Настоящее изобретение относится к устройству, имеющему несколько элементов, которые могут перемещаться относительно друг друга. Один из элементов считается фиксированным, то есть, элементом, образующим эталонную базу. Эта эталонная база сама по себе также может быть подвижной, например, как шасси транспортного средства. Такое транспортное средство может содержать, например, шарнирно сочлененные рычаги, образующие элементы, являющиеся подвижными относительно этого фиксированного элемента.
Устройство может содержать датчики, которые позволяют определять наличие движения подвижных элементов. Эти датчики, например, такие как датчики положения, скорости или ускорения, закреплены на подвижных элементах и должны передавать полученную информацию на фиксированных элемент. Подвижные элементы также могут оснащаться датчиками других типов, позволяющими измерять конкретную физическую величину. Например, шарнирно сочлененный рычаг может нести датчик, измеряющий параметры окружающей среды (температуру, давление и пр.). Движение рычага позволяет достигать конкретных зон в пространстве.
Все эти датчики по существу возвращают полученную информацию на фиксированный элемент устройства для обработки в нем.
Решения, чаще всего применяемое для передачи информации между подвижным датчиком и фиксированным элементом, заключается в подключении датчика электрическими проводами. Эти электрические провода проходят вдоль соединительных элементов, которые соединяют фиксированный элемент с подвижным элементом, несущим датчик. Провода приходится прокладывать сквозь шарниры, соединяющие друг с другом разные элементы.
При эксплуатации устройства возникает риск повреждения проводов, например, при зацеплении с посторонним объектом. Кроме того, провода часто проводят электрические сигналы низкой интенсивности, которые могут искажаться под влиянием электромагнитного излучения в окружающей среде. Например, датчики пьезоэлектрического типа выдают особенно низкоуровневые сигналы. Провода, связанные с этими датчиками, не могут иметь большую длину, не искажая информацию от датчиков.
В конкретном случае цилиндра, в котором шток совершает поступательные перемещения относительно тела цилиндра, обычно на штоке устанавливают датчик, позволяющий определить положение штока относительно тела. Этот датчик соединен проводом с телом цилиндра. Обычные цилиндры являются осесимметричными и шток может свободно вращаться вокруг оси поступательного перемещения. Эта свобода вращения может причинить вред проводу, у которого появляется риск намотаться вокруг штока. Таким образом, возникает необходимость устанавливать устройство, предотвращающее вращение штока, что необоснованно усложняет цилиндр.
Также рассматривалась возможность создания беспроводного канала, например, радиоканала, между датчиком и фиксированным элементом. Канал такого типа пригоден для передачи данных от датчика, но остается уязвимым для электромагнитных помех. Кроме того, не обеспечивается подача энергии на датчик. Поэтому необходим аккумулятор, прикрепленный к датчику, для его питания. Этот аккумулятор должен иметь достаточный срок службы, чтобы обеспечить работу датчика и передачу информации на фиксированный элемент. Необходимо также обеспечить периодическую перезарядку аккумулятора или замену элемента питания, что увеличивает эксплуатационные расходы.
Задачей настоящего изобретения является устранение всех или некоторых из вышеупомянутых проблем предшествующего уровня техники и разработка устройства, имеющего по меньшей мере один датчик, имеющий беспроводное соединение как для передачи информации, так и для получения питания.
Для решения задачи предлагается устройство, содержащее фиксированный элемент, подвижный элемент, датчик для измерения физического параметра, закрепленный на подвижном элементе, и канал связи, допускающий передачу информации между датчиком и фиксированным элементом, при этом датчик генерирует первичный сигнал, представляющий физический параметр. Согласно настоящему изобретению устройство далее содержит преобразователь первичного сигнала в световой сигнал. Этот преобразователь закреплен на подвижном элементе. Канал связи является оптическим трактом. Световой сигнал свободно распространяется между фиксированным элементом и подвижным элементом по оптическому тракту. Датчик содержит модуль питания, бесконтактно получающий энергию от фиксированного элемента.
Применение режима свободного распространения по всему оптическому тракту позволяет избавиться от любых проводов или электрических проводников, или оптических волокон.
Преимущественно, оптический тракт полностью расположен внутри непрозрачной оболочки устройства.
