Изобретение относится к системам навигации, охраны, мониторинга и учета транспортных средств и стационарных объектов с помощью спутниковой или мобильной связи посредством регистрации информации о транспортном средстве, его маршруте перемещения, состоянии агрегатов и других его параметрах, а также информации о массе, позиционировании и идентификации стационарных объектов.
Известен способ мониторинга, сопровождения и управления наземными транспортными средствами [RU №2288509, МПК G08B 25/10 (2006.01), опубликовано 27.11.2006], в котором на борту каждого контролируемого подвижного объекта принимаются сигналы глобальной спутниковой системы радионавигации, посредством бортовых датчиков подвижного объекта определяют состояние его узлов и агрегатов, формируют соответствующие сообщения и передают сигналы, несущие указанные сообщения, по радиоэфиру в диспетчерский центр, используя для этого бортовой терминал сети подвижной связи, например GSM-сети, и/или бортовой терминал специализированной ретрансляционно-радиопеленгационной сети, в диспетчерском пункте принимают указанные сигналы, обрабатывают информацию с построением траектории движения подвижного объекта на фоне электронной карты местности и формируют для контролируемых подвижных объектов командные сообщения, например команды блокирования движения подвижного объекта, передают эти командные сообщения по сети подвижной связи и/или по ретрансляционно-радиопеленгационной сети на борт контролируемого подвижного объекта.
Основным недостатком описанного технического решения является сложность его практической реализации, что связано с необходимостью развертывания и поддержания в работоспособном состоянии территориально-распределенной ретрансляционно-радиопеленгационной сети.
Известна спутниковая охранно-поисковая система, являющаяся несколько более простой в практической реализации [RU №2349472 С1, МПК B60R 25/10 (2006.010, опубликовано 20.03.2009], содержащая связанные друг с другом посредством сотовой связи, например, GSM-сети, абонентские комплексы подвижных объектов, комплексы реагирования и диспетчерский пункт, при этом каждое транспортное средство (подвижный объект) содержит радиомаяк и блок ретрансляции, выполненный с возможностью приема сигналов от радиомаяков других подвижных объектов. Радиомаяк каждого подвижного объекта выполнен с возможностью излучения сигналов со случайно изменяющейся несущей частотой, например, хоппинг-сигналов, а приемник блока ретрансляции подвижного объекта с возможностью обработки указанных сигналов.
Недостатком описанной системы является сложность в практической и организационной реализации.
Близкой к изобретению по части идентификации объектов являются система для дистанционного контроля за мусорными контейнерами по патенту RU №2490197, (опубликовано 20.08.2013) и блок идентификации для мусорного контейнера по патенту DE №2040452 (опубликовано 25.07.1995).
Известна система для дистанционного контроля за мусорными контейнерами, содержащими блок идентификации, имеющими корпус с фланцевым элементом жесткости или выступом и датчиком системы опознавания, взаимодействующей с бортовой системой идентификации, автомобиля-мусоросборщика, расположенной на разгрузочном или засыпном устройстве, опорожняемыми с помощью разгрузочных или засыпных устройств в автомобиль-мусоросборщик с возможностью взвешивания на разгрузочном или засыпном устройстве до и после процесса опорожнения для определения веса содержащегося в контейнере мусора, при этом во фланцевом элементе жесткости или выступе корпуса выполнено гнездо для размещения в нем датчика опознавания с возможностью закрытия последнего со всех сторон, система снабжена располагаемым на каждом из группы одновременно контролируемых мусорных контейнеров измерительно-передающим блоком, включающим в себя сигнальные датчики, приемник GPS-сигналов, блок преобразования информации, блок управления, дуплексер, приемо-передающую антенну, передатчик и приемник электромагнитного сигнала, а также автономный источник питания [RU 2381162 С1 МПК B65F 1/14, G08G 25/10, опубликовано 10.02.2010].
