Экологический дирижабль является летательным управляемым аппаратом, который относится к воздушным судам легче воздуха и поддерживаемым в атмосфере статическим давлением воздуха, а при принудительном движении- также и аэродинамической подвижной силой, которая позволяет при помощи горизонтальных и вертикальных рулей менять высоту и направление полета. Он предназначен для ведения дистанционного экологического мониторинга линейно-протяженных техногенных транспортно-коммуникационных сооружений: магистральных и межпромысловых нефте-, газо- и продуктопроводов, а также железнодорожных и автомобильных магистралей, линий электропередач и других объектов, в том числе и природных.
Известны дирижабли (патенты РФ №2.185.999, 2.307.762, 2.311.319, 2.362.981, 2.532.301, 2.621.406; патент США №4.089.492; патент Германии № 1.962.151; патент ЕР № 0.771.729; патент WO № 2.011/012.138 и другие).
Из известных устройств наиболее близким к предлагаемому явлению «Экологический дирижабль» (патент РФ №2.621.406, B64В 1/06, 2016), который и выбран в качестве прототипа.
Известный дирижабль имеет аппаратуру оперативной двухсторонней связи между дирижаблем и исследовательским центром с использованием двух частот и сложных сигналов с фазовой манипуляцией, что повышает надежность и достоверность обмена дискретной информации.
Известный дирижабль обеспечивает повышение избирательности, помехоустойчивости и надежности дуплексной радиосвязи между дирижаблем и исследовательским центром путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам. При этом для подавления ложных сигналов (помех), принимаемых по дополнительным каналам, используются оригинальные схемные конструкции, состоящие из гетеродинов, смесителей и фильтров нижних частот, и выполняющие одновременно роли преобразователей частоты и синхронных демодуляторов принимаемых сложных Фмн сигналов. А системы ФАПЧ обеспечивают автоматическое сложение за изменениями несущих частот принимаемых сложных Фмн сигналов, которые могут возникать над влиянием различных дестабилизирующих факторов, в том числе и эффекта Доплера.
Приемники GPS-сигналов, размещенные на дирижабле и исследовательском центре, построены по классической схеме и содержат последовательно включенную приемную антенну 1(19), усилитель 51 высокой частоты, смеситель 54, второй вход которого соединен с выходом гетеродина 53, усилитель 55 промежуточной частоты, удвоитель 57 фазы, делитель 58 фазы на два, узкополосный фильтр 59 и фазовый детектор 60, второй вход которого соединен с выходом усилителя промежуточной частоты, а выход является выходом приемника GPS-сигналов.
В преобразователе частоты 52, состоящим из гетеродина 53, смесителя 54 и усилителя 55 промежуточной частоты, одно и то же значение промежуточной частоты ωпр может быть получено в результате приема сигналов на двух частотах ωs и ωз, т.е.
ωпр=ωs-ωr и ωпр =ωr-ωз.
Следовательно, если частоту настройки ωs принять за основной канал приема, то наряду с ним будет иметь место зеркальный канал приема, частота ωз которого отличается от частоты ωs на 2ωпр и расположена симметрично (зеркально) относительно частоты ωr гетеродина (фиг.4). Преобразование по зеркальному каналу приема происходит с тем же коэффициентом преобразования Kпp, что и по основному каналу. Поэтому он наиболее существенно влияет на избирательность и помехоустойчивость преобразователя частоты.
Кроме зеркального существуют и другие дополнительные (комбинационные) каналы приема. В общем виде любой комбинационный канал приема имеет место при выполнении условия:
ωпр =|± mωki ± nωr|,
где ωki –частота i-го комбинационного канала приема,
m, n, i – целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующиеся при взаимодействии первой гармоники частоты сигнала с гармониками частоты гетеродина малого порядка (второй, третий), так как чувствительность преобразователя частоты по этим каналам близка к чувствительности основного канала. Так, двум комбинационным каналам приема при m=1 и n=2 соответствуют частоты:
ωk1=2ωr-ωпp и ωk2=2ωr+ωпp.
Демодулятор сложных ФМн сигналов, состоящий из удвоителя 57 фазы, делителя фазы на два 58, узкополостного фильтра 59 и фазового детектора 60, построен по схеме Пистолькорса А.А., в нем опорное напряжение, необходимое для демодуляции GPS-сигналов, выделяется непосредственно из самого принимаемого GPS-сигнала.
