Изобретение относится к области гидроакустики и предназначено для определения местоположения объектов, шумящих в море.
Известны способы [1, 2, 3] оценки дистанции до шумящего в море объекта, использующие факт частотно-зависимого затухания сигнала при его распространении в морской среде. Эти способы используют упрощенную модель спектра источника сигнала (монотонную зависимость от частоты) и грубую модель среды распространения сигнала (однородную безграничную среду), в результате чего оценка дистанции может обладать неконтролируемым смещением.
Наиболее близким аналогом по решаемым задачам и используемым физическим закономерностям к предлагаемому изобретению является способ определения местоположения шумящего в море объекта [4], который принят за прототип.
В способе-прототипе выполняются следующие операции:
измеряют параметры среды,
производят предварительный расчет гидроакустического поля для упрощенной модели сигнала с определением прогнозных значений отношения сигнал/помеха в широких полосах частот для набора дистанций,
принимают шумовой сигнал многоэлементной антенной,
производят частотно-временную обработку сигнала с определением оценок отношения сигнал/помеха в широких полосах частот приемного тракта,
производят расчет мер сходства между оценками отношений сигнал/помеха принятого сигнала и прогнозными значениями в каждой точке набора дистанций,
определяют дистанцию до шумящего объекта как точку из набора дистанций, в которой мера сходства максимальна.
Недостатком способа-прототипа является использование в гидроакустических расчетах упрощенной модели сигнала шумоизлучения, в рамках которой функция спектральной плотности мощности на частотах выше 0.5-1.0 кГц описывается аналитически монотонной зависимостью от частоты вида [5]:

где а - коэффициент пропорциональности, ƒ- частота, k - показатель степени частотной зависимости спектра сигнала.
Использование такой модели с фиксированными параметрами а и k позволяет, с одной стороны, оптимизировать гидроакустические расчеты путем проведения основных вычислений на одной (базовой) частоте и дальнейшего распространения результатов на другие частоты с помощью экстраполяции. С другой стороны, такая модель является очень грубым приближением к реальности, не отражающим ни особенности шумоизлучения объектов различных типов, ни особенности шумоизлучения при разных скоростях хода и (или) глубинах погружения объектов. В результате использования такой модели в способе оценки дистанции, использующем именно частотную зависимость затухания сигнала при его распространении в среде, возникает смещение оценки дистанции, значение которого нельзя контролировать. Кроме того, указанная модель определена только для частот выше 0.5-1.0 кГц и не распространяется на весь диапазон спектра сигнала, который может быть проанализирован при шумопеленговании. Это ограничивает возможности способа по оценке дистанции для объектов, спектр которых сосредоточен в более низком диапазоне частот или не соответствует упрощенной модели.
Задачей заявляемого способа является повышение точности оценки местоположения шумящих объектов, спектры которых плохо согласуются с упрощенной моделью сигнала шумоизлучения.
Для решения поставленной задачи в способ определения местоположения шумящего в море объекта, в котором измеряют параметры среды, производят предварительный расчет гидроакустического поля, для сигнала единичной шумности рассчитывают и сохраняют прогнозные значения отношений сигнал/помеха в широких полосах частот, принимают шумовой сигнал многоэлементной антенной, производят частотно-временную обработку, в результате которой измеряют отношения сигнал/помеха в широких полосах частот в горизонтальном направлении на объект, определяют меру сходства между оценками параметров принятого сигнала и прогнозными значениями параметров в каждой точке набора дистанций, определяют дистанцию до шумящего объекта как точку из набора дистанций, в которой мера сходства максимальна
введены новые признаки, а именно:
формируют  характеристик направленности (ХН) в вертикальной плоскости, для каждой из которых при проведении частотно-временной обработки принятого сигнала:
характеристик направленности (ХН) в вертикальной плоскости, для каждой из которых при проведении частотно-временной обработки принятого сигнала:
формируют  участков рабочего диапазона частот,
участков рабочего диапазона частот,
измеряют отношения сигнал/помеха  в каждом из участков рабочего диапазона частот в каждой ХН в вертикальной плоскости
в каждом из участков рабочего диапазона частот в каждой ХН в вертикальной плоскости  ,
,
измеряют коэффициенты  и
и  аппроксимации логарифма спектра сигнала линейной функцией
аппроксимации логарифма спектра сигнала линейной функцией  зависимости от частоты ƒ для тех же и ,
зависимости от частоты ƒ для тех же и ,
измеряют частоту  и амплитуду
и амплитуду  дискретных составляющих спектра сигнала в рабочем диапазоне частот от одной до
дискретных составляющих спектра сигнала в рабочем диапазоне частот от одной до  штук в каждой из ХН,
штук в каждой из ХН,
выделяют амплитудную огибающую сигнала в диапазоне вально-лопастных частот,
измеряют частоту  и амплитуду
и амплитуду  дискретных составляющих спектра амплитудной огибающей для тех же и ,
дискретных составляющих спектра амплитудной огибающей для тех же и ,
по результатам обработки формируют многомерный вектор измеренных параметров Y, элементами которого являются  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,
предварительно формируют совокупность типов объектов, для каждого из которых заданы уровень приведенной шумности и спектральная плотность мощности,
для каждого типа объекта  производят расчет гидроакустического поля в каждом узле сетки дистанция × глубина
производят расчет гидроакустического поля в каждом узле сетки дистанция × глубина  ,
,
по результатам расчета получают совокупность многомерных векторов прогнозных параметров  с элементами
с элементами  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , для тех же , и ,
, для тех же , и ,
сравнивают прогнозные отношения сигнал/помеха  с порогом обнаружения,
с порогом обнаружения,
по результатам сравнения определяют зоны возможного обнаружения каждого объекта по дистанции и глубине,
выбирают из совокупности векторов прогнозных параметров  те, которые попали в зоны обнаружения, и формируют из них банк векторов прогнозных параметров
те, которые попали в зоны обнаружения, и формируют из них банк векторов прогнозных параметров  ,
,
при определении меры сходства используют вектор измеренных параметров Y и вектора прогнозных параметров , попавшие в банк,
при определении местоположения объекта совместно с оценкой дистанции определяют оценку глубины погружения объекта и его тип.
