеса и невозможности достаточно точного расчета оценочной величины крутящего момента на колесе, управление гашением колебаний в противодействие возмущениям по существу останавливается и предотвращается возникновение любых неблагоприятных условий, вызванных срабатыванием устройства управления гашением колебаний. С другой стороны, что касается управления гашением колебаний на основе запроса величины тяги от водителя транспортного средства (соответствующего «упреждающему управлению» в следующем варианте), поскольку управляемая переменная не зависит от точности оценочной величины крутящего момента на колесе, то такой способ управления может осуществляться. Однако, когда шина колеса находится в состоянии проскальзывания, хорошее управление передачей тягового крутящего момента на колесо осуществляться не может, поэтому можно уменьшить управляемую переменную или приостановить осуществление управления.
В вышеописанной конструкции устройство управления торможением может быть выбрано из группы, включающей ABS, VSC и TRC, селективно переведенной в рабочее положение водителем транспортного средства. Когда соответствующее выбору водителя устройство управления торможением не переводится в рабочее состояние, управляемую переменную тягового крутящего момента можно уменьшить по сравнению с ситуацией, когда устройство управления торможением работает. Более того, в случае, когда транспортное средство оснащено так называемой VDIM (интегрированная система управления динамикой транспортного средства), т.е. устройством, включающим ABS, VCS и TRC, рулевое управление, и интегрально управляющим стабильностью поведения транспортного средства, устройство управления торможением может быть частью VDIM и управляемая переменная тягового крутящего момента может уменьшаться, когда VDIM не работает по выбору водителя. В этих случаях при уменьшении управляемой тягового крутящего момента управление гашением колебаний на основе оценочной величины крутящего момента на колесе может быть по существу остановлено.
Кроме того, также согласно вышеупомянутому аспекту, когда устройство управления торможением не работает из-за неисправности в тормозном устройстве, возникает состояние, когда колесо невозможно обнаружить, поэтому управляемую переменную тягового крутящего момента можно уменьшить по сравнению со случаем, когда устройство управления торможением работает. В этом случае также при уменьшении управляемой переменной тягового крутящего момента управление гашением колебаний на основе оценочной величины крутящего момента на колесе может быть по существу остановлено.
По существу, согласно настоящему изобретению, даже в случае невозможности получения хорошей оценки крутящего момента на колесе можно получить оценочную величину крутящего момента на колесе, близкую к реальной, поэтому ожидается, что управление гашением колебаний транспортного средства будет осуществляться лучше, чем когда-либо ранее. Далее, под преимуществом настоящего изобретения следует понимать тот факт, что ранее для определения величины крутящего момента на колесе, даже когда колесо находится в состоянии скольжения или вращается назад, требовалось какое-либо устройство, установленное на колесе, например датчик крутящего момента, но согласно настоящему изобретению можно получить величину крутящего момента на колесе, используемую для управления движением, тормозным усилием или гашением колебаний транспортного средства и без такого датчика. Поскольку нет необходимости устанавливать датчик крутящего момента для определения крутящего момента на колесе, стоимость транспортного средства или управляющего устройства и/или трудозатраты на их проектирование можно уменьшить.
Кроме того, что касается одного из вышеупомянутых аспектов настоящего изобретения, если устройство управления гашением колебаний по настоящему изобретению адаптировано для использования количественного параметра состояния проскальзывания колеса, рассчитанного устройством управления торможением, то, когда устройство управления торможением не работает, управляющая переменная тягового крутящего момента уменьшается по сравнению со случаем, когда устройство управления торможением работает. В соответствии с такой конструкцией предотвращается возникновение неблагоприятных ситуаций, являющихся результатом работы устройства управления гашением колебаний по настоящему изобретению в условиях, когда устройство управления торможением не работает. В частности, на автомобилях последних лет выпуска для осуществления управления множеством параметров стали доступны интегрированные системы управления движением, такие как VDIM, и поэтому требуется упрощение конструкции и повышение эффективности для уменьшения себестоимости и трудозатрат при изготовлении, а также для уменьшения сложностей при использовании транспортного средства. Можно сказать, что в случае такого множества управляющих конструкций, установленных на одном транспортном средстве, конструкция по настоящему изобретению предотвращает возникновение неожиданных, неправильных операций устройства управления гашением колебаний.
Другие цели и преимущества настоящего изобретения будут очевидны из нижеследующего подробного описания предпочтительных вариантов настоящего изобретения.
Краткое описание чертежей
Фиг.1(А) - схематическая диаграмма автомобиля, в котором реализован предпочтительный вариант устройства управления гашением колебаний по настоящему изобретению. Фиг.1(В) - более подробная схематическая диаграмма внутренней структуры электронного управляющего устройства по фиг.1(А).
Фиг.2(А) - чертеж, поясняющий переменные состояния колебаний кузова транспортного средства, которые должны подавляться в устройстве управления гашением колебаний по одному предпочтительному варианту настоящего изобретения. Фиг.2(В) - чертеж, иллюстрирующий структуру управления гашением колебаний в предпочтительном варианте настоящего изобретения в форме блок-схемы.
Фиг.3 - чертежи, поясняющие динамические модели движения колебаний кузова транспортного средства, применяемые в устройстве гашения колебаний в предпочтительном варианте изобретения. На фиг.3(А) показана модель колебаний подпружиненной массы, а на фиг.3(В) показана модель колебаний подпружиненной массы и неподпружиненной массы.
Фиг.4 - граф корректирующего коэффициента kslip для оценочной величины крутящего момента на колесе, который меняется в зависимости от количественного параметра состояния проскальзывания колеса.
Фиг.5 - чертеж, иллюстрирующий структуру устройства оценки крутящего момента на колесе в форме диаграммы управляющей последовательности. Конструкции С6а - С6е могут быть выполнены отдельно от устройства управления тягой или устройства управления торможением.
Подробное описание предпочтительных вариантов
Далее следует подробное описание нескольких предпочтительных вариантов настоящего изобретения со ссылками на приложенные чертежи. На разных чертежах одинаковыми позициями обозначены одинаковые детали.
Конструкция устройства
На фиг.1 схематически показано транспортное средство, например автомобиль, в котором установлен предпочтительный вариант устройства управления гашением колебаний по настоящему изобретению. На этом чертеже показано транспортное средство 10, имеющее левое и правое передние колеса 12FL и 12FR и левое и правое задние колеса 12RL и 12RR, тяговое устройство 20, которое генерирует тяговое усилие или тяговый крутящий момент, на задних колесах в соответствии с нажатием водителем педали 14 акселератора известным способом. В показанном примере тяговое устройство 20 выполнено так, что тяговый крутящий момент или вращающее тяговое усилие передается от двигателя 22 внутреннего сгорания через преобразователь 24 крутящего момента, автоматическую трансмиссию 26, дифференциал 28 и т.д. на задние колеса 12RL и 12RR. Однако вместо двигателя 22 внутреннего сгорания тяговое устройство может быть электрическим, использующим электродвигатель, или гибридным, имеющим и двигатель внутреннего сгорания, и электродвигатель. Далее, транспортное средство может быть полноприводным или переднеприводным транспортным средством. В этой связи, хотя для упрощения это и не показано на чертеже, транспортное средство оснащено устройством торможения, которое генерирует тормозное усилие на каждом колесе, и устройством рулевого управления для управления углом поворота передних колес или передних и задних колес, как в нормальном транспортном средстве.
Работой тягового устройства 20 управляет электронное управляющее устройство 50. Электронное управляющее устройство 50 может включать микрокомпьютер нормального типа и приводные цепи, имеющие центральный процессор, ПЗУ и ОЗУ, а также устройства портов ввода/вывода, взаимно соединенные с двунаправленной общей шиной. В электронное управляющее устройство 50 вводятся сигналы, указывающие на скорость Vwi колес (i=FL, FR, RL, RR) от датчиков 30i частоты вращения колеса (i=FL, FR, RL, RR), установленных на соответствующих колесах; сигналы от датчиков, установленных на разных частях транспортного средства, например сигнал ne частоты вращения двигателя, сигнал no частоты вращения трансмиссии, сигнал θа величины нажатия педали акселератора и пр. В этом отношении следует отметить, что в дополнение к вышеуказанным можно вводить различные детектированные сигналы для определения различных параметров, необходимых для управления разными функциями транспортного средства по этому варианту. Электронное управляющее устройство 50 может содержать устройство 50а управления тягой, которое управляет работой тягового устройства 20, и устройство 50b управления торможением, которое управляет работой тормозным устройством (не показано), как более подробно схематически показано на фиг.1(В).
Устройство 50b управления торможением может быть устройством, осуществляющим алгоритм управления торможением, хорошо известный специалистам, такой как ABS, VSC и TRC, то есть который препятствует превышению силой трения между колесом и поверхностью дороги (т.е. сумме векторов продольной силы и боковой силы на колесе) определенного предельного значения и/или управляет продольной силой или коэффициентом скольжения на колесе для предотвращения ухудшения поведения транспортного средства, вызванного превышением предела силой трения колеса. Либо устройство управления торможением может быть частью VDIM, которая управляет рулевым управлением и пр., а также коэффициентом скольжения колеса через систему ABS, VSC и TRC для стабилизации поведения транспортного средства. На вход такого устройства управления торможением, как показано на чертежах, подают электрические сигналы в форме импульсов, генерируемых последовательно при каждом повороте соответствующего колеса на заранее определенный угол, датчиками 30FR, FL, RR, RL частоты вращения колеса на каждом соответствующем колесе; причем частота вращения каждого колеса рассчитывается путем измерения временных интервалов между приходом последовательно вводимых импульсов; и величина r∙ω частоты вращения колеса рассчитывается путем умножении скорости вращения колеса на радиус соответствующего колеса. Более того, как более подробно будет описано ниже, для расчета оценочной величины крутящего момента на колесе в устройстве 50b управления торможением может выполняться оценка, находится ли шина колеса в состоянии проскальзывания или нет, и рассчитываться «количественный параметр состояния проскальзывания колеса», справочная величина, указывающая на степень проскальзывания, когда колесо находится в состоянии проскальзывания. Величина r·ω частоты вращения колеса и количественный параметр состояния проскальзывания колеса передаются на устройство 50а управления тягой для расчета оценочной величины крутящего момента на колесе. В этой связи устройство 50а управления тягой может осуществлять пересчет частоты вращения колеса в скорость вращения колеса. В этом случае частоту вращения колеса на устройство 50а управления тягой подает устройство 50b управления торможением.