Однако указанному демодулятору GPS-сигналов присуще явление «обратной работы», которое обусловлено неопределённостью начальной фазы опорного напряжения, выделяемого непосредственно из принимаемого GPS-сигнала. При равновероятных значениях переменной составляющей фазы GPS-сигнала ϕk(t)={ϕ,π} отсутствует признак, который позволил бы «привязать» фазу опорного напряжения ϕпp к одной из фаз GPS-сигнала. Поэтому фаза опорного напряжения всегда имеет два устойчивых состояния: ϕпp и ϕпp+π.
Явление «обратной работы» обусловлено скачкообразными переходами фазы опорного напряжения из одного состояния ϕпp в другой ϕпp+π под воздействием помех, кратковременного прекращения приема и других дестабилизирующих факторов. Эти переходы за время приема GPS-сигналов могут происходить в случайные моменты времени.
Наличие ложных сигналов (помех), принимаемых по дополнительным каналам, и явления «обратной работы» проводят к снижению помехоустойчивости и достоверности определения местоположения дирижабля и исследовательского центра.
Технической задачей изобретения является повышение помехоустойчивости и достоверности определения местоположения дирижабля и исследовательского центра путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам, и устранения явления «обратной работы» в приемниках GPS-сигналов.
Постановленная задача решается тем, что в дирижабле, содержащем, в соответствии с ближайшим аналогом, корпус с несколькими отсеками, заполненными несущим газом легче воздуха, гондолу с двигателями, топливными баками, кабиной управления, салонами для экипажа и наблюдателями-исследователей, приборы дистанционного зондирования земной поверхности и атмосферы для лазерного зондирования, видео-, кино- и аэрофотосъёмки в различных спектральных диапазонах: видимом, инфракрасном и ультрафиолетовом, откидные и выносные устройства – пробоотборники воздуха, воды и почвы, устройства посадки на неподготовленные участки Земли и водной поверхности и высадки групп исследователей – экологов и ликвидаторов, лабораторное оборудование для получения, обработки и анализа проб воздуха, воды, почв, подпочвенных грунтов, донных отложений, торфа, растительности, а также газоанализаторы, масс-спектрометры, спектрографы, хроматографы, аппаратуру точной координатной привязки по спутниковой информации, аппаратуру оперативной двусторонней связи с другими воздушными, космическими, наземным, морскими и речными исследовательскими центрами, а также обмена в результатами наблюдений в режиме реального времени, при этом аппаратура оперативной двусторонней связи на дирижабле и каждом исследовательском центре выполнена в виде фазового детектора, блока регистрации и последовательно включенных приемной антенны, приемника GPS- сигналов, контроллера, второй вход которого соединен с выходом приборов дистанционного зондирования земной поверхности и атмосферы, фазового манипулятора, второй вход которого соединен с первый выходом задающего генератора, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, антенного переключателя, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности и второго смесителя, второй вход которого соединен с выходом второго гетеродина, фильтра нижних частот, перемножителя, второй вход которого соединен с выходом второго усилителя мощности, и фазового детектора, второй вход которого через фазовращатель на 90° соединен с выходом второго гетеродина, а выход подключен к управляющему входу второго гетеродина, вход блока регистрации соединен с выходом фильтра нижней частоты, частоты ωr1 и ωr2 гетеродинов выбраны равными несущим частотам ω1 и ω2 принимаемых сложных сигналов с фазовой манипуляцией ωr1=ω1 и ωr2=ω2 и указанные равенства поддерживаются с помощью систем фазовой автономической подстройкой частот ωr1 и ωr2 гетеродинов, отличается от ближайшего аналога тем, что что каждый приемник GPS-сигналов выполнен в виде последовательно подключённых к выходу приемной антенны усилителя высокой частоты, смесителя, второй вход которого соединен с первым выходом гетеродина, фильтра нижних частот, перемножителя, второй вход которого соединен с выходом усилителя высокой частоты, и фазового детектора, второй вход которого через фазовращатель на 90° соединен с выходом гетеродина, а выход подключен к управляющему входу гетеродина, вход контроллера соединен с выходом фильтра нижних частот, частота ωr гетеродина выбрана равной нижней частоте ωs принимаемых сложных GPS-сигналов ωr= ωs и указанное равенство поддерживается с помощью системы фазовой автоматической подструктуры частоты ωr гетеродина.
