Изобретение относится к области гидроакустики и предназначено для определения дистанции до шумящего в море объекта.
Известны способы [1, 2, 3] оценки дистанции до шумящего в море объекта, использующие факт частотно-зависимого затухания сигнала при его распространении в морской среде. Способ [1] основан на использовании двух широкополосных частотных диапазонов, способ [2] основан на использовании совокупности узкополосных частотных диапазонов. Способ [3] основан на использовании совокупности узкополосных частотных диапазонов и позволяет компенсировать априорное незнание показателя степенной зависимости от частоты спектральной плотности мощности сигнала в точке излучения.
Недостатком этих способов является отсутствие учета аномалии распространения, вызванной явлением рефракции сигнала в морской среде. В связи с этим погрешность оценки дистанции этими способами непредсказуема и может быть большой.
Наиболее близким аналогом по решаемым задачам и используемым физическим закономерностям к предлагаемому изобретению является способ совместной оценки дистанции до шумящего в море объекта и его шумности [4], который принят за прототип.
В способе-прототипе выполняются следующие операции:
прием шумового сигнала объекта,
частотно-временная обработка сигнала с формированием не менее трех частотных диапазонов и определением мощности принятого сигнала в каждом из сформированных частотных диапазонов,
прогнозный расчет в сформированных частотных диапазонах акустического поля сигнала, содержащего прогнозные мощности сигнала для набора точек по дистанции,
расчет и формирование функции двумерной зависимости коэффициента корреляции от аргументов прогнозная шумность объекта и прогнозная дистанция до объекта между мощностью принятого сигнала и прогнозной мощностью сигнала,
определение дистанции до объекта и шумности объекта как аргументов максимума функции коэффициента корреляции.
Указанный способ обладает низкой помехоустойчивостью определения дистанции до объекта [5], которая выражается в пологом максимуме функции коэффициента корреляции по оси дистанций и наличии дополнительных локальных максимумов, близких по значению к основному. В условиях зональной структуры поля локальные максимумы расположены в разных зонах акустической освещенности, разнесенных на 50 км и более [6]. Это может приводить к неоднозначности оценки дистанции или даже к выбору локального максимума вместо основного, то есть к смещению оценки дистанции на более чем 50 км.
Задачей заявляемого способа является увеличение точности оценки дистанции до объекта путем привлечения дополнительной информации, доступной при шумопеленговании.
Для решения поставленной задачи в способ оценки дистанции до шумящего в море объекта включающий прием шумового сигнала объекта, частотно-временную обработку сигнала с формированием не менее трех частотных диапазонов и определением мощности принятого сигнала в каждом из сформированных частотных диапазонов, прогнозный расчет в сформированных частотных диапазонах акустического поля сигнала, содержащего прогнозные мощности сигнала для набора точек по дистанции, расчет и формирование функции коэффициента корреляции в зависимости от дистанции между мощностью принятого сигнала и прогнозной мощностью сигнала, определение основного максимума функции коэффициента корреляции, определение дистанции до объекта
введены новые признаки, а именно:
при приеме шумового сигнала объекта осуществляют автоматическое сопровождение сигнала по углу,
последовательно измеряют не менее двух направлений Р1, Р2 на объект через заданный интервал времени Δt,
дополнительно определяют несколько локальных максимумов функции коэффициента корреляции, значения которых наиболее близки к основному,
формируют гипотезы о дистанции D1, D2, … Di как аргументы основного D1 и наиболее близких к основному D2, … Di максимумов функции коэффициента корреляции,
для каждой из гипотез о дистанции определяют предполагаемую тангенциальную составляющую скорости объекта как 
в качестве оценки дистанции до объекта выбирают ту гипотезу о дистанции, для которой значение тангенциальной составляющей скорости не превышает максимально возможной скорости движения реального объекта,
а если таких гипотез несколько, то продолжают автоматическое сопровождение сигнала по углу и частотно-временную обработку сигнала до тех пор, пока не будет получено одно значение тангенциальной составляющей скорости цели, которое не превышает максимально возможной скорости движения объекта.