Управление торможением, такое как ABS, VCS, TRC или управления с помощью VDIM, как описано выше, включается селективно, выключателем 52 (который может быть установлен для каждой примененной системы управления, хотя на чертежах для простоты показан только один), установленным в положении, доступном для водителя транспортного средства (например, в произвольном положении на передней панели сиденья водителя). Таким образом, в соответствии с намерениями водителя эти системы управления торможением работают только, когда выключатель 52 находится в положении ВКЛ, и не работают, когда выключатель 52 находится в положении ВЫКЛ. Далее, хотя это и не показано, если тормозное устройство работает не штатно, способами, известными специалистам, определяется, что управление торможением становится невозможным, и в этом случае на работу вышеупомянутого устройства управления торможением налагается запрет. Затем, когда работа устройства управления торможением запрещена, расчет количественного параметра состояния скольжения колеса также не производится. Таким образом, в описанном ниже случае управление гашением колебаний на основе оценочной величины крутящего момента на колесе устройством управления гашением колебаний может быть остановлено. Для этого от устройства 50b управления торможением на устройство 50а управления тягой могут передаваться сигналы, указывающие,работают ли различные системы, такие как VSC, ABS или TRC, управляющие коэффициентом скольжения колеса или нет, а также величина частоты вращения колеса и количественный параметр состояния проскальзывания колеса.
Кроме того, как поясняется ниже, устройство по настоящему изобретению может быть адаптировано так, чтобы осуществление коррекции оценочной величины крутящего момента на колесе на основе степени проскальзывания колеса разрешалось, только когда реально осуществляется управление системами VSC, ABS или TRC. В этом случае от устройства 50b управления торможением на устройство 50а управления тягой передается информация, указывающая на наличие или отсутствие соответствующих видов управления, таких как VSC, ABS или TRC, управляющих коэффициентом скольжения колеса, а также вышеупомянутая последовательность сигналов. Кроме того, если в датчиках частоты вращения колес возникнет любая неисправность, так что данные о частоте вращения колеса получены быть не могут, необходимо изменить способ получения оценочной величины крутящего момента на колесе, и поэтому от устройства 50b управления торможением на устройство 50а управления тягой может передаваться информация о неэффективном статусе данных о частоте вращения колеса, которая указывает на то, что данные о частоте вращения колеса не могут быть получены.
В устройстве 50а управления тягой заданный выходной крутящий момент (запрошенный тяговый крутящий момент) для тягового устройства, запрошенный водителем, определяется по степени нажатия педали θа акселератора. Однако в устройстве управления тягой по настоящему изобретению запрошенный тяговый крутящий момент корректируется для осуществления управления подавлением (гашением) колебаний продольного раскачивания/колебаний подпрыгивания кузова транспортного средства через управление тяговым крутящим моментом, и управляющее задание, соответствующее скорректированному таким образом запрошенному крутящему моменту, выдается на тяговое устройство 20. При таком управлении гашением колебаний продольного раскачивания/колебаний подпрыгивания выполняется (1) расчет оценочной величины крутящего момента на ведущем колесе (колесах), создаваемый силой, действующей на ведущее колесо от поверхности дороги; (2) расчет количественного параметра состояний колебаний продольного раскачивания/колебаний подпрыгивания с помощью модели колебаний кузова транспортного средства; и (3) расчет величины коррекции крутящего момента на колесе для колебаний продольного раскачивания/колебаний подпрыгивания и на этой основе величины коррекции запрошенного крутящего момента. Оценочная величина крутящего момента на колесе в шаге (1) может рассчитываться на основе величины частоты вращения ведущего колеса (или скорости вращения ведущего колеса), полученной от устройства 50b управления торможением, или на основе величины ne частоты вращения двигателя. В этой связи следует понимать, что устройство управления гашением колебаний по настоящему изобретению выполняет операции (1)-(3) обработки, а устройство оценки крутящего момента на колесе по настоящему изобретению выполняет операцию (4) обработки.
Конструкция устройства управления тяговым крутящим моментом, осуществляющего управление гашением колебаний продольного раскачивания/колебаний подпрыгивания кузова транспортного средства
В транспортном средстве, когда тяговое устройство работает на основе запросов тяги, поступающих от водителя и при возникновении изменений крутящего момента на колесе, в кузове 10 транспортного средства, как показано на фиг.2(А), могут возникнуть колебания подпрыгивания центроида Cg кузова транспортного средства в перпендикулярном направлении (в направлении оси z) и колебания продольного раскачивания (направление θ) вокруг центроида кузова транспортного средства. Более того, когда на колесо от поверхности дороги при движении транспортного средства действует внешняя сила или момент (возмущение), это возмущение может передаваться на транспортное средство и в кузове транспортного средства могут возникать колебания в направлении подпрыгивания и колебания раскачивания вокруг поперечной оси инерции транспортного средства. Поэтому в описываемом варианте создана модель движения при колебаниях продольного раскачивания и подпрыгивания кузова транспортного средства, где смещения z и θ и степень их изменений dz/dt и dθ/dt в кузове транспортного средства, т.е. рассчитываются переменные состояния колебания кузова транспортного средства в момент времени, когда в модель введены величина крутящего момента на колесе, пересчитанная из запрошенного тягового крутящего момента, и оценочная величина имеющегося крутящего момента на колесе; а затем тяговый крутящий момент тягового устройства регулируют (корректируют запрошенный тяговый крутящий момент) так, чтобы переменные состояния, полученные из модели, сходили на 0, а именно, чтобы подавлялось колебание продольного раскачивания и колебание подпрыгивания.
На фиг.2(В) схематически показана структура управления тяговым крутящим моментом по настоящему изобретению в форме блок-схемы управления (в этой связи следует отметить, что каждый управляющий блок (кроме С0 и С3) выполняется любым из устройства 50а управления тягой и устройства 50b управления торможением в электронном управляющем устройстве 50). Как показано на фиг.2(В) по существу при управлении тяговым крутящим моментом по настоящему изобретению готовятся контроллер тяги, который передает запрос на тягу от водителя на транспортное средство, и контроллер гашения колебаний для коррекции запроса на тягу от водителя так, чтобы можно было погасить колебания продольного раскачивания/колебания подпрыгивания кузова транспортного средства. В контроллере тяги после получения запроса на тягу от водителя, т.е. при нажатии на определенный угол педали акселератора (С0), этот запрос известным способом преобразуется (С1) в запрошенный тяговый крутящий момент; запрошенный тяговый крутящий момент преобразуется (С2) в управляющий запрос для тягового устройства, который и передается (С3) на тяговое устройство (управляющий запрос представляет собой заданный угол открытия дроссельной заслонки для бензинового двигателя внутреннего сгорания, заданное количество впрыскиваемого топлива для дизельного двигателя и заданный ток для электродвигателя и т.д.).
С другой стороны, контроллер гашения колебаний состоит из узла управления с прогнозированием и узла управления с обратной связью. Узел управления с прогнозированием имеет конструкцию так называемого оптимального регулятора, где, как поясняется ниже, величина крутящего момента на колесе, рассчитанная путем преобразования запрошенного тягового крутящего момента в блоке С1 (крутящий момент на колесе, запрошенный водителем Tw0), вводится в узел модели движения (С4) при колебаниях продольного раскачивания и колебаниях подпрыгивания кузова транспортного средства; и в этом узле (С4) модели движения рассчитываются реакции переменных состояния кузова транспортного средства на введенный крутящий момент; и рассчитывается корректирующая величина запрошенного крутящего момента на колесе для сведения переменных состояния к их минимумам (С5). Далее, в узле управления с обратной связью в узле оценки крутящего момента на колесе рассчитывается оценочная величина Tw крутящего момента на колесе (С6), как поясняется ниже, и оценочная величина крутящего момента на колесе, после умножения на коэффициент усиления FB системы управления с обратной связью (коэффициент усиления для балансировки соотношения между запрошенным водителем крутящим моментом Tw0 на колесе и оценочной величиной Tw крутящего момента на колесе в модели движения - С7) вводится в узел (С4) модели движения как возмущающий вход, одновременно суммируясь с запрошенным крутящим моментом на колесе, и, таким образом, по возмущению также рассчитывается и корректирующая составляющая запрошенного крутящего момента на колесе. Корректирующая величина для запрошенного крутящего момента на колесе в блоке (С5) преобразуется в единицу запрошенного крутящего момента для тягового устройства и передается на сумматор (С1а), и, таким образом, запрошенный тяговый крутящий момент, скорректированный так, чтобы не возникало колебаний продольного качания или колебаний подпрыгивания, преобразуется в управляющий запрос (С2) и подается на тяговое устройство (С3).
Принцип управления гашением колебаний
Как уже отмечалось, в управлении гашением колебаний по варианту настоящего изобретения сначала принимается динамическая модель движения кузова транспортного средства в направлении продольного качания и подпрыгивания, в которой уравнение состояния переменных состояния в направлении подпрыгивания и в направлении продольного раскачивания составлено так, что запрошенный водителем крутящий момент Tw0 на колесе и оценочная величина Tw крутящего момента на колесе являются входами. Затем из этого уравнения состояния с помощью теории оптимального регулятора определяют вход (величину крутящего момента), которая создает переменные состояния в направлении подпрыгивания и в направлении продольного раскачивания к 0, и на основе полученной величины крутящего момента корректируют запрошенный тяговый крутящий момент.
Для динамической модели движения кузова транспортного средства в направлении подпрыгивания и в направлении продольного раскачивания, например, как показано на фиг.3(А), кузов транспортного средства считают жестким телом S, имеющим массу М и момент инерции I, и полагают, что это жесткое тело S опирается на подвеску передних колес с модулем упругости kf и коэффициентом успокоения cf и на подвеску задних колес с модулем упругости kr и коэффициентом успокоения cr (модель колебаний подпружиненной массы кузова транспортного средства). В этом случае уравнения движения в направлении подпрыгивания и в направлении продольного раскачивания центроида кузова автомобиля можно выразить как приведенные ниже Уравнения (1а) и (1b):