Недостатками указанных систем является ограниченная сфера применения (мусорные контейнеры), тогда как у заявляемого изобретения ограничений на тип идентифицируемых объектов нет.
Близкой к изобретению по части геопозиционирования является система навигации подвижного объекта с использованием спутниковой связи, включающая установленные на подвижном объекте навигационный приемник с антенной и вычислительный блок, а также диспетчерский пункт с персональным компьютером [RU №76153 U1, опубликовано 10.09.2008 и RU №2122239 С1, опубликовано 20.11.1998].
В системе безопасности, навигации и мониторинга (RU №2122239) транспортное средство (подвижный объект) связано с диспетчерским пунктом посредством радиоканала с использованием телефонной сотовой связи, транкинговой или космической радиосвязи. Существенным недостатком известной системы является невозможность работы диспетчерского пункта при получении информации от переносного запоминающего устройства, связанного с подвижным объектом. Кроме того, в известной системе не предусмотрены меры по защите аппаратуры подвижного объекта, что снижает надежность системы. Недостатком данной системы является и то, что диспетчер контролирует транспортное средство (подвижный объект), находясь непосредственно в диспетчерской, в которую стекается вся информация. Контролировать транспортное средство (подвижный объект) с другого иного места он не может. Минусом построения такой системы мониторинга является физическая привязка человека к компьютеру (диспетчерской).
Наиболее близкой к изобретению является система навигации, охраны и мониторинга подвижных объектов по патенту [RU №99643, опубликовано 20.11.2010], с использованием глобальной навигационной спутниковой системы, включая установленный на подвижном объекте навигационный двухсистемный ГЛОНАСС+GPS приемник с антенной и вычислительный блок, а также диспетчерский пункт с персональным компьютером, отличающаяся тем, что подвижный объект снабжен устройством для передачи информации по Wi-Fi, Bluetooth, 3-G, ИК и/или WiMax (LTE) каналам и переносным запоминающим устройством с возможностью его подключения к персональному компьютеру диспетчерского пункта, при этом последний снабжен приемником информации по Wi-Fi, Bluetooth, 3-G ИК и/или WiMax (LTE) каналам и устройством, считывающим информацию с переносного запоминающего устройства.
Однако в известной системе данные, которые передаются на диспетчерский пункт, не проверяются.
Технической проблемой является разработка системы учета, навигации и мониторинга объектов, в которой устранены отмеченные недостатки.
Технический результат - информационной составляющей и надежности системы путем обработки и накопления показаний датчиков и приборов.
Указанный технический результат достигается тем, что система учета, навигации и мониторинга подвижных и стационарных объектов с использованием устройства геопозиционирования содержит устройство глобальной навигационной спутниковой системы ГЛОНАСС и/или GPS, включающее в себя приемник с антенной и вычислительный блок, установленных на подвижный объект, RFID или UHF-метки, установленные на стационарных и подвижных объектах, считыватели RFID и UHF-меток, установленные на манипуляторе, устройство определения веса груза, загружаемого в подвижный объект, устройство сбора, передачи и отображения данных, устройство связи с диспетчерским пунктом, подключенное к ПК, пункт поверки данных объекта, оборудованный платформенными весами и RFID и UHF-считывателями, система содержит фото - и/или видеокамеры, которыми оборудованы объекты, система оборудована пунктом проверки данных объекта, информация с которого поступает на диспетчерский пункт для корректировки полученных данных с объекта, при этом пункт проверки оборудован стационарными платформенными весами для проверки перевозимого груза, причем расхождения суммарного веса объектов с общей массой перевозимого груза транспортным средством, распределяют между массами объектов пропорционально. В качестве подвижного объекта используют транспортное средство. Устройство глобальной навигационной спутниковой системы ГЛОНАСС и/или GPS установлено на объекте с возможностью подключения к его электрической цепи и/или имеет свой независимый и/или резервный источник питания. В качестве устройства сбора, передачи и отображения данных может быть использовано любое мобильное устройство (смартфон, планшетный персональный компьютер, ноутбук и др.) или стационарное устройство (персональный компьютер, неттоп и др.). В качестве канала связи с диспетчерским пунктом может быть Wi-Fi, Bluetooth, 3G, LTE, WiMAX, ИК, Интернет. Подвижный объект может быть снабжен модулем для оповещения о несанкционированном вскрытии подвижного объекта или груза, и передачи информации через каналы связи или службу коротких сообщений (SMS и MMS).