Техническим результатом изобретения является исключение ошибки смещения при определении дистанции до объекта в условиях зональной структуры акустического поля.
Покажем возможность достижения указанного технического результата предложенным способом.
Рассмотрим треугольник, вершинами которого являются положение приемника сигнала, положение объекта в первый момент времени и положение объекта во второй момент времени, отделенный от первого интервалом Δt. В этом треугольнике, согласно предлагаемому способу, измеренным является угол при вершине, в которой находится приемник сигнала. Это угол равен разности между направлениями на объект в первый и второй моменты времени |Р1-Р2|.
Если предположить, что дистанция до объекта D известна, то есть известны стороны треугольника, прилегающие к вершине в которой находится приемник сигнала, то, используя теорему косинусов, можно определить третью сторону треугольника, которая есть расстояние, пройденное объектом между двумя его положениями в первый и второй момента времени. Это расстояние R определится из соотношения:
R2=2D2(1-cos|P1-Р2|)
Тогда, зная интервал времени Δt между двумя положениями объекта, можно определить тангенциальную составляющую его скорости:
Видно, что вычисленная скорость V объекта прямо пропорциональна дистанции D до объекта. То есть, если дистанция будет определена со смещением в N раз, то и вычисленная скорость объекта будет определена со смещением в N раз. Однако, диапазон значений скорости объекта, в отличие от значений дистанции до объекта, ограничен физическими законами движения объекта в море. Например, скорости движения надводных кораблей не превышают 30-35 узлов [7].
Тогда, если для дистанции до объекта известны несколько гипотез, разнесенные в N раз, то вычисляя предполагаемую скорость объекта для каждой из гипотез, можно отбросить неверные гипотезы о дистанции на основании недостоверности предполагаемой скорости объекта.
Например, если разность между направлениями на объект, измеренными с интервалом 1 минута, составляет 2 градуса, то тангенциальная составляющая скорости объекта при гипотезе о дистанции 5 км - составит 5 уз, при гипотезе 50 км - 50 уз, а при гипотезе 100 км - 100 уз. Тогда гипотезы о дистанции 50 и 100 км могут быть отброшены в связи с тем, что морской объект не может двигаться со скоростями 50 или 100 уз.
Если разность между направлениями на объект, измеренными с интервалом 1 минута, составляет 1 градус, то тангенциальная составляющая скорости объекта при гипотезе о дистанции 5 км - составит 2,5 уз, при гипотезе 50 км - 25 уз, а при гипотезе 100 км - 50 уз. В этом случае недостоверной является только гипотеза о дистанции 100 км, поэтому она может быть отброшена. Гипотезы о дистанции 5 и 50 км должны быть проверены на последующих циклах обработки при продолжении автоматического сопровождения сигнала по углу и частотно-временной обработке сигнала.
Процедуры предлагаемого способа позволяют сформировать несколько гипотез о дистанции, для каждой из которых получить предполагаемую тангенциальную составляющую скорости цели, и отбросить гипотезы, для которых значение тангенциальной составляющей скорости превышает максимально возможную скорость движения реального объекта. Это позволит исключить ошибку смещения при определении дистанции до объекта в условиях зональной структуры акустического поля, когда локальные максимумы функции коэффициента корреляции расположены в разных зонах акустической освещенности, разнесенных на 50 км и более.
