Изобретение относится к гидроакустике и может быть использовано для определения координат и параметров движения объекта по данным пассивных средств наблюдения.
Известны способы определения местоположения и параметров движения объекта по измерениям угловых координат, когда измеряется только направление (пеленг) на объект (цель), как это имеет место в гидроакустических станциях шумопеленгования (далее - ГАС).
Определение координат и параметров движения цели (КПДЦ) без выполнения специального маневрирования носителем ГАС (наблюдателем) осуществляется несколькими способами - энергетическим, динамическим, триангуляционным, горизонтальным разностно-дальномерным и другими [1]. Данные способы предполагают наличие в составе ГАС не менее двух-трех разнесенных в пространстве антенн. Применение указанных способов затруднено большой зависимостью точности определения КПДЦ от расстояния между антеннами ГАС и, как следствие, необходимостью большого разнесения антенн в пределах одного носителя, что не всегда выполнимо.
Известны способы определения КПДЦ по данным только от одной антенны ГАС. Способ «n - пеленгов» [2] обеспечивает определение КПДЦ путем последовательного взятия отсчетов пеленгов на прямолинейном и равномерном участке движения наблюдателя и выполнение последующего маневра, что позволяет определить КПДЦ на момент взятия последнего отсчета. Недостатком данного способа является недопустимо длительное (иногда - до нескольких десятков минут) время решения задачи и необходимость выполнения наблюдателем специального маневрирования.
Способы «корректура», «подбор», «фильтрация» [3], алгоритм, предложенный в [4], а также способ определения параметров движения маневрирующего объекта [5] позволяют определить КПДЦ без выполнения наблюдателем специального маневрирования по данным одной антенны ГАС. Недостатками указанных способов являются большая зависимость от наличия и точности введенной априорной информации о цели; высокая степень загрузки оператора в процессе решения, особенно при большом количестве целей; значительная зависимость точности определения КПДЦ от опыта и квалификации оператора.
Примечание. Термином «оператор» здесь и далее обозначается оператор боевой информационно-управляющей системы (БИУС), интегрированной системы боевого управления (ИСБУ) или другого устройства, с помощью которого производится определение КПДЦ на конкретном носителе ГАС.
Рассмотренные выше способы определения КПДЦ решаются различными математическими методами (наименьших квадратов - «n -пеленгов», «корректура»; последовательных приближений - «подбор»; калмановской фильтрации - «фильтрация» [3]) с использованием существенно отличающихся алгоритмов и имеют существенно различную процедуру решения.
Наиболее близким по сумме признаков аналогом изобретения является способ «n-пеленгов» [2, 3]. Способ-прототип включает определение пеленга и сглаживание ошибок, обнаружение сигнала от маневрирующего объекта, взятие его на автоматическое сопровождение и классификацию. Измеренные через равные промежутки времени t1 пеленга на цель используются для построения траектории цели. Достоинством данного способа является то, что он не требует активного вмешательства оператора в процесс определения КПДЦ, к числу же его недостатков, кроме упомянутых выше недопустимо большого времени решения задачи и необходимости выполнения специального маневрирования, относятся невозможность использования априорной информации о цели, а также невозможность определения КПДЦ по данным разнесенных антенн ГАС.
Эти недостатки ограничивают наблюдателя в полноценной реализации возможностей ГАС, а как следствие - в реализации возможностей, заложенных в носитель ГАС в целом.
Задачей изобретения является расширение функциональных возможностей носителей ГАС (в том числе отличающихся составом и количеством приемных антенн) по определению местоположения и параметров движения объектов наблюдения.
Технический результат от использования изобретения заключается в унификации задачи определения КПДЦ по данным ГАС, минимизации участия оператора в процессе решения, а также повышении точности и уменьшении времени ее решения.
Поставленная задача решается путем определения точки на плоскости, плотность вероятности нахождения цели в которой при имеющемся количестве входной информации максимальна.
Новым существенным признаком изобретения является то, что предлагаемый способ является универсальным: он может быть использован для определения КПДЦ по данным ГАС, имеющих как одну, так и несколько приемных антенн, как подвижными, так и неподвижными (в том числе позиционными и стационарными) ГАС, как с использованием априорной информации о цели и характере ее маневрирования, так и без нее.
Другим существенным признаком изобретения является то, что оператор получает не единичные значения величин, составляющих КПДЦ (т.е. курс цели, скорость цели и дистанцию до нее), а их вероятностные распределения, что позволяет иметь более полное суждение о местонахождении цели и характере ее движения.
За счет этого уменьшается нагрузка на оператора, особенно при большом количестве целей, возрастает точность и качество решения задачи определения КПДЦ, а также уменьшается время ее решения.
Сущность изобретения поясняется фиг. 1-17.
На фиг. 1 приведена область возможного положения цели при наличии (а) и отсутствии (б) информации о дистанции до цели.
На фиг. 2 отражен процесс пеленгования цели, где  - матрицы пеленгов, поступающие в моменты времени t0-t5.
- матрицы пеленгов, поступающие в моменты времени t0-t5.
На фиг. 3 показан фрагмент матрицы пеленга на цель (размер матрицы 300 на 300 элементов) на «начальном» участке пеленга.
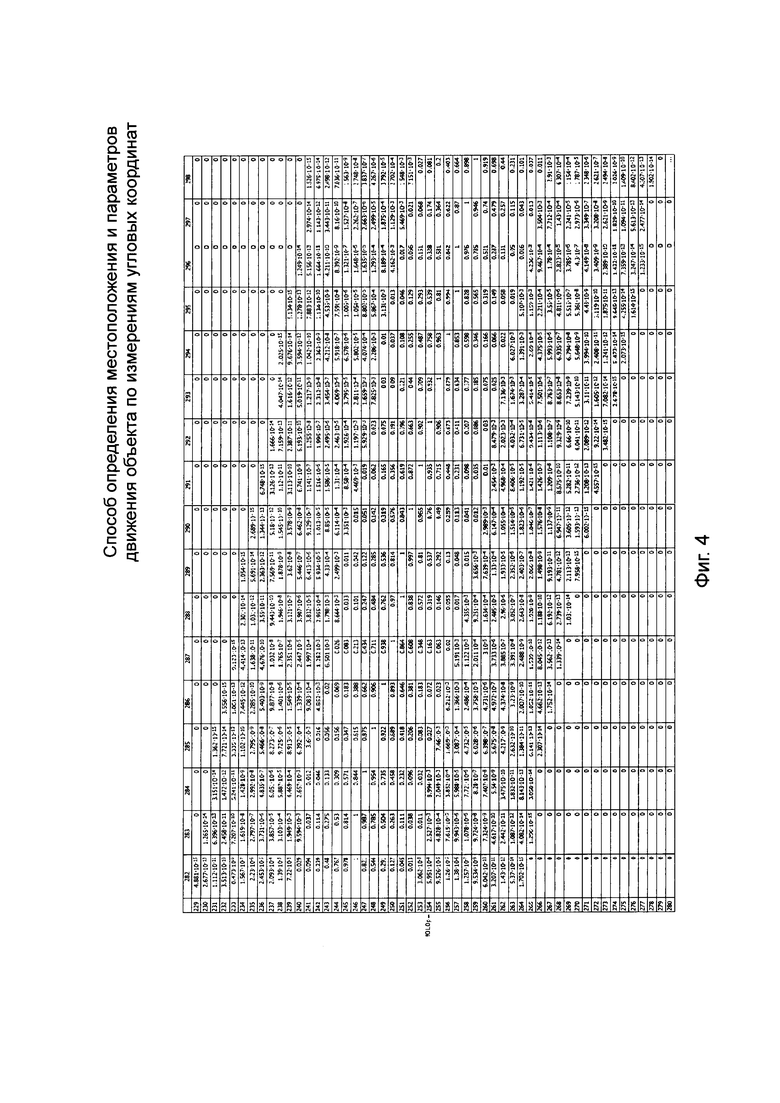
На фиг. 4 показан фрагмент матрицы пеленга на цель (размер матрицы 300 на 300 элементов) на «конечном» участке пеленга.