где Lf и Lr - расстояния от центроида до оси передних колес и оси задних колес соответственно, r - радиус колеса, а h - высота центроида от поверхности дороги. В этом отношении следует заметить, что в выражении (1а) 1-й и 2-й члены являются составляющими силы от оси передних колес, а 3-й и 4-й члены являются составляющими силы от оси задних колес, а в выражении (1b) 1-й член является составляющей момента силы от оси передних колес, а 2-й член является составляющей момента силы от оси задних колес. 3-й член в выражении (1b) является составляющей момента силы, прилагаемой вокруг центроида кузова транспортного средства крутящим моментом Т (=Tw0+Tw), генерируемым на ведущем колесе.
Вышеприведенные Уравнения (1а) и (1b) можно записать в форме уравнения состояния (линейной системы), тогда как перемещения z и θ и их уровень изменения dz/dt и dθ/dt в кузове транспортного средства рассматриваются как составляющие переменного вектора Х(t) состояния, как в следующем Уравнении (2а):

где X(t), A и B соответственно равны
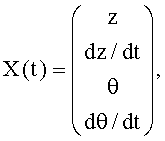
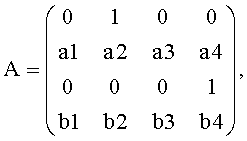
Соответствующие компоненты а1-а4 и b1-b4 в матрице А получены путем подбора коэффициентов z, θ, dz/dt и dθ/dt в выражениях (1а) и (1b):
a1=-(kf+kr)/M; a2=-(cf+cr)/M;
a3=-(kf·Lf-kr·Lr)/M; a4=-(cf·Lf-cr·Lr)/M;
b1=-(Lf·kf-Lr·kr)/I; b2=-(Lf·cf-Lr·cr)/I;
b3=-(Lf2·kf+Lr2·kr)/I; b4=-(Lf2·cf+Lr2·cr)/I.
Кроме того, u(t)=T,
который является входом системы, выраженным уравнением состояния (2а).
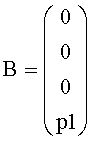
Соответственно из выражения (1b) компонент p1 матрицы В составляет:
р1=h/(I·r).
В Уравнении состояния (2а), если ввести

то Уравнение состояния (2а) принимает вид:

Таким образом, когда дифференциальное уравнение (2с) переменного вектора состояния X(t), решается при начальной величине X0(t), заданной как X0(t)=(0,0,0,0) (предполагается, что перед подачей крутящего момента колебания отсутствуют), величина u(t) крутящего момента, которая гасит колебания продольного раскачивания и колебания подпрыгивания будет определена путем определения коэффициента К усиления, который заставляет величину Х(t), т.е. смещения и уровень их изменений во времени в направлении продольного раскачивания и подпрыгивания, сходиться к 0.
Коэффициент К усиления можно определить с использованием так называемой теории оптимального регулятора. Согласно этой теории известно, что когда оценочная функция вторичной формы:

(где пределы интегрирования составляют от 0 до ∞)
становится минимальной, X(t) в уравнении (2а) состояния стабильно сходится и матрица К, которая приводит оценочную функцию J к ее минимуму, может быть выражена как:
K=R-1·BT·P,
где Р - решение уравнения Риккати:
-dP/dt=ATP+PA+Q-PBR-1BTP.
Уравнение Риккати можно решать любым способом, известным в области линейных систем, и таким образом можно определить коэффициент К усиления.
Q и R в оценочной функции J и в уравнении Риккати являются полуположительной определенной симметричной матрицей или положительной определенной симметричной матрицей, которую можно задать произвольно, соответственно, и они являются весовыми матрицами в оценочной функции J, определяемыми конструктором системы. Например, в случае рассматриваемой здесь модели движения Q и R можно задать как
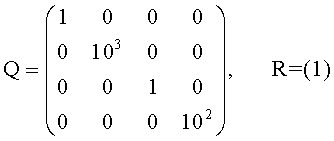
и в выражении (3а), если норму (величину) конкретной одной из составляющих вектора состояния, например dz/dt, dθ/dt, задать больше, чем норму других составляющих, например z, θ, то составляющая, норма которой задана большей, будет сходиться более стабильно. Более того, задавая большое значение величины составляющей Q, будет существенно учитываться переходная характеристика системы, а именно величины вектора состояния будут быстрее сходиться к стабильным величинам, а при задании большего значения для R сокращается потребление системой энергии.
При реальной работе устройства управления гашением колебаний, как показано на блок-схеме на фиг.2(В), переменный вектор X(t) состояния рассчитывается путем решения дифференциального уравнения (2а) с использованием на входе величины крутящего момента в модели С4 движения. Затем в С5 рассчитывается величина U(t) путем умножения вектора X(t) состояния, т.е. выхода из модели С4 движения, на коэффициент К усиления, определенный для схождения переменного вектора X(t) к 0 или его минимуму, как описано выше, и в сумматоре (С1а) величина U(t) после преобразования в единицы крутящего момента для тягового устройства вычитается из запрошенного крутящего момента (величину U(t) можно подавать по контуру обратной связи также на вход величины крутящего момента модели С4 движения для управления моделью С4 движения (обратная связь по состоянию). Система, выраженная выражениями (1а) и (1b), является резонансной системой, и поэтому для произвольного входа величины переменного вектора состояния образованы по существу частотными составляющими диапазона, имеющего определенные спектральные характеристики, в которых сконцентрирована резонансная частота системы. Соответственно, структура, в которой U(t) (его преобразованная величина) вычитается из запрошенного крутящего момента, корректирует компоненты резонансной частоты системы в запрошенном тяговом крутящем моменте, а именно компоненты, которые вызывают колебания продольного качания и колебания подпрыгивания кузова транспортного средства, так, что колебания продольного качания и колебания подпрыгивания кузова транспортного средства подавляются. А когда в Tw (возмущении), передаваемом от устройства оценки крутящего момента на колесе, происходит изменение, запрошенный крутящий момент корректируется на -U(t) так, что колебание, вызванное Tw (возмущением), стремится к пределу.
Резонансная частота колебания в направлении продольного раскачивания и в направлении подпрыгивания кузова транспортного средства, например обычного автомобиля, составляет 1-2 Гц, и для уровня скорости колебаний в этом частотном диапазоне в соответствии со скоростью управляющей реакции крутящего момента на колесе в таком транспортном средстве на запрос можно определить возмущение крутящего момента на колесе и ввести компенсирующую (корректирующую) величину U, отражающуюся в тяговом крутящем моменте на колесе, для противодействия возмущению. Таким образом, возмущающий крутящий момент, генерируемый на колесе и способный привести к колебаниям продольного раскачивания и колебаниям подпрыгивания, а также колебания продольного раскачивания и колебания подпрыгивания, вызванные им, будут погашены изменением тягового крутящего момента, создаваемого тяговым устройством, с помощью коррекции запрошенного тягового крутящего момента системой управления гашением колебаний.
В этой связи в качестве динамической модели движения кузова транспортного средства в направлении подпрыгивания и в направлении продольного раскачивания, например, как показано на фиг.3(В), можно применять модель, в которой принимаются в расчет пружинная упругость шины передних и задних колес, а также структура по фиг.3(А) (модель колебаний подпружиненной массы и неподпружиненной массы кузова транспортного средства). Когда шины передних и задних колес имеют модули упругости ktf и ktr соответственно, как показано на фиг.3(В), уравнение движения в направлении подпрыгивания и уравнение движения в направлении продольного раскачивания для центроида кузова автомобиля имеют следующий вид (4):




где xf и xr - величина смещения неподрессоренных масс передних и задних колес, mf и mr - неподрессоренные массы передних колес и задних колес. Как и в случае, показанном на фиг.3(А), выражения (4а)-(4d) являются уравнениями состояния, где z, θ, xf, xr и их величины относительного временного сдвига используются в переменном векторе состояния, как и в выражении (2а) (однако матрица А становится состоящей из восьми строк и восьми последовательностей, а матрица В становится состоящей из восьми строк и одной последовательности), и в соответствии с теорией оптимального регулятора можно определить матрицу К коэффициента усиления, которая заставляет величину переменного вектора состояния сходиться к 0. Фактическое управление гашением колебаний осуществляется аналогично случаю, показанному на фиг.3(А).
Расчет оценочной величины крутящего момента на колесе
В узле управления с обратной связью контроллера гашения колебаний по фиг.2(В), хотя было бы идеально реально детектировать крутящий момент на колесе с помощью датчика крутящего момента, установленного на каждом колесе, для ввода полученной величины в узел управления с прогнозированием как величины возмущения, как уже было указано, трудно установить датчик крутящего момента на каждом колесе обычного транспортного средства, и поэтому для расчетов применяется оценочная величина Tw крутящего момента, которая определяется узлом С6 оценки крутящего момента на колесе по любым другим параметрам, которые можно получить на движущемся транспортном средстве. На фиг.5 показана структура и работа узла с: оценки крутящего момента на колесе в форме управляющих блоков.
Типично оценочная величина Tw крутящего момента на колесе может быть получена по величине относительного временного сдвига частоты вращения ω колеса или по величине окружной скорости r∙ω, полученной от датчика частоты вращения ведущего колеса, как:

(фиг.5, С6а), где М - масса транспортного средства, а r - радиус колеса.
Предполагая, что сумма тяговых усилий, генерируемых соответствующими ведущими колесами на пятнах контакта с поверхностью дороги, равна общему тяговому усилию M∙G транспортного средства (где G - ускорение), крутящий момент на колее определяется по формуле

Поскольку ускорение G транспортного средства выводится из дифференциальной величины окружной скорости вращения колеса r∙ω как

то крутящий момент на колесе будет оцениваться, как в выражении (5).
При оценке крутящего момента на колесе, как описано выше, когда шина ведущего колеса находится в сцеплении с поверхностью дороги, генерируя тяговое усилие при движении транспортного средства, ожидается, что выражение (5) будет по существу согласующимся с фактически генерируемым крутящим моментом на колесе. Однако, когда реактивная сила поверхности дороги, воздействующая на ведущее колесо, увеличивается и превышает максимальный круг трения, шина переходит в состояние проскальзывания (когда шина начинает буксовать), и затем выражение (5b) становится недействительным и точность оценочной величины, полученной с помощью выражения (5), падает. Кроме того, из сигнала от датчиков частоты вращения колеса, обычно устанавливаемых на колесе, за исключением некоторых многофункциональных датчиков можно получить информацию о величине частоты вращения колеса, но информация о том, вращается ли колесо вперед или назад, недоступна. Таким образом, учитывая, что контроллер гашения колебаний обычно сконструирован исходя из предположения, что транспортное средство движется вперед, ввод вышеописанной оценочной величины в контроллер гашения колебаний, когда транспортное средство движется назад, приведет к вводу в контроллер гашения колебаний крутящего момента на колесе, вращающемся в направлении, противоположном расчетному. Далее, когда невозможно правильно определить скорость, например, когда датчик частоты вращения колеса сломан, точность оценочной величины крутящего момента на колесе по выражению (5) также снижается. Поэтому в настоящем изобретении в условиях, когда, как описано выше, предполагается, что точность оценочной величины крутящего момента на колесе, рассчитанной устройством С6 оценки, снижена, величина крутящего момента на колесе корректируется, как описано ниже.
Коррекция (1) оценочной величины крутящего момента на колесе
Когда шина ведущего колеса попадает в состояние проскальзывания, величина G ускорения, рассчитанная по относительному временному сдвигу частоты вращения колеса по формуле (5b), становится больше, чем реальное ускорение, и поэтому предполагается, что оценочная величина крутящего момента на колесе, рассчитанная по частоте вращения колеса, будет больше реальной. Таким образом, когда шина ведущего колеса попадает в состояние проскальзывания, оценочную величину крутящего момента на колесе корректируют в сторону уменьшения на основе произвольного показателя, указывающего на состояние проскальзывания шины (количественный параметр состояния проскальзывания колеса) (C6b). В этом случае, например, оценочная величина крутящего момента на колесе по выражению (5) может быть скорректирована в:

где kslip является величиной, данной как функция количественного параметра состояния проскальзывания колеса и которая определяется как показано на фиг.4. На фиг.4 важно отметить, что, когда шина находится в состоянии сцепления, kslip задается равным 1, а если шина попадает в состояние проскальзывания и полностью в состояние буксования колеса (состояние, когда крутящий момент на колесе не может быть приложен к транспортному средству), kslip задается равным 0.
Количественным параметром состояния проскальзывания колеса, показателем степени проскальзывания шины колеса, например, может быть отношение среднего от частот вращения левого и правого ведомых колес к среднему от частот вращения левого и правого ведущих колес. В этом случае, когда ведущее колесо попадает в состояние проскальзывания, частота вращения ведущего колеса относительно увеличивается и в результате отношение частоты вращения колеса, т.е. количественный параметр состояния проскальзывания колеса, уменьшается. Кроме того, в качестве количественного параметра состояния проскальзывания колеса можно использовать коэффициент скольжения или коэффициент проскальзывания шин. В этом отношении, когда количественный параметр состояния проскальзывания колеса определяется как величина, увеличивающаяся при увеличении степени проскальзывания, величина kslip уменьшается при увеличении количественного параметра состояния проскальзывания колеса, и, как показано на фиг.4, когда количественный параметр состояния проскальзывания колеса определяется, как величина, уменьшающаяся с увеличением степени проскальзывания, величина kslip должна уменьшаться при уменьшении количественного параметра состояния проскальзывания колеса, и следует понимать, что оба этих случая охватываются настоящим изобретением.
Коррекция оценочной величины крутящего момента на колесе коэффициентом kslip, как в выражении (6), может выполняться через мониторинг величины количественного параметра состояния проскальзывания колеса, однако она может также выполняться на основе величины количественного параметра состояния проскальзывания колеса при выполнении следующих условий (а)-(с):
(а) когда осуществляется управление VSC, TRC или ABS (когда осуществляются эти виды управления, обычно шина меняет свое состояние из состояния сцепления в состояние проскальзывания);
(b) когда разница между средним от частот вращения ведомых колес и средним от частот вращения ведущих колес превышает заданную величину в течение заданного периода;
(с) когда величина относительного временного сдвига частоты вращения колеса превышает заданный порог в течение заданного периода. В этом отношении заданный порог может быть задан на ускорение, которое транспортное средство не может создать.
Узел (С6с) расчета количественного параметра состояния проскальзывания, который выполняет расчеты количественного параметра состояния проскальзывания колеса, и узел (C6b) коррекции крутящего момента на колесе, который осуществляет коррекцию с помощью коэффициента kslip, реализованы через работу центрального процессора и других компонентов. Хотя предпочтительно узел С6с расчета количественного параметра состояния проскальзывания выполнен в устройстве 50b управления торможением, настоящее изобретение не ограничено такой компоновкой, и узел С6с может быть расположен в устройстве управления тягой.
Коррекция (2) оценочной величины крутящего момента на колесе
Как отмечено выше, с помощью нормального датчика частоты вращения колеса направление вращения колеса определить невозможно, так что оценочная величина, получаемая с помощью выражения (5) в устройстве оценки частоты вращения колеса, рассчитывается на основе предположения, что колесо вращается вперед. Поэтому, когда колесо вращается назад, знак оценочной величины будет противоположным тому, который должен быть. Поэтому устройство для оценки крутящего момента на колесе по настоящему изобретению определяет, когда колесо вращается назад, по информации не от датчика частоты вращения колеса, и, если такое состояние будет обнаружено, устройство оценки крутящего момента на колесе корректирует выражение (5), приводя его к виду:

и выводит оценочную величину (C6d) крутящего момента на колесе.
Вращение колеса назад можно определить, например, по тому, если:
(d) рычаг переключения передач в транспортном средстве с автоматической трансмиссией переведен в положение R; и
(е) в транспортном средстве с ручной трансмиссией выключатель фонаря заднего хода переведен в положение ВКЛ.
В этом отношении, если датчик частоты вращения колеса, установленный на колесе, способен определять направление вращения колеса, выражение (5) можно использовать, когда окружная скорость ω колеса переходит в область отрицательных значений при вращении колеса назад.
Коррекция (3) оценочной величины крутящего момента на колесе
Если в датчике частоты вращения колеса возникает какая-либо неисправность и точность определения частоты вращения колеса снижается, то точность оценочной величины крутящего момента на колесе, полученной с помощью выражения (5), также снижается, и поэтому в таких случаях окружная скорость или частота вращения ведущего колеса может быть рассчитана по частоте вращения тягового устройства (см. С6е на фиг.5). Когда используется окружная скорость Ne выходного вала двигателя внутреннего сгорания или электродвигателя тягового устройства, окружную скорость приводного колеса можно определить по следующей формуле:

Далее, когда используется окружная скорость No выходного вала трансмиссии, она определяется по формуле:

Затем оценочная величина окружной скорости ω ведущего колеса в выражении (8) или (9) меняется на выражение (5) (С6е→С6а) и тем самым рассчитывается оценочная величина крутящего момента на колесе.
Расчет оценочной величины крутящего момента на колесе по формуле (8) или (9) может выполняться, например, когда выполнено любое из условий (f)-(i):
(f) когда приходит ненормальный сигнал от датчика частоты вращения колеса и определяется «состояние неисправности»;
(g) когда в любом другом управляющем устройстве, таком как ABS, VSC и TRC, или в устройстве 50b (фиг.1 В) управления торможением определяется неисправность датчика частоты вращения колеса;
(h) когда разница между частотой вращения колеса, рассчитанной по сигналу от датчика частоты вращения колеса, и частотой вращения колеса, рассчитанной по частоте вращения выходного вала тягового устройства по выражению (8), превышает заданную величину в течение заданного периода; и
(i) когда разница между частотой вращения колеса, рассчитанной по сигналу от датчика частоты вращения колеса, и частотой вращения колеса, рассчитанной по частоте вращения выходного вала трансмиссии по выражению (9), превышает заданную величину в течение заданного периода.
В этой связи в настоящем варианте любая неисправность датчика частоты вращения колеса обнаруживается способом, хорошо известным специалистам, как описано выше, и сигнал, указывающий на такую неисправность, передается от устройства 50b управления торможением на устройство 50а управления тягой.
Кроме того, следует понимать, что устройство (С6) оценки крутящего момента на колесе может быть адаптировано так, чтобы выполнять все вышеописанные коррекции оценочной величины крутящего момента на колесе (фиг.5). В таком случае оценочная величина крутящего момента на колесе по выражению (5) будет корректироваться следующим образом:

где kslip обычно равен 1, и, когда возникает любое из вышеуказанных условий (а)-(с), он соответствует диаграмме по фиг.4 (C6b, C6c). ksign обычно равен 1, и, когда возникает вышеописанное состояние (d) или (e), он меняется на ksign=-1 (C6d). Далее, ω обычно является частотой вращения колеса, вычисленной по сигналу датчика частоты вращения колеса, и, когда возникает любое из состояний (f)-(i), она заменяется на ωe или ωо, полученными по выражениям (8) или (9) (С6е). Соответственно, например, когда возникают условия (а), (d) и (f), оценочная величина крутящего момента на колесе будет иметь вид:
Tw=-kslip·M·r2·dωe/dt.
Коррекция управления гашением колебаний
Что касается вышеописанного расчета оценочной величины крутящего момента на колесе, в случае, когда количественный параметр состояния проскальзывания колеса, указывающий на степень проскальзывания колеса, рассчитывается устройством управления торможением, таким как система ABS, TRC или VDIM, когда эти операции запрещены, количественный параметр состояния проскальзывания колеса рассчитан быть не может. В этом случае kslip в выражении (6) также не рассчитывается. Таким образом, когда эти различные вышеупомянутые системы управления работать не могут, коэффициент FB усиления обратной связи по фиг.2(В) уменьшается или устанавливается на 0 так, что оценочная величина Tw крутящего момента на колесе на входе модели С4 движения уменьшается или ее ввод прекращается. Конкретно, коэффициент FB усиления управления с обратной связью уменьшается, когда возникает любое из следующих условий (j)-(l):
(j) когда все переключатели ВКЛ-ВЫКЛ систем ABS, VSC или TRC переведены в положение ВЫКЛ;
(k) когда переключатель ВКЛ-ВЫКЛ системы VDIM переведен в положение ВЫКЛ; и
(l) когда срабатывание систем ABS, VSC, TRC или VDIM запрещено из-за любой неисправности тормозного устройства.
В этом отношении типично коэффициент FB усиления управления с обратной связью устанавливается на FB=0, когда возникает любое из условий (j)-(l), так что вероятность возникновения проскальзывания невелика, когда частота вращения колеса невысока и, следовательно, при увеличении частоты вращения колеса коэффициент усиления FB может быть уменьшен, например:

где λ - положительная постоянная, определяемая экспериментально или теоретически. В этом случае, если частота вращения колеса становится высокой, величина FB по существу устанавливается на 0.
С другой стороны, при коррекции управляемой переменной для управления гашением колебаний на основе запрошенного тягового крутящего момента, преобразованного из запроса тяги водителем, а именно при коррекции управляемой переменной путем управления с прогнозированием, оценочная величина крутящего момента на колесе не используется (поскольку модель движения является линейной моделью) и, следовательно, коррекция управляемой переменной при управлении с прогнозированием может осуществляться без этой оценочной величины даже, если возникнет любое из условий (j)-(l). Однако в случае, когда невозможно определить, находится ли колесо в состоянии проскальзывания или нет, увеличение тягового крутящего момента может усугубить состояние проскальзывания. Поэтому амплитуда управляемой переменной для управления гашением колебаний может быть уменьшена, или само управление гашением колебаний может быть приостановлено. Например, амплитуда управляемой переменной может уменьшаться с увеличением величины частоты вращения колеса, как и в выражении (9).
Более того, в случае, когда будет определено, что точность оценочной величины крутящего момента на колесе не улучшается даже при коррекции 1-3 оценочной величины крутящего момента на колесе, когда не возникает ни одного из условий (j)-(l), подача оценочной величины крутящего момента на колесе на вход модели С4 движения может быть приостановлена. Далее, учитывая, что целью управления гашением колебаний по настоящему изобретению является повышения стабильности работы водителя и комфорта поездки, условия, при которых должны выполняться коррекции 1-3 оценочной величины крутящего момента на колесе, например, когда колесо попадает в состояние проскальзывания; когда транспортное средство движется задним ходом; когда возникают любые неисправности в датчике частоты вращения колеса и т.п., являются особыми условиями движения транспортного средства и в некоторых случаях можно применять любые другие виды управления для стабилизации движения транспортного средства и/или обеспечения его безопасности и поэтому ввод оценочной величины крутящего момента на колесе в модель С4 движения можно приостанавливать. Соответственно, в управляющей структуре по фиг.2(В), когда возникает условие (a)-(i), ввод оценочной величины крутящего момента на колесе в модель С4 движения можно приостанавливать. Далее, в случае, когда колесо попадает в состояние проскальзывания, когда степень проскальзывания, на которую указывает количественный параметр состояния проскальзывания колеса, превышает заданную величину, например, когда количественный параметр состояния проскальзывания колеса ниже заданной величины S по диаграмме на фиг.4, можно задавать kslip=0, как показано пунктирной линией, так что ввод оценочной величины крутящего момента на колесе в модель С4 движения можно по существу приостановить. Кроме того, когда возникают условия (а)-(i), осуществление управления гашением колебаний можно приостановить (коррекция крутящего момента, запрошенного водителем, может быть приостановлена) путем задания U(t)=0.
Хотя вышеприведенное описание относится к вариантам настоящего изобретения, специалистам очевидно, что в него могут быть внесены различные изменения и модификации и что настоящее изобретение не ограничивается показанными выше вариантами и может применяться в различных устройствах без отхода от изобретательской идеи настоящего изобретения.
Например, хотя устройство оценки крутящего момента на колесе в вышеописанном варианте встроено в контроллер гашения колебаний, устройство оценки крутящего момента на колесе может быть построено как независимое устройство. Далее, хотя устройство оценки крутящего момента на колесе в вышеприведенном варианте было описано как оценивающее крутящий момент на ведущем колесе во время движения транспортного средства, можно корректировать оценочную величину крутящего момента на каждом колесе, полученную на основе частоты вращения соответствующего колеса, чтобы оценивать крутящие моменты на ведущем колесе и на ведомом колесе во время торможения в соответствии с количественным параметром состояния проскальзывания колеса или в зависимости от того, вращается колесо вперед или назад, и такие случаи также входят в объем настоящего изобретения.
Кроме того, хотя оценочная величина крутящего момента на колесе в вышеописанном варианте оценивается по частоте вращения колеса, эта оценочная величина крутящего момента может быть получена не на основе частоты вращения колеса, а по другому параметру, и существует возможность, что оценочная величина и фактическая величина могут отличаться друг от друга во время проскальзывания колеса или во время вращения колеса назад.
Более того, хотя управление гашением колебаний в вышеописанном варианте является управлением, при котором предполагается использование модели движения подрессоренной массы или модели движения подрессоренной массы и неподрессоренной массы и использование теории оптимального регулятора, концепция настоящего изобретения может применяться к процессам управления, осуществляющим гашение колебаний с использованием других моделей движения и/или к способам управления, не относящимся к оптимальному регулятору, если в них используется оценочная величина крутящего момента на колесе, и такие случаи также включены в объем настоящего изобретения.
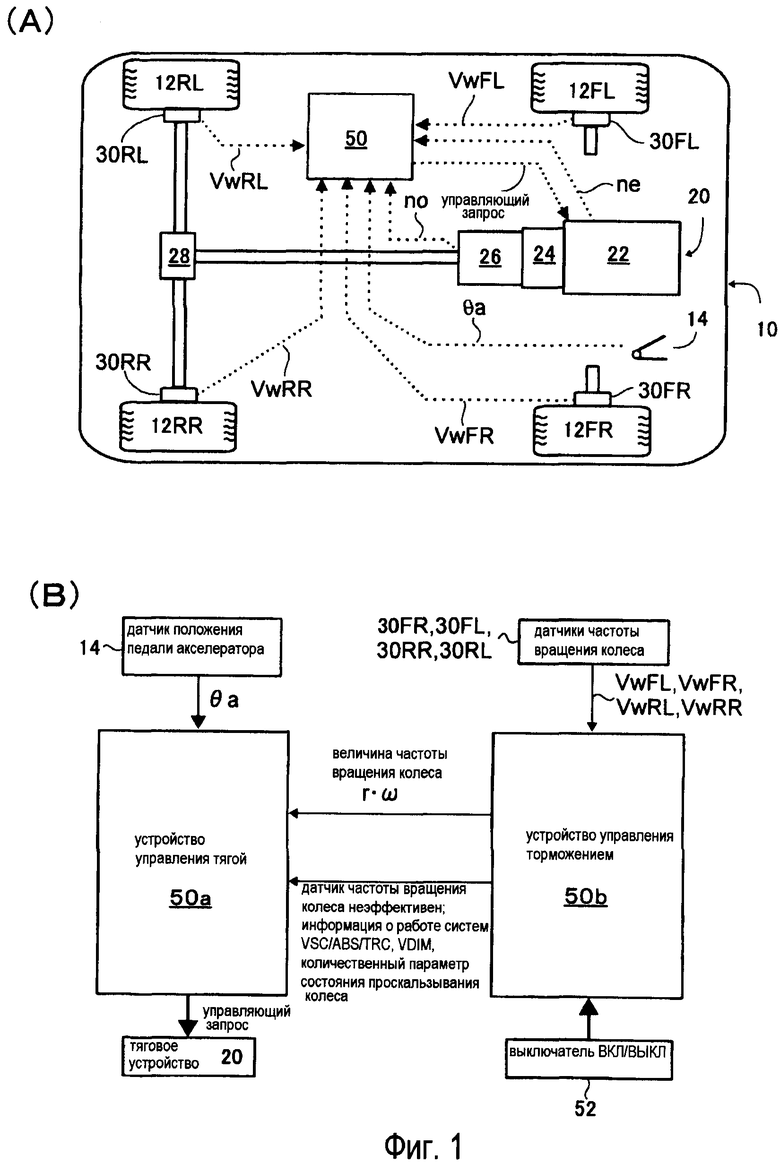
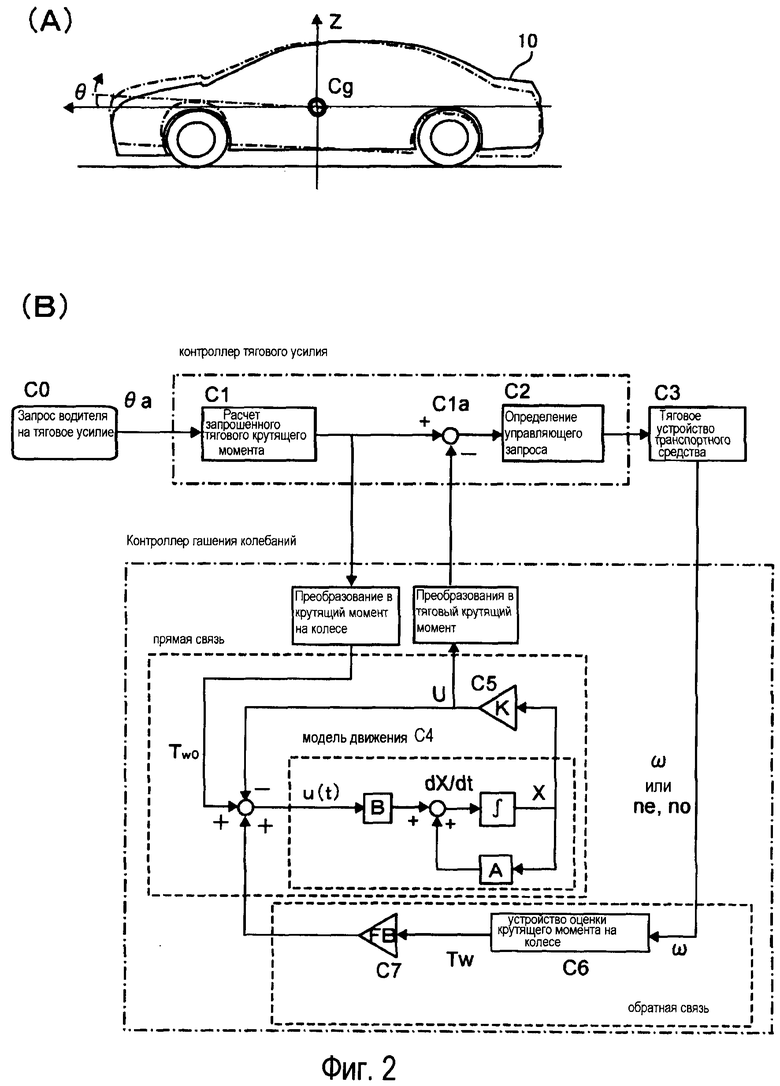