Альтернативно, датчик моет содержать обмотку якоря, связанную с модулем питания. Устройство может содержать обмотку возбуждения, прикрепленную к фиксированному элементу. В конкретном положении фиксированного элемента и подвижного элемента, обмотка возбуждения и обмотка якоря находятся достаточно близко друг к другу, чтобы обмениваться достаточным количеством энергии для запитывания датчика.
В этом конкретном варианте изобретения устройство содержит цилиндр. Фиксированным элементом является тело цилиндра, а подвижным элементом является шток цилиндра. Оптический тракт расположен в штоке цилиндра.
В конкретном варианте и при индуктивном питании, таким конкретным положением являются крайние положения цилиндра.
Изобретение будет более понятно и другие его преимущества станут очевидными из нижеследующего подробного описания варианта его осуществления, приводимого со ссылками на приложенные чертежи, на которых:
Фиг. 1 изображает устройство по настоящему изобретению.
Фиг. 2а и 2b изображают схему оптического тракта, реализованного в устройстве по фиг. 1.
Фиг. 3а и 3b - конкретное применение изобретения в линейном цилиндре.
Для ясности на разных чертежах некоторые элементы обозначены одними и теми же позициями.
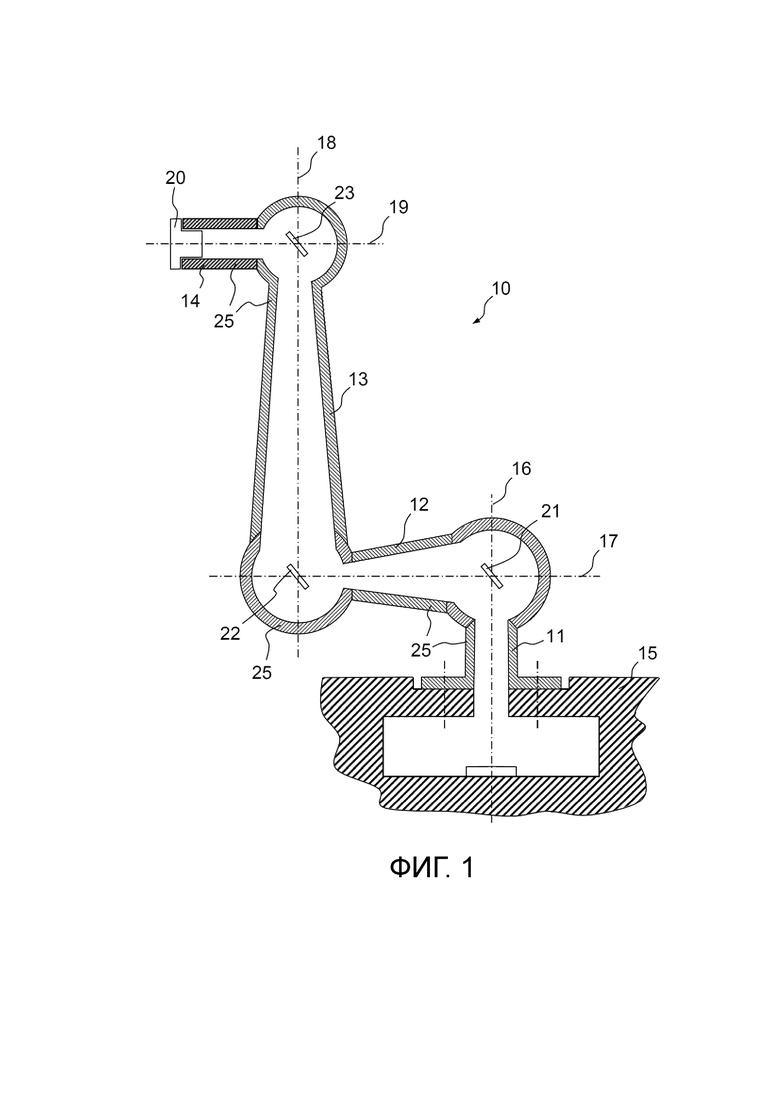
На фиг. 1 в частичном сечении представлено устройство, например, роботизированная рука 10. Рука 10 содержит несколько шарнирно сочлененных сегментов 11, 12, 13 и 14. Сегмент 11 закреплен на опоре 15 руки 10. Опора считается фиксированным элементом. Сегмент 11 проходит в основном вдоль оси 16. Сегмент 12 проходит вдоль оси 17. Также, сегмент 13 проходит вдоль оси 18 относительно сегмента 12. Наконец, сегмент 14 проходит вдоль оси 19 и имеет возможность вращаться вокруг оси 19 относительно сегмента 13. Датчик 20 закреплен на сегменте 14. Структура руки 10 приведена только для примера. Различные вращения осуществляются моторизовано и привода, осуществляющие такие вращения, не показаны, чтобы не усложнять иллюстрацию. Рука 10 может выполнять и другие функции, помимо несения датчика 20, например, механическую функцию захвата объектов с помощью зажима, прикрепленного к сегменту 14.