Техническим результатом изобретения является повышение точности определения местоположения шумящего объекта как по дистанции, так и по глубине погружения с одновременным определением типа наблюдаемого объекта, что особенно важно в целях классификации источника.
Покажем возможность достижения указанного технического результата предложенным способом.
Определение местоположения шумящего объекта основано на анализе сигнала, принятого антенной после распространения в среде от точки излучения к точке приема. Принятый сигнал сравнивают с прогнозными сигналами, полученными для модели системы источник-среда-приемник с переменной дистанцией между источником и приемником. В рамках такой модели спектральную плотность мощности шумового сигнала в точке приема можно записать в виде произведения четырех множителей [5]:

Первый множитель представляет собой модель спектра сигнала в точке излучения.
Второй множитель представляет собой модель частотно-зависимого затухания сигнала при его распространении в однородной безграничной среде на заданное расстояние в горизонтальной плоскости:

где  - частотно-зависимый коэффициент затухания,
- частотно-зависимый коэффициент затухания,  - дистанция до источника сигнала.
- дистанция до источника сигнала.
Третий множитель представляет собой аномалию распространения сигнала, связанную с рефракцией звука в слоисто-неоднородной среде, ограниченной поверхностью и дном, которая в рамках лучевой теории может быть описана выражением:

где  - фактор фокусировки луча
- фактор фокусировки луча  , приходящего из точки
, приходящего из точки  , в точку расположения носителя под углом
, в точку расположения носителя под углом  в вертикальной плоскости,
в вертикальной плоскости,  - дистанция до источника сигнала,
- дистанция до источника сигнала,  - глубина погружения источника сигнала,
- глубина погружения источника сигнала,  - коэффициент отражения от поверхности,
- коэффициент отражения от поверхности,  - коэффициент отражения от дна, - угол прихода луча в вертикальной плоскости.
- коэффициент отражения от дна, - угол прихода луча в вертикальной плоскости.
Второй и третий множители в совокупности определяют полную модель среды.
Четвертый множитель представляет собой модель приемного тракта, параметры которой известны точно, поэтому далее не рассматривается.
Рассмотрим первый множитель выражения (2) - модель спектра сигнала в точке излучения. Анализ доступных литературных источников [5, 6] показывает, что спектры шумоизлучения морских объектов различаются довольно сильно. Для анализа спектра даже в грубом приближении его разбивают на два диапазона по частоте. Спектр в диапазоне частот до 0.5-1.0 кГц считается наиболее неустойчивым, изрезанным и различным для разных объектов. Для этого участка характерен как сплошной фон сложной формы, так и отдельные дискретные составляющие (постоянные во времени превышения сплошного фона на отдельных частотах), уровень и положение максимумов которых определяются и конструкцией судна, и режимом движения (скоростью). В диапазоне частот выше 0.5-1.0 кГц спектр считается более стабильным и схожим для разных объектов. Именно для этого диапазона выработана упрощенная модель спектра шумоизлучения (1), общая для совокупности объектов. Однако и для этого диапазона наблюдаются отклонения от упрощенной модели. Общая тенденция для разных объектов такова: при более высоких скоростях хода уровень шума возрастает, и спектр сдвигается в область более низких частот. При этом спектр обогащается дискретными составляющими, некоторые из которых возрастают как по уровню, так и по частоте. Уменьшение глубины погружения при неизменной скорости оказывает такое же общее влияние на спектр шума, как и увеличение скорости при неизменной глубине. В общем случае зависимость спектральной плотности мощности от частоты не является монотонной. При этом форма сплошной части спектра и состав дискретных составляющих при фиксированной скорости на фиксированной глубине определяются типом объекта.