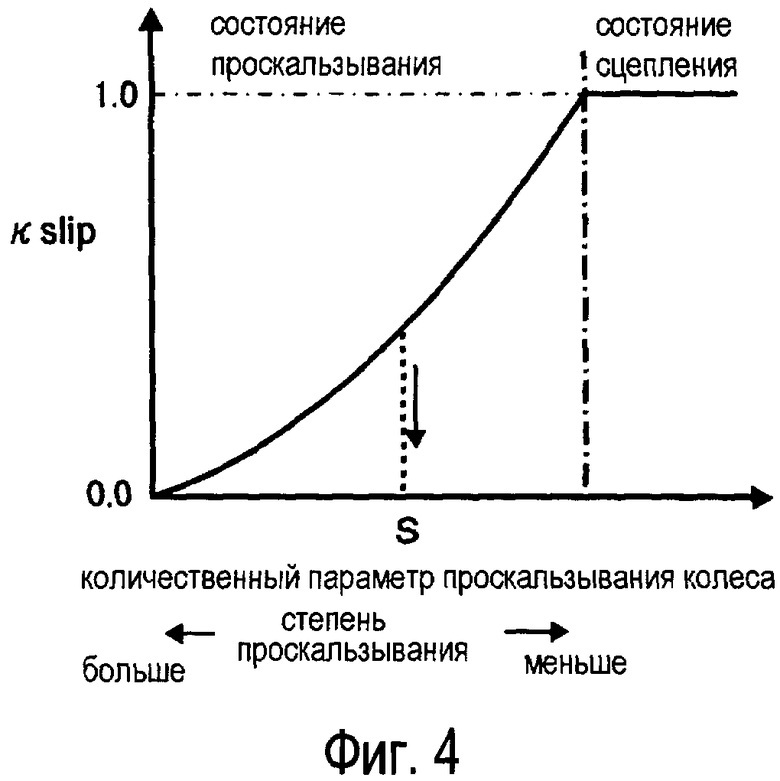
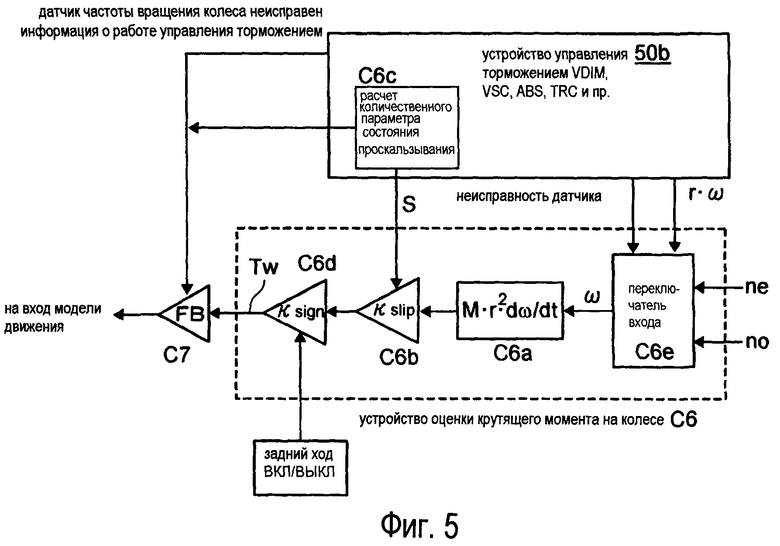
Изобретение относится к устройству управления гашением колебаний транспортного средства. В устройстве по первому варианту абсолютная величина оценочной величины крутящего момента на колесе или управляемая переменная тягового крутящего момента корректируется в сторону уменьшения, когда степень проскальзывания увеличивается. В устройстве по второму варианту оценочная величина крутящего момента на колесе является отрицательной величиной, когда транспортное средство движется задним ходом. В устройстве по третьему варианту управление тяговым крутящим моментом на основе оценочной величины крутящего момента на колесе прекращается, когда степень проскальзывания превышает заданную степень или когда транспортное средство движется задним ходом. В устройстве по четвертому варианту управляемая переменная тягового крутящего момента уменьшается, когда устройство управления торможением находится в нерабочем состоянии. Устройство оценки крутящего момента по первому варианту содержит узел оценки крутящего момента, узел расчета количественного параметра состояния проскальзывания колеса, узел коррекции крутящего момента на колесе. В устройстве оценки крутящего момента по второму варианту узел коррекции крутящего момента на колесе корректирует оценочную величину крутящего момента на колесе в область отрицательных значений, когда транспортное средство движется задним ходом. Технический результат заключается в повышении эффективности оценки крутящего момента на колесе. 6 н. и 15 з.п. ф-лы, 8 ил.
1. Устройство управления гашением колебаний транспортного средства, подавляющее колебания продольного раскачивания или колебания подпрыгивания транспортного средства путем управления выходной мощностью привода, отличающееся тем, что оно содержит узел определения оценочной величины крутящего момента на колесе, который определяет оценочную величину крутящего момента на колесе, генерируемого в пятне контакта колеса транспортного средства с поверхностью дороги, и воздействующего на колесо, и узел управления тяговым крутящим моментом, который управляет тяговым крутящим моментом транспортного средства для подавления амплитуд колебаний продольного раскачивания и колебаний подпрыгивания на основе оценочной величины крутящего момента, при этом имеется узел определения количественного параметра состояния проскальзывания, который определяет количественный параметр состояния проскальзывания колеса, и абсолютная величина оценочной величины крутящего момента на колесе или управляемая переменная тягового крутящего момента корректируется в сторону уменьшения, когда степень проскальзывания, на которую указывает количественный параметр состояния проскальзывания колеса, увеличивается.
2. Устройство по п.1, отличающееся тем, что оценочная величина крутящего момента на колесе переходит в область отрицательных значений, когда колесо вращается назад.
3. Устройство по п.1, отличающееся тем, что количественным параметром состояния проскальзывания колеса является отношение частоты вращения ведущего колеса транспортного средства к частоте вращения ведомого колеса транспортного средства.
4. Устройство по п.1, отличающееся тем, что оценочная величина крутящего момента на колесе является функцией дифференциальной величины частоты вращения колеса, определенной с помощью датчика частоты вращения ведущего колеса транспортного средства.
5. Устройство по п.1, отличающееся тем, что оценочная величина крутящего момента на колесе является величиной, основанной на частоте вращения колеса, обнаруженной датчиком частоты вращений ведущего колеса транспортного средства, и оценочная величина крутящего момента на колесе является оценочной величиной, основанной на частоте вращения выходного вала тягового устройства транспортного средства, когда датчик частоты вращения колеса неисправен.
6. Устройство по п.1, отличающееся тем, что оценочная величина крутящего момента на колесе является величиной, основанной на частоте вращения колеса, обнаруженной датчиком частоты вращения ведущего колеса транспортного средства, и управление тяговым крутящим моментом на основе оценочной величины крутящего момента на колесе останавливается, когда датчик частоты вращения колеса неисправен.
7. Устройство управления гашением колебаний транспортного средства, подавляющее колебания продольного раскачивания и колебания подпрыгивания транспортного средства путем управления выходной мощностью привода транспортного средства, отличающееся тем, что оно содержит узел определения оценочной величины крутящего момента на колесе, который определяет оценочную величину крутящего момента на колесе, генерируемого в пятне контакта колеса транспортного средства с поверхностью дороги и воздействующего на колесо, при этом оценочная величина крутящего момента на колесе определяется на основе частоты вращения колеса, определенной датчиком частоты вращения этого колеса, и узел управления тяговым крутящим моментом, который управляет тяговым крутящим моментом транспортного средства для подавления амплитуд колебаний продольного раскачивания и колебаний подпрыгивания на основе оценочной величины крутящего момента на колесе, при этом устройство управляет тяговым усилием транспортного средства, предполагая, что оценочная величина крутящего момента на колесе является отрицательной величиной, когда транспортное средство движется задним ходом.
8. Устройство по п.7, отличающееся тем что оценочная величина крутящего момента на колесе является величиной, основанной на частоте вращения колеса, определенной датчиком частоты вращения ведущего колеса транспортного средства, и оценочная величина крутящего момента на колесе является величиной, определенной на частоте вращения выходного вала тягового устройства транспортного средства, когда датчик частоты вращения колеса неисправен.
9. Устройство по п.7, отличающееся тем, что оценочная величина крутящего момента на колесе является величиной, основанной на частоте вращения колеса, определенной датчиком частоты вращения ведущего колеса транспортного средства, и управление тяговым крутящим моментом на основе оценочной величины крутящего момента на колесе останавливается, когда датчик частоты вращения колеса неисправен.
