Изобретение относится к средствам магнитных измерений и предназначено для аэрогеофизических поисков и разведки полезных ископаемых, а также техногенных объектов.
Известен феррозондовый аэромагнитометр, содержащий первый и второй феррозонды (ФЗ) системы ориентации и измерительный ФЗ с усилительно-преобразовательными схемами, двухосный карданов подвес (КП) с установленными на его внутренней площадке взаимно-ортогональными упомянутыми ФЗ, исполнительные механизмы вращения внутренней площадки и наружной рамы КП, цепи управления которых соединены с выходами усилительно-преобразовательных схем первого и второго ФЗ соответственно, а также вспомогательные компонентные магнитометры и компенсатор магнитных помех, входы которого соединены с выходами вспомогательных компонентных магнитометров.
Недостаток этого аэромагнитометра состоит в невысокой точности, надежности и значительных габаритах. Эти недостатки обусловлены тем, что в экваториальных широтах ось вращения наружной рамы карданова подвеса может быть расположена под малым углом к ВМИ. При этом даже небольшие угловые колебания носителя приводят к вращению наружной рамы на большие углы, вплоть до непрерывного вращения. Точность системы ориентации оказывается неудовлетворительной.
Наиболее близким известным техническим решением, принятым в качестве прототипа, является аэромагнитометр, содержащий первый и второй ФЗ системы ориентации и измерительный ФЗ с усилительно-преобразовательными схемами, трехосный КП с установленными на его внутренней площадке взаимно-ортогональными упомянутыми ФЗ, исполнительные механизмы вращения внутренней площадки и средней рамы КП, цепи управления которых соединены с выходами усилительно-преобразовательных схем первого и второго ФЗ соответственно, а также исполнительный механизм вращения наружной рамы КП, вспомогательные компонентные магнитометры и компенсатор помех, входы которого соединены с выходами вспомогательных компонентных магнитометров.
Недостатки прототипа состоят в его невысокой точности.
Цель изобретения - повышение точности.
Указанная цель достигается тем, что в схему феррозондового аэромагнитометра, содержащего первый и второй феррозонды системы ориентации и измерительный феррозонд, подключенные к соответствующим усилительно-преобразовательным схемам, трехосный карданов подвес, на внутренней площадке которого установлены взаимно ортогонально первый, второй и измерительный феррозонды, исполнительные механизмы вращения внутренней площадки и средней рамы карданова подвеса цепи, управления которых соединены с выходами усилительно-преобразовательных схем первого и второго феррозондов, соответственно, а также механизм вращения наружной рамы карданова подвеса, вспомогательные компонентные магнитометры и компенсатор магнитных помех, входы которого соединены с выходами вспомогательных компонентных магнитометров дополнительно введены датчик углового положения наружной рамы карданова подвеса и программно-управляемый блок, первый вход которого соединен с выходом датчика углового положения, второй и третий входы соединены с выходами соответствующих компонентных магнитометров, а выход соединен с цепью управления исполнительного механизма вращения наружной рамы карданова подвеса.
Благодаря введению программного управления углом поворота наружной рамы КП обеспечивается режим работы системы ориентации, при котором угол поворота средней рамы КП изменяется в небольших пределах и, независимо от угла магнитного наклонения и курса носителя, не выходит за пределы ±90о. Отпадает необходимость использования коллектора со скользящими контактами.
Феррозонды соединяются с усилительно-преобразовательными схемами посредством сплошных гибких проводов. Исключаются погрешности, обусловленные колебаниями переходного сопротивления скользящих контактов коллектора, а также погрешности, возникающие при приближении измерительного ФЗ к электропроводному корпусу коллектора. Исключаются нарушения контактов в измерительных цепях под воздействием вибраций, ударов и коррозии. Повышается надежность. Отсутствие коллектора на оси средней рамы обеспечивает сокращение габаритов и массы КП, благодаря чему облегчается размещение аэромагнитометра в обтекателях или на выдвижных штатах.