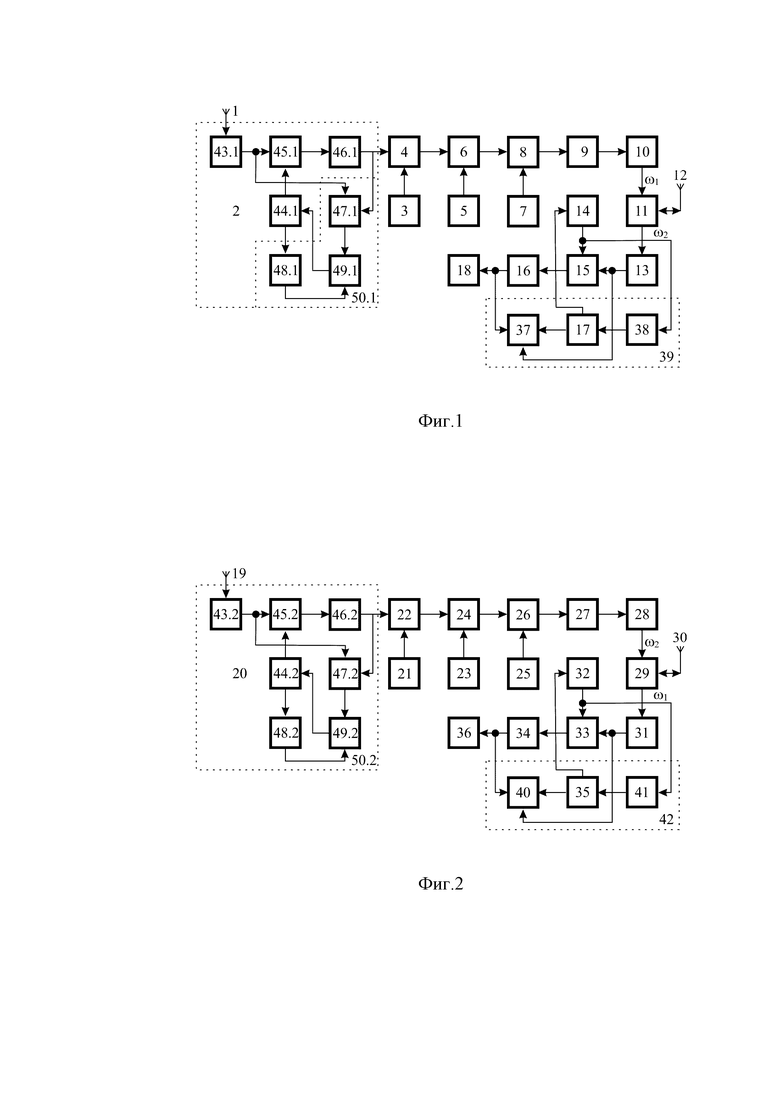
Структурная схема аппаратуры, размещенной на дирижабле, представлена на фиг.1. Структурная схема аппаратуры, размещенной на каждом воздушном, космическом, наземном, морском и речном исследовательском центре, представлена на фиг.2. Структурная схема классического приемника GPS-сигналов изображена на фиг.3. Частотная диаграмма, иллюстрирующая образование дополнительных каналов приема, изображена на фиг.4.
Аппаратура, размещенная на дирижабле (исследовательском центре), содержит последовательно включенные приемную антенну 1(19), приемник 2 (20) GPS- сигналов, контролер 4(22), второй вход которого соединен с выходом приборов 3(21) дистанционного зондирования земной поверхности и атмосферы, фазового манипулятор 6(24), второй вход которого соединен с первый выходом задающего генератора 5(23), первый смеситель 8(26), второй вход которого соединен с выходом первого гетеродина 7(25), усилитель 9(27) первой промежуточной частоты, первый усилитель 10(28) мощности, антенный переключатель 11(29), вход-выход которого связан с приемопередающей антенной 12(30), второй усилитель13(31) мощности, второй смеситель 15(33), второй вход которого соединен с выходом второго гетеродина 14(32), фильтр 16 (34) нижних частот, перемножитель 37(40), второй вход которого соединен с выходом второго усилителя 13(31) мощности, и фазовый детектор 17(35), второй вход которого через фазовращетель 38(41) на 90° соединен с выходом второго гетеродина 14(32), а выход соединен с управляющим входом второго гетеродина 14(32), вход блока регистрации 18(36) соединен с выходом фильтра 16(34) нижних частот.