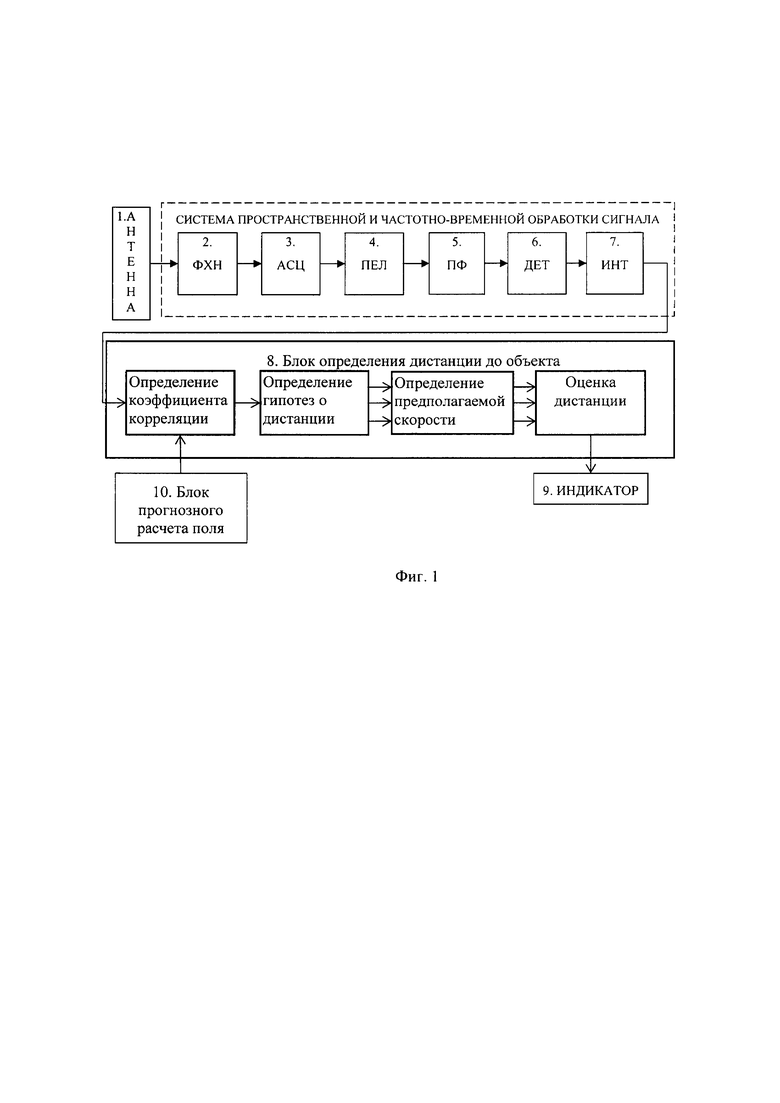
Сущность изобретения поясняется фигурой 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ оценки дистанции до шумящего в море объекта.
Предлагаемый способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1, в составе обобщенной структурной схемы гидроакустического канала шумопеленгования [8]. На структурной схеме последовательно соединены: антенна 1, блок 2 формирования характеристики направленности (ФХН), блок 3 автоматического сопровождения цели (АСЦ), блок 4 определения последовательных направлений на объект (ПЕЛ), блок 5 полосовой диапазонный фильтр (ПФ), блок 6 квадратичного детектирования (ДЕТ), блок 7 интегратор (ИНТ), блок 8 определения дистанции до объекта и блок 9 индикатор. Ко второму входу блока 8 подключен блок 10 прогнозного расчета поля. Антенна 1, блоки 2-7, составляющие в совокупности систему пространственной и частотно-временной обработки сигнала, блок 1 прогнозного расчета поля, а также индикатор 10 могут быть заимствованы из [8]. Процедуры блока 8 определения дистанции до объекта определяются предлагаемым способом и могут быть реализованы программным образом в составе ЦВК [9].
В динамике работы гидроакустического канала шумопеленгования предлагаемый способ реализуется следующим образом.
Шумовой сигнал объекта, принятый антенной 1, поступает в систему пространственной и частотно-временной обработки, содержащую совокупность блоков 2-7, на выходе которой формируются и поступают в блок 8 направления на объект Р1, Р2, … Pj, измеренные через интервал времени Δt, а также мощности принятого сигнала S(f) не менее чем в трех частотных диапазонах. Одновременно в блок 8 поступают мощности прогнозного сигнала W(d, f) для каждой прогнозной точки по дистанции, сформированные в результате прогнозного расчета акустического поля сигнала единичной мощности шумоизлучения с заданным законом спада спектра для набора прогнозных точек по дистанции, и хранящиеся в блоке прогнозного расчета поля 10. Из блока 8 полученные оценки дистанции до шумящего объекта поступают на индикатор 9 по мере выработки.