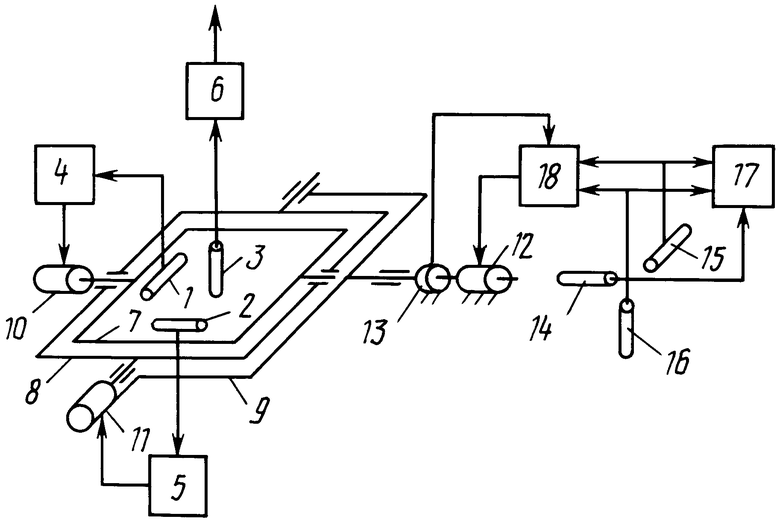
На чертеже представлена функциональная схема аэромагнитометра.
Заявляемый феррозондовый магнитометр содержит первый 1 и второй 2 ФЗ системы ориентации, 3 - измерительный ФЗ усилительно-преобразовательные схемы 4, 5, 6, внутреннюю площадку КП 7, среднюю раму КП 8, наружную раму КП 9, исполнительные механизмы вращения внутренней площадки и средней рамы КП 10, 11 исполнительный механизм вращения наружной рамы КП 12, датчик углового положения наружной рамы КП 13, вспомогательные компонентные магнитометры 14, 15, 16, компенсатор 17 магнитных помех и программно-управляемый блок 18.
Первый 1 и второй 2 ФЗ системы ориентации и измерительный феррозонд 3 соединены с усилительно-преобразовательными схемами 4, 5 и 6 соответственно и установлены на внутренней площадке КП 7 таким образом, что их измерительные оси взаимно ортогональны.
ФЗ 3 ортогональна плоскости внутренней площадки КП, а ФЗ 1 ортогонален оси вращения внутренней площадки КП. На средней раме КП 8 и на наружной раме КП 9 расположены исполнительные механизмы 10 и 11 вращения внутренней площадки 7 и средней рамы 8 КП соответственно. Управляющие входы исполнительных механизмов 10 и 11 соединены с выходами усилительно-преобразовательных схем 4 и 5 соответственно.
Наружная рама КП 9 связана с исполнительным механизмом вращения наружной рамы 12. На ее оси расположен датчик углового положения наружной рамы 13. Вспомогательные компонентные магнитометры 14, 15, 16 установлены неподвижно и ориентированы таким образом, что измерительная ось компонентного магнитометра 14 параллельна оси наружной рамы КП и направлена в сторону движения, а измерительные оси магнитометров 15 и 16 направлены соответственно в сторону правого борта и вниз.
Первый вход программно-управляемого блока 18 соединен с выходом датчика углового положения наружной рамы 13, второй и третий входы соединены с выходами вспомогательных компонентных магнитометров 15 и 16 соответственно, а выход программно-управляемого блока 18 соединен с цепью управления исполнительного механизма вращения наружной рамы 12.