Изобретение может быть реализовано вне зависимости от количества сегментов и вне зависимости от типа шарнирного сочленения. Движения могут быть вращательными и/или поступательными.
Датчик 20 посылает сигнал, представляющий физический параметр, который измеряет датчик, например, температуру или давление на конце сегмента 14, движение, скорость или ускорение конца сегмента 14. В общем виде, изобретение может применяться для измерения физического параметра любого типа.
Датчик 20 посылает сигнал, представляющий физический параметр, который он измеряет. Для отказа от проводов между сегментом 14 и опорой 15, сигнал между датчиком 20 и опорой 15 передается оптически, используя режим свободного распространения, т.е., без использования оптоволокна. Для этого рука 10 сконструирована так, чтобы создавать ненаправленный оптический тракт между датчиком 20 и опорой 15. В представленном примере оптический тракт следует по осям 19, 18, 17 и 16. На каждом шарнирном сочленении оптический тракт имеет зеркало, обеспечивающее угловое изменение направления оптического тракта. Более конкретно, зеркало 21 изменяет направление оптического тракта между осью 16 и осью 17, зеркало 22 изменяет направление оптического тракта между осью 17 и осью 18, а зеркало 23 изменяет направление оптического тракта между осью 18 и осью 19. Разумеется, понятно, что количество зеркал зависит от количества сочленений и их соответствующих степеней свободы. Для поступательного перемещения зеркала априори не нужны.
Преимущественно, оптический тракт применяемый для передачи сигнала между датчиком 20 и опорой 15 полностью расположен внутри руки 10. Другими словами, рука 10 содержит непрозрачный кожух 25 и оптический тракт полностью проходит внутри кожуха 25. Это позволяет изолировать световое излучение, применяемое для передачи сигнала, от постороннего света, источником которого является окружающая среда за пределами руки 10.
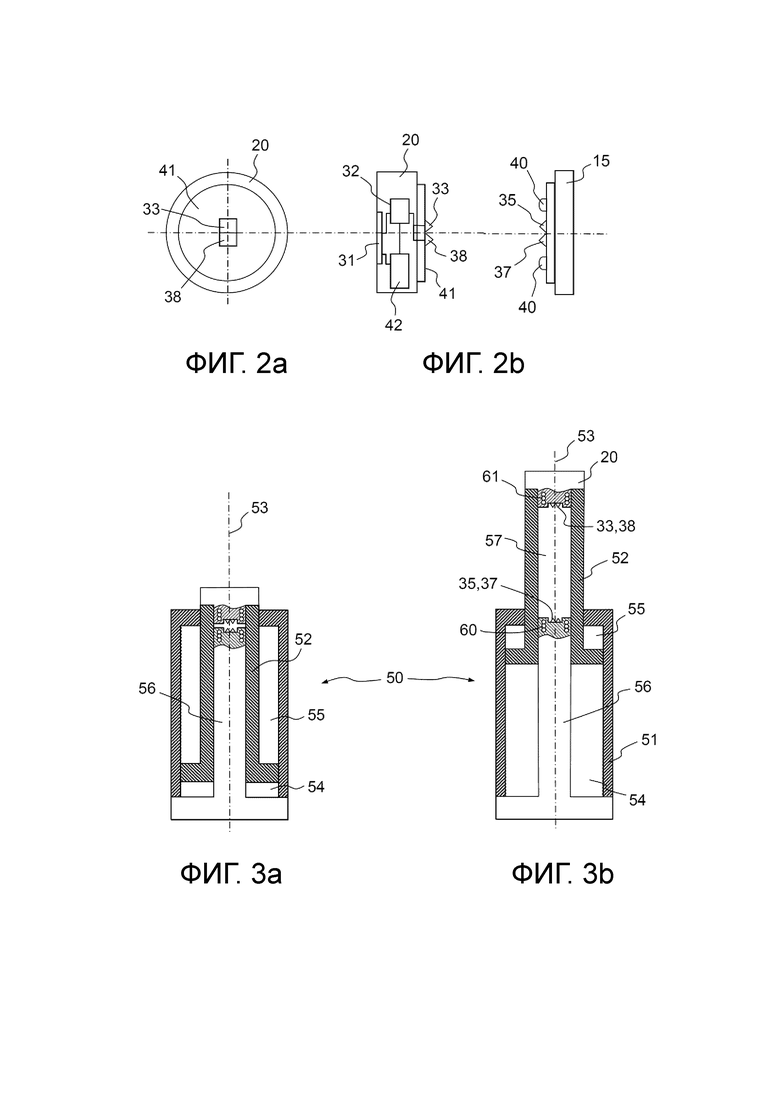
На фиг. 2а и 2b схематически показан оптический тракт, проложенный в руке 10. Для упрощения зеркала не показаны. На фиг. 2а показан датчик 20, расположенный под прямым углом к оптическому тракту, а на фиг. 2b показан датчик 20 и опора 15 в профиль. Оптический тракт проходит в плоскости чертежа на фиг. 2b.