В связи с этим заявляемый способ, в котором в расчет гидроакустического поля в качестве модели спектра сигнала в точке излучения (множитель  ) закладывают совокупность именно спектральных плотностей мощности сигнала для различных типов объектов, позволяет более «тонко», чем в способе-прототипе, учесть затухание сигнала (множитель
) закладывают совокупность именно спектральных плотностей мощности сигнала для различных типов объектов, позволяет более «тонко», чем в способе-прототипе, учесть затухание сигнала (множитель  ) на каждом из частотных отсчетов спектра. Для создания полных моделей спектра используют совокупность параметров, позволяющих математически описать функцию спектральной плотности минимальными средствами. К таким параметрам могут относиться: уровень приведенной шумности, который характеризует абсолютное значение мощности сигнала на базовой частоте, параметры формы сплошной части спектра, характеризующие общий тренд спектра на различных участках полного диапазона частот шумопеленгования, параметры отдельных дискретных составляющих, которые содержат информацию о наличии/отсутствии устойчивых превышений над сплошной частью спектра и описываются уровнями и положениями максимумов на шкале частот, параметры амплитудной огибающей сигнала в вально-лопастном диапазоне частот, характеризующие возможную модуляцию сигнала по амплитуде, обусловленную конструкцией винта объекта. Возможно и альтернативное описание функции - в виде таблицы (графика) зависимости мощности сигнала от частоты с дискретным шагом. При этом дискретный шаг по частоте выбирается по критерию сохранения дискретных составляющих на фоне устойчивой формы сплошной части спектра. Выбор способа задания функции определяется реализацией программы расчета поля. Таким образом, использование в модели сигнала параметров спектра на частотах как ниже, так и выше 0.5-1.0 кГц и параметров амплитудной огибающей, не используемых в способе-прототипе, позволяет расширить анализируемый частотный диапазон, увеличив тем самым помехоустойчивость метода, что для методов оценивания приводит к увеличению точности оценки.
) на каждом из частотных отсчетов спектра. Для создания полных моделей спектра используют совокупность параметров, позволяющих математически описать функцию спектральной плотности минимальными средствами. К таким параметрам могут относиться: уровень приведенной шумности, который характеризует абсолютное значение мощности сигнала на базовой частоте, параметры формы сплошной части спектра, характеризующие общий тренд спектра на различных участках полного диапазона частот шумопеленгования, параметры отдельных дискретных составляющих, которые содержат информацию о наличии/отсутствии устойчивых превышений над сплошной частью спектра и описываются уровнями и положениями максимумов на шкале частот, параметры амплитудной огибающей сигнала в вально-лопастном диапазоне частот, характеризующие возможную модуляцию сигнала по амплитуде, обусловленную конструкцией винта объекта. Возможно и альтернативное описание функции - в виде таблицы (графика) зависимости мощности сигнала от частоты с дискретным шагом. При этом дискретный шаг по частоте выбирается по критерию сохранения дискретных составляющих на фоне устойчивой формы сплошной части спектра. Выбор способа задания функции определяется реализацией программы расчета поля. Таким образом, использование в модели сигнала параметров спектра на частотах как ниже, так и выше 0.5-1.0 кГц и параметров амплитудной огибающей, не используемых в способе-прототипе, позволяет расширить анализируемый частотный диапазон, увеличив тем самым помехоустойчивость метода, что для методов оценивания приводит к увеличению точности оценки.
Рассмотрим третий множитель выражения (2) - аномалию распространения сигнала. Именно этот множитель позволяет перейти от «грубой» к более «тонкой» модели среды. Фактор фокусировки, входящий в выражение для аномалии, не может быть записан аналитическим выражением, а вычисляется в дискретных точках сетки дистанция-глубина после расчета траектории звуковых лучей. При этом и фактор фокусировки, и коэффициенты отражения от поверхности и дна зависят от угла скольжения луча в вертикальной плоскости. Следовательно, для корректного учета аномалии распространения сигнала необходимо формировать как в приемном тракте, так и при расчете гидроакустического поля, совокупность характеристик направленности в вертикальной плоскости, для каждой из которых определять параметры сигнала. Это и предусмотрено в заявляемом способе.
По результатам расчета спектральной плотности мощности сигнала от каждого типа объекта в точке приема (по формуле 2) формируют совокупность многомерных векторов прогнозных параметров объектов для сетки дистанция-глубина. Здесь для получения отношений сигнал/помеха в качестве спектральной плотности мощности помехи может быть использована либо ее модель, известная из [6], либо гистограмма распределения помехи на участках диапазона частот, предварительно измеренная в точке приема. Далее заявляемый способ предусматривает операции определения зон возможного обнаружения каждого объекта по дистанции и глубине и формирования банка векторов прогнозных параметров объектов из тех векторов, которые попали в зоны обнаружения. Совокупность этих операций позволяет исключить из дальнейшего анализа вектора прогнозных параметров для тех объектов, которые не могут быть обнаружены в текущих гидрологических условиях, находясь в конкретных узлах сетки по дистанции и глубине. Это, во-первых, позволяет уменьшить объем дальнейших вычислений, и во-вторых, производит первичную настройку алгоритма на выбранные зоны по дистанции и глубине, уменьшая возможность многозначности решения. Тогда заявляемый способ позволяет, после определения совокупности мер сходства, совместно определить дистанцию до объекта, глубину погружения объекта и тип объекта в условиях слоисто-неоднородной модели среды.