Перемножитель 37(40), фазовый детектор 17(35) и фазовозращатель 38(41) на 90° образуют систему 39(42) ФАПЧ.
Каждый приемник 2(20) GPS-сигналов содержит последовательно подключенные к выходу приемной антенны 1(19) усилитель 43.1(43.2) высокой частоты, смеситель 45.1(45.2), второй выход которого соединен с первым выходом гетеродина 44.1(44.2), фильтр 46.1(46.2) нижних частот, перемножитель 47.1(47.2), второй вход которого соединен с выходом усилителя 43.1(43.2) высокой частоты, фазовый детектор 49.1(49.2), второй вход которого через фазовращатель 48.1(48.2) соединен со вторым выходом гетеродина 44.1(44.2), а выход подключен к управляющему входу гетеродины 44.1(44.2), перемножитель 47.1(47.2), фазовращатель 48.1(48.2) и фазовый детектор 49.1(49.2) образуют систему 50.1(50.2) ФАПЧ.
Примером конкретного исполнения дирижабля является дирижабль, у которого жесткий каркас обтянут мягкой оболочкой с несколькими отсеками, заполненными несущим газом легче воздуха (водород, гелий, метан, пары воды). Система управления имеет горизонтальные и вертикальные рули. Подвесная гондола снабжена двигателем, топливными баками, а также кабиной управления, салонами для экипажа и операторов-наблюдателей. Имеется рабочий технический отсек с приборами наблюдения и бортовой химической экспресс-лабораторией.
Оптимальные диапазоны параметров его таковы. Объем корпуса 2000-10000 м3. Длина дирижабля 25-50 м, а его наибольший диаметр 8-15 м. число газовых отсеков 5-10 штук. Подъемная сила достигает 1,6-8 т. Масса воздушного корабля 1,2-5 т. Чистая подъемная сила составляет 0,4-3 т.
Особенно эффективен дирижабль для осуществления экологического патрулирования протяженных объектов: нефте-, газо-, продуктопроводов, транспортных магистралей, в том числе железнодорожных, автомобильных и водных. Его осуществляемость подтверждается тем, что дирижабли широко демонстрируются на международных авиационных выставках, а оснащение его экологической аппаратурой не представляет собой технической сложности.
Аппаратура оперативной двухсторонней связи работает следующим образом.
Приемник 2-GPS-сигналов с приемной антенной 1 обеспечивает прием сигналов глобальной навигационной системы GPS (Global Positioning System), известной также как Navstar. В состав данной системы входят космический сегмент, состоящий из 24 КА, сеть наземных станций наблюдения за их работой и пользовательский сегмент (навигационные приемники GPS-сигналов).
Принимаемый GPS-сигнал
Us(t)=UsCos[ωst+ϕk(t)+ϕs], 0 ≤ t ≤ Ts,
где ϕk(t)={0,π}-манипулируемая составляющая фазы GPS-сигнала, отображающая Закон фазовой манипуляции в соответствии с модулирующим кодом С/А, причем ϕk(t)=const при kτs<L<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1,2,…,N).
τэ,N -длительность и количество элементарных посылок, из которых состоит GPS-сигнал длительностью Ts(Ts=Nτэ), для кода С/А N=1023), с выхода приемной антенны 1 через усилитель 43.1 высокой частоты поступает на первый вход смесителя 45.1, на второй вход которого подается напряжение гетеродина 44.1 ur(t)=Urcos(ωrt+ϕr). Причем частота ωr гетеродина 44.1 выбирается равной частоте ωs, принимаемого GPS-сигнала (ωr= ωs). На выходе смесителя 45.1 образуется напряжение нулевой частоты Uн(t)=Uнсosϕk(t), 0≤t≤Ts, где UH=1/2UsUr, пропорционально модулирующему коду С/А.
Следует отметить, что выбор частоты ωr гетеродина 44.1 равной частоте ωs принимаемого GPS-сигнала (ωr= ωs), обеспечивает совмещение двух процедур: преобразование принимаемого GPS-сигнала на нулевую частоту и выделение низкочастотного UH(t), пропорционально модулирующему коду С/А, т.е. синхронное детектирование принимаемого GPS-сигнала с помощью гетеродина 44.1, смесителя 45.1 и фильтра 46.1 нижних частот. Такая схемная конструкция позволяет избавиться от дополнительных каналов приема (зеркального и комбинационных). Нет причин и для явления «обратной работы».