Датчик 20 содержит ячейку 31, чувствительную к измеряемому физическому параметру. Она может быть, например, термопарой для измерения температуры, пьезоэлектрической ячейкой для измерения давления или силы, акселерометром и т.п. Для обеспечения передачи сигнала, представляющего физический параметр, между датчиком 20 и опорой 15, датчик 20 содержит модуль 32 обработки сигнала и излучатель 33 света. Модуль 32 соединен с ячейкой 31 и с излучателем 33. Модуль 32 и излучатель 33 образуют преобразователь сигнала, который именуется первичным сигналом, поступающим от ячейки 31 и преобразуется в световой сигнал. Ячейка 31, модуль 32 и излучатель 33 скреплены друг с другом. Другими словами, при движениях руки 10 различные компоненты датчика 20 неподвижны относительно друг друга. Первичный сигнал может быть аналоговым электрическим сигналом и световой сигнал может модулировать интенсивность света, излучаемого излучателем 33, также аналоговым, или цифровым способом.
Опора 15 содержит приемник 35, расположенный в оптическом тракте так, чтобы принимать сигнал от излучателя 33. Обработка светового сигнала, полученного приемником 35, осуществляется в опоре 15. Для упрощения чертежа эта обработка не показана.
Передача светового сигнала между датчиком 20 и опорой 15 моет быть односторонней, от излучателя 33 до приемника 25. Можно также организовать двустороннюю передачу, например, для калибровки датчика 20 ли для проверки правильности его работы. Для этого, опора 15 содержит излучатель 37 света, а датчик 20 содержит приемник 38 света. Излучатель 37 и приемник 38 также расположены в оптическом тракте, связывающем датчик 20 и опору 15.
Для подачи энергии на датчик 20 можно бесконтактным способом передавать энергию от опоры 15 на датчик 20, например, в форме светового луча. Для этого опора 15 содержит излучатель 40 света, а датчик 20 содержит фотоэлектрический преобразователь 41, связанные с модулем 42 питания датчика 20. Излучатель 40 и фотоэлектрический преобразователь 41 преимущественно расположены в том же оптическом тракте, который используется для передачи сигналов. Для передачи энергии между опорой 15 и датчиком 20 используется режим свободного распространения по всему оптическому тракту, как и для передачи информации. Применяются зеркала, которые используются для передачи сигналов. Альтернативно, для подачи питания на датчик 20 можно использовать второй оптический тракт, отдельный от тракта, используемого для передачи сигналов. Излучатель 40 света может содержать может содержать один или множество силовых светоизлучающих диодов, окружающих приемник 35 и излучатель 37. Можно также использовать один и тот же светоизлучающий диод для выполнения функций обоих излучателей 37 и 40. Световая энергия, необходимая для питания датчика 20 передается со средней интенсивностью света, а сигнал передается путем модулирования этой интенсивности вокруг средней интенсивности.