Для определения мер сходства используют параметры, совокупность которых позволяет при сравнении принятого сигнала с прогнозными сигналами учесть и характерные особенности типа объекта, и затухание сигнала при распространении в среде, и помеховую ситуацию в районе наблюдения. Значения отношений сигнал/помеха в широких полосах частот служат одновременно показателями абсолютных значений мощности сигнала и показателями влияния помех. Показатели степени спада спектра на каждом из участков рабочего диапазона частот позволяют контролировать основной частотный тренд при затухании сигнала, то есть учесть немонотонный характер спектра. Выбор ширины частотных полос для определения отношений сигнал/помеха и показателей степени спада спектра производится по критерию стабильности формы спектра сигнала на частотном участке. Параметры дискретных составляющих, к которым относятся абсолютный уровень и положение на оси частот рабочего диапазона, служат показателями типа объекта, одновременно позволяя уточнять затухание сигнала в узких полосах частот. Параметры дискретных составляющих амплитудной огибающей сигнала в диапазоне вально-лопастных частот позволяют уточнять тип объекта (в том числе по скорости движения) и затухание сигнала в низком диапазоне частот. Заявляемый способ позволяет измерить всю совокупность указанных параметров в приемном тракте и использовать их при определении меры сходства, чем и достигается технический результат.
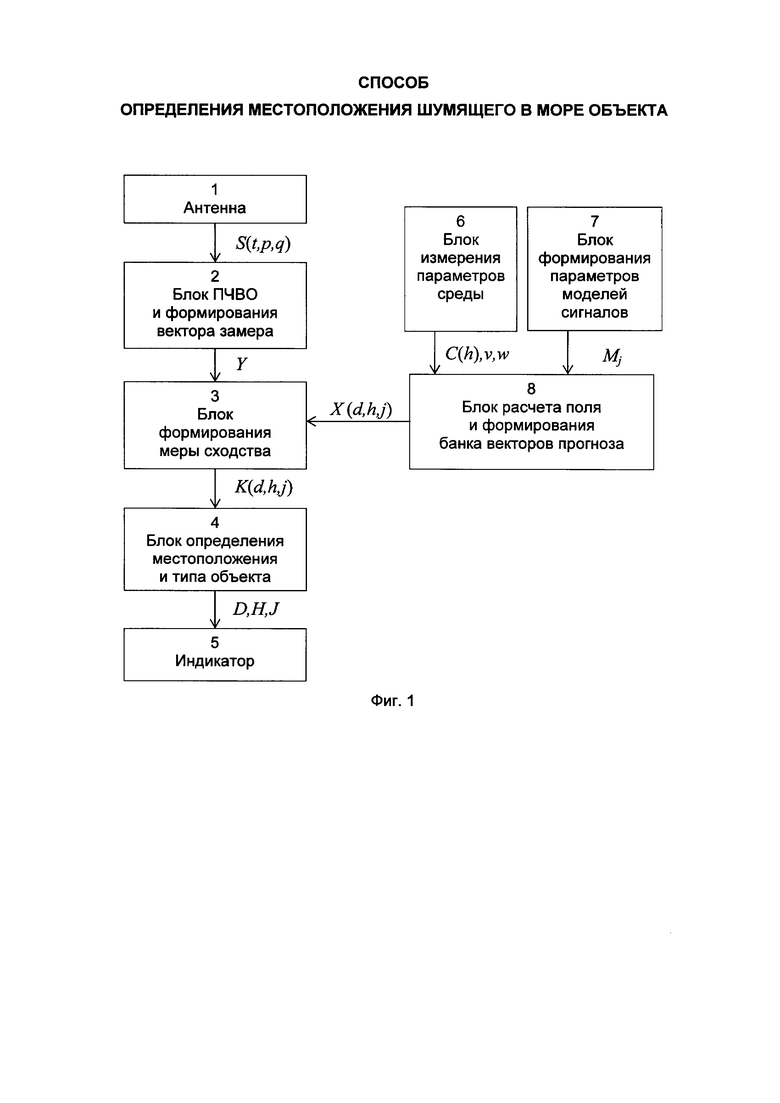
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего способ.
На фиг. 1 выход антенны 1 соединен с входом блока 2 пространственно-частотно-временной обработки (ПЧВО) и формирования вектора замера, выход блока пространственно-частотно-временной обработки и формирования вектора замера соединен с первым входом блока 3 формирования меры сходства, выход блока формирования меры сходства соединен с входом блока 4 определения местоположения и типа объекта, выход блока определения местоположения и типа объекта соединен с входом индикатора 5. Второй вход блока 3 соединен с выходом блока 8 расчета поля и формирования банка векторов прогноза, первый вход блока 8 соединен с выходом блока 6 измерения параметров среды, второй вход блока 8 соединен с выходом блока 7 формирования параметров моделей сигналов.
Реализацию способа целесообразно описать на примере работы устройства (фиг. 1).
В блоке 7 производится предварительное формирование совокупности типов объектов, определяемых моделями своих сигналов  , где
, где  - многомерный вектор параметров, совокупность которых позволяет описать функцию спектральной плотности мощности сигнала ,
- многомерный вектор параметров, совокупность которых позволяет описать функцию спектральной плотности мощности сигнала ,  - порядковый номер типа объекта. Возможный состав вектора параметров : уровень приведенной шумности, параметры формы сплошной части спектра, параметры отдельных дискретных составляющих, параметры амплитудной огибающей сигнала. В блоке 6 производится измерение параметров среды в точке наблюдения:
- порядковый номер типа объекта. Возможный состав вектора параметров : уровень приведенной шумности, параметры формы сплошной части спектра, параметры отдельных дискретных составляющих, параметры амплитудной огибающей сигнала. В блоке 6 производится измерение параметров среды в точке наблюдения:  - зависимость скорости звука от глубины,
- зависимость скорости звука от глубины,  - параметры поверхности,
- параметры поверхности,  - параметры дна. Сформированные параметры моделей сигналов и измеренные параметры среды поступают в блок 8, где производится расчет поля для каждого типа объекта по сетке дистанция × глубина, формирование зон возможного обнаружения каждого объекта и формирование банка векторов прогнозных параметров
- параметры дна. Сформированные параметры моделей сигналов и измеренные параметры среды поступают в блок 8, где производится расчет поля для каждого типа объекта по сетке дистанция × глубина, формирование зон возможного обнаружения каждого объекта и формирование банка векторов прогнозных параметров  , где
, где  - многомерный вектор прогнозных параметров для каждого типа объекта по сетке дистанция × глубина
- многомерный вектор прогнозных параметров для каждого типа объекта по сетке дистанция × глубина  .
.
В блоках 1-5 непосредственно реализуется определение местоположения шумящего объекта. Шумовой сигнал объекта  , где
, где  - время,
- время,  ,
,  - номера элементов антенны в горизонтальной и вертикальной плоскостях, принятый многоэлементной антенной 1 поступает в блок 2. В блоке 2 производится пространственно-частотно-временная обработка сигнала с формированием
- номера элементов антенны в горизонтальной и вертикальной плоскостях, принятый многоэлементной антенной 1 поступает в блок 2. В блоке 2 производится пространственно-частотно-временная обработка сигнала с формированием  характеристик направленности в вертикальной плоскости, для каждой из которых формируют участки рабочего диапазона частот, измеряют отношения сигнал/помеха и показатели степени спада спектра сигнала в каждом из участков, измеряют параметры дискретных составляющих спектра в рабочем диапазоне частот, выделяют амплитудную огибающую сигнала в диапазоне вально-лопастных частот, измеряют параметры дискретных составляющих спектра амплитудной огибающей сигнала. Здесь показатели степени спада спектра сигнала на участках диапазона частот могут быть получены в результате аппроксимации дискретных спектральных отсчетов экспоненциальной функцией методом наименьших квадратов [7]. При этом, использование логарифмического представления спектра сигнала позволяет прейти от экспоненциальной функции к линейной, и получить коэффициенты а и b аппроксимации спектра сигнала линейной функцией
характеристик направленности в вертикальной плоскости, для каждой из которых формируют участки рабочего диапазона частот, измеряют отношения сигнал/помеха и показатели степени спада спектра сигнала в каждом из участков, измеряют параметры дискретных составляющих спектра в рабочем диапазоне частот, выделяют амплитудную огибающую сигнала в диапазоне вально-лопастных частот, измеряют параметры дискретных составляющих спектра амплитудной огибающей сигнала. Здесь показатели степени спада спектра сигнала на участках диапазона частот могут быть получены в результате аппроксимации дискретных спектральных отсчетов экспоненциальной функцией методом наименьших квадратов [7]. При этом, использование логарифмического представления спектра сигнала позволяет прейти от экспоненциальной функции к линейной, и получить коэффициенты а и b аппроксимации спектра сигнала линейной функцией  в участках диапазона частот. Для выделения амплитудной огибающей сигнала осуществляют квадратичное детектирование и низкочастотную фильтрацию [8]. В качестве параметров дискретных составляющих принимают амплитуду превышения над сплошной частью спектра и положение на оси частот. Для обнаружения дискретных составляющих используют метод обнаружения аномальных выбросов [9]. В результате измерения указанных параметров сигнала, на выходе блока 2 формируется многомерный вектор измеренных параметров сигнала
в участках диапазона частот. Для выделения амплитудной огибающей сигнала осуществляют квадратичное детектирование и низкочастотную фильтрацию [8]. В качестве параметров дискретных составляющих принимают амплитуду превышения над сплошной частью спектра и положение на оси частот. Для обнаружения дискретных составляющих используют метод обнаружения аномальных выбросов [9]. В результате измерения указанных параметров сигнала, на выходе блока 2 формируется многомерный вектор измеренных параметров сигнала  , который поступает в блок 3.
, который поступает в блок 3.