В блоке 8 производятся следующие операции:
- рассчитывают и формируют функцию коэффициента корреляции K(d) между мощностью принятого сигнала и прогнозной мощностью сигнала в зависимости от дистанции по известной формуле [9]:
где W(d, f) -прогнозная мощность сигнала для каждой прогнозной точки по дистанции d в сформированных частотных диапазонах f;
S(f) - мощность принятого сигнала в сформированных частотных диапазонах f;
n - количество частотных диапазонов (не менее трех).
- выбирают основной и несколько (например, два) локальных максимумов функции коэффициента корреляции, значения которых наиболее близки к основному.
- формируют гипотезы о дистанции D1, D2, … Di как аргументы выбранных максимумов функции коэффициента корреляции.
- для каждой из гипотез о дистанции определяют предполагаемую тангенциальную составляющую скорости объекта Vi как:
где Di - совокупность гипотез о дистанции;
P1, Р2 - направления на объект, измеренные через интервал времени Δt.
- выбирают в качестве оценки дистанции до объекта ту гипотезу о дистанции, для которой значение тангенциальной составляющей скорости не превышает максимально возможной скорости движения объекта, а если таких гипотез несколько, то продолжают пространственную и частотно-временную обработку сигнала.
Все изложенное позволяет считать задачу изобретения решенной: предложен способ оценки дистанции до шумящего в море объекта, который может быть использован в гидроакустических пассивных средствах обнаружения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1 Демиденко В.А. Частотный метод оценки расстояния и его эффективность при работе ГАС в пассивном режиме // Гидроакустика. 1993. Вып. 1. С. 3-16
2 Демиденко В.А., Перельмутер Ю.С. Спектральный метод оценки дистанции // Гидроакустика. 2006. Вып.6. С. 51-59
3 Голубев А.Г., Мисюченко И.Л. Патент РФ №2128848 от 10.04.1999. Способ измерения дальности до источника шумоизлучения. МПК G01S
4 Зеленкова И.Д., Волкова А.А., Никулин М.Н. Патент РФ №2548400 от 20.03.2015, приоритет от 30.01.2014. Способ совместной оценки дистанции до шумящего в море объекта и его шумности. МПК G01S 3/80
5 Волкова А.А., Консон А.Д. Потенциальные возможности двухчастотного метода оценки расстояния // Гидроакустика. 2009. Вып. 9. С. 43-51
6 Урик Р. Дж. Основы гидроакустики / Пер. с англ. Л.: Судостроение. 1978
7 Фолкнер К. Боевые корабли. Справочник / Пер. с англ. М.: Астрель. 2002
8 Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука. 2004
9 Бетелин В.Б., Капустин Г.И., Кокурин В.А., Корякин Ю.А., Лисе А.Р., Немытов А.И., Першин А.С., Рыжиков А.В., Челпанов А.В., Шалин С.А. Патент РФ №2207620 от 10.03.2003. Цифровой вычислительный комплекс для обработки сигналов в гидроакустических системах. МПК G06F 15/16, G01S 15/88.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2650830C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
Изобретение относится к области гидроакустики и предназначено для определения дистанции до шумящего в море объекта. Исследуют шумовой гидроакустический сигнал морского объекта, сопоставляя его с прогнозным сигналом, сформированным для совокупности предполагаемых дистанций до объекта, путем определения коэффициента корреляции. Анализируя основной и несколько локальных максимумов функции зависимости коэффициента корреляции от предполагаемой дистанции, формируют несколько гипотез о дистанции. Одновременно измеряют несколько последовательных направлений на объект. Для каждой гипотезы о дистанции определяют предполагаемую тангенциальную составляющую скорости объекта. В качестве оценки дистанции до объекта выбирают ту гипотезу о дистанции, для которой значение тангенциальной составляющей скорости не превышает максимально возможной скорости движения реального объекта. Техническим результатом изобретения является исключение ошибки смещения при определении дистанции до объекта в условиях зональной структуры акустического поля. 1 ил.