На стороне датчика 20 фотоэлектрический преобразователь 41 имеет, например, круглую форму. Излучатель 33 и приемник 38, например, расположены в центре фотоэлектрического преобразователя 41.
Модуль 42 источника питания получает энергию от фотоэлектрического преобразователя 41 и запитывает ячейку 31, чувствительную к измеряемому физическому параметру, и модуль 31 обработки сигнала. Можно непрерывно запитывать датчик 20, когда он находится в работе, с помощью энергии, передаваемой в форме света. Непрерывная подача питания позволяет отказаться от любых средств накопления энергии в датчике 20.
На фиг. 3а и 3b настоящее изобретение применяется в линейном цилиндре 50, содержащем тело 51, считающееся фиксированным, и шток 52, который совершает поступательные перемещения относительно тела 51 вдоль оси 53. Движение цилиндра 50 вызывается обычно давлением рабочей среды в камере 54, если цилиндр является цилиндром одностороннего действия или в двух камерах 54, если цилиндр является цилиндром двустороннего действия. Датчик 20 расположен на конце штока 52. На фиг. 3а представлен цилиндр 50 в положении, когда шток 52 максимально убран, а на фиг. 3b цилиндр 50 показан в положении, когда шток 52 максимально выдвинут.
Шток 52 является полым вдоль оси 53 и оптический тракт, обеспечивающий оптическую передачу сигнала или сигналов, расположен внутри штока 52, который защищает оптический тракт от окружающей среды, как и выше описанный кожух 25. Тело 51 содержит палец 56, проходящий вдоль оси 53 и проникающий во внутреннее пространство 57 штока 56. Приемник 35 и излучатель 37 расположены на конце пальца 56 так, чтобы быть оптически видимыми для излучателя 33 и приемника 38, принадлежащим датчику 20.
Подача энергии на датчик 20 может осуществляться также, как и в руке 10 с помощью излучателя 40, прикрепленного к штоку 56 и фотоэлектрического преобразователя 41, прикрепленного к датчику 20, с использованием режима свободного распространения между излучателем 40 и фотоэлектрическим преобразователем 41.
Альтернативно можно подавать питание на датчик 20 с помощью индукции, когда шток 52 находится в одном из крайних положений, например, в положении, показанном на фиг. 3а. Для этого палец 56 содержит обмотку 60 возбуждения, а датчик 20 содержит обмотку 61 якоря. В убранном положении штока 52 (фиг. 3а), обмотки 60 и 61 расположены в непосредственной близости так, чтобы иметь возможность обмениваться достаточным количеством энергии для питания датчика 20. Можно считать, что передача энергии между двумя обмотками 60 и 61 происходит в режиме свободного распространения. Это распространение происходит без ферромагнитного направляющего элемента между двумя обмотками 60, 61. Существует возможность установить ферромагнитный направляющий элемент в каждой обмотке 60, 61, но не между ними.
На обмотку 60 возбуждения подается высокий переменный ток, например, с частотой порядка 20-100 кГц. Этот ток генерирует другой ток в обмотке 61 якоря. Модуль 42 источника питания датчика 20 принимает этот наведенный ток для адаптации транспортируемой им энергии для питания разных компонентов датчика 20. Для обеспечения работы датчика 20, когда шток 52 находится выдвинутом положении, модуль 42 источника питания имеется средство для временного хранения энергии, например, аккумулятор или конденсатор.