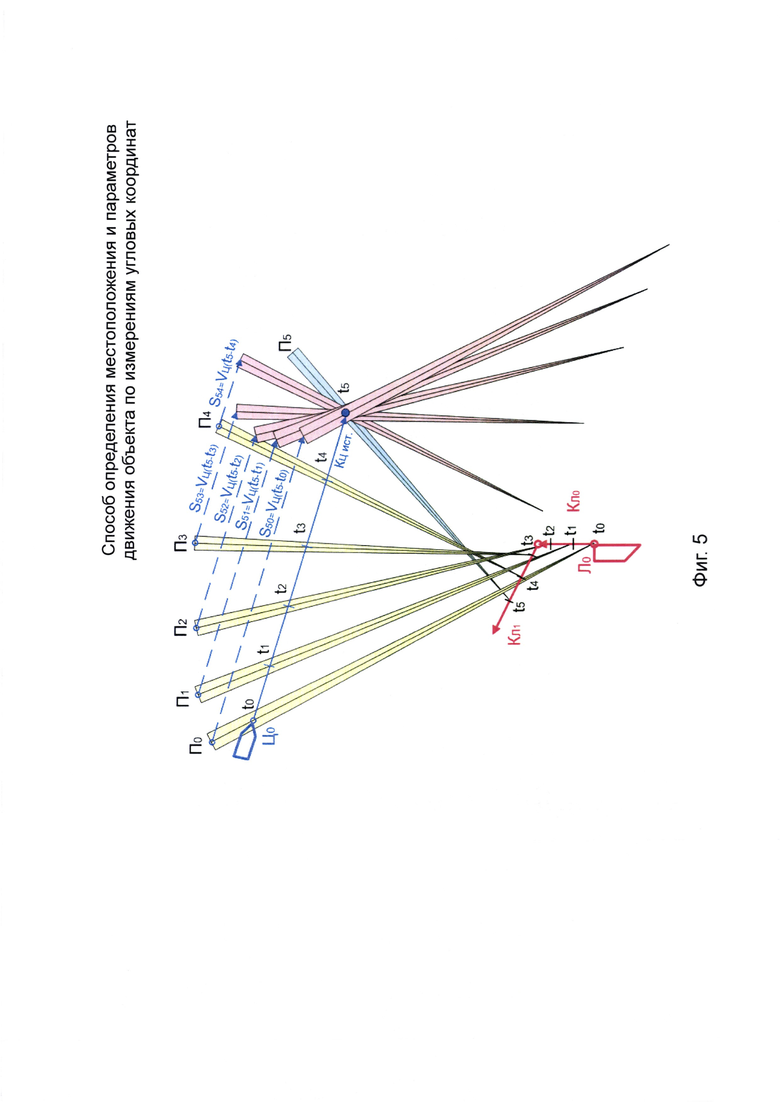
На фиг. 5 показан геометрический смысл способа определения местоположения и параметров движения объекта по измерениям угловых координат в ситуации, когда расчетные параметры движения цели соответствуют истинным.
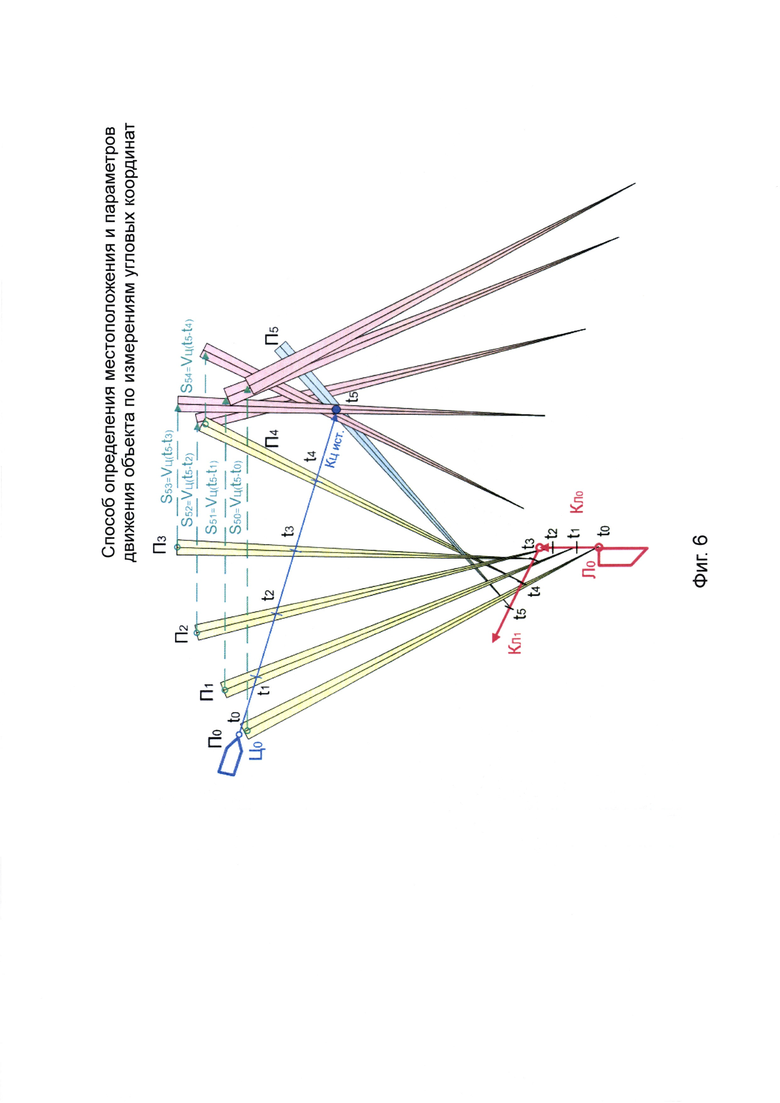
На фиг. 6 показан геометрический смысл способа определения местоположения и параметров движения объекта по измерениям угловых координат в ситуации, когда расчетные параметры движения цели не соответствуют истинным.
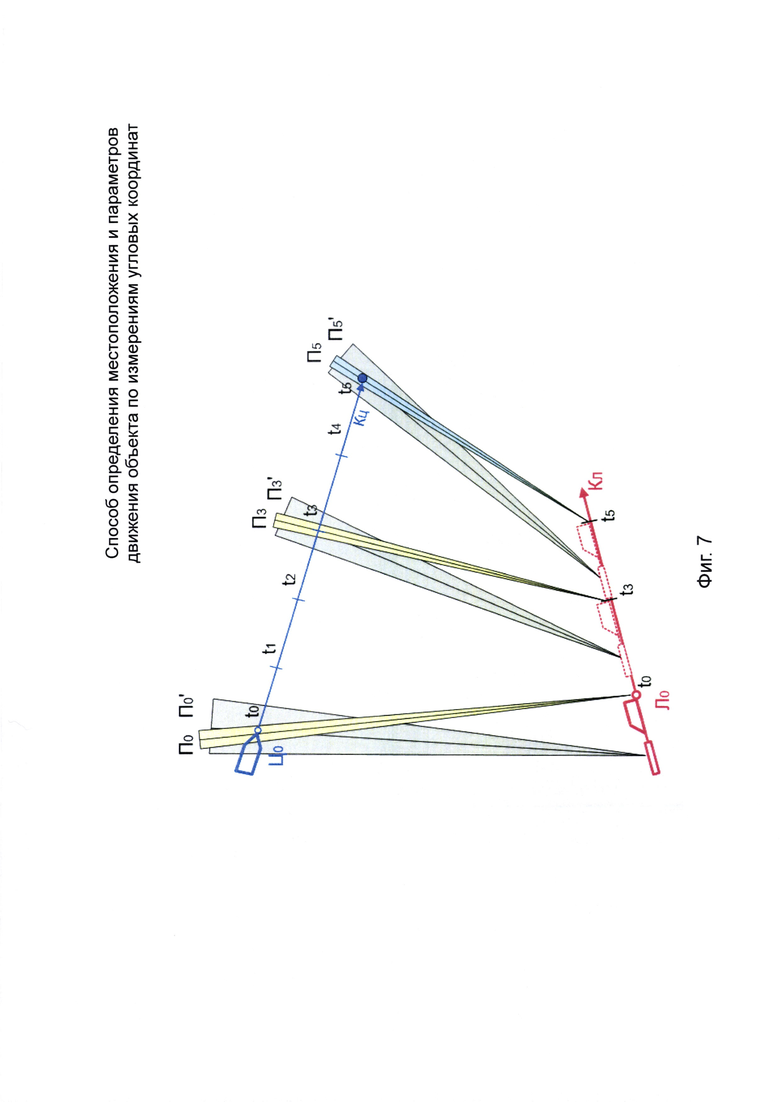
На фиг. 7 показано использование способа для определения местоположения и параметров движения объекта по данным основной и буксируемой антенн ГАС.