Наличие дополнительного пункта проверки данных, оборудованного весами для проверки массы перевозимого мусора, позволяет повысить информационную составляющую заявляемой системы, при этом осуществляют фотофиксацию загрузки и дополнительно фиксируют вес, а полученные данные дополнительно проверяют.
Задача мониторинга подвижных объектов решается путем использования глобальной навигационной спутниковой системы ГЛОНАСС и/или GPS. Для подключения к указанным навигационным системам используется устройство геопозиционирования, включающее в себя приемник с антенной и вычислительный блок. Данное устройство может работать, как с одной системой навигации, так и с возможностью переключения между системами навигации или одновременного использования обеих.
Задача навигации подвижных объектов решается путем использования устройства геопозиционирования и устройства сбора, передачи и отображения данных (далее ПК) о маршруте движения, состояния агрегатов, грузе, показания видеокамер, текущего местоположения и другой информации. В качестве ПК может быть использовано любое мобильное устройство (смартфон, планшетный персональный компьютер, ноутбук и др.) или стационарное устройство (персональный компьютер, неттоп и др.) с собственным источником питания с возможностью подзарядки из электрической сети подвижного объекта или подключенное к электрической сети объекта. В ПК вносится предполагаемый маршрут движения объекта посредством ввода контрольных точек на ПК или посредством загрузки информации о маршруте с переносного устройства или посредством передачи из диспетчерского пункта информации о маршруте движения на устройство связи, подключенное к ПК, по каналу связи (Wi-Fi, Bluetooth, 3G, LTE, WiMAX, ИК, Интернет и др.), и ПК сравнивает показания устройства геопозиционирования с загруженным маршрутом. В случае отклонения объекта от маршрута, производится оповещение оператора диспетчерского пункта и/или оператора объекта.
Задача учета стационарных объектов решается путем установки на них меток RFID или UHF любого типа или меток штрихкода и оборудования манипуляционного устройства, которое перемещает или выполняет загрузку, или разгрузку стационарного объекта, считывателем RFID-меток или считывателем штрихкодов. Вместо считывателя на манипуляционном устройстве может быть использован любой другой тип считывателя. Метка может быть установлена в любом месте стационарного объекта, где считывателю будет возможность считать с нее информацию. Дополнительно может передаваться информация о текущем местоположении стационарного объекта и других его параметрах. Считыватель меток может быть установлен в другом месте.
Задача учета подвижных объектов решается либо таким же способом, как и задача идентификации стационарных объектов (метка - считыватель), либо путем хранения уникального ключа на ПК и передаче его на диспетчерский пункт в момент связи. Помимо идентификации подвижного объекта может производиться идентификация оператора данного объекта посредством считывания биометрических показателей оператора на биометрическом считывателе, подключенном к ПК либо посредством считывания меток или иных идентификаторов на специализированном устройстве так же подключенном к ПК.
Диспетчерский пункт может быть использован в случае необходимости автоматизированного сбора большого количества данных с различных устройств и объектов, например таких как информация о координатах загружаемых объектов, массе загружаемых объектов, фото-видео фиксации загружаемых объектов, о маршруте движения транспортного средства, в удобном для анализа и систематизации виде как для водителя транспортного средства, так и для прочих пользователей данной информации. Помимо координат, система передает различные параметры состояния транспорта: уровень топлива, заряд аккумулятора и прочее.