Можно также расположить обмотки 60 и 61 так, чтобы они обменивались достаточным количеством энергии, когда шток 52 выдвинут из цилиндра, в положении, показанном на фиг. 3b. Выбор положения цилиндра 50, в котором обмотки 60, 61 находятся ближе всего друг к другу осуществляется как функция использования цилиндра и, в частности, как наиболее общее положение штока 52.
| название | год | авторы | номер документа |
|---|---|---|---|
| Навигационный буй с комплексной энергоустановкой | 2018 |
|
RU2672830C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2019 |
|
RU2698097C1 |
| ЭЛЕКТРОННАЯ ПИПЕТКА С ДИСПЛЕЕМ И МАНИПУЛЯТОРОМ ДЛЯ УПРАВЛЕНИЯ ЗАБОРОМ И РАСПРЕДЕЛЕНИЕМ ЖИДКОСТИ | 2004 |
|
RU2340397C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ (ВАРИАНТЫ) | 2006 |
|
RU2332639C2 |
| УСТРОЙСТВО КОНТРОЛЯ ВОЗНИКНОВЕНИЯ ПЕРЕМЕЩЕНИЯ ЧАСТЕЙ КОНСТРУКЦИЙ СООРУЖЕНИЯ | 2013 |
|
RU2609746C2 |
| НАВИГАЦИОННЫЙ БУЙ С КОМПЛЕКСНОЙ ЭНЕРГОУСТАНОВКОЙ | 2016 |
|
RU2617607C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ ПРЕДРАЗРУШЕНИЯ КОНСТРУКЦИЙ | 2010 |
|
RU2462698C2 |
| ОПТИЧЕСКИЙ МИНИСТИК | 2015 |
|
RU2594992C2 |
| СОЛНЕЧНАЯ КОСМИЧЕСКАЯ ЭЛЕКТРОСТАНЦИЯ И АВТОНОМНАЯ ФОТОИЗЛУЧАЮЩАЯ ПАНЕЛЬ | 2012 |
|
RU2492124C1 |
| АВТОНОМНАЯ МИКРОЭЛЕКТРОСТАНЦИЯ УЛИЧНОГО ФОНАРЯ | 2013 |
|
RU2528626C2 |
Изобретение относится к устройству, имеющему несколько элементов, которые могут перемещаться относительно друг друга. Заявленный манипулятор содержит фиксированный элемент, подвижный элемент, датчик для определения наличия движения подвижных элементов, прикрепленный к подвижному элементу, и канал связи, позволяющий передавать информацию между датчиком и фиксированным элементом. При этом указанный датчик генерирует первичный сигнал, представляющий наличие движения подвижных элементов. Манипулятор дополнительно содержит преобразователь первичного сигнала в световой сигнал, при этом преобразователь прикреплен к подвижному элементу. Канал связи является оптическим трактом, световой сигнал свободно распространяется между фиксированным элементом и подвижным элементом по оптическому тракту, причем датчик содержит модуль (42) источника питания, принимающий энергию от фиксированного элемента без контакта. Технический результат - разработка манипулятора, имеющего один датчик, в котором беспроводное соединение работает как для передачи информации, так и для получения питания. 7 з.п. ф-лы, 3 ил.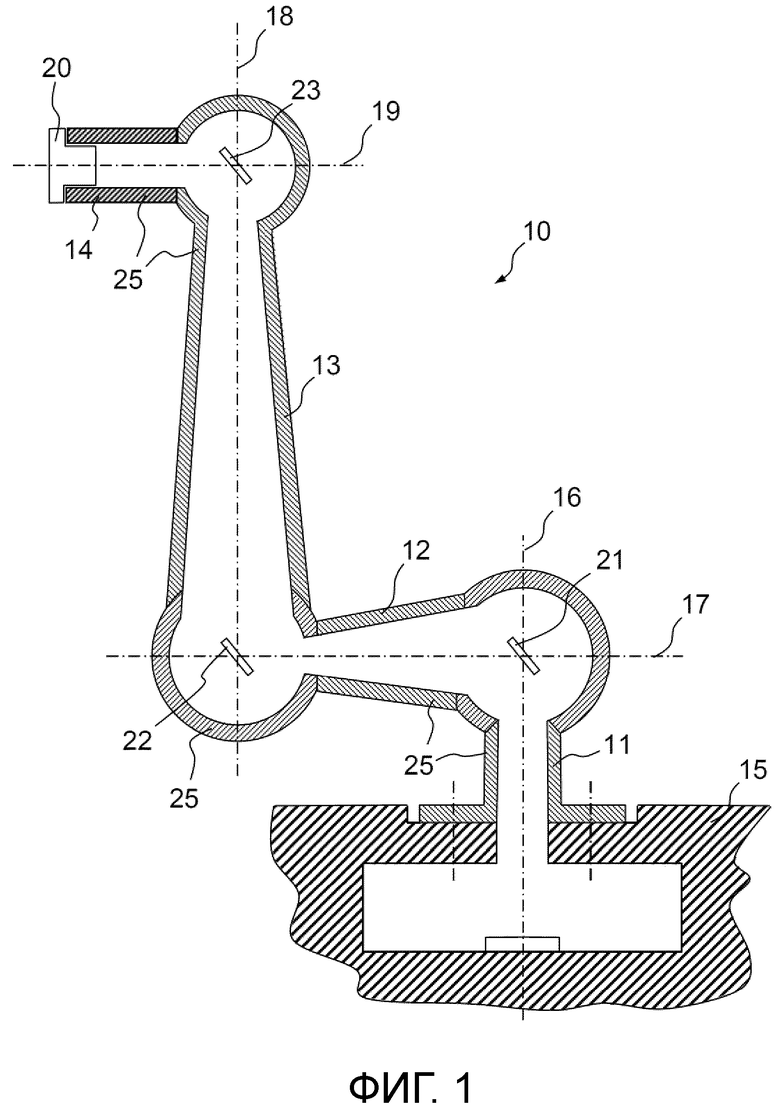