Так как частота ωs принимаемого GPS-сигнала может изменяться под воздействием различных дестабилизирующих факторов, в том числе и эффекта Доплера, то для выполнения и поддержания равенства ωr= ωs используемого система 50.1 ФАПЧ, состоящая из перемножителя 47.1, фазовращателя 48.1 на 90° и фазового детектора 49.1.
Аналогичным образом работает и приемник 20 GPS-сигналов, размещенный на каждом исследовательском пункте.
Информация о местонахождении дирижабля с выхода приемника 2-GPS-сигналов поступает на первый вход контроллера 4, на второй вход которого подается информация с выхода приборов 3 дистанционного зондирования земной поверхности и атмосферы для лазерного зондирования, видео-, кино- и аэрофотосъемки в различных диапазонах: видимом, инфракрасном и ультрафиолетовом.
Контроллер 4 формирует моделирующий код М1(t), содержащий информацию о местонахождении дирижабля и о результатах дистанционного зондирования земной поверхности и атмосферы. Указанный код поступает на первый вход фазового манипулятора 6, на второй вход которого с первого выхода задающего генератора 5 подается высокочастотное колебание
Uc1(t)= Uc1cos(ωct+ϕc1), 0≤t≤Tc1,
где Uc1, ωc, ϕc1, Tc1 – амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
На выходе фазового манипулятора 6 образуется сложный сигнал с фазовой манипуляцией (ФМн)
u1(t)= Uc1cos[ωct+ϕk1(t) +ϕc1], 0<t<Tc1,
где ϕk1(t)={O,π}- манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М1(t), причем ϕk1(t)=const при kτэ<t<(k+1)kτэ и может измениться скачком при t=kτэ, т. е. на границах между элементарными посылками (k=1,2,…, N-1);
τэ, N – длительность и количество элементарных посылок, их которых составлен сигнал длительностью Tc1(Tc1=Nτэ), который поступает на первый вход первого смесителя 8, на второй вход которого подается напряжение первого гетеродина 7
ur1(t)= Ur1cos(ωr1t+ϕr1).
На выходе смесителя 8 образуются напряжения комбинационных частот. Усилителем 9 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)= Uпр1[ωпр1t+ϕk1(t) +ϕпр1], 0<t<Tc1,
где Uпр1=1/2K1Uc1Ur1;
К1 – коэффициент передачи смесителя;
ωпр1 = ωс1+ ωr1- первая промежуточная (суммарная) частота;
ϕпр1=ϕс1 +ϕr1.
Это напряжение после усиления в усилителе 10 мощности через антенный переключатель 11 излучается приемопередающей антенной 12 в эфир на частоте ω1 = ωпр1, улавливается приемопередающей антенной 30 и через антенный переключатель 29 и усилитель 31 мощности поступает на первый вход смесителя 33. На второй вход смесителя 33 подается напряжение ur1(t) гетеродина 32.
Причем частота ωr1 второго гетеродина 32 выбирается равной частоте ω1 принимаемого сложного ФМн сигнала (ωr1=ω1). На выходе смесителя 33 образуются следующие напряжения:
u2(t)= UН1cosϕk1(t) + UН1cos[2ωпрt+ϕk1(t) +2ϕпр1],
где UН1=1/2K1Uпр1Ur1
Фильтром 34 нижних частот выделяется низкочастотное напряжение (напряжение нулевой частоты)
uН1(t)= UН1cosϕk1(t), 0<t<Tc1,
пропорциональное модулирующему коду М1(t). Это напряжение регистрируется блоком 36 регистрации.
Следует отметить, что выбор частоты ωГ1 гетеродина 32, равной частоте ω1 принимаемого сложного ФМн сигнала (ωr1=ω1), обеспечивает совмещение двух процедур: преобразование принимаемого сложного ФМн сигнала на нулевую частоту и выделение низкочастотного напряжения UН1(t), пропорционального модулирующему коду М1(t), т.е. синхронное детектирование принимаемого слжного ФМн сигнала с помощью гетеродина 32, смесителя 33 и фильтра 34 нижних частот. Такая схемная конструкция позволяет избавиться от дополнительных каналов приема (зеркальных и комбинационных).