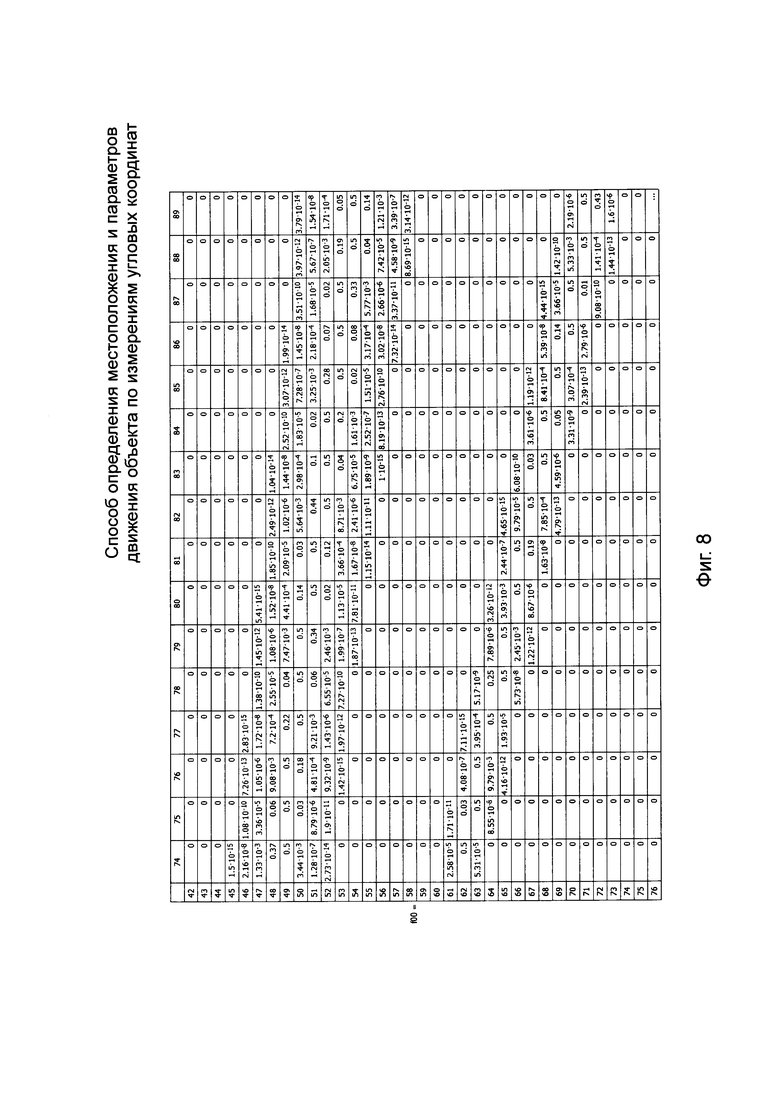
На фиг. 8 показан фрагмент матрицы пеленга на цель при определении местоположения и параметров движения объекта по данным основной и буксируемой антенн ГАС (точнее, двух пеленгов, поскольку пеленга от каждой из антенн ГАС имеют разные значения как собственно величины пеленга, так и величины среднеквадратической ошибки (СКО) пеленгования).
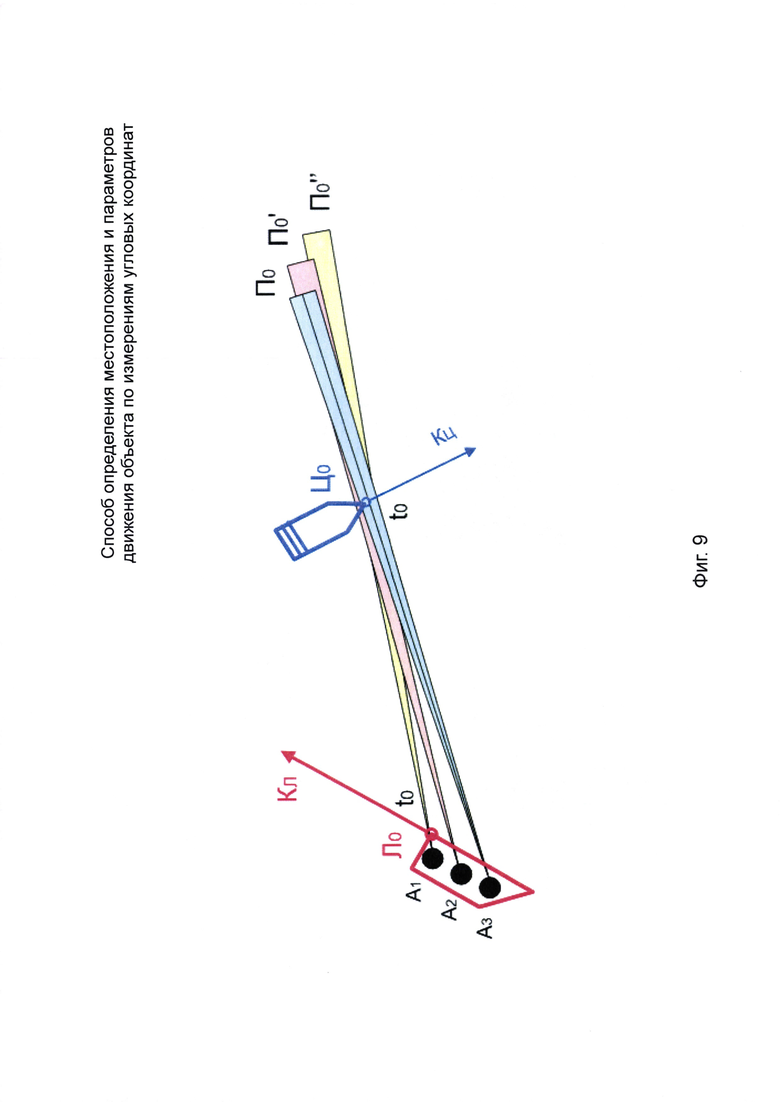
На фиг. 9 показано использование способа для определения местоположения и параметров движения объекта по данным трех бортовых конформных антенн ГАС.