1. Манипулятор, содержащий фиксированный элемент (15, 51), подвижный элемент (14, 52), датчик (20) для определения наличия движения подвижных элементов, прикрепленный к подвижному элементу (14, 52), и канал связи, позволяющий передавать информацию между датчиком (20) и фиксированным элементом (15, 51), при этом датчик (20) генерирует первичный сигнал, представляющий наличие движения подвижных элементов, отличающийся тем, что манипулятор (10, 50) дополнительно содержит преобразователь (32, 33) первичного сигнала в световой сигнал, при этом преобразователь (32, 33) прикреплен к подвижному элементу (14, 52), причем канал связи является оптическим трактом (16, 17, 18, 19, 53), световой сигнал свободно распространяется между фиксированным элементом (15, 51) и подвижным элементом (14, 52) по оптическому тракту (16, 17, 18 19 53), причем датчик (20) содержит модуль (42) источника питания, принимающий энергию от фиксированного элемента без контакта.
2. Манипулятор по п. 1, отличающийся тем, что оптический тракт (16, 17, 18, 19, 53) полностью расположен внутри непрозрачного кожуха манипулятора (10 50).
3. Манипулятор по одному из пп.1 или 2, отличающийся тем, что канал связи выполнен с возможностью обеспечения двусторонней передачи информации между датчиком (20) и фиксированным элементом (15, 51).
4. Манипулятор по одному из пп.1-3, отличающийся тем, что датчик (20) содержит фотоэлектрический преобразователь (41), связанный с модулем (42) источника питания, причем манипулятор
содержит излучатель (40) света, закрепленный на фиксированном элементе (15, 51) и расположенный так, чтобы излучать свет в сторону фотоэлектрического преобразователя (41) в режиме свободного распространения.
5. Манипулятор по п. 4, отличающийся тем, что передача электрической энергии между излучателем (40) света и фотоэлектрическим преобразователем (41) осуществляется по оптическому тракту (16, 17, 18, 19 53).
6. Манипулятор по одному из пп.1-3, отличающийся тем, что датчик (20) содержит обмотку (61) якоря, связанную с модулем (42) источника питания, причем манипулятор содержит обмотку (60) возбуждения, закрепленную на фиксированном элементе (15, 51), при этом в конкретном положении фиксированного элемента (15, 51) и подвижного элемента (14, 52) обмотки якоря и возбуждения (60, 61) находятся достаточно близко друг от друга для обмена достаточным количеством энергии для питания датчика (20).
7. Манипулятор по одному из предшествующих пунктов, отличающийся тем, что содержит цилиндр (50), причем фиксированный элемент образует тело (51) цилиндра, тем, что подвижный элемент образует шток (52) цилиндра (50), при этом оптический тракт (53) расположен в штоке (52) цилиндра (50).
8. Манипулятор по одному из пп. 6 или 7, отличающийся тем, что конкретное положение является одним из крайних положений цилиндра (50).
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 2008221825 A1, 11.09.2008 | |||
| US 5119679 A, 09.06.1992 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