Пункт поверки данных объекта может быть использован в случае, если предоставляемая точность измерений и показаний устройств, установленных на объектах, выходит за пределы допустимых либо требование поверки показаний закреплено законодательством или иными нормативным актами. В данном случае дополнительный пункт проверки объекта оборудуется поверочными средствами контроля, которые корректируют поверяемые данные либо производят повторные измерения. Например, устанавливают стационарные весы и производится взвешивание мусоровоза вместе с загруженным мусором из контейнеров. Данный вес распределяется пропорционально между загруженными контейнерами на основании измерений, полученных при загрузке контейнеров.
При необходимости возможна установка фото - или видеокамер на объект или манипулятор для фиксации каких-либо процессов и/или дополнительной идентификации объектов.
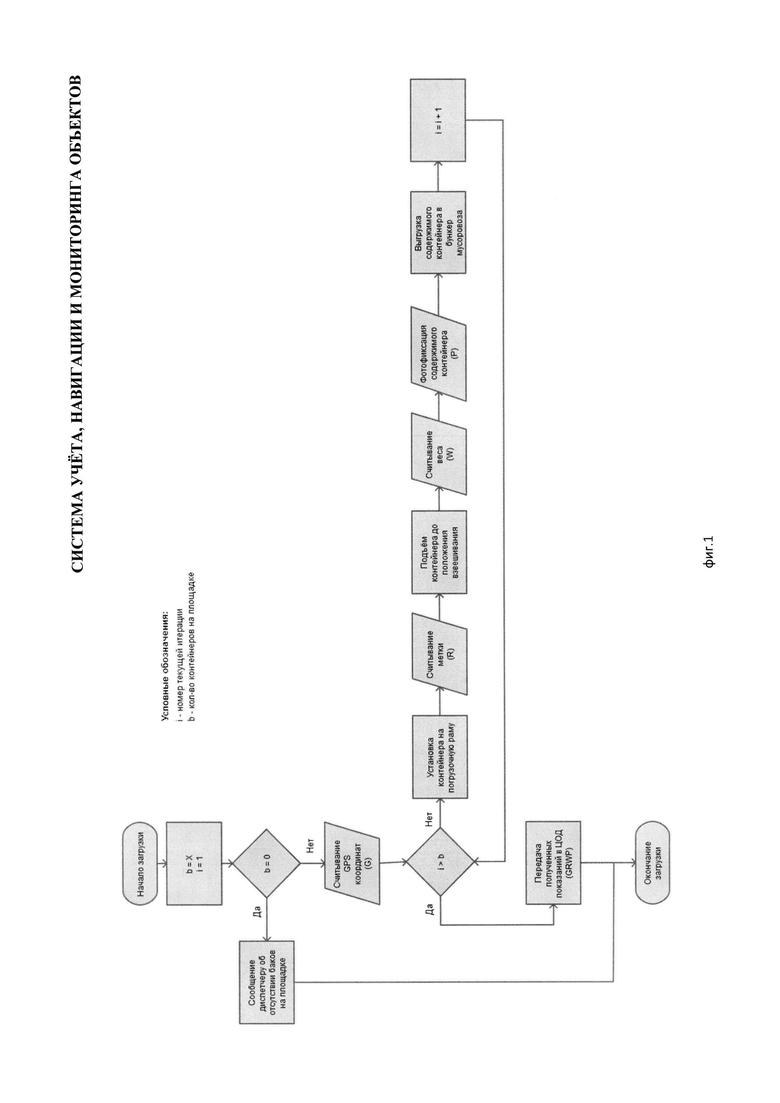
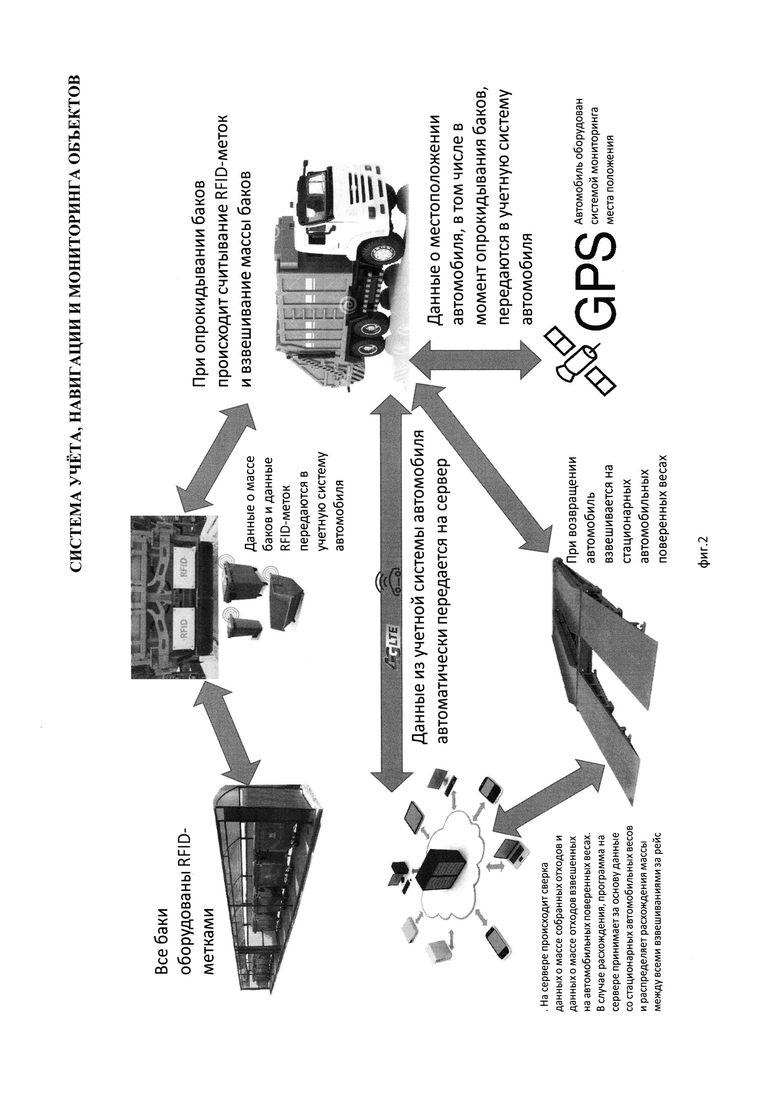
На фиг. 1 представлен алгоритм контроля загрузки и выгрузки содержимого контейнеров, на фиг. 2 схематично показано реализация назначения заявляемой системы.
Пример возможной реализации заявляемого технического решения.
На площадке находятся 4 контейнеры с твердыми коммунальными отходами, каждый контейнер имеет свой идентификатор RFTD или UHF и GPS - координаты местоположения. Пока мусоровоз двигается от гаража до данной площадки, комплекс программных продуктов периодически собирает данные о местоположении и состоянии мусоровоза.
По прибытии на площадку с контейнерами, мусоровоз занимает местоположение, пригодное для загрузки контейнеров. Далее операторы мусоровоза цепляют контейнеры к подъемной раме и начинают подъем контейнеров для загрузки содержимого в бункер мусоровоза. В момент начала подъема контейнера, считывателем RFID и UHF - меток считывает идентификатор контейнера.
После преодоления подъемной рамой определенного положения, происходит взвешивание контейнера устройством измерения веса на основании изменений давления в гидроцилиндрах. После успешного взвешивания происходит фотофиксация содержимого контейнера.
Фотофиксация осуществляется с помощью установленной над подъемной рамой фото или видеокамеры.