10. Устройство управления гашением колебаний транспортного средства, подавляющее колебания продольного раскачивания и колебания подпрыгивания транспортного средства путем управления выходной мощностью транспортного средства, отличающееся тем, что оно содержит узел определения оценочной величины крутящего момента на колесе, который определяет оценочную величину крутящего момента на колесе, генерируемого на пятне контакта колеса транспортного средства с поверхностью дороги и воздействующего на колесо, и узел управления тяговым крутящим моментом, который управляет тяговым крутящим моментом транспортного средства для подавления амплитуд колебаний продольного раскачивания и колебаний подпрыгивания на основе оценочной величины крутящего момента на колесе, при этом управление тяговым крутящим моментом на основе оценочной величины крутящего момента на колесе прекращается, когда степень проскальзывания, выраженная через количественный параметр состояния проскальзывания, указывающий на состояние проскальзывания колеса, превышает заданную степень, или когда транспортное средство движется задним ходом.
11. Устройство управления гашением колебаний транспортного средства, подавляющее колебания продольного раскачивания и колебания подпрыгивания транспортного средства путем управления выходной мощностью транспортного средства, отличающееся тем, что оно содержит узел определения оценочной величины крутящего момента на колесе, который определяет оценочную величину крутящего момента на колесе, генерируемого на пятне контакта колеса транспортного средства с поверхностью дороги и воздействующего на колесо, узел управления тяговым крутящим моментом, который управляет тяговым крутящим моментом транспортного средства для подавления амплитуд колебаний продольного раскачивания и колебаний подпрыгивания на основе оценочной величины крутящего момента на колесе, и узел приема количественного параметра состояния проскальзывания, который принимает количественный параметр состояния проскальзывания, указывающий на состояние проскальзывания колеса от устройства управления торможением транспортного средства для уменьшения проскальзывания колеса, и устройство, корректирующее управляемую переменную тягового крутящего момента на основе степени проскальзывания, выраженной количественным параметром состояния проскальзывания колеса, при этом управляемая переменная тягового крутящего момента уменьшается, когда устройство управления торможением находится в нерабочем состоянии, по сравнению с величиной этой управляемой переменной, когда устройство управления торможением работает.
12. Устройство по п.11, отличающееся тем, что управляемая переменная тягового крутящего момента узла управления тяговым крутящим моментом определена на основе оценочной величины крутящего момента на колесе и величины тягового усилия, запрошенной водителем транспортного средства, и управляемая переменная тягового крутящего момента на основе оценочной величины крутящего момента на колесе уменьшается по существу до 0, когда устройство управления торможением является неработоспособным.
13. Устройство по п.11, отличающееся тем, что устройство управления торможением является, по меньшей мере, одним устройством, выбранным из группы, состоящей из: системы ABS, VSC или TRC, выполненным с возможностью селективного включения в работу водителем транспортного средства, и управляемая переменная тягового крутящего момента уменьшается, когда устройство управления торможением отключается водителем по сравнению с величиной этой управляемой переменной при работе этого устройства управления торможением.
14. Устройство по п.11, отличающееся тем, что устройство управления торможением является частью интегрированной системы управления динамикой транспортного средства (VDIM), селективно включаемой водителем транспортного средства, и управляемая переменная тягового крутящего момента уменьшается, когда система VDIM отключается по выбору водителя.
15. Устройство по п.11, отличающееся тем, что управляемая переменная тягового крутящего момента уменьшается, когда устройство управления торможением транспортного средства неработоспособна из-за отказа тормозного устройства транспортного средства, по сравнению с величиной этой управляемой переменной, когда устройство управления торможением работает.
16. Устройство по п.11, отличающееся тем, что коррекция абсолютной величины оценочной величины крутящего момента на колесе или управляемой переменной тягового крутящего момента осуществляется в сторону уменьшения при увеличении степени проскальзывания, выраженной количественным параметром состояния проскальзывания колеса.
17. Устройство оценки крутящего момента, возникающего между колесом и поверхностью дороги, отличающееся тем, что оно содержит узел оценки крутящего момента, который оценивает величину крутящего момента на колесе, генерируемого на пятне контакта колеса с поверхностью дороги и воздействующего на колесо, узел расчета количественного параметра состояния проскальзывания колеса, который рассчитывает количественный параметр состояния проскальзывания колеса, указывающий на состояние проскальзывания колеса, и узел коррекции крутящего момента на колесе, который корректирует оценочную величину крутящего момента на колесе так, что абсолютная величина оценочной величины крутящего момента на колесе уменьшается при увеличении степени проскальзывания, выраженной количественным параметром состояния проскальзывания колеса.
18. Устройство по п.17, отличающееся тем, что рассчитывает оценочную величину крутящего момента на колесе как отрицательную величину, когда колесо вращается назад.
19. Устройство по п.17, отличающееся тем, что количественный параметр состояния проскальзывания колеса является отношением частоты вращения ведущего колеса транспортного средства к частоте вращения ведомого колеса транспортного средства.
20. Устройство по п.17, отличающееся тем, что оценочная величина крутящего момента на колесе является функцией дифференциальной величины частоты вращения колеса, определенной датчиком частоты вращения ведущего колеса транспортного средства.
21. Устройство оценки крутящего момента на колесе, действующего между колесом транспортного средства и поверхностью дороги, отличающееся тем, что оно содержит узел оценки крутящего момента, который на основе частоты вращения колеса, определенной датчиком вращения колеса, определяет оценочную величину крутящего момента на колесе, генерируемого в пятне контакта колеса с поверхностью дороги и воздействующего на колесо, и узел коррекции крутящего момента на колесе, который корректирует оценочную величину крутящего момента на колесе в область отрицательных значений, когда транспортное средство движется задним ходом.
| Способ получения сверхпроводящего тонкого слоя | 1988 |
|
SU1632382A3 |
| US 5868474 А, 09.02.1999 | |||
| JP 6122332 А, 06.05.1994 | |||
| JP 7333239 А, 22.12.1995 | |||
| JP 5085342 А, 06.04.1993 | |||
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |