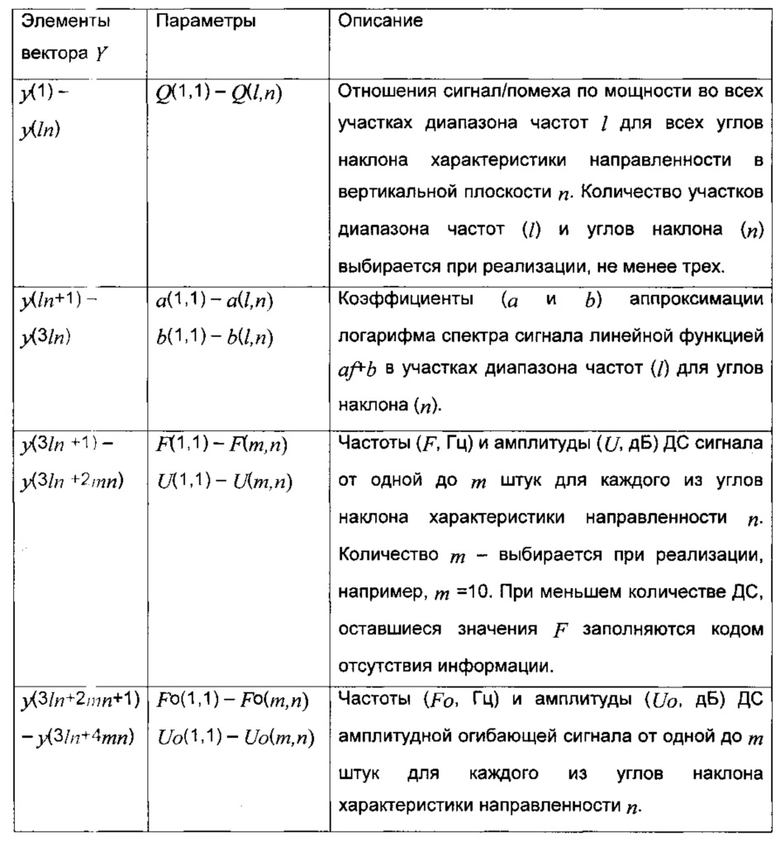
Состав вектора измеренных параметров у приведен в таблице:
Одновременно в блок 3 поступает банк векторов прогнозных параметров  , сформированный в блоке 8. Состав векторов идентичен составу вектора Y. В блоке 3 производится формирование меры сходства
, сформированный в блоке 8. Состав векторов идентичен составу вектора Y. В блоке 3 производится формирование меры сходства  между вектором измеренных параметров и векторами прогнозных параметров из банка для каждого типа объекта
между вектором измеренных параметров и векторами прогнозных параметров из банка для каждого типа объекта  в узлах сетки дистанция-глубина
в узлах сетки дистанция-глубина  ,
,  .
.
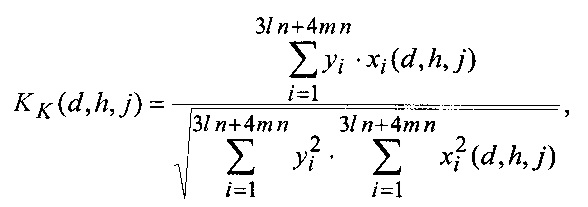
В качестве меры сходства  может использоваться любая из известных мер сходства, например, мера корреляции или мера расстояния, рассчитываемые по формулам [10]:
может использоваться любая из известных мер сходства, например, мера корреляции или мера расстояния, рассчитываемые по формулам [10]:
- мера корреляции (подобность Орсини)
- мера расстояния (Евклидово расстояние в многомерном пространстве)
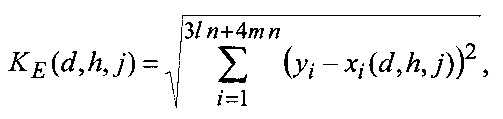
где  - элементы вектора измеренных параметров
- элементы вектора измеренных параметров  ,
,
 - элементы вектора прогнозных параметров
- элементы вектора прогнозных параметров  , определенного для расстояния до объекта
, определенного для расстояния до объекта  , глубины погружения объекта
, глубины погружения объекта  и типа объекта
и типа объекта  ,
,
 ,
,  ,
,  - количество участков диапазона частот, количество углов наклона характеристики направленности в вертикальной плоскости и количество ДС в массивах спектров (
- количество участков диапазона частот, количество углов наклона характеристики направленности в вертикальной плоскости и количество ДС в массивах спектров ( - общее количество элементов в каждом из векторов и векторе
- общее количество элементов в каждом из векторов и векторе  ). При =3, =3, =10, общее количество элементов многомерного вектора и каждого из векторов составляет 147 элементов.
). При =3, =3, =10, общее количество элементов многомерного вектора и каждого из векторов составляет 147 элементов.
Меры сходства, полученные для каждой точки трехмерного пространства , , , из блока 3 поступают в блок 4, где производится определение местоположения объекта (по дистанции  и глубине погружения
и глубине погружения  ) и типа объекта
) и типа объекта  на основании выбора точки, в которой мера сходства имеет экстремум (максимум для меры корреляции, минимум для меры расстояния). Полученные оценки дистанции , глубины и типа объекта поступают в блок 5 для индикации оператору.
на основании выбора точки, в которой мера сходства имеет экстремум (максимум для меры корреляции, минимум для меры расстояния). Полученные оценки дистанции , глубины и типа объекта поступают в блок 5 для индикации оператору.