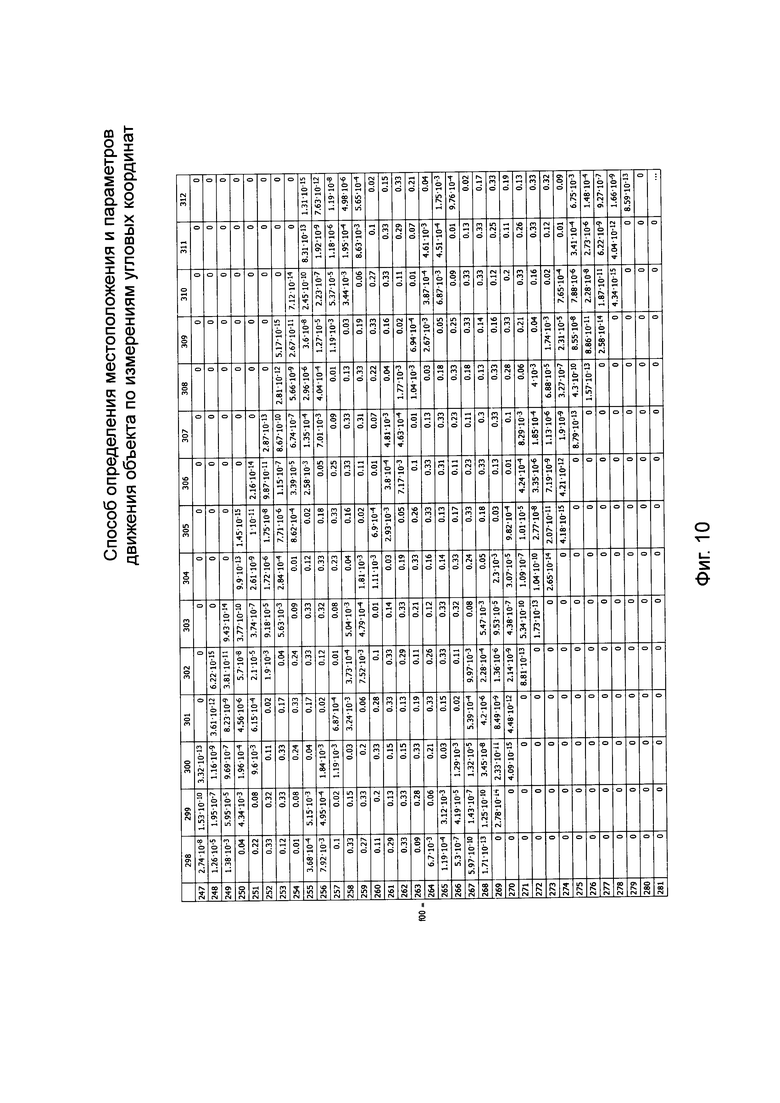
На фиг. 10 показан фрагмент матрицы пеленга на цель при определении местоположения и параметров движения объекта по данным трех бортовых конформных антенн ГАС (точнее, трех пеленгов от каждой из антенн, наложение которых друг на друга с учетом СКО пеленгования дает указанную матрицу).
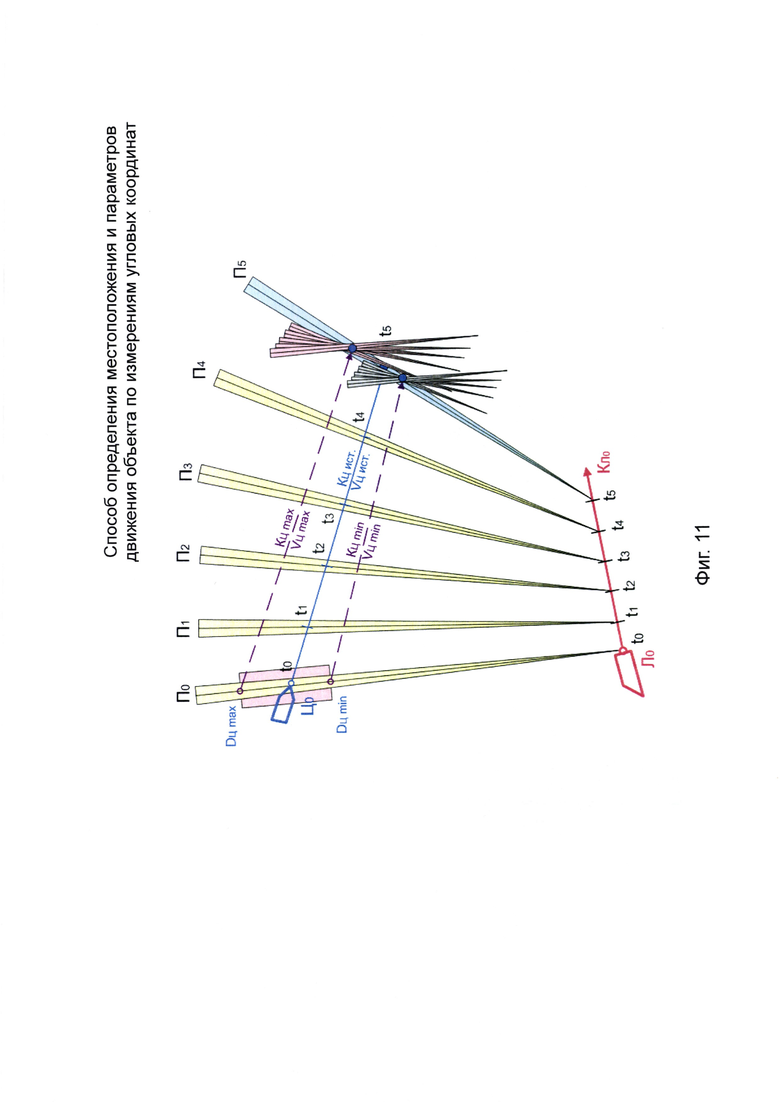
На фиг. 11 показан геометрический смысл способа определения местоположения и параметров движения объекта по данным основной антенны ГАС, без совершения маневра носителем ГАС, с введением априорной информации о секторе возможных курсов цели (и (или) интервале скоростей ее хода, интервале возможных дистанций до нее).
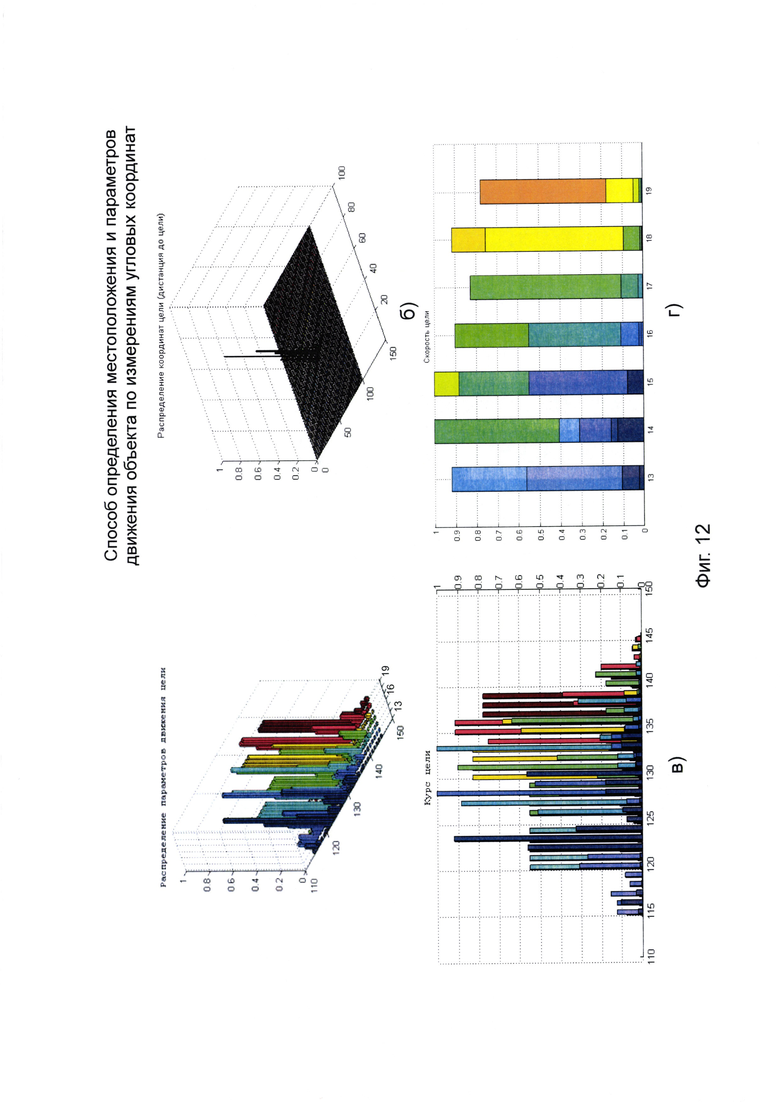
На фиг. 12 приведен пример распределения параметров движения цели (а), распределения местоположения (координат) цели (б), распределения курса (в) и скорости цели (г) через 3 минуты после начала решения задачи определения местоположения и параметров движения цели. Фиг. 12в) и 12г) являются двумерными проекциями Фиг. 12а), соответственно для курса (Фиг. 12в)) и скорости (Фиг. 12г)) цели.