Аэромагнитометр работает следующим образом. На выходах феррозондовых аэромагнитометров 1 и 2 формируются электрические сигналы в виде постоянного напряжения, пропорциональные проекциям вектора магнитной индукции на направления их измерительных осей. Эти сигналы с выходов усилительно-преобразовательных схем 4 и 5 поступают в цепи управления исполнительных механизмов вращения 10 и 11 соответственно. Исполнительные механизмы вращают внутреннюю площадку 7 и среднюю раму 8 карданова подвеса до тех пор, пока измерительные оси феррозондов ориентируются ортогонально вектору магнитной индукции. Сигналы на выходах усилительно-преобразовательных схем 4 и 5 станут равны нулю и вращение прекратится. При этом измерительный феррозонд 3 будет ориентирован по направлению ВМИ и на выходе усилительно-преобразовательной схемы 6, являющейся выходом аэромагнитометра, сформируется электрический сигнал в виде постоянного напряжения, пропорционального значению модуля вектора магнитной индукции суммы измеряемого магнитного поля Земли и магнитного поля носителя.
Вспомогательные компонентные магнитометры 14, 15 и 16 служат для измерения КМИ в связанной с носителем системе координат ОХУZ. Сигналы вспомогательных компонентных магнитометров в виде постоянных напряжений, пропорциональных значениям КМИ Вх, Ву и Вz поступают на входы компенсатора магнитных помех 17. В состав компенсатора магнитных помех входят блок распределительных устройств и компенсационные катушки, с помощью которых в объеме, занимаемом аэромагнитометром создаются магнитные поля, равные магнитному полю носителя по величине и противоположные ему по направлению. В результате чего из суммы магнитного поля носителя и земли исключается поле носителя и на выходе аэромагнитометра (блок 6) формируется сигнал, пропорциональный значению модуля вектора магнитного поля Земли.
Одновременно на выходе датчика углового положения наружной рамы 13, формируется электрический сигнал в виде постоянного напряжения, пропорционального углу поворота наружной рамы КП 9 относительно исходного горизонтального положения. На второй и третий входы программно-управляемого блока 18 поступают сигналы в виде постоянных напряжений, пропорциональные значениям КМИ Вy и Вz.
Программно-управляемый блок 18 выполнен в виде микроЭВМ с преобразователями напряжения в коды на ее входах и преобразователям кода в напряжение на ее выходе. Сигналы, представляющие собой напряжения, пропорциональные углу поворота наружной рамы μ, а также значениям КМИ Ву и Вz, поступившие на входы блока 18 преобразуются в соответствующие их значениям коды и поступают на входы микро-ЭВМ. ЭВМ, в соответствии с программой, записанной в ее памяти, выполняет вычисления в соответствии с зависимостью
Δμ=μ-arctg  -
- 
 (1)
(1)
и сигнал после преобразования кода в постоянное напряжение поступает на управляющий вход исполнительного механизма вращения наружной рамы 12. Наружная рама вращается до тех пор, пока угол поворота наружной рамы станет равен μ= arctg  -
- 
 , при этом сигнал Δ μ станет равен нулю и вращение прекратится. Плоскость наружной рамы КП при этом будет ортогональна вектору магнитной индукции, а внутренняя площадка КП 7 будет находиться в одной плоскости со средней рамой КП 8. Угол μ будет зависеть от магнитного курса носителя К и магнитного наклонения J вектора магнитного поля Земли
, при этом сигнал Δ μ станет равен нулю и вращение прекратится. Плоскость наружной рамы КП при этом будет ортогональна вектору магнитной индукции, а внутренняя площадка КП 7 будет находиться в одной плоскости со средней рамой КП 8. Угол μ будет зависеть от магнитного курса носителя К и магнитного наклонения J вектора магнитного поля Земли
μ=arctg  sinK
sinK (2)
(2)
Угол поворота наружной рамы КП имеет зависимость от магнитного курса и магнитного наклонения. Наружная рама разворачивается при разворотах носителя по курсу, причем значения углов μ не выходят за пределы ± 90о.