Так как частота ω1 принимаемого сложного ФМн сигнала может изменяться под воздействием различных дестабилизирующих факторов, в том числе и эффекта Доплера, то для выполнения и поддержания равенства ωr1=ω1 используется система 42 ФАПЧ, состоящая из перемножителя 40, фазовращателя 41 на 90° и фазового детектора 35.
При передаче сообщений с исследовательского центра с помощью задающего генератора 23 формируется высококачественное колебание
uc2(t)=Uc2cos(ωct+ϕc1), 0≤t≤Tc2,
которое поступает на второй вход фазового манипулятора 24. На первый вход последнего подается модулирующий код M2(t) с выхода контроллера 22. Модулирующий код M2(t) содержит сведения о местоположении исследовательского центра и результаты дистанционного зондирования земной поверхности и атмосферы. На выходе фазового манипулятора 24 формируется сложный ФМн сигнал
u2(t)=Uc2cos[ωct+ϕk2(t)+ϕc2], 0≤t≤Tc2,
который поступает на первый вход смесителя 26,на второй выход которого подается напряжение гетеродина 25
uг2(t)=Uг2cos(ωг2t+ϕг2).
На выходе смесителя 26 образуются напряжения комбинационных частот. Усилителем 27 выделяется напряжение промежуточной частоты
uпр(t)=Uпрcos[ωпрt+ϕk2(t)+ϕпр], 0≤t≤Tс2,
где Uпр = 1/2 K1Uc2Uг2;
ωпр=ωг2-ωc=ω2 – промежуточная частота;
ϕпр=ϕг2-ϕс2.
Это напряжение после усиления в усилителе 28 мощности через антенный переключатель 29 излучается приемопередающей антенной 30 в эфир на частоте ω2=ωпр, улавливается приемопередающей антенной 12 и через антенный переключатель 11 и усилитель 13 мощности поступает на первый вход смесителя 15, на второй вход которого подается напряжение гетеродина 14
uг2(t)=Uг2cos(ωг2t+ϕг2).
Причем частота ωг2 гетеродина 14 выбирается равной частоте ω2 принимаемого сложного ФМн сигнала (ωг2=ω2). На выходе смесителя 15 образуются следующие напряжения
u3(t)=Uн2cosϕk2(t)+Uн2cos[2ωпрt+ϕk2 (t)+2ϕпр2],
где UH2 = 1/2K1Uпр2UГ2 .
Фильтром 16 нижних частот выделяется низкочастотное напряжение (напряжение нулевой частоты)
uH2(t)=UH2cosϕk2(t), 0≤t≤Tc2,
пропорциональное модулирующему коду M2(t). Это напряжение регистрируется блоком 18 регистрации.
В этом случае для выполнения и поддержания равенства ωг2=ω2 используется система 39 ФАПЧ, состоящая из перемножителя 37, фазовращателя 38 на 90º и фазового детектора 17.
Предлагаемый дирижабль обеспечивает повышение надежности и достоверности обмена дискретной информацией между экологическим дирижаблем и исследовательским центром. Это достигается использованием двух частот и сложных сигналов с фазовой манипуляцией.
Указанные сигналы открывают новые возможности в технике передачи сообщений. Они позволяют применять новый вид селекции – структурную селекцию.
С точки зрения обнаружения сложные сигналы с фазовой манипуляцией обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных сигналов с фазовой манипуляцией обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Предлагаемый экологический дирижабль обеспечивает повышение эффективности дуплексной радиосвязи между дирижаблем и исследовательским центром. Это достигается за счет выбора частот ωг1 и ωг2 гетеродинов равными несущим частотам ω1 и ω2 принимаемых сложных сигналов с фазой манипуляцией ωг1=ω1 и ωг2=ω2 и автоматического поддержания указанных равенств с помощью систем ФАПЧ.