В завершении подъема, контейнер выгружается в бункер и возвращается в начальное положение пустым. Все полученные данные за этот цикл передаются на главный сервер. Все баки оборудованы RFID-метками. Данные о массе баков и данные RFID-меток передаются в учетную систему автомобиля, при опрокидывании баков происходит считывание RFID - меток и взвешивание массы баков. Данные о местоположении автомобиля, в том числе в момент опрокидывания баков, передаются в учетную систему. Транспортное средство - автомобиль оборудован системой мониторинга места положения. Данные из учетной системы автомобиля автоматически передается на сервер. На сервере происходит сверка данных о массе собранных отходов и данных о массе отходов взвешенных на автомобильных поверенных весах. В случае расхождения, программа на сервере принимает за основу данные со стационарных автомобильных весов и распределяет расхождения массы между всеми взвешиваниями за рейс. При возвращении, автомобиль взвешивается на стационарных автомобильных поверенных весах. Данный процесс повторяется для каждого контейнера на площадке. По завершению загрузки всех контейнеров, мусоровоз отправляется к следующей площадке или направляется на полигон ТБО для выгрузки.
Если у передатчика нет связи с сервером, то благодаря алгоритму и устройству накопления данных может накапливаться огромное количество показаний GPS-маячка, чтобы затем передать полученные показания на сервер, когда появится с ним устойчивый канал связи, причем на сервер они будут приходить не с текущей датой, а с той датой, когда было получено измерение.
Система взвешивания применена в гидроцилиндрах подъемного устройства типа «Пегас», взвешивание производится сначала полного контейнера, затем пустого.
На подъемном устройстве располагают выключатель типа «концевик», который включает систему при начале подъема контейнера в мусоровоз.
Концевик включает систему, которая одновременно включает: весы в гидросистеме, считыватель, расположенный на подъемном устройстве, на считывание метки на контейнере, в метку записана информация о контейнере: координаты нахождения контейнера, т.е. где он должен находиться, его идентифицирующие данные (номер, масса, собственник), фото камеру, устройство навигации автомобиля, которое передает в систему текущие координаты транспортного средства.
Все четыре показателя информации о контейнере обрабатываются «головным устройством» автомобиля (в виде планшета с сим-картой) и посылаются через канал связи 3G в диспетчерскую службу.
При обработке данных веса контейнеров, когда загружено максимально допустимое значение грузоподъемности мусоровоза - головное устройство сообщает водителю о загрузке и необходимости движения на базу.
При обработке данных координат контейнера происходит сверка фактических данных месторасположения контейнера с базой данных, где он должен находится (поиск украденных или не санкционированно перенесенных в другое место контейнеров).
Камера фотографирует содержимое контейнера. Одновременно камера захватывает и окружающую местность, где располагается контейнер.
На автомобиле монтируется четыре камеры:
- впереди автомобиля располагается в салоне, при этом захватывает и действия водителя.
- сзади автомобиля и по бокам.
С камерами связана функция и кнопка на экране головного устройства «препятствие к проезду», т.е. в случае наличия затруднения в проезде «пробки» или подъезд к контейнерам заблокирован припаркованными авто или другими препятствиями.
Водитель нажимает кнопку «препятствие к проезду», срабатывают все четыре фото камеры по периметру автомобиля, и информация с фото передается в диспетчерский пункт, при этом, если препятствие может устранить владелец контейнера (управляющая компания, ТСЖ) диспетчер делает звонок собственнику контейнера и посылает сообщение на головное устройство автомобиля водителю об ожидании.
В случае наличия «пробки» на пути к объекту, после получения сигнала от водителя «препятствие к проезду», диспетчер изменяет маршрут другого автомобиля, который может добраться к контейнерам без затруднений, и соответственно меняет маршрут автомобиля подавшего сигнал «препятствие к проезду».
Данная функция осуществляется за счет одновременной связи между всеми автомобилями и диспетчерской службой в режиме онлайн по средствам 3G технологии.
Заявляемая система может быть внедрена как полностью, так и с ограниченным набором функциональных возможностей: учет контейнеров, а также их веса, которые поднимает погрузчик (фронтальный погрузчик, боковой погрузчик, мусоровоз и подобные транспортные средства), параллельно учитывая состояние и местоположение погрузчика.