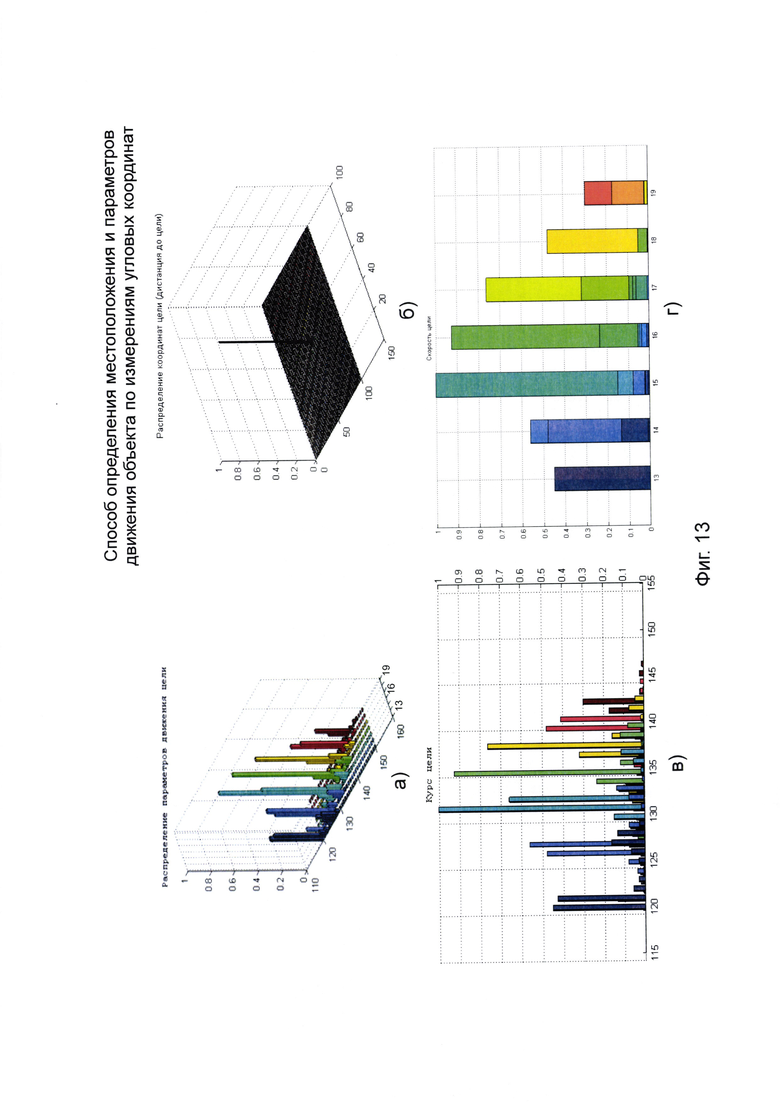
На фиг. 13 приведен пример распределения параметров движения цели (а), распределения местоположения (координат) цели (б), распределения курса (в) и скорости цели (г) через 6 минут после начала решения задачи.
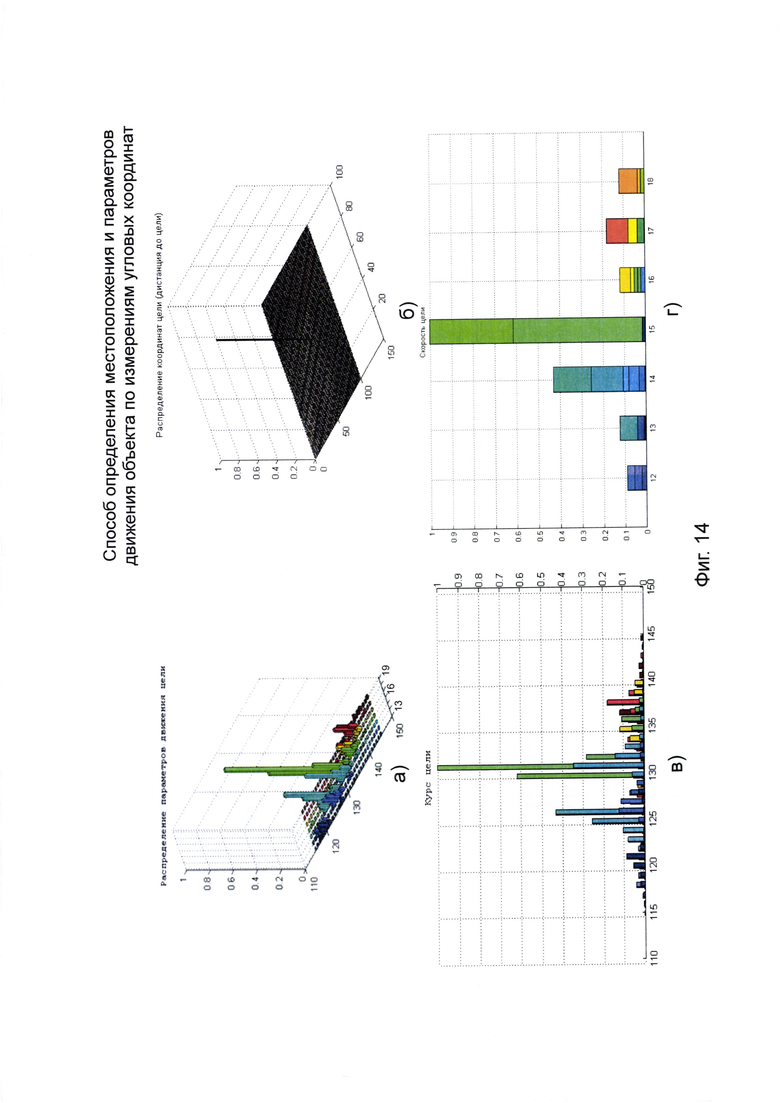
На фиг. 14 приведен пример распределения параметров движения цели (а), распределения местоположения (координат) цели (б), распределения курса (в) и скорости цели (г) через 9 минут после начала решения задачи.