Причем подавление ложных сигналов (помех), принимаемых по дополнительным каналам, происходит за счет преобразования принимаемых сложных ФМн сигналов на нулевую частоту. Указанное преобразование позволяет также выделять модулирующие коды из принимаемых сложных ФМн сигналов, т.е. синхронное их детектирование. Совмещение двух указанных процедур обеспечивается гетеродинами, смесителями и фильтрами нижних частот, которые одновременно выполняют роли преобразователей частоты и синхронных демодуляторов принимаемых сложных ФМн сигналов. Такие схемные конструкции свободны от дополнительных каналов приема, а системы ФАПЧ обеспечивают автоматическое слежение за изменениями несущих частот принимаемых сложных ФМн сигналов, которые могут возникать под влиянием различных дестабилизирующих факторов, в том числе и эффекта Доплера.
Таким образом, предлагаемый экологический дирижабль по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение помехоустойчивости и достоверности определения местоположения дирижабля и исследовательского центра. Это достигается подавлением ложных сигналов (помех), принимаемых по дополнительным ( зеркальному и комбинационным) каналам, и устранением явления «обратной работы» за счет выбора частоты ωr гетеродина равной несущей частоты ωs принимаемых GPS-сигналов (ωr=ωs) и автоматического поддержания указанного равенства с помощью системы ФАПЧ.
Причем подавление ложных сигналов (помех), принимаемых по дополнительным каналам, происходит за счет преобразования принимаемых GPS-сигналов на нулевую частоту. Указанное преобразование позволяет также выделять модулирующий код С/А из принимаемых GPS-сигналов, т.е. синхронное их детектирование. Совмещение двух указанных процедур также обеспечивается гетеродином, смесителем и фильтром нижних частот, которые одновременно выполняют роли преобразователей частоты и синхронных демодуляторов GPS-сигналов. Такие схемные конструкции свободны от дополнительных каналов приема и явления «обратной работы», а системы ФАПЧ, обеспечивают автоматическое слежение за изменениями несущей частоты принимаемых GPS-сигналов, которые могут возникать под воздействием различных дестабилизирующих факторов, в том числе и эффекта Доплера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры | 2019 |
|
RU2733054C1 |
| Спутниковая система для определения местоположения судов и самолетов, потерпевших аварию | 2019 |
|
RU2723443C1 |
| Система контроля соблюдения правил дорожного движения | 2019 |
|
RU2725101C1 |
| Устройство контроля параметров движения транспортного средства | 2019 |
|
RU2741668C1 |
| Когерентная радиолиния | 2019 |
|
RU2735923C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2019 |
|
RU2722518C1 |
| Система дистанционного контроля за транспортировкой высокотехнологичных строительных модулей | 2018 |
|
RU2699451C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| ЭКОЛОГИЧЕСКИЙ ДИРИЖАБЛЬ | 2016 |
|
RU2621406C1 |
| Способ контроля подлинности и перемещения сельскохозяйственной продукции и система для его реализации | 2019 |
|
RU2716905C1 |

Дирижабль предназначен для ведения дистанционного экологического мониторинга линейно-протяженных техногенных транспортно-коммуникационных сооружений. Дирижабль содержит приемную антенну 1(19) приемник 2(20) GPS-сигналов, приборы 3(21) дистанционного зондирования земной поверхности и атмосферы, контроллер 21(22), задающий генератор 5(23), фазовый манипулятор 6(24), первый гетеродина 7(25), первый смеситель 8(26), усилитель 9(27) первый промежуточный частоты, первый усилитель 10(28) мощности, антенный переключатель 11(29), приёмопередающую антенну 12(30), второй усилитель 13(31) мощности, второй гетеродин 14(32), второй смеситель 15(33), фильтр 16(34) нижних частот, фазовый детектор 17(35), блок 18(36) регистрации, перемножитель 37(40), фазовращатель 38(41) на 90°, системы 39(42) ФАПЧ. Приемник 2(20) GPS-сигналов содержит усилитель 43.1(43.2) высокой частоты, гетеродин 44.1(44.2), смеситель 45.1(45.2), фильтр 46.1(46.2) нижних частот, перемножитель 47.1(47.2), фазовращатель 48.1(48.2) на 90°, фазовый детектор 49.1(49.2), системы 50.1(50.2) ФАПЧ. Изобретение направлено на повышение помехоустойчивости и достоверности определения местоположения путем подавления ложных сигналов. 4 ил.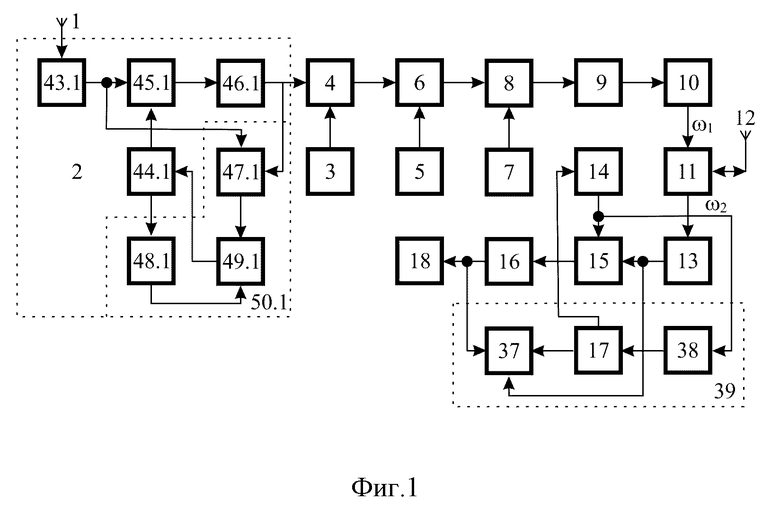