Все изложенное позволяет считать задачу изобретения решенной. Технический результат, заключающийся в повышении точности определения местоположения шумящего объекта как по дистанции, так и по глубине погружения с одновременным определением типа наблюдаемого объекта, достигнут.
Источники информации
1. Голубев А.Г., Мисюченко И.Л. Патент РФ №2128848, МПК G01S, от 10.04.1999. Способ измерения дальности до источника шумоизлучения.
2. Демиденко В.А., Перельмутер Ю.С.Спектральный метод оценки дистанции // Гидроакустика. 2006. Вып. 6. С. 51-59.
3. Тимошенков В.Г. Патент РФ №2550576, МПК G01S, от 30.01.2014. Способ измерения дистанции до шумящего объекта.
4. Зеленкова И.Д., Волкова А.А., Никулин М.Н. Патент РФ №2548400, МПК G01S, от 30.01.2014. Способ совместной оценки дистанции до шумящего в море объекта и его шумности.
5. Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. Л.: Судостроение, 1981.
6. Урик Р.Дж. Основы гидроакустики. Пер. с англ. Л.: Судостроение, 1976.
7. Тейлор Дж. Введение в теорию ошибок. Пер. с англ. М.: Мир, 1985.
8. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. Пер. с англ. М.: Мир, 1978.
9. Анализ информации оператором-гидроакустиком / В.В. Деев, Ю.М. Забродин, А.П. Пахомов и др. - Л.: Судостроение. 1989.
10. Деза Е.И., Деза М.М. Энциклопедический словарь расстояний. Пер. с англ. М.: Наука, 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2650830C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2654365C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| Способ классификации морских объектов по уровню шума в источнике | 2021 |
|
RU2767001C1 |
| Способ оценки дистанции до шумящего в море объекта | 2019 |
|
RU2730100C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
Изобретение относится к области гидроакустики и предназначено для определения местоположения объектов, шумящих в море. Принимают шумовой сигнал многоэлементной антенной. Формируют n характеристик направленности в вертикальной плоскости. По результатам частотно-временной обработки принятого сигнала формируют многомерный вектор измеренных параметров сигнала. Предварительно формируют совокупность типов объектов, для каждого из которых определены уровень приведенной шумности и спектральная плотность мощности. Измеряют параметры среды в точке наблюдения. Для каждого типа объекта производят расчет гидроакустического поля для сетки дистанция-глубина и получают совокупность многомерных векторов прогнозных параметров, состав которых идентичен составу вектора измеренных параметров. Определяют зоны возможного обнаружения каждого типа объекта по дистанции и глубине и формируют банк из тех векторов прогнозных параметров, которые попали в зоны обнаружения. Определяют меру сходства между вектором измеренных параметров и векторами прогнозных параметров из банка. Совместно определяют дистанцию до шумящего объекта, глубину погружения объекта и тип объекта как точку сетки, в которой мера сходства максимальна. Техническим результатом изобретения является повышение точности определения местоположения шумящего объекта как по дистанции, так и по глубине погружения с одновременным определением типа наблюдаемого объекта, что особенно важно в целях классификации источника. 1 ил., 1 табл.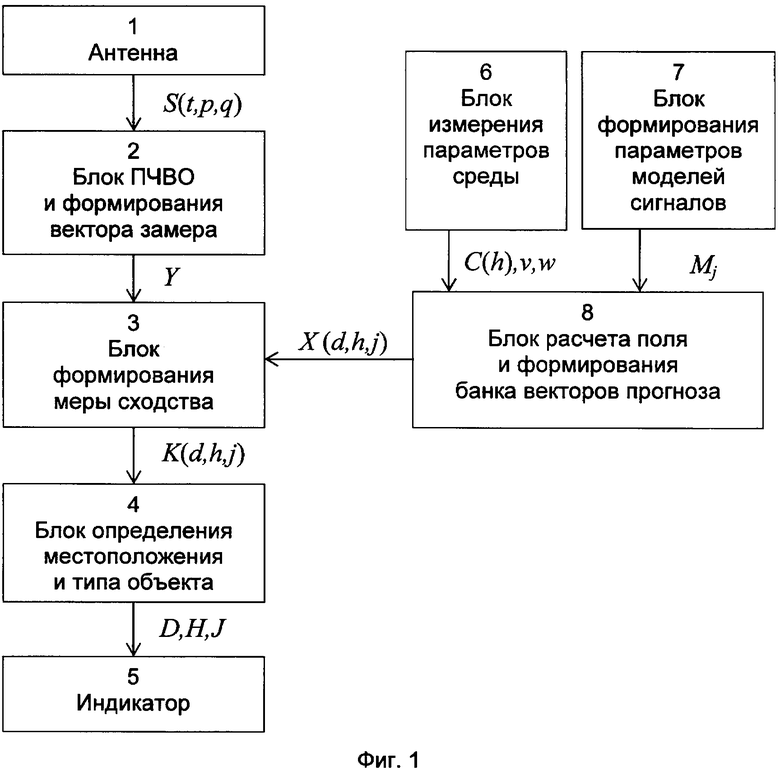
Способ определения местоположения шумящего в море объекта, в котором измеряют параметры среды, производят предварительный расчет гидроакустического поля, для сигнала единичной шумности рассчитывают и сохраняют прогнозные значения отношений сигнал/помеха в широких полосах частот, принимают шумовой сигнал многоэлементной антенной, производят частотно-временную обработку, в результате которой измеряют отношения сигнал/помеха в широких полосах частот в горизонтальном направлении на объект, определяют меру сходства между оценками параметров принятого сигнала и прогнозными значениями параметров в каждой точке набора дистанций, определяют дистанцию до шумящего объекта как точку из набора дистанций, в которой мера сходства максимальна, отличающийся тем, что формируют n характеристик направленности (ХН) в вертикальной плоскости, для каждой из которых при проведении частотно-временной обработки принятого сигнала: формируют l участков рабочего диапазона частот, измеряют отношения сигнал/помеха Q(l,n) в каждом из участков рабочего диапазона частот l в каждой ХН в вертикальной плоскости n, измеряют коэффициенты a(l,n) и b(l,n) аппроксимации логарифма спектра сигнала линейной функцией  зависимости от частоты