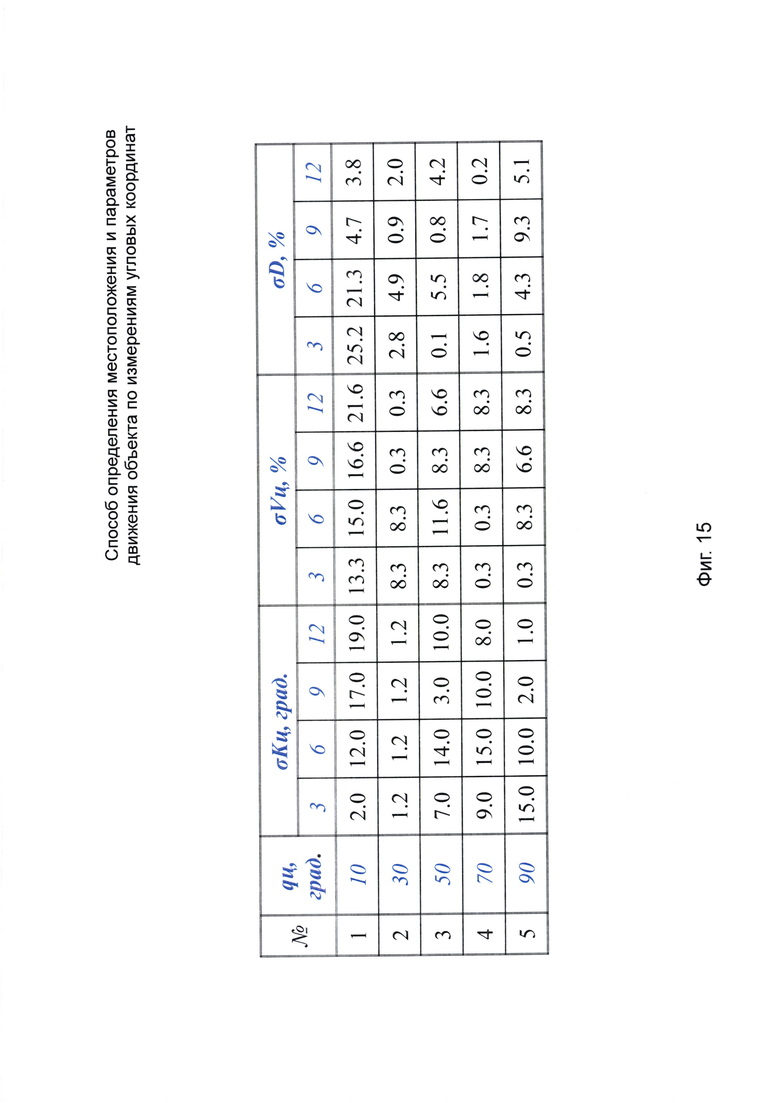
На фиг. 15 показана таблица оценки точности определения местоположения и параметров движения цели по данным основной и буксируемой антенн ГАС.
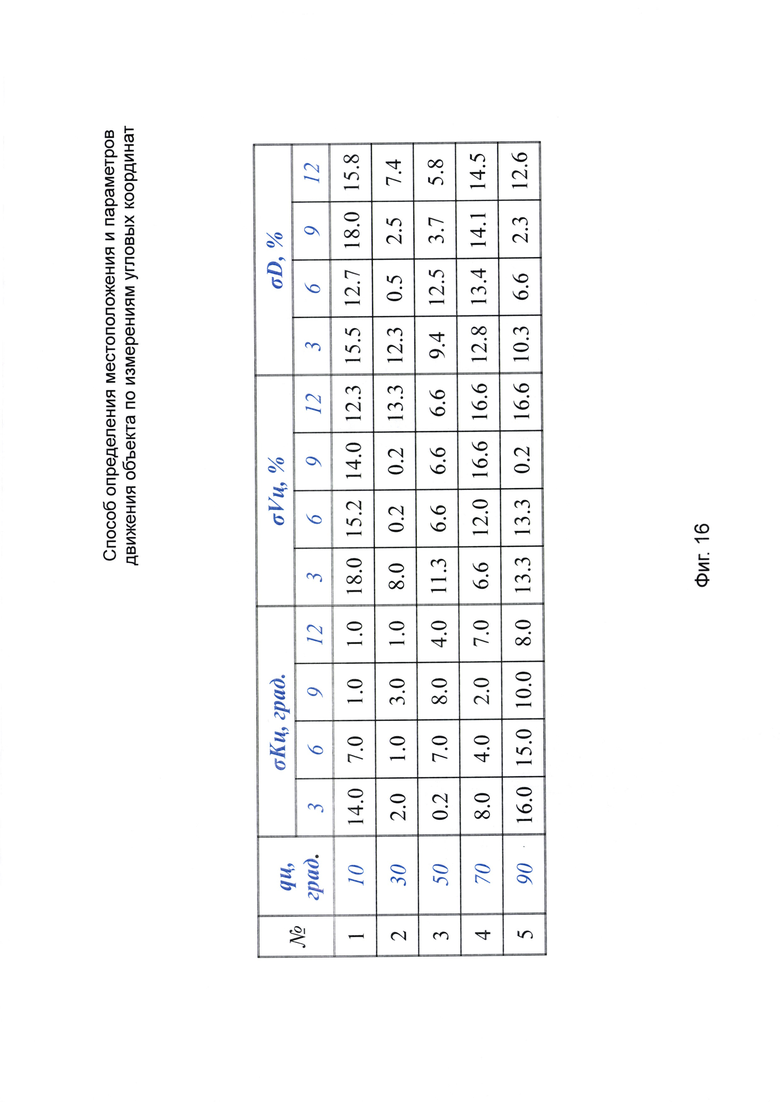
На фиг. 16 показана таблица оценки точности определения местоположения и параметров движения цели по данным трех бортовых конформных антенн ГАС.
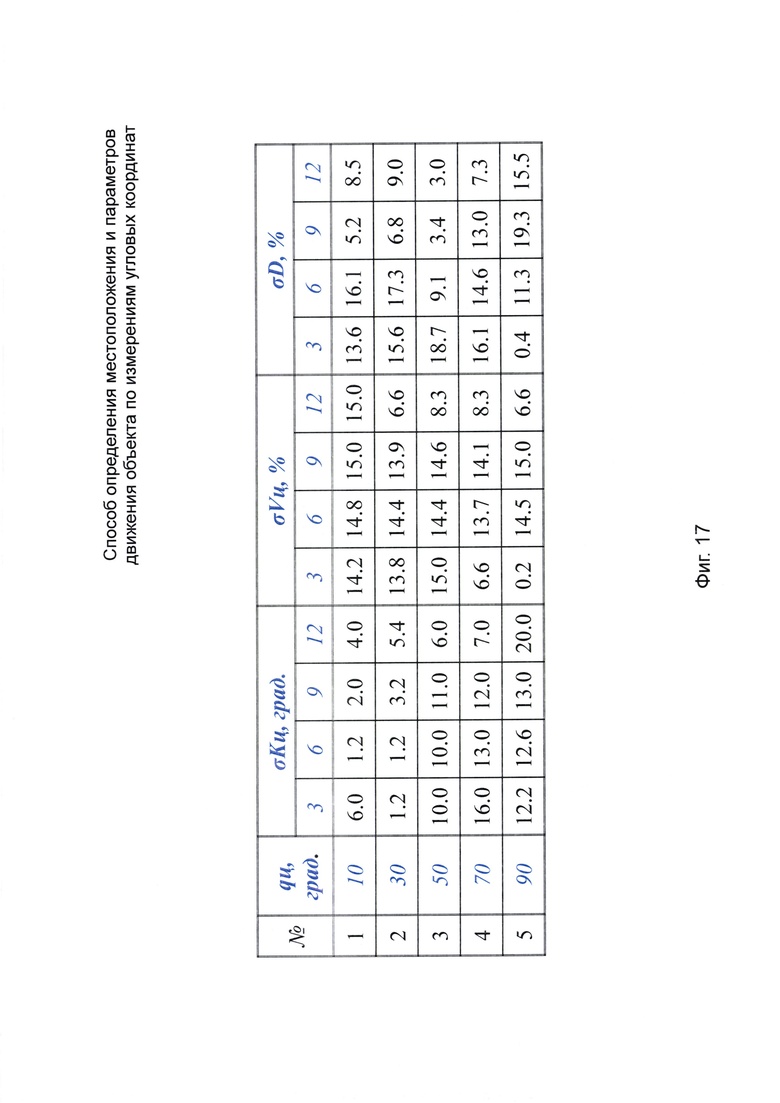
На фиг. 17 показана таблица оценки точности определения местоположения и параметров движения цели по данным основной антенны ГАС, без совершения маневра носителем ГАС, с введением априорной информации о секторе возможных курсов цели, интервале скоростей ее хода и интервале возможных дистанций до нее.
Способ осуществляется следующим образом. Область возможного положения цели на плоскости (ОВПЦ) в любой момент времени представляет собой некоторую фигуру или область, которая, в первом приближении, при наличии информации о дистанции до цели может быть изображена в виде эллипса (фиг. 1а), а при ее отсутствии - в виде сектора (фиг. 1б). Размеры указанных фигур определяются погрешностями знания места цели - в данном случае СКО пеленгования σП и СКО дистанции до цели σD.