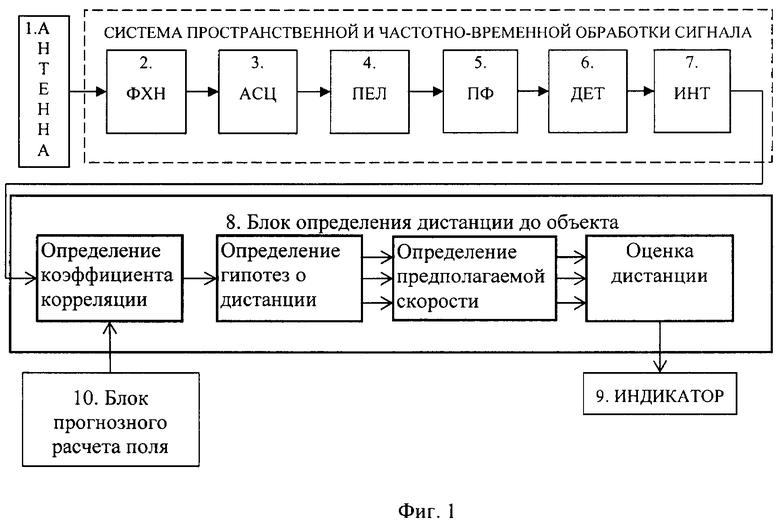
Способ оценки дистанции до шумящего в море объекта, включающий прием шумового сигнала объекта, частотно-временную обработку сигнала с формированием не менее трех частотных диапазонов и определением мощности принятого сигнала в каждом из сформированных частотных диапазонов, прогнозный расчет в сформированных частотных диапазонах акустического поля сигнала, содержащего прогнозные мощности сигнала для набора точек по дистанции, расчет и формирование функции коэффициента корреляции в зависимости от дистанции между мощностью принятого сигнала и прогнозной мощностью сигнала, определение основного максимума функции коэффициента корреляции, определение дистанции до объекта, отличающийся тем, что при приеме шумового сигнала объекта осуществляют автоматическое сопровождение сигнала по углу, последовательно измеряют не менее двух направлений Р1, Р2 на объект через заданный интервал времени Δt, дополнительно определяют несколько локальных максимумов функции коэффициента корреляции, значения которых наиболее близки к основному, формируют гипотезы о дистанции D1, D2, … Di как аргументы основного D1 и наиболее близких к основному D2, … Di максимумов функции коэффициента корреляции, для каждой из гипотез о дистанции определяют предполагаемую тангенциальную составляющую скорости объекта как 
 , в качестве оценки дистанции до объекта выбирают ту гипотезу о дистанции, для которой значение тангенциальной составляющей скорости не превышает максимально возможной скорости движения реального объекта, а если таких гипотез несколько, то продолжают автоматическое сопровождение сигнала по углу и частотно-временную обработку сигнала до тех пор, пока не будет получено одно значение тангенциальной составляющей скорости цели, которое не превышает максимально возможной скорости движения объекта.
, в качестве оценки дистанции до объекта выбирают ту гипотезу о дистанции, для которой значение тангенциальной составляющей скорости не превышает максимально возможной скорости движения реального объекта, а если таких гипотез несколько, то продолжают автоматическое сопровождение сигнала по углу и частотно-временную обработку сигнала до тех пор, пока не будет получено одно значение тангенциальной составляющей скорости цели, которое не превышает максимально возможной скорости движения объекта.
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| Способ определения параметров движения шумящего объекта | 2017 |
|
RU2692837C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ПО ИЗМЕРЕНИЯМ УГЛОВЫХ КООРДИНАТ | 2016 |
|
RU2608583C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2007 |
|
RU2353946C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| Способ обнаружения, классификации и определения координат и параметров движения морской шумящей цели | 2018 |
|
RU2692839C1 |
| CN 104793212 A, 22.07.2015 | |||
| CN 106526600 B, 20.09.2019. | |||