зависимости от частоты  для тех же l и n, измеряют частоту F(m,n) и амплитуду U(m,n) дискретных составляющих спектра сигнала в рабочем диапазоне частот от одной до m штук в каждой из n ХН, выделяют амплитудную огибающую сигнала в диапазоне вально-лопастных частот, измеряют частоту Fo(m,n) и амплитуду Uo(m,n) дискретных составляющих спектра амплитудной огибающей для тех же m и n, по результатам обработки формируют многомерный вектор измеренных параметров Y, элементами которого являются Q(l,n), a(l,n), b(l,n), F(m,n), U(m,n), Fo(m,n), Uo(m,n), предварительно формируют совокупность типов объектов, для каждого из которых заданы уровень приведенной шумности и спектральная плотность мощности, для каждого типа объекта j производят расчет гидроакустического поля в каждом узле сетки дистанция × глубина d×h, по результатам расчета получают совокупность многомерных векторов прогнозных параметров Xd,h,j с элементами Qd,h,j(l,n), ad,h,j(l,n), bd,h,j(l,n), Fd,h,j(m,n), Ud,h,j(m,n), Fod,h,j(m,n), Uod,h,j(m,n), для тех же l, n и m, сравнивают прогнозные отношения сигнал/помеха Qd,h,j(l,n) с порогом обнаружения, по результатам сравнения определяют зоны возможного обнаружения каждого объекта по дистанции и глубине, выбирают из совокупности векторов прогнозных параметров Xd,h,j те, которые попали в зоны обнаружения, и формируют из них банк векторов прогнозных параметров X(d,h,j), при определении меры сходства используют вектор измеренных параметров Y и вектора прогнозных параметров X(d,h,j), попавшие в банк, при определении местоположения объекта совместно с оценкой дистанции определяют оценку глубины погружения объекта и его тип.
для тех же l и n, измеряют частоту F(m,n) и амплитуду U(m,n) дискретных составляющих спектра сигнала в рабочем диапазоне частот от одной до m штук в каждой из n ХН, выделяют амплитудную огибающую сигнала в диапазоне вально-лопастных частот, измеряют частоту Fo(m,n) и амплитуду Uo(m,n) дискретных составляющих спектра амплитудной огибающей для тех же m и n, по результатам обработки формируют многомерный вектор измеренных параметров Y, элементами которого являются Q(l,n), a(l,n), b(l,n), F(m,n), U(m,n), Fo(m,n), Uo(m,n), предварительно формируют совокупность типов объектов, для каждого из которых заданы уровень приведенной шумности и спектральная плотность мощности, для каждого типа объекта j производят расчет гидроакустического поля в каждом узле сетки дистанция × глубина d×h, по результатам расчета получают совокупность многомерных векторов прогнозных параметров Xd,h,j с элементами Qd,h,j(l,n), ad,h,j(l,n), bd,h,j(l,n), Fd,h,j(m,n), Ud,h,j(m,n), Fod,h,j(m,n), Uod,h,j(m,n), для тех же l, n и m, сравнивают прогнозные отношения сигнал/помеха Qd,h,j(l,n) с порогом обнаружения, по результатам сравнения определяют зоны возможного обнаружения каждого объекта по дистанции и глубине, выбирают из совокупности векторов прогнозных параметров Xd,h,j те, которые попали в зоны обнаружения, и формируют из них банк векторов прогнозных параметров X(d,h,j), при определении меры сходства используют вектор измеренных параметров Y и вектора прогнозных параметров X(d,h,j), попавшие в банк, при определении местоположения объекта совместно с оценкой дистанции определяют оценку глубины погружения объекта и его тип.
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| БУРДИК B.C | |||
| Анализ гидроакустических систем | |||
| - Л.: Судостроение, 1988, с | |||
| Устройство для получения водяного пара и подведения его в толщу горящего топлива | 1921 |
|
SU377A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2009 |
|
RU2414732C1 |
| JP 2001330659 A, 30.11.2001. | |||