При решении задачи способом определения местоположения и параметров движения объекта по измерениям угловых координат (далее - «способ») распределение цели принимается равномерным вдоль оси, параллельной пеленгу на цель, и нормальным - вдоль оси, перпендикулярной пеленгу, плотность распределения места цели может быть представлена выражением

где x, y - координаты цели;
β - угол наклона сектора рассеяния к оси ординат, в данном случае - пеленг на цель (на фиг. 1б) - П0);
σβ - СКО пеленгования (на фиг. 1б) - σП);
σx(x,y) - СКО координат цели по малой полуоси сектора рассеяния, определяемая, в свою очередь, выражением

Примечание. Как это следует из выражения (1), система координат развернута на угол β, поэтому σx(x,y) - СКО координат цели именно вдоль оси, перпендикулярной пеленгу на цель, а не ее проекция на ось абсцисс в исходной системе координат.
Далее полученное вероятностное распределение необходимо привести к матричной форме, что выполняется следующим образом. Расчетная область X разделяется на n2 ячеек, если необходимо, чтобы матрица была квадратной, или nx×ny ячеек, если матрица должна быть прямоугольной. Задается также шаг дискретизации по осям Δx и Δy. Тогда распределение цели, заданное выражением (1), может быть представлено в виде матрицы р=(pi,j), где

x0, y0 - координаты наблюдателя (на фиг. 1б) - точка Л0).
Полученная таким образом матрица начального распределения цели (далее - матрица пеленга) нормализуется с использованием выражения

где  - максимальное значение в матрице по столбцу с j-м номером.
- максимальное значение в матрице по столбцу с j-м номером.
Примечание. Выражение (4) справедливо в случае, когда центральная ось сектора рассеяния (далее - ось пеленга) располагается вдоль оси абсцисс. По мере приближения оси пеленга к оси квадранта системы координат, выражение (4) необходимо преобразовать к виду

где - максимальное значение в матрице по строке с i-м номером.
Таким образом, получается такое распределение, когда на оси пеленга все элементы матрицы равны 1, а перпендикулярно оси - распределены нормально с величиной σx, определяемой выражением (2). Аналогично определяются матрицы других пеленгов, поступающих от ГАК за время определения КПДЦ (фиг. 2), фрагменты указанных матриц показаны на фиг. 3-4.
Геометрический смысл способа представлен на фиг. 5. Матрицы всех пеленгов приводятся к одному моменту времени (удобнее - ко времени последнего пеленга), после чего производится их суммирование для каждой k-й комбинации «курс цели - скорость цели» с использованием выражения

где Fk - суммарная матрица k-й комбинации «курс цели - скорость цели»;
N - количество суммируемых пеленгов (матриц);
ƒkn - матрица n-го пеленга в k-й комбинации «курс цели - скорость цели», где n=1…N;
r - константа, предназначенная для более явного выделения максимума.
Далее в каждой матрице Fk производится поиск максимума max (Fk). Найденные максимумы нормируются и сравниваются между собой, и та матрица Fk, которая содержит ячейку max (Fk), значение которой равно 1, считается в наибольшей степени соответствующей реальным параметрам движения цели (на фиг. 5 данной ячейке соответствует точка пересечения всех «перемещенных» пеленгов с пеленгом П5). Соответственно, размещение данной ячейки в указанной матрице соответствует точке на плоскости, где плотность распределения цели максимальна, т.е. местоположению цели.
Если же комбинация «курс цели - скорость цели» не соответствует действительности, то выраженного пересечения перемещенных пеленгов в одной точке не получается (фиг. 6) и, соответственно, значение максимума max (Fk) у такой суммарной матрицы будет меньше, чем у матрицы, соответствующей истинным (или близким к таковым) параметрам движения цели.
Приведение матриц пеленгов к одному моменту времени осуществляется с использованием выражения

где ƒ0 - матрица некоторого пеленга, полученная с помощью выражения (4) или (5);
ƒk - матрица пеленга, перемещенного параллельно самому себе на расстояние  в направлении
в направлении  (k - номер комбинации «курс цели - скорость цели»;
(k - номер комбинации «курс цели - скорость цели»;
,  , tk - соответственно, курс, скорость и время прямолинейного движения цели при k-й комбинации «курс цели - скорость цели»;
, tk - соответственно, курс, скорость и время прямолинейного движения цели при k-й комбинации «курс цели - скорость цели»;
round (x) - оператор, показывающий ближайшее к числу x целое число;
Δx и Δy - шаг дискретизации по осям соответственно x и y, иначе - размер элементов матриц пеленгов.
При определении КПДЦ по данным двух (основной и буксируемой) антенн ГАС, способ не претерпевает практически никаких изменений, единственным отличием является некоторое усложнение расчета матриц пеленгов. Предположим, носитель ГАС получает информацию о цели с использованием, в данном случае, двух антенн, каждая из которых имеет свою точность пеленгования (фиг. 7). Пусть ƒn1 - матрица n-го пеленга, полученного от первой антенны (основная антенна ГАС), как это описано выше, ƒn2 - соответственно, матрица n - го пеленга, полученного от второй антенны (буксируемая антенна, имеющая меньшую точность пеленгования, чем основная антенна). Тогда матрица n-го пеленга (а фактически - двух пеленгов, поскольку пеленг на цель от каждой из антенн будет разным) может быть получена с использованием следующего выражения

Фрагмент такой матрицы приведен на фиг. 8.
Соответственно, при определении КПДЦ по данным трех бортовых конформных антенн ГАС (фиг. 9) матрица n-го пеленга (а фактически - трех пеленгов) может быть получена с использованием выражения

Фрагмент указанной матрицы изображен на фиг. 10.
На фиг. 11 представлен геометрический смысл способа определения местоположения и параметров движения объекта по данным основной антенны ГАС, без совершения маневра носителем ГАС, с введением априорной информации о секторе возможных курсов цели (и (или) интервале скоростей ее хода, интервале возможных дистанций до нее). Указанные ограничения вводятся путем ограничения размера матриц по дистанции до цели, а также задания количества комбинаций «курс цели - скорость цели».
Будучи выведенными на график (фиг. 12), указанные выше максимумы max (Fk) дают представление о характере распределения параметров движения цели, а также том, в какой степени та или иная комбинация «курс цели - скорость цели» превалирует над остальными. По мере увеличения времени наблюдения и, соответственно, времени решения задачи, характер распределения параметров движения цели изменяется (фиг. 13 - фиг. 14), что позволяет точнее выявить истинные значения КПДЦ или, напротив, сделать заключение о необходимости совершить маневр, продолжить наблюдение на текущем курсе и т.д.
Задача оценки эффективности того или иного способа определения КПДЦ сама по себе не является тривиальной. Например, в работе [6] предложен методический аппарат для обоснования требований к точности определения КПДЦ по данным ГАС. Как правило, ключевыми величинами, по отношению к которым определяется эффективность того или иного алгоритма определения КПДЦ, являются время решения задачи на заданной дистанции до цели. Однако известно [2, 3], что ошибки определения КПДЦ при разных значениях курсового угла цели проявляются по-разному, например на острых курсовых углах в большей степени проявляется ошибка в курсе, на курсовых углах, близких к прямому - в дистанции и т.д. Таким образом, «поведение» ошибок определения КПДЦ необходимо исследовать не только в зависимости от времени определения КПДЦ, но и от ситуации изменения взаимного положения носителя ГАС и цели.
С учетом сказанного, оценка эффективности способа производилась для следующих условий сближения наблюдателя и цели: курс наблюдателя - Кл=0°, скорость наблюдателя Vл=6 уз., курс цели Кц=180°, скорость цели Vц=12 уз., начальная дистанция до цели - 100 каб. Время решения задачи - 3, 6, 9 и 12 минут с момента обнаружения цели. Пеленг обнаружения цели изменяется в интервале от 10° до 90°, т.е. начальный курсовой угол цели  , в свою очередь, также изменяется от 10° до 90°.