Дирижабль, содержащий корпус с несколькими отсеками, заполненными несущим газом легче воздуха, гондолу с двигателями, топливными баками, кабиной управления, салонами для экипажа и наблюдателей-исследователей, приборы дистанционного зондирования земной поверхности и атмосферы для лазерного зондирования, видео-, кино- и аэрофотосъемки в различных спектральных диапазонах: видимом, инфракрасном и ультрафиолетовом, откидные и выносные устройства – пробоотборники воздуха, воды и почвы, устройства посадки на неподготовленные участки Земли и водной поверхности и высадки групп исследователей-экологов и ликвидаторов, лабораторное оборудование для получения, обработки и анализа проб воздуха, воды, почв, подпочвенных грунтов, донных отложений, торфа, растительности, а также газоанализаторы, масс-спектрометры, спектрографы, хроматографы, аппаратуру точной координатной привязки по спутниковой информации, аппаратуру оперативной двусторонней связи с другими воздушными, космическими, наземными, морскими и речными исследовательскими центрами, а также обмена результатами наблюдений в режиме реального времени, при этом аппаратура оперативной двусторонней связи на дирижабле и в каждом исследовательском центре выполнена в виде фазового детектора, блока регистрации и последовательно включенных приемной антенны, приемника GPS-сигналов, контроллера, второй вход которого соединен с выходом приборов дистанционного зондирования земной поверхности и атмосферы, фазового манипулятора, второй вход которого соединен с первым выходом задающего генератора, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, первого усилителя мощности, антенного переключателя, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности и второго смесителя, второй вход которого соединен с выходом второго гетеродина, фильтра нижних частот перемножителя, второй вход которого соединен с выходом второго усилителя мощности, и фазового детектора, второй вход которого через фазовращатель на 90° соединен с выходом второго гетеродины, а выход подключен к управляющему входу второго гетеродины, вход блока регистрации соединен с выходом фильтра нижних частот, частоты ωr1 и ωr2 гетеродинов выбраны равными несущим частотам ω1 и ω2 принимаемых сложных сигналов с фазовой манипуляцией ωr1=ω1 и ωr2=ω2 и указанные равенства поддерживаются с помощью систем фазовой автоматической подстройки частот ωr1 и ωr2 гетеродинов, отличающийся тем, что каждый приемник GPS-сигналов выполнен в виде последовательно подключенных к выходу приемной антенны усилителя высокой частоты, смесителя, второй вход которого соединен с первым выходом гетеродина, фильтра нижних частот, перемножителя, второй вход которого соединен с выходом усилителя высокой частоты, и фазового детектора, второй вход которого через фазовращатель на 90° соединен с вторым выходом гетеродина, а выход подключен к управляющему входу гетеродина, вход котроллера соединен с выходом фильтра нижних частот, частота ωr гетеродина выбрана равной несущей частоты ωs принимаемых сложных GPS-сигналов ωr=ωs и указанное равенство поддерживается с помощью системы фазовой автоматической настройки частоты ωr гетеродина.
| ЭКОЛОГИЧЕСКИЙ ДИРИЖАБЛЬ | 2016 |
|
RU2621406C1 |
| WO 2001068447 A2, 20.09.2001 | |||
| US 8011615 B2, 06.09.2011. | |||