Автоматическое регулирование угла μ существенно отражается на работе ориентирующей системы. Угол поворота ν средней рамы КП может быть представлен зависимостью
ν=arctg  (3)
(3)
С учетом соотношения (2), определяющего зависимость угла от магнитного курса и магнитного наклонения, выражение для угла поворота средней рамы КП приобретает вид:
ν=arctg 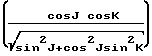 (4).
(4).
Имеется зависимость угла ν от курса К при различных углах магнитного наклонения. Зависимость ν от курса на экваторе (sin J=0) можно прокомментировать следующим образом. Согласно зависимости (3) на экваторе
ν=arctg  (5).
(5).
При смене знака sin K с "+" на "-" значения sin μ меняется с 1 на -1 и зависимость (5) может быть представлена в виде:
ν=arctg 
Как следует из проведенного анализа, при любых значениях магнитного курса и магнитного наклонения угол поворота средней рамы КП не выходит за пределы ± 90оС.
Закручивание проводов, соединяющих феррозонды 1, 2, 3 с усилительно-преобразовательными схемами 4, 5 и 6, не происходит и при работе ориентирующей системы электрическая связь не нарушается.
Благодаря тому, что в предлагаемом аэромагнитометре отсутствует коллектор со скользящими контактами повышается точность измерений, существенно снижается вероятность нарушения связи феррозондов с усилительно-преобразовательными схемами и повышается надежность аэромагнитометра. Исключаются погрешности взаимодействия измерительного феррозонда с коллектором. Отсутствие коллектора позволяет уменьшить размеры КП. Дополнительное преимущество достигается благодаря тому, что ориентирующая система работает в более благоприятном режиме. Выполняется условие оптимальности кинематической схемы, согласно которому измерительный феррозонд должен быть расположен ортогонально оси вращения средней рамы КП.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| Устройство для измерения вектора магнитной индукции | 1977 |
|
SU687424A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
| СПОСОБ РАЗДЕЛЕНИЯ МАГНИТНЫХ ПОМЕХ НОСИТЕЛЯ МАГНИТОМЕТРА | 1991 |
|
RU2047873C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1998 |
|
RU2153682C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
Использование: в геофизике в средствах магнитных измерений для аэрогеофизических поисков и разведки полезных ископаемых, поиска затонувших судов и других объектов техногенного происхождения. Сущность изобретения: два феррозонда ориентирующей системы и измерительный феррозонд расположены на внутренней площади трехосного карданова подвеса с исполнительными механизмами вращения и соединены с усилительно-преобразовательными схемами. Исполнительный механизм вращения наружной рамы соединен с выходом программно-управляемого блока, первый вход которого соединен с выходом датчика углового положения наружной рамы, а два других входа соединены с выходами вспомогательных компонентных магнитометров компенсатора магнитных помех. 1 ил.
ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР, содержащий первый и второй феррозонды системы ориентации и измерительный феррозонд, подключенные к соответствующим усилительно-преобразовательным схемам, трехосный карданов подвес, на внутренней площадке которого установлены взаимно ортогонально первый, второй и измерительный феррозонды, исполнительные механизмы вращения внутренней площадки и средней рамы карданова подвеса, цепи управления которых соединены с выходами усилительно-преобразовательных схем первого и второго феррозондов соответственно, а также механизм вращения наружной рамы карданова подвеса, вспомогательные компонентные магнитометры и компенсатор магнитных помех, входы которого соединены с выходами вспомогательных компонентных магнитометров, отличающийся тем, что, с целью повышения точности, он дополнительно содержит датчик углового положения наружной рамы карданова подвеса и программно-управляемый блок, первый вход которого соединен с выходом датчика углового положения, второй и третий входы - с выходами соответствующих компонентных магнитометров, а выход - с цепью управления исполнительного механизма вращения наружной рамы карданова подвеса.
| Тараев А.И., канторович В.Л | |||
| "Особенности работы ориентирующей системы аэромагнитометра" в сб | |||
| Геофизическая аппаратура | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Пишущая машина | 1922 |
|
SU37A1 |