Изобретение может быть использовано в качества охранной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ЗАБОРА И ЗАГОТОВКИ КРОВИ | 2011 |
|
RU2470801C1 |
| Система контроля и мониторинга маршрутизированных автотранспортных средств | 2018 |
|
RU2712404C2 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| Информационно-аналитическая система мониторинга деятельности судов рыбопромыслового флота, контроля улова, переработки и перемещения водных биологических ресурсов и производимой из них продукции | 2021 |
|
RU2785222C1 |
| НАВИГАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2007 |
|
RU2365061C2 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| Информационно-технологический комплекс управления и контроля на маршрутизированном пассажирском транспорте | 2023 |
|
RU2819665C1 |
Изобретение относится к системам навигации, мониторинга и учета транспортных средств и стационарных объектов. Технический результат заключается в расширении арсенала технических средств для учета, навигации и мониторинга подвижных объектов с использованием глобальной навигационной спутниковой системы. Технический результат достигается за счет системы учета, навигации и мониторинга подвижных объектов с использованием глобальной навигационной спутниковой системы, включающей установленный на подвижном объекте навигационный двухсистемный ГЛОНАСС+GPS приемник с антенной и вычислительный блок, а также диспетчерский пункт с персональным компьютером, подвижный объект снабжен устройством для передачи информации по беспроводным каналам и переносным запоминающим устройством с возможностью его подключения к персональному компьютеру диспетчерского пункта, при этом последний снабжен приемником информации по беспроводным каналам и устройством, считывающим информацию с переносного запоминающего устройства, пункт проверки данных объекта, информация с которого поступает на диспетчерский пункт для корректировки полученных данных с объекта, при этом пункт проверки оборудован стационарными платформенными весами для проверки перевозимого груза. 1 з.п. ф-лы, 2 ил.
1. Система учета, навигации и мониторинга подвижных объектов с использованием глобальной навигационной спутниковой системы, включая установленный на подвижном объекте навигационный двухсистемный ГЛОНАСС+GPS приемник с антенной и вычислительный блок, а также диспетчерский пункт с персональным компьютером, подвижный объект снабжен устройством для передачи информации по Wi-Fi, Bluetooth, 3-G, ИК и/или WiМах (LТЕ) каналам и переносным запоминающим устройством с возможностью его подключения к персональному компьютеру диспетчерского пункта, при этом последний снабжен приемником информации по Wi-Fi, Bluetooth, 3-G ИК и/или WiМах (LTE) каналам и устройством, считывающим информацию с переносного запоминающего устройства, отличающаяся тем что дополнительно содержит пункт проверки данных объекта, информация с которого поступает на диспетчерский пункт для корректировки полученных данных с объекта, при этом пункт проверки оборудован стационарными платформенными весами для проверки перевозимого груза, причем расхождения суммарного веса объектов с общей массой перевозимого груза транспортным средством, распределяют между массами объектов пропорционально.
2. Система по п. 1, отличающаяся тем, что подвижный объект снабжен модулем для оповещения о несанкционированном вскрытии подвижного объекта или груза, и передачи информации через каналы связи или службу коротких сообщений (SМS и ММS).
| Устройство для связи измерительного прибора, помещенного в герметически закрытом сосуде, с подвижной частью указательного прибора | 1952 |
|
SU99643A1 |
| СИСТЕМА КОНТРОЛЯ ЗА ПЕРЕМЕЩЕНИЕМ И СОСТОЯНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2305327C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА БЕЗОПАСНОСТИ ТРАНСПОРТИРОВАНИЯ СПЕЦИАЛЬНЫХ ГРУЗОВ | 2014 |
|
RU2564939C1 |
| Прибор для измерения остаточных деформаций плоских пружин | 1949 |
|
SU80259A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