, в свою очередь, также изменяется от 10° до 90°.
Оценка точности решения задачи определения местоположения и параметров движения объекта предлагаемым способом - СКО курса цели ( , град.), СКО скорости цели (
, град.), СКО скорости цели ( , в процентах от истинной скорости цели) и СКО дистанции до цели (σD в процентах от текущей дистанции) приведены на фиг. 15-17.
, в процентах от истинной скорости цели) и СКО дистанции до цели (σD в процентах от текущей дистанции) приведены на фиг. 15-17.
На фиг. 15 приведены результаты оценки точности определения местоположения и параметров движения объекта с использованием буксируемой антенны ГАС (фиг. 7). СКО пеленгования основной антенны ГАС принята равной 0,15°, СКО пеленгования буксируемой антенны ГАС - 0,3°, расстояние между акустическими центрами антенн - 1000 метров.
На фиг. 16 приведены результаты оценки точности определения местоположения и параметров движения объекта по данным трех бортовых конформных антенн ГАС (фиг. 9), СКО пеленгования всех антенн принята равной 0,15°, расстояние между антеннами - 40 метров.
На фиг. 17 приведены результаты оценки точности определения местоположения и параметров движения цели по данным основной антенны ГАС, без совершения маневра носителем ГАС, с вводом априорной информации о секторе возможных курсов цели, интервале скоростей ее хода и интервале возможных дистанций до нее. СКО пеленгования принята равной 0,3°. Введенные ограничения: сектор курсов цели ±30° (т.е. Кц min=150°, Кц max=210°), интервал скоростей ±25% (т.е. Уц min=9 уз., Уц max=15 уз.), интервал дистанций ±30% (т.е. D min=70 каб., D max=130 каб.).
Сравнение представленных результатов с результатами, полученными другими способами определения КПДЦ [1, 3, 4] показывает, что предлагаемый способ обладает большей точностью при равном времени определения КПДЦ, а также обладает свойством универсальности как по отношению к составу ГАС, так и к составу априорной информации о цели.
Предлагаемый новый способ определения местоположения и параметров движения объекта по измерениям угловых координат может быть реализован в БИУС (ИСБУ) современных и перспективных носителей ГАС. Способ может заменить все существующие в настоящее время способы определения КПДЦ - «n - пеленгов», «корректура», «подбор», «фильтрация». Реализация способа не требует от оператора особенных профессиональных навыков, в то время как эффективность указанных «традиционных» способов в значительной степени определяется именно опытом и квалификацией оператора.
Источники информации
1. Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели. // Морская радиоэлектроника, Вып. 2 (40), 2012. - С. 30-34.
2. Скворцов М.И. Основы маневрирования кораблей [Текст] / М.И. Скворцов, И.В. Юхов, Б.И. Землянов и др. - М.: Воениздат, 1966. - 270 с.
3. Поленин В.И. Методы и задачи определения координат и параметров движения цели по данным ГАК подводных лодок [Текст]: монография / В.И. Поленин. - СПб.: ВМА им. Н.Г. Кузнецова, 2003. - 103 с.
4. Гриненков А.В., Машошин А.И., Савватеев К.Ф. Алгоритм автоматического определения координат и параметров движения целей без специального маневрирования наблюдателя. // Морская радиоэлектроника, Вып. 4 (50), 2014. - С. 50-57.
5. Патент РФ, №2196341 МПК G01S 3/80, 01.11.2001 - Способ определения параметров движения маневрирующего объекта.
6. Захаров В.Л., Машошин А.И. Методический аппарат для обоснования требований к точности определения координат и параметров движения целей по информации гидроакустического комплекса подводной лодки. // Морская радиоэлектроника, Вып. 4 (38), 2011. - С. 36-39.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ, ЭЛЕМЕНТОВ ДВИЖЕНИЯ ЦЕЛИ И КОЭФФИЦИЕНТА КИЛОМЕТРИЧЕСКОГО ЗАТУХАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ЦЕЛИ | 2014 |
|
RU2586078C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| Гидроакустический способ определения параметров движения цели в режиме шумопеленгования | 2023 |
|
RU2814151C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Корабль освещения подводной обстановки | 2022 |
|
RU2803404C1 |
| Способ обнаружения, классификации и определения координат и параметров движения морской шумящей цели | 2018 |
|
RU2692839C1 |
Изобретение относится к гидроакустике и может быть использовано для определения координат положения и параметров движения объекта по данным пассивных гидроакустических средств с использованием как одной, так и нескольких приемных антенн. Достигаемый технический результат - повышение точности и унификации способов определения координат положения и параметров движения объекта без выполнения маневра носителя средств обнаружения. Сущность способа заключается в том, что пеленга 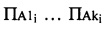 на шумящий объект, движущийся курсом Кист и скоростью Vист, полученные от каждой из k гидроакустических антенн, отображаются в виде единой матрицы
на шумящий объект, движущийся курсом Кист и скоростью Vист, полученные от каждой из k гидроакустических антенн, отображаются в виде единой матрицы  распределения положения объекта на плоскости, после чего производится сдвиг полученных матриц в направлениях возможного перемещения объекта при его движении курсом К1, К2, …, Km, … Кр и скоростью V1, V2, …,Vn, … Vr, приведение их к одному моменту времени и последующее поэлементное суммирование, при этом считается, что параметры сдвига (Кm, Vn) суммарной матрицы Mmn, содержащей элемент с максимальным значением, в наибольшей степени соответствуют истинным параметрам движения объекта (Кист, Vист), а расположение данного элемента в матрице Mmn указывает на истинное местоположение объекта на плоскости. 17 ил.
распределения положения объекта на плоскости, после чего производится сдвиг полученных матриц в направлениях возможного перемещения объекта при его движении курсом К1, К2, …, Km, … Кр и скоростью V1, V2, …,Vn, … Vr, приведение их к одному моменту времени и последующее поэлементное суммирование, при этом считается, что параметры сдвига (Кm, Vn) суммарной матрицы Mmn, содержащей элемент с максимальным значением, в наибольшей степени соответствуют истинным параметрам движения объекта (Кист, Vист), а расположение данного элемента в матрице Mmn указывает на истинное местоположение объекта на плоскости. 17 ил.
Способ определения местоположения и параметров движения объекта по измерениям угловых координат, включающий прием акустического шумового сигнала маневрирующего объекта антенной А или антеннами А1, А2…Ak гидроакустического комплекса наблюдателя, где k - количество антенн, преобразование акустического шумового сигнала в электрический, предварительное усиление и первичную обработку принятого сигнала, автоматическое сопровождение объекта по углу, его классификацию и последовательное измерение пеленгов  или совокупностей пеленгов
или совокупностей пеленгов  ;
;  ;
; в моменты времени t1, t2, … Т на объект, маневрирующий курсом Кист и скоростью Vист,
в моменты времени t1, t2, … Т на объект, маневрирующий курсом Кист и скоростью Vист,
отличающийся тем, что полученные пеленга или совокупности пеленгов отображаются в виде матриц П1, П2, … Пт распределения положения объекта на плоскости, после чего производится сдвиг указанных матриц в направлениях возможного перемещения объекта при его движении курсом К1, К2, … Кр, где р - количество значений курса объекта, на расстояние, проходимое им скоростью V1, V2, … Vr, где r - количество значений скорости объекта, за время t1, t2, … Т, и последующее поэлементное суммирование полученных матриц, при этом считается, что параметры сдвига полученной суммарной матрицы, которая содержит элемент с максимальным значением, в наибольшей степени соответствуют истинным параметрам движения объекта, маневрирующего курсом Кист и скоростью Vист, а расположение указанного элемента в данной матрице указывает на истинное местоположение объекта на плоскости.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ ИСПЫТАНИЯ МАТЕРИАЛОВ НА КОНТАКТНУЮУСТАЛОСТЬ | 0 |
|
SU288374A1 |
| WO 2002067008 A1, 29.08.2002 | |||
| DE 10153444 C1, 20.02.2003. | |||

